lUigi caligaRiS
STeFano FaVa
caRlo TomaSello
anTonio piVeTTa
Tecnologie meccaniche
e applicazioni
Per gli Istituti Professionali
settore Industria
e Artigianato
2
HOEPLI
lUigi caligaris
stefano fava
carlo tomasello
Tecnologie Meccaniche
e Applicazioni
Per gli Istituti Professionali
settore Industria e Artigianato
Volume 2
editore Ulrico Hoepli milano
UN TESTO PIÙ RICCO E SEMPRE AGGIORNATO
Nel sito www.hoepliscuola.it sono disponibili:
• materiali didattici integrativi;
• eventuali aggiornamenti dei contenuti del testo.
Copyright © Ulrico Hoepli Editore S.p.A. 2013
Via Hoepli 5, 20121 Milano (Italy)
tel. +39 02 864871 – fax +39 02 8052886
e-mail [email protected]
www.hoepli.it
Tutti i diritti sono riservati a norma di legge e a norma delle convenzioni internazionali
Indice
Presentazione .................................................................................................................... VI
modulo i componenti meccanici
33
Verifica dei Prerequisiti, 34
modulo H le maccHine semplici e la resistenza
dei materiali
unità I1 Alberi, perni e bronzine ...................................................... 35
1
Verifica dei Prerequisiti, 2
unità H1 Le macchine semplici .............................................................. 3
H1.1
H1.2
Caratteristiche generali, 3
La leva, 3
eva di primo genere, 3 • Leva di secondo genere, 4 • Leva di
L
terzo genere, 5
H1.3
Le carrucole e i paranchi, 5
H1.4
H1.5
Il piano inclinato e le sue applicazioni, 7
Il piano inclinato, 7 • Il cuneo, 7 • La vite, 7
esercitazione guidata H1.1, 9
Verifica degli obiettiVi di unità, 10
unità H2 Sollecitazioni semplici ....................................................... 11
Demnizioni, 11
H2.2
Sollecitazioni semplici, 12
Trazione, 12 • Legge di Hooke, 12 • Compressione, 13 • Taglio, 13
• Flessione, 14 • Torsione, 15
esercitazione guidata H2.1, 17
Verifica degli obiettiVi di unità, 18
unità H3 Sollecitazioni composte e criteri di resistenza
dei materiali ......................................................................................................................... 19
H3.1
H3.2
H3.3
H3.4
I1.3
I1.4
Norme di proporzionamento, 39
Pressione specimca, 42 • Riscaldamento, 43
Sopporti per alberi, 43
Generalità, 43 • Tipi di sopporti, 43
Bronzine, 45
Generalità, 45 • Materiali, 45
esercitazione guidata i1.1, 46
Verifica degli obiettiVi di unità, 47
unità I2 Cuscinetti volventi, guarnizioni e tenute ....... 48
I2.1
eneralità, 48 • Tipi di cuscinetti, 49 • Norme di applicazione e di G
montaggio, 53
I2.2
I2.3
Criteri di scelta dei cuscinetti, 57
Proporzionamento dei cuscinetti con le formule
della durata, 58
apacità di carico, 58 • Durata L10 e L10h, 59 • Calcolo dei cuC
scinetti sollecitati dinamicamente, 59 • Esempio di calcolo di un cuscinetto, 60 • Calcolo dei cuscinetti sollecitati staticamente, 61
I2.4
I2.5
I2.6
Sollecitazioni composte, 19
Lubrificazione dei cuscinetti volventi, 61
ubrimcazione a grasso, 62 • Lubrimcazione con olio, 62 • Metodi L
di lubrimcazione, 62
Cuscinetti volventi lineari, 63
eneralità, 63 • Tipi di cuscinetti volventi lineari, alberi e sopG
porti, 64 • Manicotti a sfere, 64 • Manicotti a sfere aperti a 60°, 64 • Cuscinetti per movimenti assiali e rotativi, 64 • Cuscinetti per movimenti assiali, rotativi e oscillatori, 64 • Cuscinetti con sopporto integrale, 64 • Slitte per movimenti assiali lineari, 65
Guarnizioni e tenute, 66
eneralità, 66 • Tipi di guarnizioni, 66 • Esempi di guarnizioni e G
tenute, 68
esercitazioni guidate i2.1 – i2.2, 70
Verifica degli obiettiVi di unità, 72
Verifica degli obiettiVi di modulo, 73
Flessione e taglio, 19 • Flessione e torsione, 21 • Presso-nessione, 22
Instabilità elastica, 22
Metodo ω, 22
Criteri di resistenza dei materiali, 23
Cuscinetti volventi, 48
Sollecitazione e deformazione, 11
I1.2
Alberi, assi e perni, 35
eneralità, 35 • Alberi e assi orizzontali, 36 • Alberi e assi G
verticali, 38
Il verricello e l’argano, 6
Il verricello, 6 • L’argano, 6
H2.1
Carrucola mssa, 5 • Carrucola mobile, 5
I1.1
Sollecitazioni statiche, dinamiche e a fatica, 23 • Tensioni ammissibili, 24 • Calcolo di verimca, 25 • Calcolo di progetto, 25
modulo l trasmissioni del moto
Esempi di calcolo, 25
Verifica dei Prerequisiti, 76
esercitazioni guidate H3.1 – H3.2, 29
Verifica degli obiettiVi di unità, 31
Verifica degli obiettiVi di modulo, 32
75
unità L1 Organi flessibili: cinghie, funi e catene ........... 77
L1.1
Cinghie piatte, 77
IV
Generalità, 77 • Vantaggi e svantaggi, 78 • Materiali, caratteristiche, sollecitazioni e impieghi, 78 • Pulegge per cinghie piatte, 79
L1.2
Cinghie trapezoidali, 80
Generalità, 80 • Pulegge per cinghie trapezoidali, 81 • Calcolo di
una trasmissione con cinghie trapezoidali, 82
L1.3
Cinghie dentate o sincrone, 86
L1.4
L1.5
L1.6
unità M2 Affilatrici e rettificatrici ................................................ 149
M2.1
M2.2
Generalità, 86
Cinghie scanalate o Poly-V, 87
Dimensionamento delle cinghie scanalate Poly-V, 88
M2.3
Funi metalliche, 89
Generalità, 89 • Avvolgimento dei mli e dei trefoli, 90 • Materiali e dimensionamento delle funi, 90 • Pulegge per funi, 91
esercitazioni guidate l1.1 – l1.2, 94
Verifica degli obiettiVi di unità, 96
M2.4
M2.5
L2.2
Mole, 156
Parametri tecnologici, 160
Tempo macchina, 160 • Potenza di taglio, 162
Dispositivi e norme di sicurezza, 162
Aċlatrice (molatrice), 162 • Rettimcatrice, 162
esercitazione guidata m2.1, 164
Verifica degli obiettiVi di unità, 165
Verifica degli obiettiVi di modulo, 166
unità L2 Ruote dentate .............................................................................. 97
L2.1
Rettificatura e rettificatrici, 150
ettimcatrici in tondo per esterni, 152 • Rettimcatrici in tondo per R
interni, 152 • Rettimcatrici universali, 153 • Rettimcatrici senza centri, 154 • Rettimcatrici per supermci piane, 154 • Rettimcatrici speciali, 156
Abrasivi, 157 • Dimensione dei grani, 157 • Leganti o agglomeranti, 158 • Durezza, 158 • Struttura, 158 • Specimca dei componenti, 158 • Ravvivatura della mola, 158 • Designazione della mola UNI ISO 525, 159
Catene, 91
ipi di catene, 92 • Ruote dentate per catene, 93 • Esempio di T
ruota dentata per catena, 93
Affilatura e affilatrici, 149
ċlatrici manuali, 149 • Aċlatrici universali, 150 • Aċlatrici A
speciali, 150 • Aċlatrici elettrochimiche, 150
Ruote di frizione, 97
Generalità, 97
Ruote dentate cilindriche, 99
Demnizioni, 99 • Rappresentazione convenzionale, 102 • Proporzionamento degli ingranaggi cilindrici, 104 • Minimo numero dei denti – Dentature ribassate – Dentature corrette, 105 • Controllo della dentatura – Forme costruttive – Rendimento, 107
modulo n pneumatica e oleodinamica
L2.3
Ruote dentate cilindriche a denti elicoidali, 110
L2.4
Ruote dentate coniche, 113
unità N1 Circuiti pneumatici, elettropneumatici
e pLC ........................................................................................................................................... 169
L2.5
L2.6
Vite a evolvente, 115
Forme costruttive dell’ingranaggio a vite, 117
Ruotismi, 119
Generalità, 119
L2.7
Riduttori, 121
esercitazione guidata l2.1, 124
Verifica degli obiettiVi di unità, 125
Verifica degli obiettiVi di modulo, 126
modulo m lavorazioni meccanicHe
Verifica dei Prerequisiti, 168
Introduzione, 169
N1.1
Studio delle tecniche per l’eliminazione
dei segnali bloccanti, 169
eneralità, 121 • Classimcazione dei riduttori, 122 • Materiali dei G
riduttori, 122 • Lubrimcazione, 123
Annullamento meccanico, 170 • Collegamenti in cascata, 170
N1.2
Realizzazione del circuito elettropneumatico, 178
N1.3
Operatori logici
nella tecnologia elettrica, 179
Esempi di circuiti elettropneumatici, 181
Il sequenziatore, 183
PLC, 186
Verifica dei Prerequisiti, 128
N1.7
Generalità, 186 • Struttura, 187 • Funzionamento, 189
Elementi di programmazione dei PLC, 189
e variabili e le unità di organizzazione di programma, 190 • Il L
ladder diagram (diagramma a contatti), 190 • Il Grafcet, 191 • Linguaggi strutturati, 195
esercitazioni guidate n1.1 – n1.3, 198
Verifica degli obiettiVi di unità, 201
unità M1 Fresatrici e alesatrici ........................................................ 129
M1.1
Elementi di Elettropneumatica, 177
N1.4
N1.5
N1.6
127
Fresatrici, 129
eneralità e classimcazione, 129 • Fresatrice orizzontale, 130 G
• Fresatrice universale, 131 • Fresatrice verticale, 132 • Fresatrice da attrezzisti, 132 • Attrezzature per fresatrici, 132 • Divisori, 134 • Operazioni speciali di fresatura eseguibili con il divisore, 136
N2.1
M1.2
Utensili per la fresatura, parametri di taglio e potenza
assorbita, 138
Produzione di energia nei sistemi oleodinamici, 205
N2.2
tensili per la fresatura, 138 • Parametri di taglio, 140 • Metodi e U
potenza di fresatura, 141 • Tempi di lavorazione, 143
M1.3
Generalità sulle alesatrici, 144
Organi di regolazione
e comando del moto, 208
Attuatori oleodinamici, 210
Applicazioni dell’Oleodinamica, 211
M1.4
Utensili per le alesatrici, 145
esercitazioni guidate m1.1 – m1.2, 146
Verifica degli obiettiVi di unità, 148
167
unità N2 Oleodinamica ........................................................................... 202
N2.3
N2.4
Elementi di Oleodinamica, 202
esercitazioni guidate n2.1 – n2.2, 212
Verifica degli obiettiVi di unità, 214
Verifica degli obiettiVi di modulo, 216
V
modulo o termodinamica
Verifica dei Prerequisiti, 218
unità O1 principi di Energetica ....................................................... 219
O1.1
O1.2
Calore e temperatura, 219
O2.1
O2.2
iscaldamento dei corpi, 219 • Misura della temperatura, 219 R
• Capacità termica, 220
Trasmissione del calore, 221
Flusso termico, 222
O1.3
Combustibili e comburenti, 223
unità O2 Applicazioni della Termodinamica ................... 230
217
eneralità sulla combustione, 223 • Potere calorimco dei combuG
stibili, 224 • Fabbisogno di aria, 224 • Tipi di combustibili, 225
esercitazione guidata o1.1, 228
Verifica degli obiettiVi di unità, 229
O2.3
O2.4
O2.5
Termodinamica dei gas, 230
S istemi termodinamici, 230 • Le coordinate termodinamiche, 230 • Gas ideale e gas reale, 230
Trasformazioni fondamentali dei gas ideali, 231
rasformazione a volume costante, 231 • Trasformazione a presT
sione costante, 231 • Trasformazione a temperatura costante, 233 • Trasformazione adiabatica, 233 • Trasformazione politropica, 234 • Equazione di stato dei gas perfetti, 234 • Lavoro compiuto da un gas, 234 • Leggi di Gay-Lussac, 234
Principi della Termodinamica, 234
rimo principio della Termodinamica, 234 • Secondo principio P
della Termodinamica, 235
Cicli termodinamici, 235
iclo di Carnot, 235 • Principali cicli termici utilizzati nei motori C
a combustione interna, 236 • Ciclo Otto - Beau de Rochas, 236 • Ciclo Diesel teorico, 237 • Ciclo Sabathè teorico, 238
Il vapore, 238
Vapore acqueo, 238
esercitazione guidata o2.1, 243
Verifica degli obiettiVi di unità, 244
Verifica degli obiettiVi di modulo, 245
VI
Presentazione
L’opera costituisce un corso completo della materia Tecnologie Meccaniche e Applicazioni per il secondo biennio e
per il quinto anno dei nuovi Istituti Professionali settore Manutenzione e Assistenza tecnica.
Il corso si propone di fornire agli allievi degli Istituti Professionali un percorso mnalizzato a far conseguire allo studente, al termine dei cinque anni di studio, risultati di apprendimento che gli consentano di utilizzare, attraverso la conoscenza e l’applicazione della normativa sulla sicurezza, gli strumenti e le tecnologie specimche del settore e di sapersi orientare nella normativa di riferimento; di riconoscere e applicare i principi dell’organizzazione, della gestione e del controllo dei diversi processi produttivi assicurando i livelli di qualità richiesti.
L’opera si compone di tre volumi che sviluppano le Tecnologie meccaniche e le loro applicazioni.
Ciascun volume è suddiviso in moduli indipendenti, articolati in unità didattiche, che rendono possibile l’adozione di percorsi diĊerenziati e adattabili alle necessità delle singole classi e delle specimche realtà.
Ogni modulo si apre con le indicazioni dei prerequisiti, degli obiettivi didattici e delle unità che lo compongono; seguono la verimca dei prerequisiti, le unità didattiche e le verimche di unità e di modulo.
Le unità didattiche si aprono con la dichiarazione degli obiettivi, seguiti dai contenuti, e si chiudono con la verimca di unità.
I contenuti hanno carattere di essenzialità: presentano la sintesi necessaria a risolvere le esercitazioni proposte, sono aggiornati con le più moderne tecnologie e tecniche italiane ed europee e prestano particolare attenzione all’evoluzione tecnologica.
La parte preponderante delle unità didattiche è dedicata ai contenuti, organizzati in modo da coniugare il rigore logico tecnico con un linguaggio essenziale e diretto. Gli esempi e le esercitazioni proposte mirano a rendere chiari e lineari anche gli argomenti più impegnativi.
Il Volume 2, strutturato in sei moduli, tratta le macchine semplici, la resistenza dei materiali, le sollecitazioni semplici, i componenti meccanici, le trasmissioni del moto, le ruote di frizione e dentate, le lavorazioni meccaniche, le tecniche
di programmazione della pneumatica in logica cablata e programmata, i PLC e l’Oleodinamica.
Il modulo H aĊronta lo studio delle macchine e la resistenza dei materiali: nella prima unità didattica si studiano le macchine semplici, quali leve, carrucole, verricello e piano inclinato; la seconda unità aĊronta le sollecitazioni semplici; la terza unità analizza le sollecitazioni composte e i criteri di resistenza dei materiali.
Nel modulo I si esaminano i componenti meccanici: nella prima unità didattica si studiano gli alberi, i sopporti e le bronzine, con le relative indicazioni per il dimensionamento; nella seconda unità si aĊrontano i diversi tipi di cuscinetti volventi, la lubrimcazione e le tenute.
Il modulo L presenta gli organi di trasmissione del moto: la prima unità didattica tratta gli organi nessibili, quali cinghie, funi e catene; la seconda unità aĊronta lo studio dei diversi tipi di ruote dentate, le modalità della loro rappresentazione gramca e termina con i ruotismi e i riduttori.
Il modulo M aĊronta lo studio delle macchine utensili e fornisce indicazioni utili sui parametri tecnologici: la prima unità didattica è mnalizzata allo studio delle fresatrici, delle attrezzature e dei loro utensili; la seconda unità presenta le alesatrici, le aċlatrici e le rettimcatrici.
Il modulo N introduce allo studio dell’automazione, soprattutto per quanto concerne le tecniche di eliminazione dei segnali bloccanti, quali l’annullamento meccanico, la cascata e il sequenziatore. Nella prima unità didattica viene introdotta anche l’Elettropneumatica con il PLC e le relative tecniche di programmazione; nella seconda unità si forniscono elementi di Oleodinamica e si presentano i principi di base, i campi di applicazione e la componentistica.
Nel modulo O si aĊronta il tema dell’Energetica: la prima unità didattica fornisce informazioni di base e analizza i combustibili e la combustione, mentre la seconda unità studia le leggi dei gas, le trasformazioni, i cicli termodinamici e il vapore acqueo.
Luigi Caligaris Stefano Fava Carlo Tomasello
modulo
H
le macchine semplici e la resistenza
dei materiali
H1 Le macchine semplici
H2 Sollecitazioni semplici
H3 Sollecitazioni composte e criteri di resistenza dei materiali
Prerequisiti
Conoscenze
Le principali unità di misura
Le relazioni di proporzionalità fra grandezze
Le equazioni d’equilibrio della Statica
Abilità
Assegnare le principali unità di misura
Utilizzare le relazioni di proporzionalità fra grandezze
Scegliere i materiali in base alle caratteristiche meccaniche
Obiettivi
Conoscenze
Le principali macchine semplici
Le sollecitazioni semplici e composte
Abilità
Valutare e definire i sistemi di carico e il vantaggio nelle macchine semplici
Individuare gli effetti di forze e momenti sugli organi meccanici e riconoscere
le cause che contribuiscono all’usura, alla fatica e alla rottura degli stessi
Competenze di riferimento
Individuare i componenti che costituiscono il sistema
e i vari materiali impiegati
Analizzare il valore, i limiti e i rischi delle varie
soluzioni tecniche con particolare attenzione
alla sicurezza nei luoghi di vita
e di lavoro
modulo H
verificadeiprerequisiti
1. Indicare le unità di misura e i relativi simboli utilizzati
nel SI per le seguenti grandezze:
9. Indicare tre fra le principali proprietà meccaniche
dei materiali.
1. accelerazione [...................]; simbolo: ................................................
2. momento
[...................]; simbolo: ................................................
3. potenza
[...................]; simbolo: ................................................
1.
2.
3.
2.
10.
Dare la definizione di forza (max 20 parole).
........................................................................................................................................................................
........................................................................................................................................................................
........................................................................................................................................................................
3.
Le forze non sono grandezze vettoriali.
Vero
Falso
4. Gli elementi caratteristici di una grandezza vettoriale
sono:
1.
2.
3.
4.
..........................................................................................................................................................
..........................................................................................................................................................
..........................................................................................................................................................
..........................................................................................................................................................
5. La composizione di due forze complanari, e fra loro
ortogonali, si può effettuare con il teorema di:
1. Newton
2. Pitagora
3. Norton
4. Archimede
6. Una forza non può essere scomposta in due direzioni
note se queste ultime sono ortogonali fra loro.
Vero
Falso
7.
Dare la definizione di coppia di forze (max 20 parole).
........................................................................................................................................................................
........................................................................................................................................................................
........................................................................................................................................................................
8. Calcolare le reazioni vincolari di una trave, appoggiata alle estremità, su cui agisce una forza F = 1000 N
posta nella mezzeria.
RA = .......................................................................................................................................................
RB = .......................................................................................................................................................
1.
2.
3.
4.
..........................................................................................................................................................
..........................................................................................................................................................
..........................................................................................................................................................
La velocità media è:
il rapporto fra il tempo e lo spazio percorso
il prodotto dello spazio per il tempo
il rapporto fra lo spazio e il tempo
Il prodotto dell’accelerazione per la velocità
11.
L’accelerazione è una grandezza che rimane sempre
costante.
Vero
Falso
12.
1.
2.
3.
4.
Lo spazio percorso nel moto rettilineo uniforme vale:
s = ma
s = at
s = vt
s = a/t
13.
Qual è la velocità angolare di un punto che si muove su una circonferenza e percorre 10 rad in 5 s?
w = .........................................................................................................................................................
14.
Un corpo con massa m = 10 kg è posto a 3 m di
altezza dal suolo. Calcolare la sua energia potenziale rispetto al piano di un tavolo alto 1 m.
Ep = ........................................................................................................................................................
15.
1.
2.
3.
4.
La potenza è:
il prodotto della forza per lo spazio percorso
il rapporto fra la forza e il tempo di azione
il prodotto della forza per la velocità di spostamento
il rapporto fra la forza e lo spazio percorso
UNITÀ
H1
OBIETTIVI
Conoscenze
Le tipologie di leva
La carrucola e le sue
applicazioni
Il cuneo e la vite
Abilità
Valutare le condizioni
di carico delle leve
e il relativo vantaggio
Calcolare i carichi
applicati alle carrucole,
ai paranchi e ai verricelli
Valutare le forze
trasmesse dalle viti
CONTENUTI
H1.1 Caratteristiche generali
H1.2 La leva
H1.3 Le carrucole e i paranchi
H1.4 Il verricello e l’argano
H1.5 Il piano inclinato
e le sue applicazioni
3
le macchine semplici
H1.1 caratteristiche generali
Un dispositivo in grado di moltiplicare la forza umana prende il nome
di macchina semplice.
Si definisce forza resistente FR la forza da vincere o equilibrare, forza
motrice FM quella fornita alla macchina.
Il rapporto k fra la forza resistente FR e quella motrice FM è definito
vantaggio:
k=
FR
FM
[H1.1]
Di conseguenza le macchine possono essere:
vantaggiose, se FR > FM con k > 1;
svantaggiose, se FR < FM con k < 1;
indifferenti, se FR = FM con k = 1.
Appartengono alle macchine semplici:
le leve;
le carrucole, i paranchi, gli argani e i verricelli;
i piani inclinati e le relative applicazioni (cunei e viti).
Lo studio delle macchine semplici si effettua, in prima approssimazione,
senza tenere conto dell’attrito e applicando le equazioni cardinali della
statica [vol. 1, unità E1].
H1.2 La leva
In relazione alla posizione delle forze rispetto all’appoggio, le leve possono essere di:
primo genere;
secondo genere;
terzo genere.
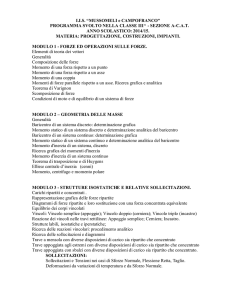
Leva di primo genere
Questa leva è anche detta interfulcrale per la posizione dell’appoggio
(fulcro) posto fra le due forze [fig. H1.1].
bR
bM
O
FR
FM
H1.1 Schema della leva di primo genere.
4
modulo H Le macchine semplici e la resistenza dei materiali
Indicando con bR il braccio della forza FR rispetto al
fulcro O e con bM il braccio della forza FM sempre rispetto a O, si ha la condizione di equilibrio:
FRbR = FM bM
da cui si ricava:
FM =
[H1.2]
k=
da cui si può ricavare, tenendo conto della [H1.1]:
1000 × 0,2
= 160 N
1,25
bM 1,25
=
= 6,25
bR 0,2
FR bM
=
=k
FM bR
Leva di secondo genere
Dalla [H1.2] si può dedurre che:
se bM > bR, k > 1 e la leva è vantaggiosa;
se bM < bR, k < 1 e la leva è svantaggiosa;
se bM = bR, k = 1 e la leva è indifferente.
Si ha una leva di secondo genere quando il fulcro è
posto a un’estremità e la forza motrice FM è applicata
all’estremità opposta [fig. H1.4].
bM
Poiché l’utilizzo di questo tipo di leva prevede sicuramente un vantaggio, è opportuno che il rapporto bM/bR
sia il più grande possibile.
Sono leve di primo genere il palanchino [fig. H1.2], le
forbici, le pinze ecc.
bR
FM
O
FR
H1.4 Schema della leva di secondo genere.
Dalle relazioni [H1.2] e [H1.1] si ricava:
FRbR FM bM = 0;
O
bR
FM
bM
FR
H1.2 Palanchino e relativo schema di carico.
FR bM
=
=k
FM bR
Osservando la figura H1.4, si nota che FM ≤ FR per cui
questo tipo di leva è sempre vantaggiosa o, al massimo, indifferente, ma non sarà mai svantaggiosa; è opportuno che bM sia il più grande possibile rispetto a bR.
Sono leve di secondo genere la carriola [fig. H1.5], lo
schiaccianoci ecc.
esempio
Calcolare la forza necessaria a equilibrare il carico
FR = 1000 N [fig. H1.3] e il vantaggio k.
FM
1,25 m
0,2 m
FM
O
FR = 1000 N
FR
H1.3 Schema di carico di una leva di primo genere.
bR
Dalla [H1.2] si ottiene:
1000 0,2 = FM 1,25
bM
H1.5 Carriola e relativo schema di carico.
Le macchine semplici unità H1
esempio
Calcolare la forza resistente FR che può essere equilibrata con una forza motrice FM = 150 N [fig. H1.6].
Nella figura H1.8 è rappresentata una leva di terzo genere; si sfrutta la grande forza fornita da un pistone
idraulico per sollevare il carico.
FM = 150 N
O
FR
0,25 m
1m
H1.6 Schema di carico e valori delle forze in gioco.
H1.8 Braccio di autogru con pistone idraulico.
Dalla [H1.2] si ricava:
150 ×1 = FR × 0,25
H1.3 Le carrucole e i paranchi
da cui si ottiene:
carrucola fissa
150
FR =
= 600 N
0,25
La figura H1.9 rappresenta una carrucola fissa con lo
schema del sistema di carico. Dall’equazione di equilibrio dei momenti rispetto al punto O, si ha:
Dalla [H1.1] si calcola il valore di k:
k=
FR R = FM R
FM
1
=
=4
FR 0,25
da cui si evince che FR = FM; la carrucola è quindi una
macchina indifferente, la sua utilità consiste nel sollevare carichi ad altezze dipendenti solo dal punto in
cui è appesa la carrucola.
Leva di terzo genere
Nelle leve di terzo genere [fig. H1.7] la forza motrice è
posta fra il fulcro e la forza resistente. In questo caso,
poiché bM < bR, la leva è sempre svantaggiosa e k < 1.
O
R
R
R
bR
FR
bM
FM
FR
O
FM
FR
H1.7 Schema di carico della leva di terzo genere.
Tale rapporto può essere espresso anche nel seguente
modo:
FRbR FM bM = 0; FR =
FM bM
b
; k = M <1
bR
bR
FM
H1.9 Carrucola fissa e relativo schema di carico.
carrucola mobile
Nella carrucola mobile, un’estremità della fune è fissata a un sostegno fisso e all’altra estremità è applicata
la forza motrice.
5
6
modulo H Le macchine semplici e la resistenza dei materiali
In genere la carrucola mobile è
abbinata a una fissa [fig. H1.10].
La figura H1.11b riporta lo schema costruttivo di un paranco
multiplo, detto anche taglia, ottenuto abbinando tre carrucole fisse e tre mobili.
su cui si avvolge una fune con
una estremità fissata al cilindro e
l’altra al carico FR da sollevare. Il
cilindro può essere azionato manualmente agendo su una manovella lunga bM [fig. H1.12].
FM
R
bM
FM
R
O
FR
FM
FM
R
H1.12 Schema costruttivo di verricello
semplice.
FM
Dall’equazione di equilibrio dei
momenti si ottiene:
FR
(a)
(a)
(a)
FR
FM
H1.11 Schema costruttivo di paranco:
O
FR
H1.10 Carrucola mobile e relativo schema
di carico.
a) semplice; b) multiplo.
Il paranco multiplo, con n carrucole mobili, si può ottenere abbinando n paranchi semplici; poiché
il vantaggio del paranco semplice
è k = 2, il vantaggio del paranco
multiplo sarà:
Dall’equazione dei momenti rispetto al punto O, si ottiene:
k = 2n
1
FR R − FM 2 R = 0; FM = FR ; k = 2
2
Il numero di carrucole in una taglia può arrivare fino a 12, con un
vantaggio k = 24.
La carrucola mobile è una macchina vantaggiosa.
paranco semplice e multiplo
La figura H1.11a mostra l’abbinamento costruttivo di una carrucola mobile con una fissa, detto
paranco semplice.
(b
FR R − FM bM = 0; FR =
k=
FR
2R
R
(b)
(b)
FM bM
;
R
bM
R
Da ciò si deduce che maggiore è
la lunghezza della manovella rispetto al raggio del cilindro, più
grande sarà il vantaggio che si
consegue.
L’argano
L’argano differisce dal verricello
per l’asse di rotazione verticale e
perché è provvisto di due o quattro barre di manovra [fig. H1.13].
bM
R
F1M
H1.4 il verricello
e l’argano
F1M
FR
il verricello
Il verricello è costituito da un
cilindro orizzontale di raggio R
F1M
H1.13 Schema costruttivo di argano.
Le macchine semplici unità H1
Se si indica con z il numero di forze F1M applicate alle
barre di manovra alla distanza bM, per l’equilibrio dei
momenti si avrà:
Nel caso in cui la forza motrice FM sia parallela al piano inclinato [fig. H1.14b], vale la seguente relazione:
FM = FR sen α; k =
zF b
F
zF1M bM = FR R; FR = 1M M ; k = R
R
zF1M
Nel caso in cui la forza motrice FM sia parallela alla
base b [fig. H1.14c], vale la seguente relazione:
esempio
Un argano ha le seguenti caratteristiche:
FM = FR tan ; k =
numero di barre di manovra;
lunghezza utile delle barre bM = 1 m;
raggio dell’argano R = 0,40 m.
Nell’ipotesi che la manovra sia compiuta da z = 3 uomini che trasmettono ognuno una forza F1M = 300 N,
calcolare la forza resistente equilibrata e il vantaggio
conseguito:
FR =
k=
1
sen α
3 300 1
= 2250 N
0,4
1
tan
Il rapporto fra l’altezza e la base del piano inclinato
prende anche il nome di pendenza i:
i=
h
= tan
b
il cuneo
Il cuneo è un solido a forma di prisma triangolare su
cui la forza motrice agisce perpendicolarmente alla
testa [fig. H1.15].
2250
FR
=
= 2,5
FM 3 300
FM
α
H1.5 il piano inclinato
e le sue applicazioni
FR
il piano inclinato
α
Il piano inclinato si rappresenta con un triangolo
rettangolo in cui l’ipotenusa corrisponde al piano
inclinato, il cateto b alla base e il cateto h all’altezza
[fig. H1.14a].
FM
Si può scrivere che:
FR1
h
H1.15 Cuneo e relativo schema di carico.
α
α
b
(a)
(b)
FM
FR
H1.14 Piano inclinato:
α
FR
FR2
α
1
FM = 2FR sen ; k =
α
2
2sen
2
FR2
FR1
(c)
FR
a) schema; b) forza
motrice FM parallela
al piano inclinato;
c) forza motrice FM
parallela alla base.
Da ciò si deduce che più è piccolo l’angolo a più grande sarà il vantaggio.
La vite
Gli elementi filettati possono essere utilizzati come
organi di collegamento, oppure come componenti per
la trasmissione di moto e forza (per esempio, la vite
di chiusura di una morsa). In ambedue i casi non è
7
8
modulo H Le macchine semplici e la resistenza dei materiali
possibile trascurare l’attrito che agisce fra i filetti della
vite e del dado e quello dovuto allo strisciamento fra
dado e rosetta [fig. H1.16].
in cui Mt1 serve per trasmettere la forza F, mentre Mt2
serve per vincere l’attrito fra dado e rosetta:
Mt1 = F
Dm
d2
tan ( +
2
);
Mt 2 = F
Dm
f2
2
Nella formula precedente:
d
F = forza assiale esercitata dalla vite;
j = angolo di attrito fra i filetti;
d2 = diametro medio di filettatura;
a = angolo dell’elica;
f2 = coefficiente di attrito fra dado e rosetta.
F
L’angolo dell’elica e quello di attrito si possono calcolare con la seguente relazione:
F
α = arctan
Mt
p
f1
; ϕ = arctan
d
ϑ
π
cos
2
2
in cui:
H1.16 Vite di collegamento che esercita sulle due piastre una forza F.
Nel caso della vite di collegamento, se si vuole valutare con certezza la forza F trasmessa, occorre utilizzare
una chiave dinamometrica che permette di controllare il momento torcente Mt trasmesso al dado di chiusura. Si può scrivere:
Mt = Mt1 + Mt 2
p = passo della filettatura;
J = angolo del profilo (filettature ISO J = 60°);
f1 = coefficiente di attrito fra i filetti della vite e
del
dado.
Nel caso di vite di manovra, se manca il termine dovuto all’attrito fra dado e rosetta, la relazione diventa:
Mt = F
d2
tan ( +
2
)
Le macchine semplici unità H1
esercitazione guidata H1.1
apparecchio di sollevamento
La figura rappresenta una macchina composta da due macchine semplici: un paranco e un verricello, preposta a
sollevare la massa Q = 360 kg.
R
FM = 150 N
400
Q = 360 kg
Dopo aver analizzato attentamente il disegno e nell’ipotesi che al paranco sia applicata una forza motrice FM = 150 N,
calcolare:
1.
2.
3.
4.
il raggio R del paranco;
il vantaggio k1 del verricello;
il vantaggio k2 del paranco;
il vantaggio ktot dell’intero dispositivo.
9
10
unità H1
1
verifica degli obiettivi
Definire una macchina semplice (max 20 parole).
........................................................................................................................................................
........................................................................................................................................................
........................................................................................................................................................
8 Un dispositivo composto da una carrucola mobile
abbinata a una fissa ha un vantaggio:
1.
2.
3.
4.
k = 1/2
k=1
k=2
k=0
2
Indicando con FR la forza resistente e con FM quella
motrice, Il vantaggio k vale:
1.
2.
3.
4.
k = FM − FR
k = FM / FR
k = FR − FM
k = F R / FM
k = ....................................................................
10
3
Una macchina è vantaggiosa quando:
1.
2.
3.
4.
k<1
k=1
k>1
k=0
4
La carriola è una leva di primo genere.
40
Falso
Dalla figura allegata dedurre il valore di FR.
60
FR = ?
FR = ?
FA = 100 N
O
400
800
FR = ....................................................................
FR =
k=
....................................................................
....................................................................
11
La vite può essere utilizzata come dispositivo per
la trasmissione del moto.
Vero
6
Nelle leve di terzo genere la .........................................................
motrice è posta fra il .................................................................... e la forza
..........................................................................................................................................................
7
Nella figura allegata è schematizzato un verricello con indicate le dimensioni del tamburo e la lunghezza della manovella. Nell’ipotesi che FM = 100 N,
calcolare il valore di FR e il vantaggio k.
FM = 100 N
Vero
5
9 Un paranco è composto da 4 carrucole fisse e
4 mobili. Determinare il vantaggio k.
La carrucola fissa è una macchina indifferente.
Vero
Falso
12
Falso
Nel caso della vite di collegamento, se si vuole
valutare con certezza la ..................................................................................,
occorre utilizzare una chiave ......................................................................
che permette di controllare il ..................................................................
torcente trasmesso al ........................................................... di chiusura.
UNITÀ
H2
Conoscenze
La legge di Hooke
Il legame sollecitazionedeformazione
Le sollecitazioni semplici
Abilità
Identificare
le caratteristiche
meccaniche dei materiali
Individuare con
un modello matematico
il legame sollecitazionedeformazione
Individuare
le sollecitazioni semplici
in un corpo e applicare
l’equazione di stabilità
CONTeNUTI
H2.1 Sollecitazione
e deformazione
H2.2 Sollecitazioni semplici
11
SOLLECITAZIONI SEMPLICI
H2.1 Sollecitazione e deformazione
Definizioni
La resistenza dei materiali è quella parte della Meccanica che studia
il comportamento dei materiali, in relazione agli sforzi a cui vengono
sottoposti.
In questo studio i corpi si considerano elastici e isotropi:
elastici, poiché in qualunque fase di carico esiste una corrispondenza
biunivoca tra tensioni interne e deformazioni;
isotropi, poiché presentano proprietà uguali in tutte le direzioni.
Quando si applica una forza a un particolare meccanico, questo si deforma; il materiale si oppone a tale deformazione con delle forze interne
definite tensioni. Quando la tensione è riferita all’area di 1 mm2 è detta
tensione interna unitaria.
Le tensioni interne unitarie possono essere:
perpendicolari, normali alla superficie, e sono indicate con la lettera σ
[fig. H2.1a];
tangenziali, parallele alla superficie, e sono indicate con la lettera τ
[fig. H2.1b].
F
Sezione
T
1
σ
σ
Sezione
1
σ
1
1
1
1
1
1
τ
τ
τ
T
F
(a)
(a)
(b)
(b)
H2.1 Schema di tensioni interne: a) perpendicolari alla superficie; b) tangenziali.
Le deformazioni possono essere:
parallele a un asse, e sono indicate con la lettera ε;
angolari rispetto a due assi, sono dette scorrimenti e indicate con la
lettera γ.
modulo H Le macchine semplici e la resistenza dei materiali
Se un filo metallico è tirato si allunga [fig. H2.2].
Per allungamento totale s’intende la differenza fra
la lunghezza iniziale l0 e la lunghezza finale l1 dovuta
agli sforzi applicati al corpo:
l = l1 l0
[H2.1]
Il parametro E che lega le tensioni e le deformazioni
si definisce modulo di elasticità normale (o modulo di Young).
L’allungamento prodotto dall’applicazione della forza
F vale, secondo le relazioni [H2.2] e [H2.3]:
l=
(a)
(b)
Fl
[mm ]
SE
[H2.5]
È opportuno, a questo punto, rivedere alcuni concetti.
Sottoponendo una provetta a trazione, fino a giungere
a rottura, si determina il grafico carichi Ð allungamenti
riportato nella figura H2.3.
Δl
l1
l0
Carichi unitari
H2.2 Filo sottoposto a trazione: a) scarico; b) caricato con allungamento.
L’allungamento unitario, cioè riferito alla lunghezza
unitaria, equivale alla deformazione ε e si calcola con
la seguente relazione:
=
l
l1 l0
=
l0
l0
E
Ru
ReH
R
Rp eL
[H2.2]
C
B
D
Allungamenti
A
H2.2 Sollecitazioni semplici
Le fibre di materiale sono allungate dalla forza F che
sollecita assialmente il corpo [fig. H2.2b].
Indicando con S la superficie retta [mm2] e con F la
forza [N], la tensione unitaria si calcola con la seguente relazione:
F N
S mm 2
lu – l0
l0
∆l
l0
H2.3 Grafico carichi-allungamenti.
Trazione
=
F
Plasticità
Rm
N
mm2
Elasto-plasticità
F
Elasticità
12
[H2.3]
L’unità di misura N/mm2 nel SI è detta anche MPa
(megapascal).
Fase elastica, tratto AB
In questo tratto il diagramma è rettilineo, cioè esiste
proporzionalità fra carichi e allungamenti e le deformazioni sono reversibili; il carico del punto finale B è
detto carico di proporzionalità Rp.
Se il carico totale letto sulla macchina di prova è Fp e
la sezione iniziale della provetta è S0, si avrà:
Rp =
Fp
N
S0 mm 2
[H2. 6]
Fase elasto-plastica, tratto BCD
Legge di Hooke
Nel campo elastico, cioè quando tolto il carico spariscono le deformazioni, si può ritenere che esista dipendenza lineare tra sforzi e deformazioni; la relazione che esprime tale concetto è la seguente:
=E
[H2.4]
Oltre alle deformazioni elastiche cominciano a verificarsi le prime deformazioni plastiche irreversibili,
possono essere seguite da cedimenti limitati ma improvvisi detti snervamento. Si misurano due carichi:
il primo nel punto C, o carico di snervamento superiore ReH; il secondo nel punto D, o carico di snervamento inferiore ReL.
Sollecitazioni semplici unità H2
Se i carichi totali letti sulla macchina di prova sono
rispettivamente FeL e FeH, si avrà:
ReL =
N
N
FeL
F
; ReH = eH
S0 mm 2
S0 mm 2
[H2.7]
Compressione
Le fibre del materiale vengono accorciate dalla forza
F che sollecita il corpo. Anche per la compressione
[fig. H2.4] è valida la relazione:
=
Fase plastica DEF
F N
S mm 2
[H2.10]
In questa fase le deformazioni sono piuttosto elevate e
irreversibili, dal punto E alla rottura si verifica la strizione della provetta (riduzione di diametro).
Il dato più importante che si ricava è il carico massimo Rm cui resiste la provetta. Questo carico è detto anche resistenza a trazione (o carico di rottura a
trazione) ed è una delle caratteristiche più importanti
del materiale.
Se il carico totale letto sulla macchina di prova è Fm e
la sezione iniziale della provetta è S0, si avrà:
Rm =
N
Fm
S0 mm 2
[H2.8]
F
H2.4 Schema della prova di compressione.
Taglio
Deformazioni
Indicando con lu la lunghezza finale (misurata ricomponendo la provetta) e con l0 la lunghezza iniziale, si
può definire l’allungamento percentuale A% con la
relazione:
A% =
lu l0
100
l0
[H2.9]
Si ha sollecitazione di taglio quando la risultante
delle forze agisce perpendicolarmente al corpo sollecitato e parallelamente a una sua sezione trasversale.
Essendo la forza parallela alla sezione sollecitata, si è
in presenza di tensioni tangenziali τ mentre la tensione normale σ è nulla.
Indicando con T la forza tagliante e con S la sezione
resistente, la relazione del taglio è:
esempio
=
Determinare il modulo di elasticità normale E dell’acciaio di una provetta di 12 mm di diametro e lunga
inizialmente 100 mm che, sottoposta a un carico di
trazione di 5400 N, si è allungata di 0,023 mm.
N
T
S mm 2
[H2.11]
Questa relazione esprime la situazione che si manifesta, per esempio, nelle chiodature dove nella sezione
AB esiste solo la sollecitazione di taglio [fig. H2.5].
Dalle relazioni [H2.3], [H2.4] e [H2.5] si ottiene:
=
l
F
=
SE l
quindi si avrà:
E=
T
A
B
T
Fl
5400 ×100
N
= 2
= 207600
S l 12
mm 2
× 3,14 × 0,023
4
H2.5 Esempio di taglio puro nella chiodatura.
13
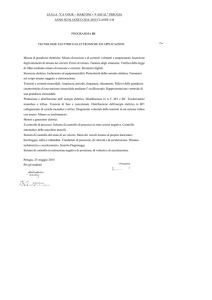
modulo H Le macchine semplici e la resistenza dei materiali
Flessione
Un solido si dice sollecitato a flessione quando le
forze esterne provocano una rotazione delle sezioni
trasversali del solido [fig. H2.6c], che sono parallele
nella trave scarica [fig. H2.6a].
C
N
T
C
T
S2
S1
N
S4
S3
(a)
A-A
σc
Le fibre che stanno sopra la zona neutra, asse N-N
[fig. H2.6c], nella trave caricata sono state accorciate;
la lunghezza C-C è minore della lunghezza delle fibre
che stanno sull’asse N-N, quindi sono state compresse.
Le fibre che sono sotto l’asse neutro sono state allungate; la lunghezza T-T è maggiore della lunghezza
delle fibre che stanno sull’asse N-N, quindi sono state
tirate. Le fibre che stanno sull’asse neutro non hanno
subito deformazioni.
La flessione provoca nella trave, contemporaneamente, sollecitazioni di compressione σc e di trazione σt,
queste sono tanto più grandi quanto più sono lontane
dall’asse neutro N-N [fig. H2.6b]
Nelle sezioni simmetriche rispetto all’asse neutro, le
tensioni si valutano con l'equazione di stabilità della
flessione:
σt
(b)
=±
F
N
C
C
T
S1
S2
Mf
[H2.12]
Wf
Il doppio segno davanti alla relazione indica che, convenzionalmente, si considerano positive le tensioni di
trazione e negative quelle di compressione, per cui:
A
N
T
t
S4
S3
A
=+
Mf
Wf
;
c
=
Mf
Wf
dove Mf indica il momento flettente prodotto dalle
forze applicate alla trave, Wf indica il modulo di resistenza a flessione [mm3]. Il modulo Wf dipende dalla
forma della sezione e dalla posizione dell’asse rispetto
cui si calcola. Nella tabella H2.1 sono riportate le relazioni per determinare Wf per le sezioni più comuni,
calcolato rispetto all’asse neutro x-x.
(c)
H2.6 Effetti della flessione su una trave a sezione rettangolare:
a) trave scarica;
b) distribuzione delle tensioni;
c) trave inflessa.
Tabella H2.1 – Modulo di resistenza a flessione Wf per le sezioni più comuni
Rettangolare
Quadrata
Rombo
Circolare
Circolare forata
D
D
l
x
x
x
l
x
h
14
x
x
x
x
x
x
b
d
Wfx =
bh 2
6
Wfx =
l3
6
Wfx = 2
l3
12
Wfx =
D3
32
Wfx =
(D
4
32d
d4
)
Sollecitazioni semplici unità H2
esempio
Calcolare la tensione unitaria massima nella mezzaria
della trave (punto M) rappresentata nella figura H2.7.
La trave ha sezione rettangolare con base b = 20 mm e
altezza h = 50 mm.
S1
A1
F = 500 N
RA
S2
RB
A
B
M
=
A'
A
=
τmax
A'
g
A
Con l’equazione di equilibri dei momenti rispetto al
punto B, si ottiene:
RA
500 500
1000 F 500 = 0; RA =
= 250 N
1000
Mt
(a)
1000 mm
H2.7 Trave sottoposta a flessione.
O2
g
B
B'
O2
τmax
(b)
H2.8 Trave a sezione circolare sottoposta a torsione: a) trave deformata;
b) distribuzione delle tensioni.
Il momento flettente nel punto M è:
M f max = RA × 500 = 250 × 500 = 125 000 Nmm
Da notare che in Meccanica si utilizza il millimetro e
il momento flettente è espresso in Nmm. Poiché la sezione è rettangolare, il modulo di resistenza alla flessione vale:
Wf =
bh 2 20 502
=
= 833,3 mm3
6
6
La tensione massima si calcola come segue:
σ=±
M f max
Wf
σ t = + 15
=
125000
N
= 15
833,3
mm 2
N
N
; σ c = − 15
2
mm
mm 2
Torsione
La sollecitazione di torsione si manifesta quando
ogni sezione del corpo è costretta a ruotare attorno
al proprio asse con un moto rigido [fig. H2.8a].
Le sollecitazioni normali σ sono nulle. Sono presenti
le sollecitazioni tangenziali τ che aumentano a mano
a mano che il punto considerato si allontana dall’asse neutro, che nella torsione è l’asse longitudinale del
corpo [fig. H2.8b].
Infatti, quando la sezione S2 ruota dell’angolo γ rispetto a S1, intorno al punto O2, si può notare che l’arco
A-A', più lontano da O2, è maggiore dell’arco B-B' che
sottende lo stesso angolo di rotazione; ne consegue che
maggiore è la deformazione più grande è la tensione.
La tensione di torsione è espressa con l'equazione di
stabilità della torsione:
max
=
Mt
Wt
[H2.13]
dove Mt indica il momento torcente prodotto dalle
forze applicate al corpo, mentre Wt indica il modulo
di resistenza a torsione [mm3]. Il modulo Wt dipende dalla forma della sezione.
È possibile determinare il valore esatto di τmax solo
per i solidi a sezione circolare o anulare.
Nella tabella H2.2 sono riportate le relazioni per determinare Wt per le sezioni più comuni, calcolato rispetto al punto centrale O.
15
modulo H Le macchine semplici e la resistenza dei materiali
Tabella H2.2 – Modulo di resistenza a torsione Wt per le sezioni più comuni
Triangolare equilatera
Quadrata
Esagonale
Circolare
Circolare cava
D
D
l
16
l
d
2l
Wt =
l3
20
Wt = 0,208l 3
Wt =1,511l 3
La legge di Hooke, nel caso delle deformazioni angolari, è espressa dalla seguente relazione:
=G
[H2.14]
dove G è il modulo di elasticità tangenziale ed è pari ai
2/5 di E e γ è l’angolo di rotazione espresso in radianti.
Per la sezione circolare piena (quella più utilizzata per
gli alberi soggetti a torsione), l’angolo di torsione in
funzione della lunghezza è espresso dalla relazione:
= 32
Mt l
GD 4
[rad ]
[H2.15]
esempio
Un albero a sezione circolare piena con diametro
D = 30 mm e lunghezza ltot = 200 mm, è sottoposto a
torsione da un momento torcente Mt = 120 000 Nmm.
Nell’ipotesi che il modulo di elasticità normale valga
Wt =
D3
16
Wfx =
(D
4
16d
d4
)
E = 208 000 MPa, calcolare la tensione massima e l’angolo di torsione fra due sezioni distanti l = 100 mm.
Il modulo di resistenza a torsione [tab. H2.2] vale:
Wt =
D3
303
=
= 5301 mm3
16
16
La tensione tangenziale vale:
τmax =
Mt 120 000
N
=
= 22,6
Wt
5301
mm 2
L’angolo di torsione, con G =
γ = 32
2
N
E = 83 200
vale:
5
mm 2
Mt l
120 000 ×100
= 32
= 0,000057 rad =
4
πGD
π × 83 200 × 304
= 0,033°
Sollecitazioni semplici unità H2
esercitazione guidata H2.1
Calcolo delle masse e delle sollecitazioni
Nella figura è rappresentato un solido di acciaio che serve da basamento sul quale appoggia una lastra di marmo.
Sul piano del marmo è posto un cilindro di piombo.
ø1500
750
Piombo
200
800
Acciaio
25
800
900
Marmo
Masse specifiche:
1200
Piombo = 11350 kg/m3
Marmo = 2720 kg/m3
Acciaio = 7850 kg/m3
1800
Dopo aver analizzato attentamente il disegno si calcoli la tensione massima nel basamento di acciaio, tenendo conto
del peso di tutti e tre gli elementi.
17
18
unità H2
1
verifica degli obiettivi
Definire i corpi isotropi (max 10 parole).
........................................................................................................................................................
........................................................................................................................................................
8 La figura acclusa riporta un chiodo ribadito che
collega due lamiere. Sapendo che la sezione retta del
chiodo è S = 10 mm2 e che la sollecitazione di taglio
vale τ = 50 N/mm2, calcolare la forza di taglio T.
2 Nella relazione ∆l = l1 − l0, che cosa indicano le tre
variabili?
1. ∆l =
2. l1 =
3. l0 =
T
T
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
3 Nella legge di Hooke il parametro E che lega le
tensioni e le ....................................................................................... si definisce
.................................................................................. e la sua unità di misura è
..........................................................................................................................................................
4 Il tratto di diagramma carichi-allungamenti che indica la fase elastica può essere sia rettilineo sia curvilineo.
Vero
Falso
S = 10 mm2
T = ....................................................................
9 In una trave a sezione rettangolare e sottoposta a
flessione semplice, tutte le fibre hanno lo stesso valore
di tensione.
Vero
Falso
10
5 Quale significato hanno i seguenti carichi unitari
dedotti dal diagramma carichi-allungamenti?
1. Rm = .................................................................................................................................
2. ReL = ................................................................................................................................
3. Rp = ................................................................................................................................
6 Definire l’allungamento percentuale.
(max 20 parole).
Il modulo di resistenza a flessione Wf dipende
dalla forma della ....................................................................................... e dalla
posizione dell’....................................................................................... rispetto
cui si calcola.
11
La flessione provoca nella trave, contemporaneamente, sollecitazioni di compressione σc e di trazione σt.
Vero
Falso
........................................................................................................................................................
........................................................................................................................................................
........................................................................................................................................................
7
Si ha ................................................................................................... di taglio
quando la risultante delle ................................................................................
agisce perpendicolarmente al corpo sollecitato e
...................................................................................................... a una sua sezione
..........................................................................................................................................................
12
Nella torsione le sollecitazioni ................................................
σ sono nulle. Sono presenti le sollecitazioni ...............................
τ che aumentano a mano a mano che il punto considerato si ....................................................................... dall’asse neutro.
13
Il modulo di elasticità tangenziale G è uguale ai
2/5 di E.
Vero
Falso
UNITÀ
H3
Conoscenze
Flessione-taglio
Flessione-torsione
Presso-flessione
Il carico di punta
Abilità
Indicare le sollecitazioni
composte
Verificare la resistenza
dei corpi in sicurezza
Valutare la resistenza
delle strutture snelle
CONTeNUTI
H3.1 Sollecitazioni composte
H3.2 Instabilità elastica
H3.3 Criteri di resistenza
dei materiali
H3.4 Esempi di calcolo
19
SOLLECITAZIONI COMPOSTE
E CRITERI DI RESISTENZA
DEI MATERIALI
H3.1 Sollecitazioni composte
Nella realtà ad agire su un particolare meccanico non è quasi mai una
sola sollecitazione semplice, ma almeno due in contemporanea.
Le sollecitazioni composte più frequenti sono:
flessione e taglio, soprattutto nelle travi inflesse;
flessione e torsione, presenti negli alberi di trasmissione;
presso-flessione, caratteristiche nelle colonne.
Flessione e taglio
Se i carichi esterni F provocano contemporaneamente flessione e taglio,
in ogni sezione saranno presenti sia tensioni normali σ, dovute al momento flettente Mf , sia tensioni tangenziali τ dovute alla forza di taglio T.
Si consideri la trave inflessa rappresentata nella figura H3.1a.
S’immagini, adesso, di tagliare la trave in una sezione generica Sx. Tenendo conto che ogni sezione trasmette a quella adiacente una forza e
un momento flettente, si devono sostituire alla parte mancante le azioni
che questa trasmetteva alla parte sinistra al taglio [fig. H3.1b] per conservare l’equilibrio.
F1 = 100 N
F2 = 80 N
A
RA = 87 N
RB = 93 N
Sx
B
X
30
80
x
120
(a)
F2 = 80 N
F1 = 100 N
Txd
RA = 87 N
X
A
Txs
Mxd
RB = 93 N
B
Mxs X
30
z
(c)
x
H3.1 Trave inflessa: a) carichi applicati;
(b)
b) parte sinistra del taglio; c) parte destra del taglio.
20
modulo H Le macchine semplici e la resistenza dei materiali
Considerando l’equilibrio rispetto al punto X, si può
scrivere, applicando le equazioni cardinali:
F = 0;
MX = 0
Dalla figura H3.1b si ottiene:
Tx = RA F1 ; M x = RA x F1z
[H3.1]
In pratica occorre sapere in quale sezione è massimo il
taglio e in quale il momento flettente. Si consideri ancora la figura H3.1a e si calcolino i momenti nelle sezioni in
cui sono applicate le forze con le relazioni espresse dalla
[H3.1], tenendo conto solo della parte sinistra, ai vari punti.
Osservando il diagramma del momento flettente si nota che, convenzionalmente, i valori positivi sono riportati sotto la linea dello zero. Il valore massimo Mmax è
nel punto D. In corrispondenza di questa sezione, nel
diagramma di taglio, T vale 0. A sinistra della sezione,
T è pari a RA mentre a destra T assume un valore inferiore, quindi per questa sezione si pone T = RA.
Con questi valori letti sul diagramma, si possono calcolare le tensioni di flessione e di taglio nelle varie sezioni. Nel caso di flesso-taglio, la tensione tangenziale
non è costante su tutta la sezione, ma presenta un valore massimo sull’asse neutro ed è nullo dove è massima la tensione normale [fig. H3.3], per questo motivo
s’introduce un fattore correttivo a [tab. H3.1].
In tali condizioni si avrà:
MA = MB = 0
pertanto:
x
MC = RA × 40 = 3480 Nmm
x
M D = RA × 90 − F1 × 50 = 2830 Nmm
Per determinare il taglio nei vari punti si sommano le
forze che stanno a sinistra.
Nel punto A esiste solo RA, quindi il taglio passa da 0 a
TA = 87 N, nel tratto AC il taglio rimane costante. Nel
punto C il taglio vale TC = RA - F1 = -13 N e rimane
costante nel tratto CD. Nel punto D si somma F2 e il
taglio vale TD = -13 - F2 = -93 N che rimane costante
nel tratto DB. Nel punto B si somma la reazione RB e il
taglio passa da 87 N a TB = 0.
Svolti questi calcoli è possibile tracciare i diagrammi
della figura H3.2.
τm
τmax
100 N
A
97 N
80 N
87 N
C
D
σmax
30
80
40
B
0
0
H3.3 Diagrammi della tensione σ, della tensione media di taglio τm
e tensione effettiva con il valore massimo τmax.
2830 Nmm
3480 Nmm
Il calcolo delle tensioni si esegue con le seguenti
relazioni:
87
100
87
0
0
− 13
max
=
max
=
80
− 93
H3.2 Diagrammi del momento torcente e del taglio su una trave inflessa.
Mf
Wf
[H3.2]
T
a
S
[H3.3]
Sollecitazioni composte e criteri di resistenza dei materiali unità H3
Tabella H3.1 – Fattore correttivo a per il calcolo della tensione massima di taglio
Quadrata
a=
Rombo
3
2
Rettangolare
a =1,6
a=
È prassi comune sostituire le due tensioni con una
sola, detta tensione ideale σid, che produce sul materiale gli stessi effetti ed è più facilmente confrontabile
con le caratteristiche di resistenza del materiale stesso:
σ id = σ
2
max
+ 3τ
2
max
3
2
a=
Anulare
4
3
a=2
Calcolato il momento flettente massimo nel punto A e
il momento torcente con la [H3.5], si possono ricavare
le tensioni σmax di flessione e τmax di torsione:
max
[H3.4]
=
Mt
;
Wt
max
=
Mf
Wf
Anche in questo caso è opportuno calcolare la tensione ideale che produce gli stessi effetti delle due
tensioni:
Flessione e torsione
Questo tipo di sollecitazione è caratteristica degli alberi rotanti che trasmettono un momento torcente
attraverso ruote dentate o pulegge.
Nel modulo E del primo volume di quest’opera sono
presentate le seguenti relazioni:
N = Mt ;
Circolare
=
2 n
60
[H3.5]
dove N è la potenza espressa in watt, n è il numero di
giri/minuto e Mt indica il momento torcente espresso
in Nm.
Nella figura H3.4a è rappresentato schematicamente
un motore elettrico che trasmette il moto a un utilizzatore attraverso una puleggia.
L’albero può essere rappresentato, convenzionalmente, come una trave incastrata all’estremo A e caricata
all’altro estremo da una forza F dovuta al tiro della
cinghia [fig. H3.4b].
id
=
2
max
+3
2
max
In fase di progetto non si conoscono le dimensioni per cui risulta impossibile calcolare le tensioni. In
questo caso si sostituiscono il momento flettente e il
momento torcente con un ipotetico momento flettente ideale che produce nel materiale gli stessi effetti
dei due momenti che agiscono in contemporanea. Il
valore si calcola con la relazione:
3
M fid = M 2f + Mt2
4
[H3.6]
Nel caso di un albero a sezione circolare piena, in cui
Wf = pd3/32, il diametro d vale:
d= 3
32M fid
[H3.7]
am
F
A
l
F
(a)
(a)
(b)
(b)
H3.4 Rappresentazione dell’albero
di un motore elettrico: a) schematica;
b) convenzionale.
21
modulo H Le macchine semplici e la resistenza dei materiali
Se un solido è compresso, ma la forza F a cui è sottoposto non si trova sul suo asse, la sollecitazione è
allora di presso-flessione [fig. H3.5a].
e
σc
Fa
σf
σf
σf - σc
σf + σc
(a)
Se lo stesso filo fosse piantato nel pavimento e lo
stesso peso lo sollecitasse a compressione, probabilmente si avrebbero problemi di stabilità del carico
[fig. H3.6b].
Quando un solido è sollecitato a compressione e il
rapporto tra la sua altezza e la dimensione minima
della sezione è maggiore di 10, esiste la possibilità che
il solido elastico diventi instabile ed infletta lateralmente: si parla allora di carico di punta.
La situazione di equilibrio instabile si può valutare sia
in fase di progetto sia in fase di verifica con vari criteri;
il più comodo è il metodo ω.
Metodo ω
(b)
H3.5 Solido sottoposto a presso-flessione: a) schema di carico;
b) diagrammi delle tensioni.
Se si indica con e il disassamento della forza rispetto
all’asse neutro, il momento flettente vale:
Questo metodo consiste nell’adoperare l’equazione
della compressione, moltiplicando il carico P per un
coefficiente ω che dipende dalla snellezza del corpo (λ).
L’espressione diventa:
c
M f = Fe
Indicando con S la sezione retta del solido, le tensioni
di flessione e compressione valgono rispettivamente:
Mf
Wf
;
c =
H3.2 Instabilità elastica
λ=
l0
ρmin
[H3.9]
La lunghezza libera d’inflessione l0 di un’asta lunga l
si valuta in base ai seguenti vincoli:
asta
incastrata a un estremo e libera all’altro [fig.
H3.7a], l0 = 2l;
asta incernierata ai due estremi [fig. H3.7b], l0 = l;
asta incastrata a un estremo e incernierata all’altro
[fig. H3.7c], l0 = 0,7l;
asta incastrata ai due estremi [fig. H3.7d], l0 = 0,5l.
l0
l0
l
Si immagini un filo di acciaio con diametro d = 5 mm
e lungo l = 500 mm, pendente dal soffitto, che regge un
peso pari a 100 N. Poiché il peso non è molto elevato, il
filo è in grado di reggerlo senza problemi e si verificherà
la condizione di equilibrio indicata nella figura H3.6a.
[H3.8]
dove P rappresenta il carico [N], S è la sezione resistente [mm2] e ω indica il coefficiente funzione della
snellezza λ che si calcola con la seguente relazione:
F
S
Nella figura H3.5b sono stati tracciati i diagrammi
delle tensioni di compressione, di flessione e il diagramma ottenuto dalla somma vettoriale dei primi
due, rappresentante la tensione totale.
P
S
l0
f
=
=
l0
Presso-flessione
¿5
(a)
(a)
P
500
22
(b)
(c)
H3.6 Solidi snelli:
P
(b)
a) trave stabile sottoposta
a trazione; b) trave instabile
sottoposta a compressione.
H3.7 Lunghezza libera d’inflessione di un’asta caricata di punta.
(d)
Sollecitazioni composte e criteri di resistenza dei materiali unità H3
Nella tabella H3.2 sono indicate le espressioni del raggio d’inerzia minimo ρmin, per alcune sezioni comunemente utilizzate.
Nella tabella H3.3 si possono leggere, a titolo di
esempio, i valori di ω per acciai da costruzione S235,
relativi a profilati semplici cavi, quadri, rettangolari
o tondi.
Tabella H3.2 – Espressioni del raggio d’inezia ρmin
per le sezioni più comuni
Rettangolare
Circolare
H3.3 Criteri di resistenza
dei materiali
Circolare cava
d
h
Sollecitazioni statiche, dinamiche e a fatica
b
ρmin =
D
b
12
ρmin =
Per valutare la capacità di un materiale di resistere alle forze applicate è necessario conoscere come queste
ultime sono applicate.
Quando il carico viene applicato in un tempo lungo, le sollecitazioni sono considerate statiche [fig.
H3.8a]; se il tempo di sollecitazione è molto limitato la
sollecitazione è dinamica [fig. H3.8b].
D
D
4
min =
D 2 +d 2
4
Tabella H3.3 – Valori di ω per acciaio da costruzione S235 (σam = 150 N/mm2)
l
0
1
2
3
4
5
6
7
8
9
l
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
1,00
1,00
1,00
1,03
1,06
1,10
1,16
1,22
1,31
1,44
1,61
1,82
2,06
2,34
2,65
2,98
3,34
3,72
4,14
4,58
5,03
5,52
6,03
6,57
7,14
7,73
1,00
1,00
1,01
1,03
1,06
1,11
1,16
1,23
1,32
1,45
1,63
1,84
2,09
2,37
2,68
3,02
3,38
3,76
4,18
4,62
5,08
5,57
6,08
6,63
7,19
1,00
1,00
1,01
1,03
1,07
1,11
1,17
1,24
1,33
1,47
1,65
1,86
2,12
2,40
2,71
3,05
3,41
3,80
4,22
4,67
5,13
5,62
6,14
6,69
7,25
1,00
1,00
1,01
1,04
1,07
1,12
1,17
1,24
1,34
1,48
1,67
1,89
2,14
2,43
2,74
3,08
3,45
3,84
4,27
4,72
5,18
5,67
6,19
6,74
7,31
1,00
1,00
1,01
1,04
1,07
1,12
1,18
1,25
1,36
1,50
1,69
1,91
2,17
2,46
2,78
3,12
3,49
3,88
4,31
4,77
5,22
5,72
6,24
6,79
7,38
1,00
1,00
1,01
1,04
1,08
1,13
1,18
1,26
1,37
1,52
1,71
1,94
2,20
2,49
2,81
3,16
3,53
3,92
4,35
4,81
5,27
5,77
6,30
6,84
7,44
1,00
1,00
1,02
1,05
1,08
1,13
1,19
1,27
1,38
1,53
1,73
1,96
2,22
2,52
2,84
3,19
3,56
3,96
4,40
4,85
5,32
5,82
6,36
6,90
7,50
1,00
1,00
1,02
1,05
1,09
1,14
1,20
1,28
1,40
1,55
1,75
1,99
2,25
2,55
2,88
3,23
3,60
4,01
4,44
4,90
5,37
5,87
6,41
6,96
7,55
1,00
1,00
1,02
1,05
1,09
1,14
1,20
1,29
1,41
1,57
1,77
2,01
2,28
2,58
2,91
3,27
3,64
4,05
4,49
4,94
5,42
5,92
6,46
7,02
7,61
1,00
1,00
1,03
1,06
1,10
1,15
1,21
1,29
1,42
1,59
1,79
2,04
2,31
2,61
2,95
3,30
3,68
4,09
4,53
4,99
5,47
5,98
6,52
7,08
7,67
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
23
24
modulo H Le macchine semplici e la resistenza dei materiali
Carichi
Carichi
Se poi il carico varia in intensità e verso (da positivo a
negativo e viceversa) si è in presenza di sollecitazione
a fatica, che è anche la più pericolosa [fig. H3.8c].
Tempo [min]
Tempo [s]
(b)
Carichi
(a)
Affinché un particolare resista senza pericoli alle sollecitazioni esterne, deve essere sottoposto a tensioni
inferiori al carico di resistenza a trazione tali da non
superare il carico di proporzionalità. Si deve, quindi,
determinare una tensione ammissibile per il materiale in esame che, in funzione del tipo di carico, permetta al materiale stesso di lavorare in tutta sicurezza.
La tensione ammissibile si ricava con le relazioni:
~1/10 di secondo
> 2 minuti
carico di resistenza a trazione Rm;
allungamento percentuale A%.
Tempo [s]
σ am =
Rm
;
gR
(c)
H3.8 Tempo e modo di applicazione dei carichi: a) statici; b) dinamici;
c) a fatica.
Se si vogliono determinare le dimensioni di un oggetto sottoposto a un carico si parla di calcolo di
progetto; se sono noti le dimensioni e i carichi applicati e si vuole sapere se l’oggetto potrebbe rompersi o
deformarsi, si parla di calcolo di verifica.
ReL
gS
[H3.10]
La tensione tangenziale ammissibile si assume in funzione della tensione normale σam:
am
(1/1000 ÷ 1) secondi
σ am =
= 0,577
[H3.11]
am
in cui gR e gS indicano i gradi di sicurezza assunti in
base ai materiali e al tipo di carico. La tabella H3.4 riporta i valori dei gradi di sicurezza in relazione al tipo
di carico preso come riferimento.
Per calcolare il grado di sicurezza relativo ai carichi
statici si può prendere come riferimento sia il carico
Rm sia il carico ReL. Se i carichi sono dinamici o a fatica è opportuno prendere come riferimento il solo
carico ReL.
Carichi dinamici
Tensioni ammissibili
Ogni materiale d’interesse industriale possiede caratteristiche meccaniche deducibili dal diagramma
carichi-allungamenti [fig. H2.3] e fornite dai manuali
tecnici; le più importanti sono:
Poiché i carichi dinamici sono più pericolosi di quelli
statici, si devono utilizzare valori del grado di sicurezza gSd più elevati, se con gS si indica il valore letto nella tabella H3.4:
g Sd = 1,5 g S
carico di snervamento ReL (scritto anche Rs);
[H3.12]
Tabella H3.4 – Gradi di sicurezza gR = Rm/σam e gS = ReL/σam per carichi statici
Materiale
Acciaio
Ghisa
Altri materiali metallici
Legname
Stato
gr
gs
Laminati, fucinati
2,3 ÷ 3
1,5 ÷ 2
Getti
3,2 ÷ 4,2
1,8 ÷ 2,5
Getti
7÷9
–
Laminati, fucinati, estrusi
3÷4
2 ÷ 2,6
Getti
4 ÷ 5,2
2 ÷ 2,8
Travi e tavole
8 ÷ 10
–