Corso di Dinamica delle Strutture
Dispense - parte #1
A.A. 2015∼2016
Versione 1.1.2
Indice
1 Grandezze fisiche
1.1 Un Esempio semplice ma non banale . . . . . . . . . . . . . . . . . . . . . . . . .
3
3
2 Il Modello di Oscillatore Semplice
2.1 Potenza & Lavoro . . . . . . . . . . . . .
2.2 Principio di Bilancio . . . . . . . . . . . .
2.3 Energia . . . . . . . . . . . . . . . . . . .
2.4 Potenze & Energie dell’oscillatore . . . . .
2.5 Principio di Dissipazione . . . . . . . . . .
2.6 Principio di Dissipazione per l’Oscillatore
2.7 Il moto dell’oscillatore . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
6
7
7
7
8
9
9
3 Oscillatore libero
3.1 ζ = 0: moto armonico . . . . .
3.2 0 < ζ < 1: moto sotto-smorzato
3.3 ζ = 1: smorzamento critico . .
3.4 1 < ζ: moto sovra-smorzato . .
3.5 Esempi: la soluzione omogenea
3.6 Decremento logaritmico . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
13
14
14
14
15
4 Oscillatore forzato
4.1 Forzante armonica . . . . . . . . . . . .
4.2 Dissipazione. . . . . . . . . . . . . . . .
4.3 Esempio ‘fai da te’ . . . . . . . . . . . .
4.4 Forzante periodica . . . . . . . . . . . .
4.5 Risposta alla forzante periodica . . . . .
4.5.1 Esempio: onda quadra . . . . . .
4.6 Analisi nel dominio della frequenza . . .
4.7 La Funzione Impulso . . . . . . . . . . .
4.8 L’Impulso Meccanico . . . . . . . . . . .
4.9 La Risposta all’Impulso dell’Oscillatore
4.10 La Funzione Gradino . . . . . . . . . . .
4.11 La Risposta al Gradino dell’Oscillatore .
4.11.1 Esempio: gradino rettangolare .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
21
22
23
26
27
29
31
31
33
34
35
36
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
4.12 L’integrale di convoluzione . . . . . . . . . . .
4.12.1 Esempio: convoluzione armonica . . .
4.13 Forzanti notevoli: la mezza-armonica e l’urto
4.13.1 Mezza armonica . . . . . . . . . . . .
z
z
2
.
.
.
.
z
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
36
38
38
39
1
Grandezze fisiche
La nozione di grandezza fisica è fondamentale; tale nozione non va confusa con quella di unità
di misura. Nel Sistema Internazionale di unità di misura (SI), le grandezze fisiche si dividono in
sette grandezze base e numerose grandezze derivate. Le sette grandezze fisiche fondamentali del Sistema Internazionale, con le relative unità di misura, sono riportate in tabella (1).
Nell’ambito di questo corso avremo a che fare essenzialmente con le prime tre grandezze fonSimbolo
Grandezza fisica
Unità di misura
Simbolo unità
L
lunghezza
metro
m
M
massa
kilogrammo
kg
T
intervallo di tempo
secondo
s
I
intensità di corrente
ampere
A
Θ
temperatura assoluta
kelvin
K
n
quantità di sostanza
mole
mol
Iv
intensità luminosa
candela
cd
Tabella 1: Le Grandezze Fisiche Fondamentali
damentali (lunghezza, massa e intervallo di tempo) e con alcune grandezza derivate di notevole
importanza meccanica. Per evitare di scrivere scomode combinazioni di grandezze, introduciamo
dei simboli per le quattro grandezze derivate di uso più frequente, vedi tabella (2); il numero
1 denota le grandezze adimensionali. Per indicare la grandezza fisica di una data quantità α
Simbolo
Grandezza fisica
Definizione
Unità di misura
Simbolo unità
F
forza
F = M L T −2
newton
N
E
energia, lavoro
E=FL
joule
J
P
potenza
P = E T −1
watt
W
ϑ
angolo
ϑ =arco/raggio
radiante
rad
Tabella 2: Grandezze Fisiche Derivate
useremo la notazione [α]. Ad esempio:
1.1
[dv] = Ln
volume di un corpo n-dimensionale;
[da] = L(n−1)
area di una superficie (n-1)-dimensionale;
[ω] = [rad/s] = 1/T
radianti al secondo, ossia, velocità angolare.
(1)
Un Esempio semplice ma non banale
Sapete la differenza tra forza, lavoro, potenza, energia? Quale di queste nozioni è la più importante? Quello che probabilmente sapete è che alcune volte si ‘paga la potenza’ (un aspirapolvere
3
potente costa di più di uno meno potente, cosı̀ come un forno a microonde, oppure una automobile); altre volte si ‘paga il lavoro’ (l’energia elettrica, il pieno di benzina). In entrambe i due
ultimi casi (energia elettrica, benzina), in realtà paghiamo per un qualcosa che saremo poi in
grado di convertire in lavoro.
Prendiamo un esempio più semplice e più ‘meccanico’: il signor A. deve raggiungere il quarto
piano di un edificio, salendo le scale a piedi, allora:
• l’unica forza in gioco è la forza peso F = m g, dove m è il peso di A. e g = 9.8 m/s2
l’accelerazione di gravità;
• indichiamo con h il dislivello da superare; allora, il lavoro necessario sarà L = F h;
• indichiamo con T il tempo impiegato per salire le scale; allora, la potenza sviluppata sarà
P = L/T .
La cosa importante da notare è che il signor A. non arriverà mai alla meta se non svilupperà,
istante per istante, una certa potenza P : è la potenza che consente di compiere un lavoro.
Possiamo dire che il lavoro è una nozione integrale, in quanto si riferisce ad un intero percorso;
la potenza è una nozione istantanea, in quanto considera un solo istante. Riassumendo:
la potenza è la nozione fondamentale della meccanica.
Continuando con il nostro esempio, possiamo aggiungere che:
• il lavoro meccanico viene estratto dal lavoro metabolico con un’efficienza η < 1;
• il lavoro metabolico Lm necessario sarà dato da Lm = L/η;
• inoltre, il metabolismo è sensibile alla potenza sviluppata (avete sentito parlare di esercizi
aerobici e anaerobici?) e quindi non è cosı̀ semplice calcolare quanti calorie ‘brucierà’ il
signor A. per fare le sue scale.
E l’energia? L’energia non entra in gioco in questo esempio. Nonostante la parola energia sia
una delle parole di origine tecnico-scientifica più usate da tutti, la maggior parte delle cose che
accadono sotto i nostri occhi non ha nulla a che fare con l’energia; piuttosto, il fenomeno più
importane è la dissipazione. Ed infatti, il signor A., riscendendo se scale non riacquisterà il lavoro
che ha usato per salirle; anzi, dovrà spendere altro lavoro per scendere le scale. Ne spenderà
però di meno perchè in nostri muscoli sono progettati per ‘frenare’ e non per ‘accelerare’: avete
notato che quando tornate dalla montagna impiegate meno tempo di quello che avete dedicato
alla salita? Eppure il lavoro fatto è lo stesso (forza peso x dislivello): il motivo è che le gambe
sono in grado di erogare una potenza maggiore quando si va in discesa.
4
2
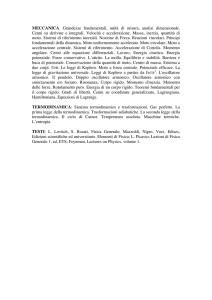
Il Modello di Oscillatore Semplice
m
k
f ela
x
f ext
f ine
f vis
c
x=0
Figura 1: Sinistra: schema classico del modello di oscillatore semplice. Un oggetto di massa m,
vincolato a muoversi lungo l’asse orizzontale, è collegato al suolo tramite una molla di rigidezza
k ed uno smorzatore di viscosità c. La posizione di tutto l’oggetto viene descritta dalla posizione
x di un solo punto; l’origine dell’asse x è preso in corrispondenza della posizione di riposo della
molla. Destra: schema delle quattro forze agenti sull’oggetto considerato; l’unica forza che
possiamo controllare è quella esterna.
Un oscillatore semplice è un sistema ad un solo grado di libertà, soggetto a forze di varia
natura; la configurazione del sistema è descritta dalla funzione x(τ ) che associa ad ogni istante
di tempo τ una posizione x sulla retta reale:
T 3 τ 7→ x(τ ) ∈ R ;
(2)
T = (0, τ1 ) rappresenta il generico intervallo temporale. Data la descrizione del moto (2),
indicheremo con un punto la derivata rispetto al tempo e con una tilde la velocità virtuale:
ẋ , velocità;
x̃ , velocità virtuale.
(3)
Il moto dell’oscillatore semplice è descritto dalle seguenti tre equazioni
m ẍ(τ ) + c ẋ(τ ) + k x(τ ) = f (τ ) , bilancio delle forze, verificato ∀τ ∈ T ;
x(0) = xo ,
posizione iniziale, verificata per τ = 0;
ẋ(0) = vo ,
velocità iniziale, verificata per τ = 0.
(4)
dove la massa m, la viscosità c, e la rigidezza k sono tre grandezze scalari positive. L’equazione
di bilancio delle forze può essere riscritta in modo più significativo dal punto di vista meccanico,
definendo:
Tipo di forza
Prescrizione
Analisi dimensionale
Forza esterna:
f ext (τ ) = f (τ ) ,
Forza elastica:
f ela (τ ) = −k x(τ ) , [x] = L , [k] = F/L ;
Forza viscosa:
f vis (τ )
= −c ẋ(τ ) ,
Forza d’inerzia: f ine (τ ) = m ẍ(τ ) ,
[f ] = F ;
(5)
[ẋ] = L/T , [c] = F T /L ;
[ẍ] = L/T 2 , [m] = M ;
Allora, l’equazione (4)1 si riscrive
f ine (τ ) = f ela (τ ) + f vis (τ ) + f ext (τ ) ,
5
∀τ ∈ T .
(6)
Notiamo che le ultime tre definizioni di forza che appaiono in (5) rappresentano delle relazioni
costitutive, ossia, delle prescrizioni che legano il moto alla forza; ad esempio, la prescrizione per
la forza d’inerzia può essere letta nel seguente modo: prendere il moto x(τ ), derivarlo due volte
rispetto al tempo, e infine moltiplicare il risultato per lo scalare m che rappresenta la massa
del sistema. La prescrizione per la forza viscosa f vis ci dice che tale forza è proporzionale alla
velocità (con il segno meno); la prescrizione per la forza elastica f ela ci dice che tale forza è
proporzionale allo spostamento e si oppone ad esso.
Notiamo infine che queste tre forze dipendono linearmente dal moto; per tale motivo la
soluzione del problema (4) si ricava senza problemi, ed il modello di oscillatore viene detto
semplice.
Tali tre forze descrivono in modo dettagliato cosa avviene al punto materiale sotto esame,
e non possono essere controllate dallo sperimentatore; per tale motivo due di esse, le forze f ela
ed f vis , vengono definite forze interne, dove con l’aggettivo “interne” ci si riferisce al modello,
ossia, descritte nell’ambito del modello:
f in = f ela + f vis .
(7)
L’unica forza su cui possiamo agire per controllare il moto del punto è dunque f ext e per tale
motivo si usa l’aggettivo “esterna”.
2.1
Potenza & Lavoro
Tra le nozioni fondamentali della meccanica vi è quella di potenza. Tale nozione è una nozione
istantanea, ossia, considera il corpo ad un dato istante, e coinvolge simultaneamente sia il moto
del corpo che le forze che agiscono su di esso. Nel caso dell’oscillatore semplice, la potenza è
definita dal prodotto forza per velocità:
(
v(τ ) = ẋ(τ ) potenza (effettiva);
P(v(τ )) = f (τ ) · v(τ ) ,
(8)
v(τ ) = x̃(τ ) potenza virtuale.
Osservazione: la notazione P(v(τ )) allude al fatto che la potenza dipende dalla velocità v(τ );
per semplificare la notazione scriveremo anche P(v), oppure solo P(τ ) per evidenziare la dipendenza dal tempo. Una volta definita la potenza, possiamo introdurre il lavoro elementare dL(v)
compiuto dalla potenza P(v) nell’intervallo di tempo elementare dτ
dL(v) = P(v) dτ = f · v dτ = f · ds ,
(9)
dove ds = v dτ rappresenta uno spostamento elementare. Il lavoro è una nozione integrale che
prende in considerazione un intervallo finito di tempo:
Z τ
Z τ
Z τ
L(v(τ )) =
dL(v(t)) =
P(v(t)) dt =
f (t) · v(t) dt .
(10)
0
0
0
Anche in questo caso possiamo distinguere tra lavoro (effettivo) e lavoro virtuale a seconda che
si integri una potenza od una potenza virtuale. Confrontando le due definizioni precedenti, si
nota che la potenza spesa al tempo τ dipende solo da ciò che accade a quel tempo; al contrario,
il lavoro compiuto al tempo τ dipende da tutto il moto, dall’istante iniziale τ = 0 all’instante
considerato τ . Si noti che la (9) equivale a dire che la derivata temporale del lavoro è la potenza
L̇ = P .
6
Data la classificazione delle forze (5), compresa la nozione di forze interne, definiamo le rispettive
potenze:
P ine (v(τ )) = m ẍ(τ ) · v(τ ) ,
potenza d’inerzia;
P vis (v(τ )) = −c ẋ(τ ) · v(τ ) ,
potenza viscosa;
P ela (v(τ )) = −k x(τ ) · v(τ ) ,
potenza elastica;
P in (v(τ ))
2.2
f vis )
· v(τ ) , potenza interna;
P ext (v(τ )) = f ext · v(τ ) ,
potenza esterna.
=
(f ela
+
(11)
Principio di Bilancio
L’equazione di bilancio delle forze (6) discende da un principio di bilancio del tutto generale che
viene espresso per il tramite della potenza o del lavoro; in questo secondo caso, prende il nome
di Principio dei Lavori Virtuali. Il principio di bilancio, espresso in termini di potenze, richiede
che:
P ine (x̃) = P in (x̃) + P ext (x̃) , ∀ x̃ velocità virtuale .
(12)
E’ semplice verificare che la tale richiesta, dovendo valere per ogni velocità virtuale, equivale
alla equazione di bilancio delle forze (6).
2.3
Energia
La potenza è una nozione fondamentale e del tutto generale: ad ogni processo meccanico è
sempre associata una potenza; al contrario, l’energia è una proprietà peculiare, e solo alcuni
processi meccanici ammettono un’energia. Un processo è detto energetico se esiste una funzione
scalare, detta energia, la cui derivata temporale risulti uguale alla potenza:
d
energia = potenza ;
dτ
(13)
in tal caso si dice che la potenza può essere espressa tramite un differenziale esatto. Unendo la
definizione di energia e la relazione che sussiste tra potenza e lavoro, possiamo scrivere
d
d
energia = potenza =
lavoro .
dτ
dτ
(14)
Calcolare il lavoro compiuto durante un’intervallo di tempo diventa molto semplice: non abbiamo
bisogno di conoscere la legge di evoluzione temporale del moto, né di svolgere materialmente
l’integrale (9), ma basta calcolare la variazione che subisce l’energia tra l’istante iniziale e quello
finale:
Z τ1
Z τ1
d
energia dτ = energia(τ1 ) − energia(τ0 ) .
(15)
Lavoro =
potenza dτ =
τ0
τ0 dτ
2.4
Potenze & Energie dell’oscillatore
Possiamo chiederci se le potenze (11) in gioco nel modello di oscillatore ammettano un’energia;
la risposta è positiva per la potenza delle forze d’inerzia e di quelle elastiche, mentre è negativa
7
per le forze viscose; per quanto riguarda le forze esterne, la domanda rimane in sospeso fin
quando tali forze non verranno specificate. Abbiamo:
1
m ẋ(τ ) · ẋ(τ ) , energia cinetica;
2
1
E(x(τ )) = k x(τ ) · x(τ ) , energia elastica.
2
K(x(τ )) =
(16)
Osservazione: le notazioni K(x(τ )), E(x(τ )) alludono al fatto che l’energia dipende dal moto
x(τ ) (incluse le sue derivate); per semplificare la notazione scriveremo anche in questo caso
K(x), oppure K(τ ) per evidenziare la dipendenza dal tempo; lo stesso per E.
Osservazione: al contrario della potenza e del lavoro, che possono essere effettivi o virtuali,
l’energia considera sempre e solo il moto effettivamente realizzato; si noti ad esempio che nelle
(11) compare sia il moto effettivo x(τ ) (o le sue derivate) che una generica velocità v(τ ), mentre
nelle (16) compare solo il moto effettivo (o le sue derivate).
Per verificare che le (16) siano delle energie, calcoliamone le derivate rispetto al tempo:
1
1
m ẍ(τ ) · ẋ(τ ) + m ẋ(τ ) · ẍ(τ ) = m ẍ(τ ) · ẋ(τ ) = P ine (ẋ) ,
2
2
1
1
Ė(x) = k ẋ(τ ) · x(τ ) + k x(τ ) · ẋ(τ ) = k x(τ ) · ẋ(τ ) = −P ela (ẋ) .
2
2
K̇(x) =
(17)
Dunque, a meno del segno, le due derivate temporali forniscono la potenza effettiva spesa dalle
forze d’inerzia ed elastiche.
2.5
Principio di Dissipazione
Il principio di dissipazione dichiara che la variazione temporale di energia cinetica ed interna del
sistema è sempre minore od uguale alla potenza spesa dalle forze esterne:
K̇(x) + Ė(x) ≤ P ext (ẋ) ,
qualunque sia il moto realizzato x(τ ).
(18)
Tale principio ha un significato meccanico immediato: qualunque sia il sistema con cui abbiamo
a che fare, e qualunque sia il moto che realizziamo applicando delle forze esterne, una parte della
nostra potenza (la potenza esterna) non sarà utilizzata per variare l’energia del sistema.
In termini integrali ciò significa che il lavoro esterno fatto durante un intervallo di tempo
non sarà tutto immagazzinato nel sistema sotto forma di energia, ma una parte di esso andrà
perso. In particolare, in assenza di forze esterne, avremo:
K̇(x) + Ė(x) ≤ 0 ,
qualunque sia il moto realizzato x(τ );
(19)
ossia, l’energia immagazzinata nella configurazione iniziale può al massimo essere conservata
(=), altrimenti, diminuirà con il tempo (<). Utilizzando il principio di bilancio (12), possiamo
rappresentare la potenza esterna come differenza tra potenza d’inerzia ed interna, P ext = P ine −
P in , e riscrivere il principio di dissipazione nel seguente modo
K̇(x) + Ė(x) ≤ P ine (ẋ) − P in (ẋ) ,
qualunque sia il moto realizzato x(τ ).
(20)
Inoltre, essendo K̇(x) = P ine (ẋ), possiamo semplificare ulteriormente la richiesta:
Ė(x) + P in (ẋ) ≤ 0 ,
qualunque sia il moto realizzato x(τ ).
8
(21)
La parte che sarebbe necessaria per verificare l’uguaglianza è detta dissipazione, e può essere
definita nel seguente modo:
D = −(Ė(x) + P in (ẋ)) ;
allora, possiamo riscrivere il principio di dissipazione nel seguente modo:
D + Ė(x) + P in (ẋ) = 0 ,
D ≥ 0,
qualunque sia il moto realizzato x(τ ).
(22)
Osservazione: Il principio di dissipazione nella forma (22) fornisce indicazioni su come si
debbano modellare la dissipazione D e la potenza interna P in : qualunque scelta costitutiva per
le due grandezze deve soddisfare il principio. Nella sezione seguente vedremo come la scelta di
P in per il modello di oscillatore soddisfi il principio.
2.6
Principio di Dissipazione per l’Oscillatore
Verifichiamo ora che il modello di oscillatore soddisfi il principio (22) (se ciò non fosse vero, il
modello sarebbe sbagliato), e vediamo come è fatta la dissipazione D. Nel nostro caso la potenza
delle azioni interne è la somma di due contributi, uno elastico ed uno viscoso:
D + Ė(x) + P ela (ẋ) + P vis (ẋ) = 0 ,
D ≥ 0,
qualunque sia il moto realizzato x(τ ).
(23)
Inoltre, essendo Ė(x) = −P ela (ẋ), e P vis (ẋ) = −c ẋ · ẋ, possiamo scrivere:
D = −P vis (ẋ) = c ẋ · ẋ ,
D ≥ 0,
qualunque sia il moto realizzato x(τ ).
(24)
Dunque la dissipazione è dovuta alle sole forze viscose, ed il principio è sempre verificato (D ≥ 0)
in quanto c > 0 e ẋ · ẋ ≥ 0 (zero solo nel caso di velocità nulla); inoltre, la dissipazione è una
caratteristica del sistema e prescinde dalla presenza di forze esterne. Data la (24), e tenuto conto
del principio di bilancio (12), e della nozione di energia (17), possiamo scrivere:
K̇(x) + Ė(x) + D = K̇(x) + Ė(x) − P vis (ẋ)
= K̇(x) + Ė(x) + P ela (ẋ) − P ine (ẋ) + P ext (ẋ)
(25)
= P ext (ẋ) .
Quest’ultima rappresentazione ci dice che una parte della potenza spesa dalle azioni esterne
contribuisce a variare l’energia del sistema, mentre un’altra parte viene dissipata (si ricordi che
D ≥ 0). Nel caso di forze viscose nulle abbiamo c = 0 e dunque D = 0: la (25) dice che la potenza
delle azioni esterne viene tutta impiegata per variare l’energia del sistema; in particolare, se il
sistema è libero, ossia, in assenza di azioni esterne, si scopre che l’energia rimane costante nel
tempo:
d
K̇(x) + Ė(x) =
(K(x) + E(x) ) = 0 ⇒ K(x) + E(x) = costante .
(26)
dτ
Il risultato (26) viene chiamato Principio di Conservazione dell’energia;
2.7
Il moto dell’oscillatore
Il moto dell’oscillatore semplice è descritto dalla funzione x(τ ), soluzione del sistema (4) che
riscriviamo per comodità:
m ẍ(τ ) + c ẋ(τ ) + k x(τ ) = f ext (τ ) , bilancio delle forze, verificato ∀τ ∈ T ;
x(0) = xo ,
posizione iniziale, verificata in τ = 0;
ẋ(0) = vo ,
velocità iniziale, verificata in τ = 0.
9
(27)
La soluzione del sistema (27) viene affrontato utilizzando una tecnica piuttosto semplice che qui
riassumiamo:
1. L’equazione di bilancio delle forze (27)1 è una equazione lineare che conviene riscrivere in
forma compatta, mettendo in evidenza l’operatore lineare L che descrive l’equazione:
L x(τ ) = f (τ ) ,
∀τ ∈ T ,
con
L=m
d2
d
+c
+k.
dτ 2
dτ
(28)
2. Si cercano le auto-funzioni dell’operatore lineare, ossia quelle funzioni che vengono trasformate in se stesse, a meno di una costante:
L ϕ(τ ) = cost ϕ(τ ) ,
∀τ ∈ T .
(29)
Tutte le funzioni del tipo ϕ(τ ) = u exp(λ τ ), con u, λ costanti, verificano la (29); in
particolare abbiamo:
L ϕ(τ ) = ( m λ2 + c λ + k ) ϕ(τ )
(30)
3. Le auto-funzioni sono il punto di partenza per costruire le soluzioni dell’equazione omogenea, ossia, per risolvere il caso con forzante nulla:
L x(τ ) = 0 ,
∀τ ∈ T
⇒
L ϕ(τ ) = ( m λ2 + c λ + k ) ϕ(τ ) = 0 ,
∀τ ∈ T .
(31)
L’equazione (31) deve essere verificata ad ogni istante; allora, abbiamo due sole possibilità:
soluzione banale con auto-funzione nulla:
ϕ(τ ) = u exp(λ τ ) = 0 ⇔ u = 0 ,
soluzione interessante con auto-funzione non nulla: m λ2 + c λ + k = 0 .
(32)
4. La soluzione generale xg è la somma della soluzione omogenea xom , corrispondente a
forzante nulla, e della soluzione particolare xf , che risolve il caso con forzante f :
xg (τ ) = xom (τ ) + xf (τ ).
Inserendo xg nella (28) si ottiene infatti
L xg = L (xom + xf ) = L xf = f .
La ricerca della soluzione generale xg = xom + xf va dunque sempre fatta in due passi: la ricerca
di xom e di xf . La soluzione omogenea xom è completamente caratterizzata dall’equazione
algebrica di secondo grado (32)2 , detta equazione caratteristica, e la sua ricerca viene effettuata
una sola volte per tutte. Al contrario, non esiste una rappresentazione generale per xf , e la sua
ricerca va fatta caso per caso.
Nel seguito verrà mostrato come si caratterizza xom ; quindi, descriveremo il moto dell’oscillatore soggetto a forze esterne, considerando problemi con difficoltà crescente: 1) forzante
armonica; 2) forzante periodica; 3) forzante impulsiva; 4) forzante generica.
10
3
Oscillatore libero
Iniziamo considerando il sistema (27) in assenza di forzanti esterne; in questo caso il moto è
innescato da condizioni iniziali non nulle. Come detto, la ricerca di soluzioni ci porta a risolvere
l’equazione caratteristica (32)2 : solo alcuni valori di λ sono ammissibili, e il tipo di moto dipende
proprio da tali valori. L’equazione caratteristica viene riscritta nel seguente modo
m λ2 + c λ + k = 0
⇒
λ2 +
c
k
λ+
=0
m
m
⇒
λ2 + 2 ζ ω λ + ω 2 = 0 ,
che evidenzia i due parametri importanti che caratterizzano la risposta del sistema:
r
k
c
c
, fattore di smorzamento.
, pulsazione naturale; ζ =
= √
ω=
m
2ωm
2 km
(33)
(34)
Le soluzioni della equazione caratteristica (33)3 , scritte in termini di ζ ed ω sono due, a cui
corrispondono due auto-funzioni:
p
λ1,2 = −ζ ± ζ 2 − 1 ω ⇒ ϕ1,2 (τ ) = u1,2 exp(λ1,2 τ ) .
(35)
La soluzione xom può allora essere scritta come combinazione lineare delle due auto-funzioni:
xom (τ ) = u1 exp(λ1 τ ) + u2 exp(λ2 τ ) ;
(36)
le costanti u1,2 , che in generale saranno complesse e coniugate, sono determinate dalle condizioni
iniziali. La natura del moto dipende dal valore del termine sotto radice ζ 2 − 1. Infatti, sia ζ che
ω sono numeri reali maggiori od uguali a zero, e le soluzioni λ1,2 possono essere raggruppate in
4 casi:
• ζ = 0: le radici sono immaginarie coniugate e il moto è puramente oscillatorio;
• 0 < ζ < 1: le radici sono complesse coniugate; la parte reale dà smorzamento, quella
immaginaria oscillazioni;
• ζ = 1: le radici sono reali e coincidenti; questo caso separa i moti con oscillazioni da quelli
senza;
• ζ > 1: le radici sono reali e distinte; il moto è smorzato senza oscillazioni.
3.1
ζ = 0: moto armonico
Il caso più semplice è quello in cui lo smorzamento è nullo (c = 0 ⇒ ζ = 0); l’equazione
caratteristica fornisce
m λ2 + k = 0
⇒
λ2 +
k
=0
m
⇒
λ2 + ω 2 = 0 ,
⇒
λ1,2 = ±i ω .
(37)
Abbiamo dunque due radici complesse e coniugate, con parte reale nulla; la soluzione completa
del problema omogeneo può essere scritta come combinazione lineare delle due auto-funzioni:
xom (τ ) = u1 exp(i ω τ ) + u2 exp(−i ω τ ) ;
11
(38)
le costanti u1,2 , che in generale saranno complesse e coniugate, sono determinate dalle condizioni
iniziali. La soluzione (38) ammette altre due rappresentazioni che si ricavano a partire della
fondamentale formula di Eulero
exp(± i α) = cos(α) ± i sin(α) ,
α ∈ R.
(39)
Ponendo nella (38) u1,2 = (a ∓ i b)/2, e usando la (39), si ottiene la prima rappresentazione
cercata
a − ib
a + ib
[cos(ω τ ) + i sin(ω τ ) ] +
[cos(ω τ ) − i sin(ω τ ) ]
2
2
= a cos(ω τ ) + b sin(ω τ ) .
xom (τ ) =
(40)
La (40) è la soluzione generale del problema omogeneo (27) in assenza di forze viscose: l’aggettivo generale si riferisce al fatto che abbiamo risolto solo la prima delle tre equazioni del
modello di oscillatore, senza tener conto delle altre due equazioni che esprimono le condizioni
iniziali; l’aggettivo omogeneo, invece, allude al fatto che abbiamo considerato forze esterne nulle.
Una seconda rappresentazione della soluzione (38) si ottiene a partire dalla (40), utilizzando la
seguente relazione trigonometrica
cos(α − β) = cos(α) cos(β) + sin(α) sin(β) .
(41)
La (41) consente di riscrivere la soluzione facendo comparire una sola funzione trigonometrica
p
xom (τ ) = A cos(ω τ − φ) , con A = a2 + b2 , φ = arctan(b/a) ,
(42)
e per tale motivo il moto viene detto armonico; quest’ultima rappresentazione è molto utile
in quanto mette in evidenza l’ampiezza A e la fase φ del moto. I parametri importanti che
caratterizzano il moto armonico sono i seguenti:
r
k
2π
1
ω=
, pulsazione naturale; T =
, periodo; f = , frequenza.
(43)
m
ω
T
Il valore delle costanti a e b, ovvero il valore di A e φ, sono determinati dalla condizioni iniziali;
allo scopo, conviene usare la rappresentazione (40) che fornisce
a = xo ,
xom (0) = a cos(ω 0) + b sin(ω 0) = xo ,
⇒
(44)
ẋom (0) = −a ω sin(ω 0) + b ω cos(ω 0) = vo .
b = vo .
ω
E’ importante notare che il valore delle costanti si trova risolvendo un problema lineare di due
equazioni in due incognite; tale fatto è del tutto generale, e tipico dei problemi differenziali
lineari ordinari. La (44) si riscrive infatti
#
"
#" # "
#" # "
a
1 0
a
xo
cos(ω 0)
sin(ω 0)
=
=
.
(45)
−ω sin(ω 0) ω cos(ω 0)
b
0 ω
b
vo
Dunque, la soluzione del problema omogeneo (27) in assenza di forze viscose si scrive:
xom (τ ) = xo cos(ω τ ) +
vo
sin(ω τ )
ω
= A cos(ω τ − φ) ,
con
p
A = x2o + (vo /ω)2 ,
12
φ = arctan
vo
ω xo
(46)
.
3.2
0 < ζ < 1: moto sotto-smorzato
In questo caso l’equazione caratteristica (33) ha due radici complesse e coniugate, che conviene
riscrivere nel seguente modo
p
λ1,2 = −ζ ω ± i ωd , con ωd = ω 1 − ζ 2 ;
(47)
la pulsazione ωd , più piccola della pulsazione naturale ω, viene detta pulsazione smorzata. La
soluzione omogenea del problema sotto-smorzato è data da
xom (τ ) = exp(−ζω τ ) [ u1 exp(i ωd τ ) + u2 exp(−i ωd τ ) ] .
(48)
Il termine tra parentesi quadre è del tutto analogo alla soluzione armonica (38); ripetendo quanto
fatto per quel caso, possiamo riscrivere la (48) come segue
xom (τ ) = exp(−ζω τ ) [ a cos(ωd τ ) + b sin(ωd τ ) ]
= A exp(−ζω τ ) cos(ωd τ − φ) ,
con
A=
√
a2 + b2 ,
φ = arctan
b
.
a
(49)
La (49) rappresenta un moto oscillatorio di pulsazione ωd e fase φ, la cui ampiezza decade
esponenzialmente con legge A exp(−ζω τ ); è immediato verificare le seguenti due proprietà
− A exp(−ζω τ ) ≤ xom (τ ) ≤ A exp(−ζω τ ) ,
lim xom (τ ) = 0 ,
τ →∞
(50)
ossia, le oscillazioni del moto sono comprese tra le due curve ±A exp(−ζω τ ), e l’ampiezza tende
a zero al passare del tempo. La velocità del moto armonico smorzato si ottiene derivando rispetto
al tempo la (49)
ẋom (τ ) = exp(−ζω τ ) [ (−a ζ ω + b ωd ) cos(ωd τ ) − (a ωd + b ζ ω) sin(ωd τ ) ]
(51)
= −A exp(−ζω τ ) [ ζ ω cos(ωd τ − φ) + ω sin(ωd τ − φ) ] ;
la velocità si annulla negli istanti τ che verificano la condizione
sin(ωd τ − φ)
= −ζ
cos(ωd τ − φ)
⇒
τ=
arctan(−ζ) + φ
.
ωd
(52)
Le costanti a, b, ovvero, A, φ, che compaiono nella (49) si determinano dalle condizioni iniziali
xom (0) = exp(−ζ ω 0) [ a cos(ω 0) + b sin(ω 0) ] = xo ,
ẋom (0) = exp(−ζω 0) [ (−a ζ ω + b ωd ) cos(ωd 0) − (a ωd + b ζ ω) sin(ωd 0) ] = vo ,
(53)
ossia, in forma matriciale
"
1
0
−ζ ω ωd
#"
a
b
#
"
=
xo
vo
13
#
⇒
a = xo ,
b = v o + ζ ω xo .
ωd
(54)
3.3
ζ = 1: smorzamento critico
Questo
caso si verifica quando la viscosità c assume un valore, detto critico, pari a ccr = 2 m ω =
√
2 k m; l’equazione caratteristica (33) ha due radici reali coincidenti
λ1,2 = −ω .
(55)
La soluzione omogenea del problema con smorzamento critico è data da
xom (τ ) = exp(−ω τ ) [ a + b τ ] .
(56)
La (56) rappresenta un moto che avviene senza oscillazioni, la cui ampiezza decade esponenzialmente con legge τ exp(−ζω τ ), e con velocità ẋom (τ ) = exp(−ω τ ) [ −a ω + b (1 − ω τ ) ]. Le
costanti a, b si determinano al solito dalle condizioni iniziali; in forma matriciale abbiamo
"
#" # "
#
(
1 0
a
a = xo ,
xo
⇒
=
(57)
−ω 1
b
vo
b = vo + ω xo .
Il caso ζ = 1 segnala il confine tra i moti oscillatori e quelli senza oscillazioni; il moto con
smorzamento critico è quello che, a parità di condizioni iniziali, tende più velocemente alla
posizione stazionaria.
3.4
1 < ζ: moto sovra-smorzato
In questo caso l’equazione caratteristica (33) ha due radici reali e distinte che conviene riscrivere
nel seguente modo
p
(58)
λ1,2 = −ζ ω ± ωd , con ωd = ω ζ 2 − 1 ;
La soluzione omogenea del problema sovra-smorzato è data da
xom (τ ) = exp(−ζω τ ) [ a exp(ωd τ ) + b exp(− ωd τ ) ] .
(59)
La (59) rappresenta un moto che avviene senza oscillazioni, la cui ampiezza decade esponenzialmente; come al solito, le costanti a, b si determinano dalle condizioni iniziali.
3.5
Esempi: la soluzione omogenea
Consideriamo il sistema (27) non forzato, e cerchiamo la soluzione omogenea nei 4 casi esaminati,
assumendo come condizioni iniziali xo = 0, ẋo = vo > 0; abbiamo
vo
sin(ω τ ) ,
ω
vo
0 < ζ < 1) xom (τ ) =
exp(−ζ ω τ ) sin(ωd τ ) ,
ωd
ζ = 0) xom (τ ) =
ωd = ω
p
1 − ζ2 ,
(60)
ζ = 1) xom (τ ) = vo τ exp(−ω τ ) ,
1 < ζ) xom (τ ) =
vo
exp(−ζ ω τ ) sinh(ωd τ ) ,
ωd
ωd = ω
p
ζ2 − 1 .
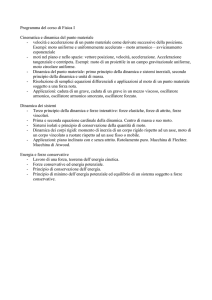
Si ricordi che sinh(α) = [exp(α) − exp(−α)]/2. Alcuni esempi sono disegnati nelle figure 2 e 3.
14
ζ=0
ζ = 0.2
ζ=1
ζ = 1.5
0.4
0.2
xom
ζ=3
ζ=2
ζ = 1.1
0.4
xom 0.2
0
−0.2
0
−0.4
0
1
2
τ
3
4
0
2
4
6
8
10
τ
Figura 2: Andamento nel tempo delle soluzioni (60) (sinistra), e del solo caso sovrasmorzato
(destra), per diversi valori di ζ e con vo = 1, ω = 3.
0.4
± vo exp(−ζ ω τ )
xom (τ )
0.2
xom
0
−0.2
−0.4
0
2
4
6
8
10
τ
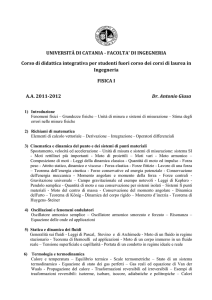
Figura 3: Andamento nel tempo della soluzione sotto-smorzata (60)2 racchiusa dall’inviluppo
± vo exp(−ζ ω τ ); ζ = 0.2, vo = 1, ω = 3.
3.6
Decremento logaritmico
Il coefficiente di smorzamento ζ può essere stimato sperimentalmente misurando due ampiezze
xom (τ ) e xom (τ + T ) in due istanti separati tra loro da un periodo T ; dalla (49) segue infatti:
xom (τ )
exp(−ζ ω τ ) cos(ωd τ − φ)
=
.
xom (τ + T )
exp[−ζ ω (τ + T )] cos[ωd (τ + T ) − φ]
(61)
Ponendo T pari al periodo di un ciclo, T = 2 π/ωd , abbiamo
cos[ωd (τ + Td ) − φ] = cos(ωd τ − φ + ωd T ) = cos(ωd τ − φ + 2 π) = cos(ωd τ − φ) ;
(62)
dunque, possiamo scrivere il rapporto xom (τ )/xom (τ + T ) nel seguente modo
xom (τ )
exp(−ζ ω τ )
=
= exp(ζ ω T ) .
(63)
xom (τ + T )
exp[−ζ ω (τ + T )]
p
Infine, ricordando che T = 2 π/ωd = 2 π/(ω 1 − ζ 2 ) si scopre che l’argomento dell’esponenziale
si riscrive in funzione della sola incognita ζ. Si definisce decremento logaritmico il logaritmo del
15
rapporto xom (τ )/xom (τ + T ), ossia
δ = log
xom (τ )
xom (τ + T )
2πζ
= ζωT = p
.
1 − ζ2
(64)
Per determinare il valore dello smorzamento è sufficiente misurare le ampiezze del moto in due
istanti qualsiasi separati dall’intervallo T , calcolare il logaritmo del loro rapporto e ottenere ζ
dalla (64)
δ
δ
ζ=p
=
+ O(δ 2 ) .
(65)
2
2
2
π
(2 π) + δ
Nel caso di smorzamento molto piccolo, si ottiene una stima più attendibile misurando due
ampiezze del moto in due istanti qualsiasi separati da un’intervallo multiplo del periodo, ad
esempio n T ; abbiamo allora
xom (τ )
= exp(n ζ ω T ) ,
xom (τ + n T )
(66)
ed il decremento logaritmico δ è dato da
δ=
1
log
n
xom (τ )
xom (τ + n T )
.
(67)
Ad esempio, sapendo che l’ampiezza di un moto è diminuita del 50% dopo 5 oscillazioni, possiamo
calcolare
1
xom (τ )
1
xom (τ )
1
δ = log
= log
= log 2 = 0.1386 ,
(68)
5
xom (τ + n T )
5
0.5 xom (τ )
5
da cui, usando l’approsimazione lineare, si ottiene
ζ'
δ
0.1386
=
= 0.0221 .
2π
2π
(69)
0.4
0.2
xom
0
x(τ )
x(τ + T )
−0.2
T = 2 π/ωd
−0.4
0
1
2
3
τ
4
5
6
Figura 4: Misurando l’ampiezza dell’oscillazione in due istanti separati dall’intervallo T = 2 π/ωd
è possibile calcolare il coefficiente di smorzamento ζ.
16
4
Oscillatore forzato
Ci occupiamo ora di descrivere il moto dell’oscillatore soggetto a forze esterne, considerando problemi con difficoltà crescente: 1) forzante armonica; 2) forzante periodica; 3) forzante impulsiva;
4) forzante generica. Riscriviamo qui per comodità il problema da risolvere
m ẍ(τ ) + c ẋ(τ ) + k x(τ ) = f ext (τ ) , bilancio delle forze, verificato ∀τ ∈ T ;
x(0) = xo ,
posizione iniziale, verificata in τ = 0;
ẋ(0) = vo ,
velocità iniziale, verificata in τ = 0.
(70)
Come già detto, la risposta generale xg di un sistema forzato è data dalla somma della soluzione
omogenea xom , corrispondente a forzante nulla, e della soluzione particolare xf , che risolve il
caso con forzante f :
xg (τ ) = xom (τ ) + xf (τ ).
Inserendo la funzione xg nel sistema (70), si ottiene
m ẍf (τ ) + c ẋf (τ ) + k xf (τ ) = f ext (τ ) , bilancio delle forze, verificato ∀τ ∈ T ;
xom (0) + xf (0) = xo ,
posizione iniziale, verificata in τ = 0;
ẋom (0) + ẋf (0) = vo ,
velocità iniziale, verificata in τ = 0.
(71)
Dunque, la soluzione dell’omogenea xom scompare dall’equazione differenziale, ma rimane nelle
condizioni iniziali: le costanti di integrazione a, b dell’omogenea, vedi (40), vanno trovate tenendo
conto anche della soluzione particolare xf .
4.1
Forzante armonica
Consideriamo una forza esterna del tipo
f ext (τ ) = k A cos(α τ ) .
(72)
La costante A ha le dimensioni fisiche di una lunghezza; tale rappresentazione risulterà utile nel
seguito in quanto A è l’ampiezza dello spostamento che provoca la forza stazionaria f ext (τ ) =
k A. Data la (72), possiamo riscrivere l’equazione del moto (71)1 dividendo tutti i termini per
la massa m, ottenendo
ẍf (τ ) + 2 ζ ω ẋf (τ ) + ω 2 xf (τ ) = ω 2 A cos(α τ ) .
(73)
Si suppone che la soluzione particolare xf sia una funzione armonica avente la stessa pulsazione
α della forzante:
xf (τ ) = a cos(α τ ) + b sin(α τ )
(74)
Inserendo la (74) nell’equazione del moto si ottiene
(ω 2 − α2 ) [a cos(α τ ) + b sin(α τ )] + 2 ζ ω α [b cos(α τ ) − a sin(α τ )] = ω 2 A cos(α τ ) .
(75)
Eguagliando i coefficienti delle funzioni seno e coseno si ottiene un sistema lineare che permette
di determinare le costanti a e b
" 2
#" # " 2 #
ω − α2 2 ζ ω α
a
ω A
=
.
(76)
−2 ζ ω α ω 2 − α2
b
0
17
Risolvendo il sistema, abbiamo
a=A
1 − (α/ω)2
,
(1 − (α/ω)2 )2 + (2 ζ α/ω)2
b=A
2 ζ α/ω
.
(1 − (α/ω)2 )2 + (2 ζ α/ω)2
(77)
Il valore delle costanti a, b dipende sia dalle caratteristiche del sistema ω, ζ, sia dalla pulsazione
della forzante α; in particolare, il rapporto β = α/ω ha un ruolo molto importante. L’ampiezza
X e la fase φ del moto xf vengono dunque rappresentate come funzioni di ζ e β:
A
,
[ (1 −
+ (2 ζ β)2 ]1/2
b
2ζ β
φ1 (ζ, β) = arctan
= arctan
,
a
1 − β2
X(ζ, β) = (a2 + b2 )1/2 =
β 2 )2
(78)
e la soluzione particolare (74) si riscrive
xf (τ ) = X(ζ, β) cos[ α τ − φ1 (ζ, β) ] .
(79)
Considerando una forza esterna del tipo
f ext (τ ) = k A sin(α τ ) ,
(80)
è possibile ripetere tutta la procedura appena vista ed ottenere
a=A
−2 ζ α/ω
,
(1 − (α/ω)2 )2 + (2 ζ α/ω)2
b=A
1 − (α/ω)2
;
(1 − (α/ω)2 )2 + (2 ζ α/ω)2
dunque, l’ampiezza X(ζ, β) del moto rimane la stessa, mentre la fase sarà data da
b
1 − β2
φ2 (ζ, β) = π + arctan
= π + arctan
.
a
−2 ζ β
(81)
(82)
In questo caso, per mettere in evidenza lo sfasamento, conviene rappresentare la soluzione
particolare per il tramite della funzione seno; ripartendo dalla (74), si ottiene
xf (τ ) = X(ζ, β) cos[ α τ − φ2 (ζ, β) ] = X(ζ, β) sin[ α τ − φ3 (ζ, β) ] ,
con
φ3 (ζ, β) = π/2 + arctan
1 − β2
−2 ζ β
(83)
.
(84)
Esaminiamo ora cosa accade nei casi estremi di pulsazione nulla, α = 0, corrispondente ad una
forzante stazionaria, e di pulsazione che tende all’infinito, α =→ ∞, ossia, forzante estremamente
veloce; dalla (83) abbiamo1 :
α=0
⇒ β=0
⇒ X = A,
φ2 → 0 ⇒ xf (τ ) = A = cost ,
(85)
α =→ ∞ ⇒ β =→ ∞ ⇒ X → 0 ,
1
Si ricordi che
lim arctan
β→0
1 − β2
−2 ζ β
18
φ3 → π ⇒ xf (τ ) → 0 .
= −π
Dunque, la costante A che abbiamo introdotto nella (72) rappresenta lo spostamento xf (τ )
prodotto da una forza esterna costante nel tempo; inoltre, anche una forzante molto veloce
produce uno spostamento che tende a quello stazionario (addirittura nullo), ma in opposizione
di fase. Per tale motivo viene definito il rapporto G = X/A, detto fattore di amplificazione, che
quantifica gli effetti dovuti ad una forzante armonica rispetto ad una forza di pari intensità, ma
stazionaria
X(ζ, β)
1
G(ζ, β) =
=
.
(86)
2
2
A
[ (1 − β ) + (2 ζ β)2 ]1/2
Possiamo riassumere quanto detto con il seguente prospetto:
IN:
OUT:
f ext (τ ) = k A cos(α τ )
⇒
xg (τ ) = xom (τ ) + G(ζ, β) A cos[α τ − φ1 (ζ, β)] ,
f ext (τ ) = k A sin(α τ )
⇒
xg (τ ) = xom (τ ) + G(ζ, β) A sin[α τ − φ3 (ζ, β)] .
φ3
G 6
f = kA
ζ=0
ζ = 0.1
ζ = 0.2
ζ = 0.4
ζ=1
4
2
π
ζ=0
ζ = 0.1
ζ = 0.2
ζ = 0.4
ζ=1
π/2
1
0
0
1
2
β
0
3
(87)
0
1
2
β
3
Figura 5: Andamento del fattore di amplificazione G(ζ, β) (sinistra) e della fase φ3 (ζ, β) (destra)
al variare del rapporto β, per diversi valori dello smorzamento ζ.
Gli aspetti importanti della risposta di un oscillatore semplice con forzante armonica sono colti
dalle seguenti nozioni:
Pulsazione neutra. La pulsazione α cui corrisponde un fattore di amplificazione unitario viene
detta pulsazione neutra; il corrispondente valore di β viene indicato con βn :
√ p
G(ζ, β) = 1 ⇒ βn = 2 1 − 2 ζ 2 .
(88)
√
√
Per ζ = 0 abbiamo βn = 2; per ζ > 1/ 2 abbiamo sempre G(ζ, β) < 1 tranne che in β = 0.
Pulsazione di risonanza. La pulsazione α che rende massimo il fattore di amplificazione
viene detta pulsazione di risonanza ed indicata con αr ; il corrispondente valore di β viene detto
rapporto di risonanza ed indicato con βr = αr /ω. Il valore βr che rende massima la risposta
dipende dal coefficiente di smorzamento ζ e si trova cercando gli zeri della derivata di G(ζ, β)
rispetto a β; :
p
∂
G(ζ, β) = 0 ⇒ βr = 1 − 2 ζ 2 .
(89)
∂β
19
Fattore di qualità. Il valore massimo del fattore di amplificazione viene detto fattore di qualità
ed indicato con la lettera Q; tale massimo dipende ovviamente da ζ
Q(ζ) = G(ζ, βr ) = p
1
4 ζ4
+
4 ζ 2 (1
−
2 ζ 2)
=
1
+ 0(ζ) = G(ζ, 1) + 0(ζ) .
2ζ
(90)
L’ultima eguaglianza indica che, per piccoli smorzamenti, il massimo si ha in prossimità di β = 1.
Per ζ = 0 la risonanza
√ si verifica quando βr = 1, ossia αr = ω, e comporta una amplificazione
infinita; per ζ > 1/ 2 la risposta non ha più massimi (Q < 1).
√
Pulsazioni di mezza potenza. I due valori βi in cui si verifica G(ζ, βi ) = Q(ζ)/ 2 sono detti
punti di metà potenza
Q(ζ)
G(ζ, βi ) = √
2
⇒
1/2
p
βi = 1 − 2 ζ 2 ± 2 ζ 2 − ζ 4
.
(91)
Tale definizione discende dal fatto che la potenza assorbita dallo smorzatore è proporzionale
al quadrato dell’ampiezza: allora, quando la forzante ha pulsazione αi = βi ω, lo smorzatore
dissipa metà potenza rispetto al massimo che si verifica per αr .
Banda passante. L’intervallo compreso tra i√due punti βi è detto banda passante: per valori
della pulsazione α1 ≤ α ≤ α2 , avremo G > Q/ 2. Abbiamo dalla (91)
β2 − β1 = 2 ζ + 2 ζ 2 + o(ζ 4 ) .
(92)
Si noti che questa nomenclatura ha origine nelle applicazioni elettriche e non meccaniche, dove
l’obiettivo è spesso quello di amplificare e non di smorzare. La Fig.15 riassume tutte queste
nozioni per il caso specifico ζ = 0.3.
20
Banda passante
G
3
ζ=0
ζ = 0.3
√
ζ = 1/ 2
ζ=1
2
Q
√
Q/ 2
1
0
0
β1
√
β2 1/ 2
βr 1
2
3
β
Figura 6: Andamento del fattore di amplificazione G(ζ, β) al variare del rapporto β, per alcuni
valori di ζ. La curva G(0.3, β) (blu) raggiunge il massimo valore Q, indicato con un cerchio,
quando
√ βr = 0.9055; si noti che per β compreso tra β1 e β2 , tale curva è sempre maggiore
√ di
Q/ 2; la fascia colorata verticale rappresenta dunque la banda passante. La curva G(1/ 2, β)
(rosso) decresce in modo monotono a partire da β = 0.
Esempi ζ = 0: moto armonico. In questo caso abbiamo
G(0, β) =
1
;
1 − β2
φ(0, β) = 0 per β < 1 ,
φ(0, β) = π per β > 1 .
(93)
Quindi, la soluzione particolare è in fase per β < 1 e in opposizione di fase per β > 1; quando
α 6= ω, ossia β 6= 1, possiamo usare la (79) che fornisce
f ext (τ ) = k A cos(α τ )
⇒
xg (τ ) = xom (τ ) +
A
cos[α τ − φ1 (0, β)]
1 − β2
(94)
La risonanza si ha per α = ω, e l’amplificazione diventa infinita; in questo caso la formula
precedente non ha più valore e la soluzione particolare è data da una oscillazione armonica la
cui ampiezza cresce linearmente con il tempo:
f ext (τ ) = k A cos(ω τ )
4.2
⇒
xg (τ ) = xom (τ ) +
A
ω τ sin(ω τ )
2
(95)
Dissipazione.
Utilizziamo quanto imparato nella sezione (2.6) per calcolare potenza e lavoro dissipati in un
sistema sotto-smorzato (0 < ζ < 1), sottoposto ad una forzante armonica f ext (τ ) = k A cos(α τ ).
La soluzione omogenea decade con il tempo; esaurito questo contributo, il sistema si muoverà a
regime con legge xf e velocità ẋf
xf (τ ) = G(ζ, β) A cos(α τ − φ1 ) ,
ẋf (τ ) = −α G(ζ, β) A sin[α τ − φ1 (ζ, β)] .
21
(96)
Calcoliamo ora la potenza dissipata D = −P vis = c ẋf · ẋf e la potenza esterna immessa nel
sistema P ext = f · ẋf ; utilizzando la (96), possiamo scrivere
Potenza dissipata = D(ẋf (τ )) = c (G A)2 α2 sin2 (α τ − φ1 ) ,
(97)
Potenza Esterna = P ext (ẋf (τ )) = −k A2 G α cos(α τ ) sin(α τ − φ1 ) .
Dalla precedente espressione si vede che la potenza dissipata dipende dal quadrato dell’ampiezza
del moto X = G A; inoltre, per il tramite di G, dipende da ζ e β:
Dmax = c G2 (ζ, βr ) A2 α2 sin2 (α τ − φ1 ) = c Q2 (ζ) A2 α2 sin2 (α τ − φ1 ) .
(98)
Nei punti di metà potenza abbiamo
Dmax/2 = c G2 (ζ, βi ) A2 α2 sin2 (α τ − φ1 ) =
1
Dmax .
2
(99)
Il lavoro compiuto in un ciclo si ottiene integrando la potenza tra zero e Ta = 2 π/α
Ld =
Z
Ta
D(τ ) dτ = c α π (A G)2 ,
(100)
P ext (τ ) dτ = −k π A2 G sin φ1 .
(101)
0
L
ext
Z
Ta
=
0
Per confrontare le due espressioni occorre eliminare k e sin φ1 da Lext ; dalla (78) otteniamo
G=
[ (1 −
β 2 )2
1
1
=
+ (2 ζ β)2 ]1/2
"
2ζ β
1−β
2ζ β
sin φ1
#1/2 = 2 ζ β ,
2 2
(102)
+1
mentre dalla (34) si ha k = m ω 2 ; utilizzando queste relazioni si ottiene
Lext = −k π A2 G sin φ1 = −c α π (A G)2 = −Ld .
(103)
ossia, tutto il lavoro esterno fatto sul sistema viene dissipato dallo smorzatore.
4.3
Esempio ‘fai da te’
Il modo migliore per comprendere il significato del fattore di amplificazione è fare un semplice
esperimento utilizzando le proprie mani ed un pendolo (un filo con un peso attaccato in basso).
Prendiamo un pendolo di massa m e lunghezza L e sottoponiamo il punto di sospensione ad uno
spostamento armonico orizzontale η(τ ) = ηo sin(α τ ), ad esempio, muovendo la nostra mano
a destra e sinistra; in conseguenza di ciò, il pendolo assumerà un moto oscillatorio e la massa
subirà uno spostamento x(τ ) rispetto la posizione di riposo. Sia θ l’angolo formato dal filo
rispetto la verticale, T la tensione nel filo, m g la forza peso verticale; assumendo oscillazioni
piccole, possiamo dire che la tensione nel filo T è circa pari a m g, mentre la sua componente
orizzontale vale circa m g sinθ, vedi Fig.(7)
m g = T cos θ ' T ,
T sin θ ' m g sin θ ,
22
sin θ '
x−η
.
L
(104)
L’equazione di bilancio relativa al moto orizzontale, considerando anche una forza viscosa, si
scrive
⇒
m ẍ(τ ) + c ẋ(τ ) + m g sin θ(τ ) = 0
m ẍ(τ ) + c ẋ(τ ) +
mg
mg
x(τ ) =
η(τ ) ;
L
L
(105)
ossia, dividendo tutto per m e ricordando che η = ηo sin(α τ )
2
r
2
ẍ(τ ) + 2 ω ζ ẋ(τ ) + ω x(τ ) = ω ηo sin(α τ ) ,
ω=
g
.
L
(106)
La precedente equazione è analoga alla (73): il moto del supporto η(τ ) ha lo stesso effetto di
una forzante. Per tale motivo valgono gli stessi risultati della (85) che conviene ripetere qui con
qualche commento:
La mano si sposta:
⇒ X = A,
φ3 = 0
⇒ il pendolo si sposta insieme alla mano;
velocemente: α =→ ∞ ⇒ X → 0 ,
φ3 → π
⇒ il pendolo rimane fermo;
lentamente: α = 0 ,
⇒ X →→ ∞ ,
alla risonanza: α = ω
φ3 →
π
2
⇒ il pendolo oscilla molto.
(107)
Dunque, muovendo la mano con il periodo giusto è possibile innescare nel pendolo oscillazioni
molto ampie anche se la mano si muove pochissimo;√se il filo è lungo un metro, la risonanza
dovrebbe avvenire con un periodo T = 2 π/ω ' 6.28/ 9.8 ' 2 s.
4.4
Forzante periodica
Consideriamo una forza esterna periodica di periodo Ta , ossia, tale che
f (τ + Ta ) = f (τ ) .
(108)
L’insieme delle funzioni periodiche di egual periodo, corredato delle operazioni di somma tra
funzioni e di prodotto tra una funzione ed uno scalare, è uno spazio lineare:
F = {f : R → R, tali che f (τ + Ta ) = f (τ )} ,
insieme delle funzioni periodiche ;
f (τ ) , g(τ ) ∈ F
somma di funzioni ;
α ∈ R , f (τ ) ∈ F
⇒
⇒
f (τ ) + g(τ ) ∈ F ,
α f (τ ) ∈ F ,
(109)
prodotto funzione per uno scalare .
In questo spazio lineare introduciamo anche la seguente operazione di prodotto interno o prodotto
scalare che associa a due funzioni uno scalare:
Z τ +Ta
2
f (τ ) · g(τ ) =
f (s) g(s) ds .
(110)
Ta τ
Il prodotto scalare permette di definire il modulo di una funzione e di misurare la distanza tra
due funzioni
kf (τ )k = ( f (τ ) · f (τ ) )1/2 ,
modulo di una funzione ;
(111)
d(f (τ ) , g(τ )) = kf (τ ) − g(τ )k , distanza tra due funzioni .
23
η
θ
L
T
T
T cos θ
T sin θ
L sin θ
x
mg
mg
Figura 7: A sinistra vediamo il pendolo in condizioni di riposo, mentre a destra vediamo una
generica configurazione assunta durante il moto, inclinata dell’angolo θ rispetto la verticale. I
due parametri η e x misurano gli spostamenti orizzontali del punto di sospensione e della massa
posta in basso, rispettivamente. L’ipotesi di piccoli spostamenti comporta L sin θ = x − η,
cos θ = 1.
Lo spazio delle funzioni periodiche di periodo Ta è dotato di una base costituita da una funzione costante e dalle funzione armoniche seno e coseno aventi pulsazione multipla di quella
fondamentale α = 2 π/Ta
Base: { 1, cos(j α τ ), sin(j α τ ) } ,
con j = 1, 2, . . . ,
α=
2π
.
Ta
(112)
Per semplificare la notazione, definiamo αj = j α, con j = 1, 2, . . . le pulsazioni multiple di
α; α1 = α è detta pulsazione fondamentale, mentre tutte le altre sono chiamate pulsazioni
superiori. Si noti che le funzioni armoniche vengono ordinate secondo la pulsazione; cos(α1 τ )
e sin(α1 τ ) sono chiamate armoniche fondamentali, le altre armoniche superiori. Si noti anche
che gli elementi della base sono tutti ortogonali tra loro: infatti, per ogni i, j, abbiamo
τ +Ta
2
Ta
Z
2
1 · sin(αj τ ) =
Ta
Z
1 · cos(αj τ ) =
2
sin(αj τ ) · cos(αi τ ) =
Ta
Z
cos(αj s) ds = 0 ,
τ
τ +Ta
sin(αj s) ds = 0 ,
τ
τ +Ta
sin(αj s) cos(αi s) ds = 0 ;
τ
24
(113)
inoltre, le funzioni armoniche hanno modulo uno:
τ +Ta
2
Ta
Z
2
k sin(αj τ )k =
Ta
Z
k cos(αj τ )k2 =
2
cos2 (αj s) ds = 1 ,
τ
τ +Ta
sin2 (αj s) ds = 1 ,
(114)
τ
(115)
Ogni funzione periodica di periodo Ta può essere rappresentata come combinazione lineare di
elementi della base, detta sviluppo di Fourier
∞
f (τ ) = ao
1 X
+
[ aj cos(αj τ ) + bj sin(αj τ ) ] ;
2
(116)
j=1
l’insieme delle costanti ao , aj , bj , con j = 1, 2, . . . viene detto spettro della funzione f , e caratterizza completamente una funzione periodica di periodo Ta e pulsazione fondamentale α = 2 π/Ta ;
ogni costante ha le dimensioni fisiche di una forza. Lo spettro di una funzione è costituito dalle
componenti della funzione data rispetto alle funzioni della base, e si trova proiettando la funzione
sulla base
Z τ +Ta
2
f (s) ds ,
ao = f (τ ) · 1 =
Ta τ
aj
bj
2
= f (τ ) · cos(αj τ ) =
Ta
Z
2
Ta
Z
= f (τ ) · sin(αj τ ) =
τ +Ta
f (s) cos(j α s) ds ,
τ
τ +Ta
f (s) sin(j α s) ds .
(117)
τ
Notiamo infine che il primo termine della serie rappresenta il valor medio f¯ della funzione f (τ )
1
f¯ =
Ta
τ +Ta
Z
f (s) ds .
(118)
τ
Infatti, il prodotto scalare di f (τ ) per la funzione costante 1 fornisce
2
f (τ ) · 1 =
Ta
Z
τ
τ +Ta
2
f (s) ds = 2 f¯ =
Ta
Z
τ +Ta
τ
∞
1 X
( ao +
[ . . . ] ) ds = ao
2
j=1
⇒
ao
f¯ =
.
2
(119)
Ricordiamo che una funzione viene detta pari o dispari a seconda che un cambio si segno
dell’argomento provochi o meno un cambio di segno del valore della funzione:
pari: f (τ ) = f (−τ ) ;
dispari: f (τ ) = −f (−τ ) .
(120)
L’importanza di tale classificazione risiede nel fatto che, rispetto al prodotto scalare scelto,
le funzioni pari e dispari sono ortogonali tra loro; indichiamo con p(τ ) e d(τ ) due funzioni
25
rispettivamente pari e dispari: allora, centrando gli estremi di integrazione nell’origine, possiamo
scrivere
!
Z Ta /2
Z 0
Z Ta /2
2
2
p(s) d(s) ds =
p(s) d(s) ds +
p(s) d(s) ds . (121)
p(τ ) · d(τ ) =
Ta −Ta /2
Ta
−Ta /2
0
Utilizzando le proprietà dell’integrale e delle funzioni pari e dispari, il primo addendo nel termine
di destra può essere trasformato come segue
Z
0
Z
0
−Ta /2
Ta /2
Z
Z
p(s) d(s) ds ,
0
0
Ta /2
Ta /2
p(−s) d(−s) ds = −
p(−s) d(−s) (−ds) =
p(s) d(s) ds =
(122)
Usando questo risultato nella (121) si ottiene quanto detto
2
p(τ ) · d(τ ) =
Ta
Z
Ta /2
−Ta /2
2
p(s) d(s) ds =
Ta
Z
−
Ta /2
p(s) d(s) ds +
0
!
Ta /2
Z
p(s) d(s) ds
= 0.
0
(123)
Data l’ortogonalità tra funzioni pari e dispari, la rappresentazione (116) di una funzione pari
conterrà solo armoniche pari, e dunque bj = 0 per ogni j; analogamente, per una funzione dispari
avremo aj = 0.
4.5
Risposta alla forzante periodica
A questo punto, determinare la risposta dell’oscillatore ad una forzante periodica è piuttosto
semplice; le considerazioni importanti da fare sono tre:
1. conosciamo la risposta in caso di forzante armonica, vedi (87);
2. una funzione periodica si rappresenta come somma di una costante più le varie armoniche,
vedi la (116);
3. il sistema è lineare.
Dunque, la risposta ad una forzante periodica di periodo Ta = 2 π/α sarà data da
∞
1 1 X
xf (τ ) =
ao +
Gj [ aj cos(αj τ − φ1j ) + bj sin(αj τ − φ3j ) ] ;
k
2
(124)
j=1
dove
jα
,
(125)
ω
sono il fattore di amplificazione e la fase relativi ad ogni singola armonica. La (124) mostra che
una armonica, anche di piccola ampiezza ma avente una pulsazione simile a quella di risonanza,
βj ' βr , ha un effetto sulla risposta molto grande. Questo aspetto è molto importante soprattutto per un oscillatore con smorzamento piccolo o nullo, e quindi con fattore di qualità grande
o infinito: una forzante con una piccola armonica vicino alla risonanza provoca risposte enormi.
Gj = G(ζ, βj ) ,
φ1j = φ1 (ζ, βj ) ,
26
φ3j = φ3 (ζ, βj ) ,
βj =
4.5.1
Esempio: onda quadra
Consideriamo la funzione periodica onda quadra, di periodo Ta e ampiezza 2 A, centrata nell’origine; tale funzione è definita dalla richiesta
...
−A per Ta /2 < τ < Ta ,
A per 0 < τ < Ta /2 ,
f (τ ) =
(126)
−A per − Ta /2 < τ < 0 ,
A per − Ta < τ < −Ta /2
...
Un esempio di onda quadra è mostrato nella Fig.(8) per il caso A = 1, Ta = 2; si noti che tale
funzione è costante a tratti, e non è definita nei punti ±i Ta /2; inoltre, è una funzione dispari e
dunque il suo sviluppo di Fourier conterrà solo le armoniche dispari, ossia, ai = 0.
1.0
0.5
�4
�2
2
4
2
4
�0.5
�1.0
1.0
0.5
�4
�2
�0.5
�1.0
Figura 8: Sopra: grafico della funzione onda quadra, con A = 1 e Ta = 2; tale funzione è costante
a tratti e non è definita nei punti ±i Ta /2. Sotto: grafico dell’onda quadra con sovrapposta la
sua rappresentazione di Fourier contenente solo le tre armoniche di ampiezze b1 , b3 , b5 .
Il calcolo dei coefficienti bi fornisce
4 A , i dispari,
2
2 [−1 +
iπ
bi = f (τ ) · sin(i α τ ) =
f (s) sin(i α s) ds = −
=
Ta τ
iπ
0 , i pari.
(127)
e dunque lo spettro dell’onda quadra contiene solo le costanti bi con i dispari; il suo sviluppo di
Fourier fornisce
∞
4A X 1
f (τ ) =
sin(αj τ ) ;
(128)
π
j
Z
τ +Ta
(−1)i ] A
j=1,3,5,...
27
Un confronto tra l’onda quadra e la sua rappresentazione di Fourier troncata alle prime tre
armoniche non nulle è mostrata in Fig.(8). La risposta dell’oscillatore all’onda quadra sarà
fornita dalla (124) adattata al caso in esame
∞
X
Gj
1
4A
xf (τ ) =
sin(αj τ − φ3j ) ;
(129)
k
π
j
j=1,3,5,...
Un grafico molto importante si ottiene sovrapponendo lo spettro della forzante (una caratteristica
dell’ingresso) al fattore di amplificazione (una caratteristica del sistema): in questo modo è
possibile visualizzare a colpo d’occhio le armoniche che saranno amplificate oppure ridotte.
La Fig.(9) si riferisce ad un oscillatore con caratteristiche ζ = 0.2, ω = 10. Lo spettro
dell’onda quadra la variare della pulsazione è mostrato con dei pallini blu: il primo pallino risiede
nel punto (α, b1 ) = (π, 4/π), il secondo in (2 α, b2 ) = (2 π, 0), il terzo in (3 α, b3 ) = (3 π, 4/(3 π)) e
cosı̀ via; si nota che i pallini in posizione dispari hanno valori sempre più bassi, mentre i pallini in
posizione pari hanno valore nullo. La curva continua rappresenta il grafico di G(ζ, β) al variare
della pulsazione, e presenta il massimo in prossimità della pulsazione naturale ω = 10.
La terza armonica ha pulsazione 3 π ' 9.424, un valore molto vicino a quello della pulsazione
naturale e dunque vicino alla risonanza. I quadrati rossi rappresentano lo spettro del moto xf e
mostrano l’effetto del fattore di amplificazione: il valore della loro ordinata è dato dal prodotto
bj G(ζ, βj ). Si nota che la prima armonica, alta, viene leggermente amplificata; la seconda
armonica ha valore nullo; la terza armonica, meno importante della prima, viene amplificata
tanto che il suo contributo diventa paragonabile a quello della prima armonica; da qui in poi, i
contributi sono trascurabili.
Adf
2.5
2.0
1.5
�
�
�
1.0
0.5
�
�
�
�
10
�
�
20
�
�
�
�
�
30
�
�
�
�
�
�
40
�
�
�
�
50
�
�
�
�
�
60
�
�
�
rad
70
sec
Figura 9: Grafico del fattore di amplificazione G(ζ, β) per il caso ζ = 0.2, ω = 10, al variare
della pulsazione (curva blu). I pallini blu rappresentano lo spettro bi dell’onda quadra, mentre
i quadrati rossi sono lo spettro della risposta xf ; la posizione relativa del quadrato rispetto al
pallino mostra l’effetto del fattore di amplificazione sulle varie armoniche.
28
4.6
Analisi nel dominio della frequenza
Fino ad ora abbiamo risolto le equazioni del moto nel dominio del tempo, ossia, cercando al
funzione τ 7→ x(τ ). Inoltre, abbiamo appena visto come sia importante determinare la risposta
ad una forzante periodica, e come tale risposta dipenda dal contenuto armonico della forzante.
Tutto ciò suggerisce di studiare il moto del pendolo nel cosiddetto dominio della frequenza: data
una forzante con un determinato spettro, come sarà fatto lo spettro della risposta?
Data la forzante di periodo Ta , con α = 2 π/Ta = α1 armonica fondamentale, le importanti
relazioni di Eulero forniscono
1
[exp(i αj τ ) + exp(−i αj τ )] ,
2
i
sin(αj τ ) = − [exp(i αj τ ) − exp(−img αj τ )] .
2
(130)
Tali relazioni permettono di rappresentare la serie di Fourier (116) in forma esponenziale
cos(αj τ ) =
f (τ ) =
∞
X
Pj exp(i αj τ ) .
(131)
j=−∞
I coefficienti della serie Pj saranno in questo caso numeri complessi, dati dalla relazione
1
Pj =
Ta
Z
Ta
f (τ ) exp(−i αj τ ) dτ ,
j = 0, ±1, ±2, . . . .
(132)
0
Si noti che, per definizione, i coefficienti Pj e P−j sono complessi coniugati; grazie a questo,
i termini immaginari della serie (131) si elidono a vicenda e si ottiene una funzione reale. I
numeri complessi Pj definiscono lo spettro della forzante, analogamente ai numeri reali aj e bj .
La risposta alla forzante si ottiene moltiplicando lo spettro Pj per il fattore di amplificazione
complesso Hj definito da
Hj = H(ζ, βj ) =
1
.
(1 − βj2 )2 + i (2 ζ βj )
(133)
Dunque, le componenti armoniche di pulsazione αj presenti nella forzante saranno amplificate
di Hj volte, producendo un’uscita di intensità Hj Pj .
Algoritmo
1. f (τ ) funzione di periodo Ta
2. Sviluppo in serie di Fourier:
∞
1 X
f (τ ) = ao +
[ aj cos(αj τ ) + bj sin(αj τ ) ] , serie reale
2
j=1
∞
X
f (τ ) =
(134)
Pj exp(i αj τ ) ,
serie complessa
j=−∞
3. Spettro
ao , a j , b j ∈ R ,
j = 1, 2, . . . , spettro reale
(135)
Pj ∈ C ,
j = ±1, ±2, . . . ,
29
spettro complesso
4. Amplificazione:
Gj aj , Gj bj , amp. reale
(136)
Hj Pj ,
amp. complessa
5. Campionamento della funzione negli istanti tj = j ∆τ , j = 0, 1, . . .
fj = f (τj )
30
4.7
La Funzione Impulso
La funzione impulso, indicata con δ, e chiamata anche funzione di Dirac, è definita dalla richiesta
Z ∞
δ(τ ) dτ = 1 .
(137)
δ(τ ) = 0 , τ 6= 0 ,
−∞
Si tratta di una funzione molto particolare, nulla ovunque tranne che in un punto, e che ha
integrale pari ad uno. La funzione di Dirac può essere costruita facendo un limite: consideriamo
la funzione:
1
, −ε < τ < ε;
ε
2
2
δε (τ ) =
(138)
0 , altrove.
La funzione δε (τ ) è diversa da zero solo nell’intervallo ε a cavallo dell’origine, dove vale 1/ε; il
suo integrale vale dunque 1: base x altezza = ε × 1/ε = 1. Al tendere di ε a zero, la funzione
δε (τ ) assume valori sempre più elevati, in un intervallo sempre più ristretto, ed il suo integrale
rimane sempre pari ad uno, vedi Fig.(10); possiamo allora scrivere δ(τ ) = limε→0 δε (τ ).
δε (τ )
δε (τ )
δε (τ )
1
ε
1
ε
1
ε
τ
τ
ε
ε
τ
ε
Figura 10: La funzione δε (τ ) assume la forma di un rettangolo sempre più allungato al tendere
a zero di ε. L’area di tale rettangolo rimane costante ed uguale ad uno.
L’impulso δ(τ ) può essere traslato in punti diversi dall’origine considerando la funzione composta
δ(τ − τ̄ ) che avrà valore diverso da zero solo in τ = τ̄ . Data la proprietà definitoria (137),
possiamo usare la funzione δ(τ ) per valutare una generica funzione in un istante prescelto:
Z ∞
δ(τ − τ̄ ) f (τ ) dτ = f (τ̄ ) .
(139)
−∞
Quindi, la funzione δ(τ − τ̄ ) f (τ ) vale zero ovunque tranne che in τ = τ̄ , ed il suo integrale è
proprio il valore di f in τ̄ .
4.8
L’Impulso Meccanico
Nell’ambito della meccanica la funzione δ viene usata per rappresentare una forza impulsiva,
ovvero un impulso meccanico. Per quantificare l’effetto di un impulso meccanico, ricordiamo la
definizione di quantità di moto p(τ ):
v(τ ) = ẋ(τ ) ,
p(τ ) = m v(τ ) .
(140)
La prima equazione definisce la velocità v(τ ) a partire dal moto x(τ ): si tratta di una equazione
di congruenza; la seconda equazione lega una nozione cinematica, la velocità, ad una dinamica, la
31
δ(τ )
δ(τ − τ̄ )
τ
τ̄
τ
Figura 11: La funzione δ(τ ) è zero ovunque tranne nell’origine dove assume valore infinito
(sinistra); la funzione δ(τ − τ̄ ) è zero ovunque tranne che in τ = τ̄ (destra).
quantità di moto: si tratta di una equazione costitutiva; la costante m, la massa, è un parametro
materiale. Scriviamo l’equazione di bilancio delle forze nella sua forma originaria, in termini di
quantità di moto:
ṗ(τ ) = f (τ ) , ∀t ∈ T , bilancio delle forze, verificato ∀t ∈ T ;
p(0) = po
bilancio della quantità di moto, verificato per t = 0.
(141)
Nella (141) la forza f (τ ) rappresenta la risultante di tutte le forze agenti, a meno della forza
d’inerzia. Nel caso in cui f (τ ) = δ(τ ), possiamo integrare l’equazione di bilancio tra τ = −ε e
τ = ε, per ottenere:
Z ε
Z ε
ṗ(τ ) dτ = p(ε) − p(−ε) =
δ(τ ) dτ = 1 .
(142)
ṗ(τ ) = δ(τ ) , ∀t ∈ T , ⇒
−ε
−ε
Osservazione. La funzione δ non è una funzione continua, ma appartiene ad una classe di
funzioni molto particolari dette distribuzioni, che non tratteremo. La equazione ṗ = δ che
abbiamo appena scritto non ha senso in τ = 0: chi sarà mai quella funzione p la cui derivata
fornisce δ? Per rispondere in modo corretto a questa domanda si dovrebbe modificare il concetto
di derivata; senza entrare nei dettagli, ci accontentiamo di dare un senso alla ṗ = δ per il tramite
dell’integrale che compare nella (142)
La (142)2 vale anche al limite per ε che tende a zero, e fornisce:
p(0+ ) − p(0− ) = 1 .
(143)
Abbiamo dunque scoperto che una forza impulsiva in τ = 0 provoca un salto della quantità di
moto dal valore che aveva subito a sinistra di τ = 0, indicato con p(0− ), al nuovo valore assunto
subito a destra di τ = 0, indicato con p(0+ ); poichè per valori positivi di τ la forza impulsiva è
nulla, il sistema manterrà constante nel tempo la nuova quantità di moto acquisita con l’impulso.
Allora, il problema
ṗ(τ ) = δ(τ ) , ∀t ∈ T , p(0− ) = 0 ,
(144)
ha come soluzione
1
= cost .
(145)
m
Le precedenti considerazioni mostrano che i due seguenti problemi sono equivalenti, nel senso
che hanno la stessa soluzione:
p(0+ ) = 1 ,
ṗ(τ ) = δ(τ ) , ∀t ∈ T ,
⇒
v(τ ) =
p(0− ) = 0 , forzante pari a δ e condizione iniziale omogenea;
(146)
ṗ(τ ) = 0 , ∀t ∈ T ,
p(0) = 1 ,
forzante nulla e condizione iniziale unitaria;
32
L’equivalenza dei problemi (146) ha i suoi vantaggi: se oltre all’impulso agisce anche una forzante
generica f (τ ), possiamo riscrivere la (142) nel seguente modo
Z ε
Z ε
Z ε
ṗ(τ ) = δ(τ ) + f (τ ) , ∀t ∈ T , ⇒
ṗ(τ ) dτ = p(ε) − p(−ε) =
δ(τ ) dτ +
f (τ ) dτ = 1 .
−ε
ε
ε
(147)
Infatti, essendo la f (τ ) una funzione regolare, il suo integrale tra −ε e ε svanisce al tendere a
zero di ε. Allora, come prima, i due problemi seguenti sono equivalenti:
ṗ(τ ) = δ(τ ) + f (τ ) , ∀t ∈ T ,
ṗ(τ ) = f (τ ) , ∀t ∈ T ,
p(0− ) = 0 , forzante pari a δ + f e condizione omogenea;
p(0) = 1 ,
forzante pari a f e condizione unitaria;
(148)
4.9
La Risposta all’Impulso dell’Oscillatore
La risposta all’impulso è una nozione molto importante della meccanica delle vibrazioni. Consideriamo un oscillatore soggetto ad una forzante impulsiva; l’equazione di bilancio dell’oscillatore
semplice è la seguente
∀τ ∈ T .
m ẍ(τ ) + c ẋ(τ ) + k x(τ ) = δ(τ ) ,
(149)
Possiamo procedere come in (147), ossia, pensando al termine c ẋ(τ ) + k x(τ ) come una ulteriore
forza che si aggiunge al problema: integriamo tutti i termini tra −ε e ε
Z ε
Z ε
Z ε
Z ε
m ẍ(τ ) dτ +
c ẋ(τ ) dτ +
k x(τ ) dτ =
δ(τ ) dτ = 1 .
(150)
−ε
−ε
−ε
−ε
Svolgendo il primo ed il secondo integrale si ottiene poi
Z
ε
m [ ẋ(ε) − ẋ(−ε) ] + c [ x(ε) − x(−ε) ] +
k x(τ ) dτ = 1 .
(151)
−ε
Nel limite per ε che va zero, poichè x(τ ) è una funzione continua, il secondo e terzo addendo del
termine di sinistra scompaiono, e si ritrova il risultato dell’esempio già discusso precedentemente.
Dunque, il problema in cui la forza impulsiva compare come forzante e le condizioni iniziali sono
omogenee:
m ẍ(τ ) + c ẋ(τ ) + k x(τ ) = δ(τ ) , x(0) = 0 , ẋ(0) = 0 ,
(152)
è equivalente al problema in cui la forzante è nulla e la condizione sulla velocità iniziale è non
omogenea:
1
(153)
m ẍ(τ ) + c ẋ(τ ) + k x(τ ) = 0 , x(0) = 0 , ẋ(0) =
,
m
La risposta all’impulso, indicata con g(τ ) e chiamata anche funzione di Green a ricordo del
matematico G. Green, è dunque la soluzione dell’equazione omogenea con particolari condizioni
iniziali. Nel caso di sistema smorzato, 0 < ζ < 1, abbiamo:
vo + xo ζ ω
xom (τ ) = exp(−ζ ω τ ) xo cos(ωd τ ) +
sin(ωd τ ) ,
(154)
ωd
p
dove ωd = ω (1 − ζ 2 ); dunque, ponendo xo = 0, vo = 1/m, abbiamo la risposta all’impulso,
valida per τ > 0:
g(τ ) =
1
ω
exp(−ζ ω τ ) sin(ωd τ ) = p
exp(−ζ ω τ ) sin(ωd τ ) .
m ωd
k (1 − ζ 2 )
33
(155)
Scrivendo il bilancio delle forze in forma compatta, (28), possiamo dire che la risposta all’impulso
è la soluzione del seguente problema
∀τ ∈ T ,
L g(τ ) = δ(τ ) ,
x(0) = 0 ,
ẋ(0) = 0 .
(156)
2
kg
δ
1
kg,δ
0
−1
−2
−1
0
1
2
3
4
5
6
7
8
9
10
τ
Figura 12: Risposta dell’oscillatore (blu) all’impulso (rosso); ζ = 0.1, ω = 2. La risposta tende
asintoticamente al valore a riposo x = 0.
4.10
La Funzione Gradino
La funzione gradino, indicata con h e chiamata anche funzione di Heaviside a ricordo dell’ingegnere O. Heaviside, è definita dalla
0, τ < 0;
h(τ ) =
(157)
1, τ > 0.
Anche questa funzione è molto particolare, costante ovunque tranne che in un punto, dove
subisce un salto. La funzione gradino può essere definita a partire dall’impulso nel seguente
modo:
Z τ
h(τ ) =
δ(s) ds .
(158)
−∞
Abbiamo già visto una equazione del tipo (158): si tratta della (142) che è stata usata per dare
un senso alla primitiva della funzione δ. Possiamo allora dire che il gradino h è la primitiva
dell’impulso δ:
ḣ(τ ) = δ(τ ) .
(159)
Il gradino h(τ ) può essere traslato in punti diversi dall’origine considerando la funzione composta
h(τ − τ̄ ) che avrà il salto in τ = τ̄ .
Possiamo utilizzare la funzione gradino per introdurre un salto in una generica funzione continua:
data f (τ ), la funzione f (τ ) h(τ − τ̄ ) agisce nel seguente modo:
0,
τ < τ̄ ;
f (τ ) h(τ − τ̄ ) =
(160)
f (τ ) , τ > τ̄ .
34
h(τ )
h(τ − τ̄ )
τ
τ̄
τ
Figura 13: La funzione h(τ ) salta in τ = 0 da zero ad uno (sinistra); la funzione h(τ − τ̄ ) ha il
salto in τ = τ̄ (destra).
4.11
La Risposta al Gradino dell’Oscillatore
Possiamo utilizzare la risposta all’impulso g(τ ) già trovata, vedi (155), per ottenere senza troppa
fatica la risposta dell’oscillatore soggetto ad una forzante a gradino. Ripartiamo dalla (156)1 :
L g(τ ) = δ(τ ) ,
∀τ ∈ T ;
(161)
integrando entrambe i termini tra −∞ e τ , e ricordando la (158), abbiamo
Z τ
Z τ
L g(s) ds =
δ(s) ds = h(τ ) , ∀τ ∈ T .
−∞
(162)
−∞
L’operatore L e l’integrazione commutano; allora
Z τ
Z τ
L g(s) ds = L
g(s) ds = h(τ ) ,
−∞
∀τ ∈ T .
(163)
−∞
Dunque, il problema L con forzante a gradino, ha come soluzione l’integrale della funzione g;
indicando con s(τ ) tale soluzione e ricordando che g(s) ha senso solo per τ > 0, possiamo
scrivere:
Z τ
Z τ
s(τ ) =
g(s) ds =
g(s) ds
−∞
=
0
(164)
1
ζω
1 − e−ζ ω τ cos(ωd τ ) +
sin(ωd τ )
.
k
ωd
Scrivendo il bilancio delle forze in forma compatta, (28), possiamo dire che la risposta al gradino
è la soluzione del seguente problema
L s(τ ) = h(τ ) ,
∀τ ∈ T ,
x(0) = 0 ,
ẋ(0) = 0 .
(165)
Osservazione. Le due soluzioni g(τ ) e s(τ ) hanno valore solo per τ > 0; possiamo esprimere
in modo sintetico questo fatto utilizzando la proprietà (160) per ridefinire le due soluzioni come
segue:
"
#
ω
1
p
exp(−ζ ω τ ) sin(ωd τ ) h(τ ) ,
g(τ ) =
k
(1 − ζ 2 )
(166)
1
ζω
s(τ ) =
1 − e−ζ ωd τ cos(ωd τ ) +
sin(ωd τ )
h(τ ) .
k
ωd
35
2
kg,ks,h
1
0
ks
h
kg
−1
−2
−1
0
1
2
3
4
5
6
7
8
9
10
τ
Figura 14: Risposta dell’oscillatore (blu) al gradino (rosso); ζ = 0.1, ω = 2. La risposta tende
asintoticamente al valore x = 1, corrispondente ad una forzante stazionaria. La linea tratteggiata
mostra la risposta all’impulso riportata nella figura precedente; confrontando le due risposte si
nota che l’impulso provoca oscillazioni molto più ampie.
4.11.1
Esempio: gradino rettangolare
La nozione di risposta al gradino permette di ricavare in modo semplice la risposta ad una
forzante ‘rettangolare’ indicata con r(τ ), somma di due gradini, uno opposto all’altro e sfalsati
nel tempo
r(τ ) = ro [ h(τ + τ̄ ) − h(τ − τ̄ ) ]
(167)
Poiché il sistema è lineare, la risposta sarà data dalla somma delle singole risposte al gradino;
utilizzando la (166) si ottiene in modo immediato
x(τ ) = ro [ s(τ + τ̄ ) − s(τ − τ̄ ) ]
ro
(−ζ
ω
(τ
+τ̄
))
d
=
1−e
cos(ωd (τ + τ̄ )) +
k
ro
(−ζ
ω
(τ
−τ̄
))
d
−
1−e
cos(ωd (τ − τ̄ )) +
k
ζω
sin(ωd (τ + τ̄ ))
ωd
ζω
sin(ωd (τ − τ̄ ))
ωd
h(τ + τ̄ )
(168)
h(τ − τ̄ ) .
La Fig.(14) mostra la risposta di un oscillatore non smorzato (nero) al ‘rettangolo’ r(τ ) (campitura grigia), calcolata con i seguenti valori dei parametri ζ = 0, ω = 3, τ̄ = 2. La funzione r(τ )
è la somma del gradino positivo in τ = −τ̄ (rosso) e di quello negativo in τ = τ̄ (blu). Quando
la forzante torna a zero, la risposta diventa armonica attorno al valore x = 0.
4.12
L’integrale di convoluzione
Data una forzante generica f (τ ), definita per τ > 0, costruiamo la seguente funzione, prodotto
di un impulso posto in τ = s e della funzione data valuta in s:
f (s) δ(τ − s) .
(169)
Data la proprietà dell’impulso (139), la funzione appena definita verifica la seguente equazione
Z τ
f (s) δ(τ − s) ds = f (τ ) ;
(170)
0
36
2
1
kx
0
−1
−2
−τ̄
τ̄
0
2 τ̄
τ
Figura 15: Risposta dell’oscillatore non smorzato (nero) al ‘rettangolo’ r(τ ) (campitura grigia);
ζ = 0., ω = 3, τ̄ = 2. La funzione r(τ ) è la somma del gradino positivo in τ = −τ̄ (rosso) e di
quello negativo in τ = τ̄ (blu). Quando la forzante torna a zero, la risposta diventa armonica
attorno al valore x = 0.
l’integrale che compare nella precedente equazione è detto integrale di convoluzione e ammette
la seguente interpretazione: la funzione f (τ ) è rappresentata come una somma di infiniti termini
(l’integrale) di impulsi che in ogni punto s hanno il valore f (s).
Sapendo che la risposta all’impulso è descritta dalla funzione di Green g e che l’operatore
di bilancio è lineare, utilizziamo di nuovo il bilancio delle forze scritto in forma compatta, vedi
(28), per formulare il seguente problema
L f (s) g(τ − s) = f (s) δ(τ − s) ,
∀τ > 0 ,
x(0) = 0 ,
ẋ(0) = 0 .
(171)
Integrando entrambe i termini tra 0 e τ e ricordando che l’operatore L e l’integrazione commutano, abbiamo
Z τ
Z τ
Z τ
L f (s) g(τ − s) ds = L
f (s) g(τ − s) ds =
f (s) δ(τ − s) = f (τ ) , ∀τ > 0 . (172)
0
0
0
La relazione appena trovata dice che la soluzione x(τ ) del problema con forzante qualsiasi f (τ )
e condizioni iniziali omogenee è dato dall’integrale di convoluzione della forzante per la
funzione di Green: riassumendo, abbiamo
Z τ
IN: f (τ ) & x(0) = 0 , ẋ(0) = 0 . ⇒ OUT: x(τ ) =
f (s) g(τ − s) ds .
(173)
0
La traslazione τ − s che compare nell’integrale di convoluzione può essere fatta su uno dei due
prodotti senza alterare il risultato; possiamo allora scrivere
Z τ
Z τ
x(τ ) =
f (s) g(τ − s) ds =
f (τ − s) g(s) ds , τ > 0 .
(174)
0
0
Gli integrali di convoluzione non sempre sono semplici da calcolare; la scelta di traslare la forzante
oppure la funzione di Green viene fatta in base considerazioni di convenienza computazionale.
37
Nel caso dell’oscillatore, la risposta all’impulso è rappresentata dalla (166)1 ; dunque, la
risposta alla forzante generica f (τ ), con condizioni iniziali omogenee, sarà data dalla
Z τ
Z τ
ω
f (s) g(τ − s) ds = p
f (τ ) exp[−ζ ω (τ − s)] sin[ωd (τ − s)] ds ; (175)
x(τ ) =
k (1 − ζ 2 ) 0
0
si ricordi che la funzione x(τ ) è definita solo per τ > 0.
4.12.1
Esempio: convoluzione armonica
Usiamo la tecnica dell’integrale di convoluzione per calcolare la risposta dell’oscillatore non
smorzato ad una forzante nulla per τ < 0 ed armonica per τ > 0, del tipo
f (τ ) = k A sin(α τ ) h(τ ) .
(176)
Inserendo la (176) nella (175) e ponendo ζ = 0, abbiamo
Z τ
x(τ ) = A ω
sin(α s) sin[ω (τ − s)] ds .
(177)
0
Il prodotto tra funzioni armoniche sotto integrale può essere trasformato utilizzando la seguente
relazione trigonometrica
sin(u) sin(v) =
cos(u − v) − cos(u + v)
;
2
(178)
si ottiene dunque, dopo alcune manipolazioni
x(τ ) =
A
[ sin(α τ ) − β sin(ω τ ) ] h(τ ) ;
1 − β2
(179)
si noti il gradino h(τ ) che compare al termine della precedente espressione: in questo modo
viene reso esplicito il fatto che tale risposta è nulla per τ < 0. Usando la soluzione con forzante
armonica (87) trovata per altra via, supponendo φ3 (0, β) = 0, abbiamo
xg (τ ) = xom (τ ) + xf (τ ) = a cos(ω τ ) + b sin(ω τ ) +
A
sin(α τ )
1 − β2
(180)
Le due costanti a e b si trovano per il tramite delle condizioni iniziali
xg (0) = a ,
ẋg (0) = b ω +
Aα
1 − β2
⇒
a = 0,
b=
Aαω
.
α2 − ω 2
(181)
Inserendo i valori delle costanti nella soluzione generale xg si trova lo stesso risultato riportato
nella (179) a meno della funzione gradino.
4.13
Forzanti notevoli: la mezza-armonica e l’urto
Può accadere che le strutture siano soggette a carichi molto elevati, che agiscono per intervalli
di tempo molto brevi rispetto al periodo naturale della struttura. Qui analizziamo due forzanti
di questo tipo, la mezza-armonica e l’urto (DA COMPLETARE).
38
4.13.1
Mezza armonica
Una forza di breve durata, detta shock in inglese, può essere caratterizzata dal massimo valore
che raggiunge, dalla durata Ts e dal suo andamento temporale. Una rappresentazione esplicita
di tale evento molto usata è la funzione seno troncata al primo mezzo periodo, ossia, la funzione
f (τ ) = k A [ sin(αs τ ) h(τ ) + sin(αs (τ − Ts )) h(τ − Ts ) ] ,
αs =
π
;
Ts
(182)
attenzione: Ts non è il periodo della funzione seno, ma la sua metà, ossia, la durata di mezza
oscillazione. La (179) fornisce la risposta ad una forzante armonica con il gradino; poiché il
2
f (τ )/(k A)
sin(αs τ ) h(τ )
sin(αs (τ − Ts )) h(τ − Ts )
1
f
kA
0
−1
−2
0
Ts
2 Ts
3 Ts
4 Ts
5 Ts
6 Ts
τ
Figura 16: La funzione mezza armonica (nera) è ottenuta sommando un seno-gradino (magenta)
con un altro seno-gradino traslato di Ts (tratteggiato). αs = 3, Ts = π/3
sistema è lineare, la risposta all’ingresso (182) sarà data da
A [
sin(α
τ
)
−
β
sin(ω
τ
)
]
h(τ
)
+
[
sin(α
(τ
−
T
))
−
β
sin(ω
(τ
−
T
))
]
h(τ
−
T
)
,
s
s
s
s
s
s
s
1 − βs2
(183)
con βs = αs /ω. Cerchiamo ora il massimo della risposta, assumendo che esso si verifichi durante
il periodo di tempo in cui agisce la forzante, ossia, per τ ∈ (0, Ts ); consideriamo dunque solo
il coefficiente di h(τ ) che compare nella (183) e cerchiamo gli zeri della sua derivata rispetto al
tempo
d
[ sin(αs τ ) − βs sin(ω τ ) ] = αs [ cos(αs τ ) − cos(ω τ ) ] = 0 .
(184)
dτ
La relazione trigonometrica
u+v
u−v
cos(u) − cos(v) = −2 sin
sin
(185)
2
2
x(τ ) =
permette di riscrivere la (184) in una forma più agevole per la ricerca degli zeri
ω+α
ω−α
cos(αs τ ) − cos(ω τ ) = 2 sin
τ sin
τ = 0.
2
2
39
(186)
Tale espressione si annulla in un numero infinito di istanti, ma la condizione τ1,2 ∈ (0, Ts ) pone
un limite superiore agli istanti da considerare
i2π
1
1
τ1,2 =
1±
;
(187)
, i = 1, 2, . . . & τ1,2 ∈ (0, Ts ) ⇒ i =<
ω±α
2
βs
in questi istanti la (183) assume i valori
A
x1,2 (τ1,2 ) =
sin
1 ∓ βs
i 2 π βs
1 ± βs
,
1
i =<
2
1
1±
βs
.
(188)
Esaminando la precedente relazione risulta che il massimo si ha negli istanti τ1 e vale
A
i 2 π βs
1
1
xmax =
sin
, i =<
1±
.
1 − βs
1 + βs
2
βs
x
A
1.5
Β�0.1
1.0
Β�0.2
0.5
�10
Β�0.3
10
20
30
40
50
Τ
Β�0.4
�0.5
Figura 17: Risposta alla mezza armonica per vari valori di βs , con ω = 1.
40
(189)