U NIVERSITÀ DEL S ALENTO
FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI
Corso di Laurea in Fisica
L E Z I O N I S U L L A D I N A M I C A D I AT M O S F E R A E O C E A N I
Piero Lionello
Dipartimento di Scienze dei Materiali
Anno Accademico 2010/2011
INDICE
I
ELEMENTI DI FLUIDODINAMICA
Introduzione
1
1.4
1.5
1.6
2.2
2.3
2.4
2.5
2.6
2.7
2.8
5
27
Le equazioni in coordinate geografiche
Sistemi di riferimento cartesiani
28
Moti quasi-piani
29
Il bilancio geostrofico
31
Le coordinate isobariche
31
Il vento termico
32
Modello a due strati
33
3.7.1 Il modo baroclino
35
19
37
Onde di gravità
38
Onde di Poincarè–Sverdrup
40
Onde di Kelvin
41
Onde di Rossby
42
4.4.1 Dinamica dell’onda di Rossby
27
ONDE LINEARI
4.1
4.2
4.3
4.4
II
15
Le forze nei fluidi
15
2.1.1 Il tensore degli sforzi
15
2.1.2 La pressione
17
L’equazione del moto
18
Sistemi di riferimento non inerziali
L’equazione di Navier-Stokes
20
La vorticità
21
L’integrale di Bernoulli
22
Il teorema di Kelvin
23
La vorticità potenziale
24
MOTI A GRANDE SCAL A
3.1
3.2
3.3
3.4
3.5
3.6
3.7
4
5
Coordinate ed operatori vettoriali
5
Le coordinate geografiche
7
Coordinate Lagrangiane ed Euleriane
8
1.3.1 Esempi
8
Variazioni di volumi e lunghezze
9
Funzione di flusso e linee di flusso
10
Divergenza, deformazioni e vorticità
11
DINAMICA
2.1
3
3
C I N E M AT I C A
1.1
1.2
1.3
2
1
MODELLISTICA NUMERICA
43
45
47
Premessa: metodo alle differenze finite
INTEGRAZIONE NUMERICA DI PDE
5.1
47
i
Indice
5.2
5.3
5.4
5.5
5.6
5.7
5.8
ii
Onde in una dimensione
48
5.2.1 Schemi di integrazione espliciti
49
5.2.2 Dispersione numerica
51
Metodi impliciti
51
Equazione di diffusione
52
5.4.1 Schema FTCS
52
5.4.2 Schemi impliciti di integrazione
52
5.4.3 Onde in presenza di diffusione
53
Staggering e griglie multidimensionali
53
5.5.1 Equazioni shallow-water monodimensionali
54
5.5.2 Onde in griglie multidimensionali
54
5.5.3 Diffusione in griglie multidimensionali
55
5.5.4 Equazioni di shallow-water, forza di Coriolis e griglie di Arakawa
55
Boundary value problems
56
Metodo spettrale
58
Metodo agli elementi finiti
58
Parte I
ELEMENTI DI FLUIDODINAMICA
INTRODUZIONE
Vi sono alcuni comportamenti che caratterizzano i fluidi in contrapposizione ai solidi.
Mentre i solidi hanno una forma propria, i fluidi si adattano senza opporre resistenza
a variazioni della forma del recipiente in cui sono contenuti, ma è necessario esercitare
una forza per variare il volume da essi occupato. È sempre possibile mescolare un fluido,
ossia modificare la posizione di alcuni suoi elementi rispetto agli altri inducendovi un
moto continuo di scorrimenti e vortici, che diminuisce con la viscosità del fluido, ma
non si annulla per quanto piccola sia la forza applicata. Quando viene esercitata una
forza che tende a deformare un solido, esso oppone una resistenza proporzionale alla
deformazione che pertanto aumenta fino al valore per cui la resistenza eguaglia la forza
applicata, ed una condizione di equilibrio viene conseguita. Quando viene esercitata
una forza che induce uno scorrimento di uno strato di fluido rispetto ad un altro, un
fluido oppone una resistenza che è proporzionale alla velocità dello scorrimento stesso
che, quindi, continua indefinitamente col valore della velocità a cui la resistenza eguaglia la forza applicata. Pertanto non esiste un meccanismo in grado di interrompere il
moto prodotto dalla forza, per quanto piccola essa sia, e non viene raggiunto l’equilibrio.
Al contrario, se sottoposto ad una forza che tende a variarne il volume, ad esempio una
compressione isotropa, un fluido reagisce con una forza proporzionale alla variazione
stessa e viene raggiunta una condizione di equilibrio dove la differenza rispetto al volume iniziale è proporzionale alla forza applicata. In conclusione sono fluidi le sostanze
che non possono sostenere senza deformarsi una sollecitazione che ne lasci inalterato il
volume. Questo criterio non è privo di ambiguità, ed esistono sostanze, quali il vetro
ed il catrame, che hanno comportamenti duplici, e, a seconda dell’intensità degli sforzi
a cui sono sottoposte e delle scale dei tempi considerati, si comportano come solidi o
fluidi.
Durante il moto, mentre in un solido, in assenza di rotture, le variazioni delle distanze
geometriche tra i vari elementi sono piccole, in un fluido esse sono enormi. Ne segue
che la cinematica dei fluidi è molto più complessa di quella dei solidi. I gradi di libertà di
un solido, nel caso limite che si comporti come un corpo rigido, si possono ridurre a 6, e
sono comunque in numero finito, mentre quelli di un fluido sono formalmente infiniti
ed il suo moto viene descritto in modo completo solo specificando punto per punto le
velocità locali di espansione–contrazione e rotazione.
Le diverse caratteristiche di fluidi e solidi conseguono da differenze strutturali: i solidi hanno una struttura cristallina, per cui le loro molecole rispondono in modo unitario
alle sollecitazioni, mentre i legami fra le molecole dei fluidi sono deboli e non permanenti (nei liquidi) o assenti (nei gas). Tipicamente il potenziale fra due molecole biatomiche ha un minimo ad una distanza d 0 di circa 10−10 m = 1 Å. A distanze inferiori la
forza è repulsiva, se le molecole non si combinano chimicamente, per effetto della forza elettrica–quantistica esercitata fra i nuclei, mentre a distanze superiori è attrattiva per
effetto delle fluttuazioni statistiche delle distribuzioni di carica fra gli atomi. Nei solidi la
distanza di separazione tra le molecole è d 0 , mentre nei liquidi è di poco superiore e nei
3
Indice
gas è nell’ordine di 10d 0 nelle abituali condizioni di pressione e temperatura. Le forze
intermolecolari sono quindi molto intense nei solidi, dove l’agitazione termica delle molecole non consente loro di spostarsi in modo apprezzabile dalla posizione di equilibrio
attorno alla quale oscillano. Nei liquidi le forze sono più deboli, non vi sono permanenti gruppi di molecole parzialmente legate fra loro, e le distanze intermolecolari variano
nell’ordine di d 0 per effetto dell’agitazione termica. Nei gas le forze intermolecolari agiscono solo durante le collisioni fra molecole, che altrimenti si muovono liberamente ed
in modo disordinato. La libertà di movimento delle molecole, che consegue dall’assenza
di una struttura cristallina, rigida e ordinata, è la caratteristica microscopica (comune a
gas e liquidi) che contraddistingue i fluidi.
L’obiettivo della fluidodinamica è la descrizione del moto relativo di porzioni od elementi di fluido sotto l’azione delle forze presenti, attuata ignorando completamente la
struttura corpuscolare della materia, ed, invece, introducendo delle variabili macroscopiche quali velocità e densità come funzioni continue dello spazio e del tempo. Non esiste
una “prova” che questa, introdotta come ipotesi del continuo, sia una descrizione “corretta” della realtà. L’ipotesi del continuo è in accordo con la nostra percezione sensoriale
della realtà ed è operativamente giustificata dal suo successo nel descrivere il moto dei
fluidi. Essa è tuttavia falsa poiché la struttura di tutta la materia, e quindi anche dei
fluidi, è corpuscolare. La massa è concentrata nei nuclei degli atomi e le molecole si
muovono disordinatamente per effetto dell’agitazione termica. Dal punto di vista microscopico, sia densità che velocità non sono affatto funzioni regolari e continue. L’ipotesi del continuo è valida per il moto di un fluido se esso coinvolge un intervallo di scale
spaziali che verificano simultaneamente due proprietà:
• sono sufficientemente grandi da contenere un numero di molecole sufficiente a
rendere piccole le varianze dei valori medi di energia, quantità di moto, e massa
totale;
• sono sufficientemente piccole da poter essere considerate locali dal punto di vista
macroscopico.
Questi requisiti sono soddisfatti da una vastissima classe di moti. Un esempio è fornito
dalla densità. La densità di un fluido dipende dal numero di molecole contenute nel volume considerato. Se il volume è estremamente piccolo, le molecole in esso contenute
sono poche e le fluttuazioni del loro numero dovute al moto sono significative nel calcolo della densità. Se il volume aumenta le fluttuazioni smettono di essere significative e la
valutazione della densità non dipende dal volume. Se il volume aumenta ulteriormente
vengono inglobate parti del fluido che hanno proprietà diverse e la densità diventa di
nuovo dipendente dalla scelta del volume. Il volume richiesto per contenere un enorme
numero di molecole è sorprendentemente piccolo. Si consideri un gas: in un cubo di
³
´3
lato D sono contenute N = 10Dd0 molecole. Quindi, in un cubo di 10−5 m di lato sono
contenute 1012 molecole, numero che spiega la validità dell’ipotesi del continuo.
4
1
C I N E M AT I C A
1.1
C O O R D I N AT E E D O P E R AT O R I V E T T O R I A L I
La posizione di ogni elemento di un fluido viene specificata in relazione ad un prefissato
sistema di coordinate. Questo, in generale, viene definito introducendo tre famiglie di
superfici nello spazio tridimensionale. A ciascuna famiglia è associata una coordinata il
cui valore denota una superficie, in modo che il vettore xc = (x 1c , x 2c , x 3c ), selezionando tre
superfici, una per ciascuna famiglia, identifichi il punto dello spazio tridimensionale che
ne costituisce l’intersezione. Quando le superfici sono piane e mutuamente ortogonali
le coordinate x = (x 1 , x 2 , x 3 ) si dicono cartesiane ortogonali, ma in generale è sufficiente
definire una tripletta di funzioni x 1c (x 1 , x 2 , x 3 ), x 2c (x 1 , x 2 , x 3 ), x 3c (x 1 , x 2 , x 3 ), ciascuna delle
quali rappresenta una superficie nello spazio tridimensionale, il cui jacobiano
¯
¯
¡ c ¢ ¯¯ ∂x i ¯¯
J x, x = ¯ c ¯
(1.1)
¯ ∂x ¯
j
sia non nullo, J (x, xc ) 6= 0, perché si possa definire un sistema di coordinate curvilinee ed
una trasformazione biunivoca dalle coordinate cartesiane a quelle curvilinee.
Se i versori, la cui direzione varia nello spazio, che identificano localmente le direzioni
del sistema di coordinate curvilinee sono mutuamente ortogonali, le coordinate vengono dette curvilinee ortogonali. Le coordinate non hanno necessariamente le dimensioni
di lunghezze fisiche, le quali sono ad esse legate da un fattore metrico h i , ossia
Ã
!2
3
X
∂x
j
ds i = h i dx ic ,
h i2 =
,
(1.2)
c
j =1 ∂x i
dove ds i è la lunghezza infinitesima di un arco ottenuto variando di dx ic la coordinata
x ic e lasciando invariate le altre due. Il volume dV = dx 1 dx 2 dx 3 , in coordinate curvilinee
ortogonali diventa
dV =
3
Y
i =1
h i dx ic .
(1.3)
Nel formulare le leggi della fisica vengono utilizzati tre operatori: gradiente, divergenza e rotore. L’operatore gradiente applicato ad uno scalare produce un vettore che
verifica la proprietà:
grad (θ) · ∆x
= 1,
∆x→0
∆θ
lim
(1.4)
dove ∆x rappresenta uno spostamento infinitesimo. L’operatore divergenza applicato
ad un vettore produce uno scalare tale che
div (u) = lim
∆V →0
dΦ(u)
,
∆V
(1.5)
5
C I N E M AT I C A
dove dΦ(u), rappresenta il flusso di u attraverso la superficie dell’elemento infinitesimo
di volume ∆V . L’operatore rotore applicato ad un vettore produce un vettore tale che
rot (u) · Ŝ = lim
dC (u)
dS→0 dΦ(u)
,
(1.6)
dove dC (u) rappresenta la circuitazione di u lungo il contorno della superficie infinitesima dS con versore normale Ŝ e dΦ(u) il flusso di u attraverso di essa. Il div (grad (θ))
definisce un altro operatore di uso comune chiamato laplaciano.
È consuetudine rappresentare tali operatori mediante il simbolo ∇:
grad θ ≡ ∇θ,
div u ≡ ∇ · u,
rot u ≡ ∇ × u,
div grad θ ≡ ∇2 θ;
questa notazione non è ambigua ed è perfettamente accettabile, ma non deve nascondere il fatto che si tratta di tre operatori ben distinti la cui espressione dipende dal sistema
di coordinate utilizzato. In coordinate ortogonali curvilinee si ha:
3 1 ∂θ
X
c
c x̂i ,
h
∂x
i =1 i
·i
¸
1
∂u 1 h 2 h 3 ∂h 1 u 2 h 3 ∂h 1 h 2 u 3
,
∇·u =
+
+
h1 h2 h3
∂x 1c
∂x 2c
∂x 3c
¯
¯
¯ h x̂c h x̂c h x̂c ¯
2 2
3 3¯
¯ 1 1
¯
¯
∂x2c
∂x3c ¯ ,
∇ × u = ¯ ∂x1c
¯
¯
¯h 1 u 1 h 2 u 2 h 3 u 3 ¯
µ
¶
µ
¶
µ
¶¸
·
∂ h 1 h 3 ∂θ
∂ h 1 h 2 ∂θ
1
∂ h 2 h 3 ∂θ
+
+
.
∇2 θ =
h 1 h 2 h 3 ∂x 1c h 1 ∂x 1c
∂x 2c h 2 ∂x 2c
∂x 3c h 3 ∂x 3c
∇θ =
(1.7)
Solamente per sistemi cartesiani ortogonali, per cui ovviamente h 1 = h 2 = h 3 = 1, si può
formalmente identificare ∇ con il vettore
µ
¶
∂
∂
∂
∇=
,
,
∂x 1 ∂x 2 ∂x 3
ed eseguire con esso le operazioni vettoriali mantenendo sempre l’analogia formale.
Alcune utili identità vettoriali si possono derivare dalle proprietà degli operatori:
= 0,
(1.8a)
∇ · ∇ × u = 0,
(1.8b)
∇ × ∇θ
∇ · θu = ∇θ · u + θ∇ · u,
(1.8c)
∇ · u × v = v · ∇ × u − u · ∇ × v,
(1.8d)
∇ × θu = ∇θ × u + θ∇ × u,
(1.8e)
∇ × (u × v) = u(∇ · v) − v(∇ · u) + (v · ∇)u − (u · ∇)v.
(1.8f)
Esse saranno richiamate, assieme alle proprietà degli operatori gradiente, divergenza e
rotore, nella derivazione delle equazioni in fluidodinamica.
In forma integrale, le proprietà dell’eq. (1.5) e dell’eq. (1.6) si traducono nei teoremi
di Gauss e di Stokes, rispettivamente:
Z
Z
∇ · u dV = u · dS,
(1.9)
V
6
S
1.2 L E C O O R D I N AT E G E O G R A F I C H E
(dove il primo membro rappresenta un integrale di volume ed il secondo un integrale
sulla superficie S che racchiude V , ossia il flusso di u attraverso S), e
Z
I
(1.10)
u · dl = ∇ × u · dS,
γ
S
(dove il primo membro rappresenta la circuitazione di u lungo la curva chiusa γ ed il
secondo membro rappresenta un integrale su una generica superficie S limitata dalla
curva γ).
1.2
L E C O O R D I N AT E G E O G R A F I C H E
Esistono molte scelte possibili di coordinate curvilinee, ed
esse possono, sia pure con un procedimento non banale,
essere opportunamente definite in modo da adattarsi alla
morfologia del dominio di integrazione delle equazioni ed
avere, nella loro versione discreta, risoluzioni spaziali diverse in diverse parti del dominio. Un sistema di coordinate
privilegiato per la descrizione dei moti su scala planetaria
sono le coordinate geografiche. Esse sono quasi equivalenti
alle coordinate sferiche di comune uso in molti argomenti
di fisica, ma ne differiscono perché la latitudine è definita
a partire dal piano equatoriale e non dall’asse polare. La loro importanza in geofisica necessita di una loro trattazione
dettagliata.
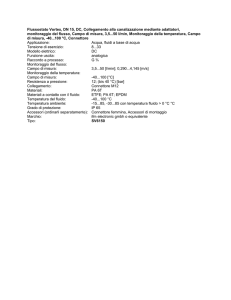
Le coordinate geografiche sono (λ, ϕ, r ), longitudine,
Figura 1: Coordinate geografiche.
latitudine e raggio rispettivamente, e sono legate alle
coordinate cartesiane dalle relazioni:
µ ¶
q
x2
x3
λ = arctan
,
ϕ = arctan q
r = x 12 + x 22 + x 32 ,
(1.11)
,
x1
x 12 + x 22
e
x 1 = r cos ϕ cos λ,
x 2 = r cos ϕ sin λ,
x 3 = r sin ϕ.
(1.12)
I fattori metrici sono h 1 = r cos ϕ, h 2 = r e h 3 = 1, in modo che dV = r 2 cos ϕdr dλdϕ.
In coordinate geografiche gli operatori gradiente, divergenza, rotore e laplaciano assumono la forma seguente:
1 ∂θ
∂θ
1 ∂θ
λ̂ +
ϕ̂ +
r̂
r cos ϕ ∂λ
r ∂ϕ
∂r
·
¸
¢ ∂ ¡
¢
1
∂
∂ ¡
∇·u =
r cos ϕu 2 +
r cos ϕr u 3
(r u 1 ) +
r cos ϕr ∂λ
∂ϕ
∂r
¯
¯
¯ r cos ϕλ̂ r ϕ̂ r̂ ¯
¯
¯
¯
¯
∇ × u = ¯ ∂λ
∂ϕ ∂r ¯
¯
¯
¯r cos ϕu 1 r u 2 u 3 ¯
µ
¶
µ
¶
1
∂2 θ
1
∂
∂θ
1 ∂
2
2 ∂θ
∇ θ= 2
+
cos ϕ
+ 2
r
.
r cos2 ϕ ∂λ2 r 2 cos ϕ ∂ϕ
∂ϕ
r ∂r
∂r
∇θ =
7
C I N E M AT I C A
1.3
C O O R D I N AT E L A G R A N G I A N E E D E U L E R I A N E
Vi sono due descrizioni del moto di un fluido, una lagrangiana ed una euleriana. Il punto di vista euleriano descrive il moto del fluido con variabili θ(x, t ) che restituiscono la
distribuzione spaziale ad ogni istante del moto, ossia il valore di θ nel punto x all’istante
t . Il punto di vista lagrangiano descrive il moto del fluido seguendone ogni elemento.
Le variabili θ(x0 , t 0 ) descrivono il valore di θ dell’elemento di fluido che ad un istante di riferimento t 0 si trovava nella posizione x0 . Le leggi della fisica, che ad esempio
descrivono la variazione di quantità di moto, temperatura, densità di un elemento di
fluido, si esprimono naturalmente nella descrizione lagrangiana. Il punto di vista euleriano fornisce invece una più immediata rappresentazione del moto del fluido, ed è
quello utilizzato più spesso per presentare osservazioni e costruire modelli numerici dei
fluidi ottenendo, ad esempio, mappe meteorologiche, immagini satellitari, mappe che
mostrano l’elevazione superficiale della superficie marina o correnti oceaniche.
La derivata lagrangiana Dθ
Dt , detta anche derivata comovente o derivata totale, esprime la variazione di θ per un dato elemento di fluido. L’elemento di fluido che occupava
al tempo t la posizione x con velocità u(x, t ) si trova all’istante t + ∆t nella posizione
x + ∆x, dove ∆x = u(x, t )∆t . Quindi
∆θ θ(x + ∆x, t + ∆t ) − θ(x, t )
=
∆t
∆t
θ(x + ∆x, t + ∆t ) − θ(x + ∆x, t ) + θ(x + ∆x, t ) − θ(x, t )
=
,
∆t
da cui, nel limite ∆t → 0,
Dθ
∂θ
= u · ∇θ +
,
Dt
∂t
(1.13)
dove è stata usata la proprietà del gradiente espressa dall’eq. (1.4). La relazione (1.13)
raccorda il punto di vista lagrangiano, Dθ
Dt , con il punto di vista euleriano, che osserva
l’evoluzione locale ∂θ
e
le
variazioni
spaziali
∇θ della stessa grandezza θ.
∂t
1.3.1 Esempi
Esempi di descrizioni lagrangiane ed euleriane possono essere identificate nelle tecniche osservative. Le tecniche che producono naturalmente dati in forma euleriana sono,
forse, più comuni, perché si basano sulla raccolta di dati forniti da un insieme di strumenti di rilevamento la cui collocazione è fissa nello spazio (come sensori collocati su
piattaforme oceanografiche od in stazioni meteorologiche) o dalla realizzazione di un
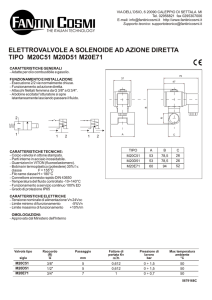
dispositivo che determini la distribuzione spaziale di un osservabile. Gli esempi più
diffusi sono gli strumenti fotografici o altri strumenti per telerilevamento, come radar
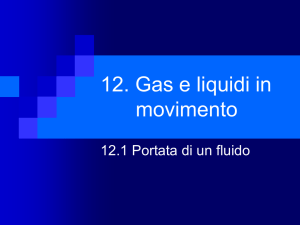
e radiometri. La fig. 2 mostra il campo di vento sopra la superficie del mare derivato
dai dati rilevati dallo scatterometro montato sul satellite ERS-2. Lo strumento fornisce
la visione complessiva ed istantanea del campo di vento consentendo la visualizzazione di un fronte che attraversa il Mare Tirreno e delle deformazioni del campo di vento
determinate dalla presenza delle isole.
8
1.4 V A R I A Z I O N I D I V O L U M I E L U N G H E Z Z E
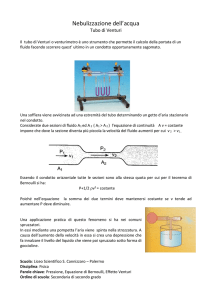
Misure di tipo lagrangiano richiedono l’utilizzo
di un dispositivo capace di muoversi assieme al
fluido, che, in applicazioni oceanografiche può essere costituito da apparati di misura la cui densità
media è stata portata a coincidere con quella del
fluido da analizzare. La figura 3 mostra il moto
oscillatorio dovuto ad un’onda a bassa frequenza,
osservata nell’oceano Atlantico. Ogni figura della sequenza mostra la traiettoria seguita dagli elementi del fluido durante una settimana (i dati sono
stati mediati per eliminare oscillazioni di frequenFigura 2: Campo di vento alle ore 9:24 za superiore che sono sovrapposte all’onda a bassa
del 18 novembre 1996 fornito dallo frequenza).
scatterometro installato su ERS-2. La
lunghezza delle frecce è proporzionale
al modulo della velocità del vento.
1.4
VA R I A Z I O N I D I V O L U M I E L U N G H E Z Z E I N
UN FLUIDO IN MOTO
Le relazioni che descrivono le variazioni nel tempo
del volume e della lunghezza di un elemento fluido
consentono di esprimere in forma differenziale le leggi fisiche. Queste relazioni vengono chiamate integrali materiali per sottolineare che si intendono applicate a porzioni
fissate di fluido, che si deformano e spostano durante il moto.
Ogni elemento δS della superficie che
delimita un elemento di volume δV si
sposta durante il moto con la velocità locale u del fluido, determinando una variazione di volume u · δS. Sommando su tutta la superficie dell’elemento di volume si
ottiene la variazione di un elemento di volume δV in termini di δΦ(u), flusso di u:
DδV
= δΦ(u) = δV (∇ · u),
Dt
Figura 3: Traiettorie seguite in un periodo di
(1.14)
dove è stata usata la proprietà espressa
circa 3 mesi da un insieme di boe rilasciate oridall’eq. (1.5) dell’operatore divergenza ∇ ·
ginariamente nella Corrente del Golfo, che conδΦ(u)
sente di visualizzare il moto della corrente e le u = limδV →0 δV .
sue fluttuazioni.
I due estremi di un elemento lineare δl
si muovono con diverse velocità che differiscono per la quantità δu = (δl · ∇)u, che
rappresenta, quindi, la velocità di variazione di δl:
Dδl
= (δl · ∇)u.
Dt
(1.15)
9
C I N E M AT I C A
Usando l’eq. (1.14), il tasso di variazione della massa di un elemento di fluido, DδM
Dt ,
risulta dal tasso di variazione della densità % e dalla divergenza del campo di velocità:
µ
¶
D%
DδM D(%δV )
=
=
+ %∇ · u δV .
(1.16)
Dt
Dt
Dt
In assenza di aumento o perdita di massa, la conservazione della massa,
esprime in forma differenziale,
D%
+ %∇ · u = 0,
Dt
DδM
Dt
= 0, si
(1.17)
equazione denominata equazione di continuità: essa esprime il bilancio di massa per
un elemento di volume che si muove con il fluido, secondo cui la variazione percentuale
di densità di un elemento di fluido è bilanciata dalla variazione percentuale di volume
D%
(punto di vista lagrangiano). Se il fluido è incompressibile, allora Dt = 0 e quindi
∇ · u = 0,
(1.18)
ossia il campo di velocità è indivergente. In presenza di una sorgente di massa S M per
D%
unità di volume si avrebbe DδM
Dt = S M δV e quindi Dt + %∇ · u = S M .
In base all’identità vettoriale (1.8c), l’eq. (1.17) si può riscrivere come
∂%
+ ∇ · (%u) = 0,
∂t
(1.19)
che esprime il bilancio per un elemento di volume fisso nello spazio fra la variazione
locale di densità e la divergenza del flusso di densità %u (punto di vista euleriano).
Le relazioni (1.13), (1.14), (1.15), (1.16) non esprimono leggi fisiche, ma conseguono
dalla sola descrizione cinematica dei fluidi, e consentono di formulare dei tassi di variazione lagrangiani in forma euleriana. Occorrono la fisica e la dinamica del fluido per
poter specificare i flussi non avvettivi e le funzioni sorgenti e, quindi, il valore dei tassi
di variazione lagrangiani, in modo da ottenere la forma differenziale delle leggi fisiche
adatta allo studio del moto dei fluidi.
1.5
FUNZIONE DI FLUSSO E LINEE DI FLUSSO
La linea di flusso è definita come una linea che è in ogni suo punto tangente alla velocità
u = (u, v, w) del fluido:
δl · u = δl |u| ⇔
δx
u
=
δy
v
=
δz
w,
(1.20)
dove δl = (δx, δy, δz) è un vettore infinitesimo localmente orientato come la linea di
flusso. Un tubo di flusso è costituito dall’insieme delle linee di flusso che ad un dato
istante passano per il contorno di una superficie fissata. Se il moto è stazionario, sia tubi
che linee di flusso sono costanti ed il percorso seguito da un elemento di fluido, detto
traiettoria, coincide con una linea di flusso.
La condizione espressa dall’eq. (1.18) è automaticamente soddisfatta se si definisce
un vettore Ψ, tale che
u = ∇×Ψ
10
1.6 D I V E R G E N Z A , D E F O R M A Z I O N I E V O R T I C I TÀ
perché si ha che ∇ · (∇ × Ψ) ≡ 0. Dalla definizione segue immediatamente che il flusso
di u attraverso una superficie coincide con la circuitazione di Ψ lungo la curva che la
delimita.
Se il moto è bidimensionale, ossia u = (u, v, 0), allora Ψ = (0, 0, ψ) e la funzione ψ
è detta funzione di flusso. Le isolinee di ψ sono linee di flusso, ossia sono tangenti alla
velocità e la loro densità indica la velocità del moto, essa consente di visualizzare il moto
del fluido. Valgono, infatti, le due proprietà seguenti.
1. Le isolinee di ψ sono tangenti alla velocità del fluido. Una curva lungo cui ψ è
costante soddisfa:
0 = δψ =
∂ψ
∂ψ
δx +
δy = −vδx + uδy
∂x
∂y
e quindi la condizione (1.20) è verificata.
2. Il flusso di della velocità fra due isolinee A e B di ψ è costante e vale ψ(B )−ψ(A). La
dimostrazione è immediata1 :
¶
Z Bµ
Z B
¡
¢
∂ψ
∂ψ
udy − vdx =
dx +
dy = ψ(B ) − ψ(A).
∂x
∂y
A
A
Come le linee di forza di un campo visualizzano la direzione e l’intensità della forza,
così le linee di flusso visualizzano l’intensità e la direzione della velocità del fluido. Il
grafico che risulta è costante solo se il moto è stazionario, nel qual caso ψ non dipende
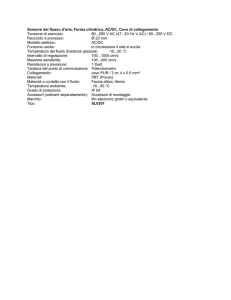
dal tempo. La fig. 4 rappresenta la quota a cui la pressione atmosferica vale 500 hPa,
corrispondente approssimativamente al livello che divide verticalmente l’atmosfera in
due parti di massa eguale. Nel regime dinamico caratteristico dell’atmosfera tale quota
è proporzionale alla funzione di flusso e le sue isolinee rappresentano la direzione e
l’intensità della circolazione atmosferica.
1.6
D I V E R G E N Z A , D E F O R M A Z I O N I E V O R T I C I TÀ
Localmente il moto di un fluido è costituito dalla somma di tre componenti con caratteristiche diverse: una rotazione, un’espansione/contrazione isotropa, una deformazione
isocora senza deformazioni di taglio. Il campo di velocità del fluido può sempre essere
decomposto in queste tre componenti, che possono essere presenti sia contemporaneamente che separatamente. Un moto viene detto irrotazionale se la rotazione è assente,
incompressibile se l’espansione/contrazione isotropa è assente.
L’analisi del campo di velocità di un fluido si ottiene da un’espansione locale della
velocità in funzione dello spazio. Al primo ordine, la velocità relativa ∆u di due elementi
di fluido separati da una distanza ∆x risulta2
∆u i = u i (x + ∆x) − u i (x) ≈
∂u i
∆x j ,
∂x j
(1.21)
1 Occorre tenere presente che, nel caso bidimensionale, il flusso è attraverso curve; in particolare, dato il seg¡
¢
mento orientato x 0 − x, y − y 0 , il flusso si ottiene moltiplicando scalarmente u per il vettore normale a tale
¡
¢
segmento e con lunghezza data dalla lunghezza del segmento, fornito dalla relazione n̂ = y 0 − y, −x 0 + x .
2 È sottintesa la somma sugli indici ripetuti.
11
C I N E M AT I C A
Figura 4: Linee di flusso della circolazione atmosferica. La figura mostra il la quota a
cui la pressione vale 500 hPa, detto geopotenziale a 500 hPa, che rappresenta una adeguata
rappresentazione della circolazione atmosferica media nella troposfera
che si decompone in una componente simmetrica ∆u is ed una antisimmetrica ∆u ia :
∆u i = ∆u is + ∆u ia = e is j ∆x j + e iaj ∆x j ,
(1.22)
dove
e is j =
µ
¶
1 ∂u i ∂u j
+
,
2 ∂x j
∂x i
e iaj =
µ
¶
1 ∂u i ∂u j
−
.
2 ∂x j
∂x i
(1.23)
La componente simmetrica è
∆u is = ∆x j e is j =
´
1 ∂ ³
∂φ
∆x k ∆x j e sj k =
,
2 ∂∆x i
∂∆x i
(1.24)
dove φ rappresenta una forma quadratica nello spazio 3-dimensionale, che, con una
opportuna rotazione del sistema di riferimento, si può sempre riscrivere come
φ(∆x) =
¢2
1¡
∆x i e isi .
2
(1.25)
Il contributo ∆u is = e isi ∆x i rappresenta un moto in cui un elemento di fluido viene alP
P
lungato, se i e isi > 0, o schiacciato, se i e isi < 0, nella direzione degli assi principali
dell’ellissoide (1.25). Nel caso di un moto incompressibile la divergenza si annulla, ossia
P s
i e i i = 0, ed allungamenti e schiacciamenti si compensano in modo da lasciare inalteP
rato il volume dell’elemento. Pertanto, posto ∆ = i e isi , la velocità ∆u is si divide ulteriormente in una contrazione (espansione) isotropica ∆ue , caratterizzata dalla divergenza
∆, associata ad un tensore
δi j ∆
3 ,
e in uno stiramento (schiacciamento) senza variazioni
di volume ∆ub associato al tensore e is j −
12
δi j ∆
3 .
1.6 D I V E R G E N Z A , D E F O R M A Z I O N I E V O R T I C I TÀ
L’espressione del contributo antisimmetrico ∆u ia coinvolge il vettore
ωk = ²ki j
∂u j
∂x i
= (∇ × u)k .
Usando l’identità ²i j k ²l mk = δi m δ j l − δi l δ j m , tale che e iaj = 21 ²i j k ωk , l’espressione completa di ∆u ia diventa
1
1
∆u ia = ²i j k ω j ∆x k = (ω × ∆x)i .
2
2
Il contributo antisimmetrico rappresenta pertanto una rotazione con velocità angolare
ω
2 . Il vettore ω è chiamato vorticità del fluido.
Al primo ordine in una piccola regione attorno ad x la velocità di un fluido è costituita
da tre distinti contributi: una rotazione, una compressione isotropa, una deformazione (allungamento + compressione) senza variazioni di volume. Indicando le rispettive
velocità come ∆us , ∆ue , ∆ub si ha:
u(x + ∆x) = u(x) + ∆us + ∆ue + ∆ub .
Ne segue che il campo di velocità è costituito da tre componenti fondamentali: ue , ub ,
us , dove i contributi ue , ub sono entrambi irrotazionali, mentre us è solenoidale. Questa
decomposizione non vale solo per il campo delle velocità. Un generico campo vettoriale
si può sempre decomporre in questi tre campi costituenti (Teorema di Clebsh).
L’utilità di questa decomposizione non è soltanto l’analisi delle componenti fondamentali del moto, ma essa consente la ricostruzione del moto del fluido a partire da
quantità dinamiche che possono essere determinate in altro modo. La componente
ue viene determinata dalla distribuzione di sorgenti di volume interne al fluido, che
possono essere dovute ad effettive immissioni di fluido o a variazioni del suo stato termodinamico (espansioni e/o contrazioni). La componente us viene invece determinata dalla distribuzione della vorticità, la cui evoluzione nel tempo è determinata dalla
corrispondente equazione (vedasi sez. 2.5).
In alcuni casi sono possibili semplificazioni. In geofisica si assume quasi sempre un
moto incompressibile, ossia ∆ = 0, e ue risulta nullo. Nel limite di moti a grande scala
la vorticità del fluido è determinata dalla rotazione terrestre ed è quindi nota a priori.
La vorticità caratterizza il moto dei fluidi e la sua presenza consente il moto anche se
la superficie libera del fluido è immobile. Un esempio è costituito dalle onde corte di
Rossby (sez. 4.4). Il moto associato a ub ha invece la caratteristica opposta poiché è
univocamente determinato dal moto della sua superficie libera: esso è importante per
molti moti a piccola scala con vorticità trascurabile. Un esempio è il moto delle onde di
gravità di alta frequenza (4.1).
13
2
DINAMICA
2.1
LE FORZE NEI FLUIDI
Le forze che agiscono sugli elementi di un fluido appartengono a due categorie: forze di
volume e forze di superficie.
Le forze di volume sono le forze a lungo raggio che penetrano all’interno degli elementi
di fluido e sono proporzionali alla massa dell’elemento di fluido. Se f è la forza per unità
di massa, allora sull’elemento di volume δV agisce una forza δF data da
δF(v) = %fδV .
Gli esempi più significativi sono la gravità e le forze fittizie in sistemi di riferimento non
inerziali.
Le forze di superficie sono forze a corto raggio che, essendo dovute alle collisioni molecolari, coinvolgono solo le molecole superficiali dell’elemento e sono quindi proporzionali alla sua superficie. Se Σ(n̂) è la densità superficiale di forza – che dipende dall’orientazione della superficie rappresentata dal versore n̂ = (n 1 , n 2 , n 3 ) – e δS l’elemento
di superficie, allora
δF(s) = Σ(n̂)δS
rappresenta la forza di superficie esercitata attraverso δS dal fluido verso cui n̂ punta. La
pressione e la viscosità dei fluidi sono forze di superficie.
2.1.1 Il tensore degli sforzi
La densità di forza di superficie Σ soddisfa tre proprietà:
1. Σ è una funzione dispari di n̂;
2. Σ si può sempre scrivere come
Σi = σi j n j
(2.1)
dove σi j è un tensore, detto tensore degli sforzi;
3. il tensore σi j è simmetrico, ²i j k σ j k = 0, ossia σ j k = σk j .
Per provare la prima proprietà, si consideri la forza che agisce tra due elementi di fluido,
1 e 2, separati da una superficie ∆S, con n̂ versore ad essa normale. Alla forza F12 =
Σ(n̂)∆S esercitata dall’elemento 1, verso cui n̂ punta, su 2 corrisponde allora una forza
eguale e contraria F21 = −F12 , esercitata da 2 su 1. Per definizione si ha F21 = Σ(−n̂)∆S.
Quindi Σ(n̂) = −Σ(−n̂) .
15
DINAMICA
Figura 5: Elemento infinitesimo a forma di tetraedro a cui sono applicate le forze di superficie.
Per dimostrare la seconda proprietà, si consideri un elemento di fluido a forma di
tetraedro come in fig. 5. Il bilancio delle forze risulta
%
Du
δV = f%δV + Σ(n̂)δS + Σ(−n̂1 )δS 1 + Σ(−n̂2 )δS 2 + Σ(−n̂3 )δS 3 .
Dt
Poiché
δS j = n̂ j · n̂δS,
si ottiene
µ
#
"
¶
3
X
Du
Σ(n̂ j )n̂ j · n̂ δS.
− f %δV = Σ(n̂) −
Dt
j =1
Poiché i membri sono infinitesimi di ordine diverso, l’eguaglianza è valida indipendentemente dalle dimensioni del tetraedro solo se il membro di destra è identicamente
nullo:
Σ(n̂) =
3
X
Σ(n̂ j )n̂ j · n̂.
j =1
Il membro di sinistra è un vettore ed il membro di destra è il prodotto scalare fra un vettore ed un’altra grandezza, che deve essere un tensore di rango 2 affinché l’eguaglianza
sia valida indipendentemente dal sistema di riferimento, ossia
Σi (n̂ j )n j = σi j ,
da cui
Σi = σi j n j .
La terza proprietà si dimostra in modo analogo, considerando il bilancio del momento angolare per un elemento di fluido di forma cubica e dimensione L rispetto al suo
16
2.1 L E F O R Z E N E I F L U I D I
baricentro O. Le forze di volume risultano, a meno di infinitesimi di ordine superiore in
L, in una forza applicata nel punto O stesso il cui momento angolare è nullo. Le forze
di superficie generano un momento angolare la cui componente verticale z è di ordine
(σx y − σ y x )L 3 . Il momento di inerzia del cubo è proporzionale alla massa del cubo ed al
quadrato della sua dimensione, cioè ad L 5 . Pertanto l’accelerazione angolare è finita solo se σx y = σ y x . Applicando lo stesso ragionamento alle altre componenti del momento
angolare si ottiene che σi j = σ j i per ogni i e j .
Per ogni direzione i esiste quindi un vettore σi = (σi 1 , σi 2 , σi 3 ) la cui componente perpendicolare alla superficie δS fornisce la densità superficiale della componente i della
forza: F i(s) = σi j n j δS.
2.1.2 La pressione
Poiché la traccia di σi j è indipendente dal sistema di riferimento, è possibile definire
uno scalare p
p =−
tr [σ]
.
3
(2.2)
Si consideri un sistema di riferimento opportunamente ruotato in modo che il tensore
σi j sia diagonale e l’azione delle forze di superficie si riduca a compressioni od espansioni σi j = 0 se i 6= j e quindi lo si decomponga in due parti
−p
σ= 0
0
σ11 + p
0
0 + 0
0
−p
0
−p
0
0
σ22 + p
0
0
0 .
σ33 + p
Il primo termine rappresenta una forza uniforme che agisce sulla superficie di un elemento di fluido determinando una compressione (od espansione) isotropa. La sua azione determinerebbe necessariamente una variazione di volume a cui la struttura del fluido è in grado di opporsi. Il secondo termine è associato ad almeno una coppia compressione + espansione poiché la sua traccia è 0. Esso quindi può deformare l’elemento di
fluido senza modificarne il volume, e deve quindi annullarsi se il fluido è in equilibrio.
Ne consegue la seguente necessaria condizione per l’equilibrio: in un fluido in quiete la
forza esercitata su ogni elemento è normale alla sua superficie ed indipendente dal suo
orientamento, ossia Σ(n̂) = −p n̂. Lo scalare p è chiamato pressione. Esso rappresenta
il valore medio della forza normale ad una superficie nel fluido per unità di superficie,
dove la media è intesa su tutte le possibili orientazioni della superficie.
Condizione necessaria per l’equilibrio del fluido è che la risultante delle forze applicate
sia nulla,
Z
Z
f i % dV −
p n̂i · δS = 0,
δV
δS
che, per il teorema di Gauss, diventa:
Z
£
¤
f i % − ∇ · (p n̂i ) dV = 0.
δV
17
DINAMICA
Includendo in un’unica equazione vettoriale le tre componenti si ottiene la condizione
necessaria per l’equilibrio:
f% = ∇p .
(2.3)
Se l’unica forza agente è la forza di gravità g = −g ẑ, allora dall’eq. (2.3) si ottiene
%g = −
∂p
.
∂z
(2.4)
La pressione così definita viene denominata pressione idrostatica. Se la densità è costante, ossia % = %0 , l’eq. (2.4) si integra esplicitamente :
p = p 0 − %0 g z.
Tale condizione è generalmente soddisfatta nell’oceano, dove le variazioni di densità
sono nell’ordine dei pochi per mille.
La densità non è costante nell’atmosfera, dove, in condizione di temperatura costante,
per la legge di Boyle vale
p
= R ? T = costante = g H ,
%
R? =
R
, con m̄ peso molecolare medio.
m̄
e, sostituendo nell’eq. (2.3), si ottiene
³ z´
p = p 0 exp −
H
dove H rappresenta la scala verticale dell’atmosfera.
2.2
L’ E Q U A Z I O N E D E L M O T O
La seconda legge di Newton, applicata ad un elemento di fluido, assume la forma
DδP
= δF
Dt
(2.5)
dove δP è la quantità di moto e δF è la risultante delle forze applicate. Poiché la massa è
conservata, il tasso di variazione della quantità di moto è:
DδP
D
Du
=
δ(M u) = δV %
.
Dt
Dt
Dt
Il contributo delle forze di superficie nella direzione n̂i si ottiene dall’integrazione della
componente normale del vettore δF(s) sulla superficie δS i che delimita l’elemento di fluido, ossia dal flusso del vettore σi attraverso δS i . La somma delle forze di volume e delle
forze di superficie dà la forza complessiva, le cui componenti sono δF i = %δV f i + Φ(σi ),
i
per cui la legge di Newton (2.5) diventa % Du
Dt = % f i + ∇ · σi . Utilizzando la notazione cartesiana e separando la pressione dal restante componente d i j dello stress, l’equazione
del moto risulta:
%
18
Du i
∂p ∂d i j
= % fi −
+
.
Dt
∂x i
∂x j
(2.6)
2.3 S I S T E M I D I R I F E R I M E N T O N O N I N E R Z I A L I
Il termine a sinistra rappresenta la variazione di momento per unità di volume. Poiché
la massa è conservata, la variazione di densità è compensata da una variazione di volume e non contribuisce alla variazione di momento. I termini di destra rappresentano la
risultante delle forze di volume e delle forze di superficie, il secondo essendo determinato dalla differenza fra forze di superficie agenti su superfici opposte dell’elemento di
fluido.
2.3
SISTEMI DI RIFERIMENTO NON INERZIALI
Nella fluidodinamica geofisica il sistema di riferimento naturalmente utilizzato per osservare e descrivere i moti del fluido è solidale con la Terra e pertanto non inerziale. In
esso appaiono forze fittizie di fondamentale importanza dinamica per i moti su scala
planetaria.
Si consideri un sistema di riferimento che ruota con velocità angolare Ω, in modo che
i suoi assi di riferimento ĉi varino nel tempo ddtĉi = Ω × ĉi . La variazione nel sistema
P
inerziale di un vettore v = i v i ĉi , dove v i sono le coordinate nel sistema di riferimento
non inerziale, è data da
¯
¯
µ
¶
X dv i
dĉ
dv ¯¯
dv ¯¯
=
ĉ
+
v
=
+ Ω × v,
i
i
dt ¯inerziale
dt
dt
dt ¯non inerziale
i
(2.7)
dove il primo contributo rappresenta la variazione relativa al sistema di riferimento non
inerziale e il secondo risulta dalla rotazione degli assi. Applicando questa formula al
vettore x che rappresenta la posizione di un elemento di fluido si ottiene
¯
¯
¯
¯
µ
¶
d2 x ¯¯
d2 x ¯¯
d dx ¯¯
dΩ ¯¯
+
Ω
×
x
=
× x + Ω × (Ω × x),
=
+
2Ω
×
V
+
r
¯
¯
¯
dt ¯in.
dt 2 in. dt dt non in.
dt 2 non in.
che fornisce la relazione fra l’accelerazione nel sistema di riferimento rotante e in quello
inerziale. Se il sistema non inerziale subisce inoltre un’accelerazione, il membro di destra contiene un ulteriore contributo f0 . Il membro di sinistra è l’accelerazione del fluido
che è proporzionale alla risultante delle forze applicate secondo l’equazione del moto.
Quindi si conclude che
%
¯
dV ¯¯
dΩ
+ 2%Ω × Vr + %
× x + %Ω × (Ω × x) + f0 = %f + ∇ · σ.
¯
dt non inerziale
dt
La rotazione determina la presenza di tre forze: la forza di Coriolis 2%Ω × Vr , una forza
determinata dalle variazioni della velocità angolare, % dΩ
dt × x e la forza centrifuga %Ω ×
(Ω × x).
La forza di Coriolis dipende dalla componente della velocità perpendicolare all’asse
di rotazione. Se il moto ha luogo nel piano x y, in un sistema di riferimento con velocità
di rotazione orientata nella direzione ẑ la forza di Coriolis determina una deviazione
verso destra rispetto alla direzione del moto.
La variazione della velocità angolare del sistema di riferimento è normalmente del
tutto trascurabile per applicazioni meteorologiche ed ambientali.
19
DINAMICA
La forza centrifuga tende ad allontanare il fluido dall’asse di rotazione e si può esprimere come il gradiente di un opportuno potenziale: essa viene perciò inglobata nell’espressione delle forze conservative, e ha come risultato il loro aumento con l’aumentare
della distanza dall’asse di rotazione (vedasi sez. 2.5).
2.4
L’ E Q U A Z I O N E D I N AV I E R - S T O K E S
L’equazione del moto eq. (2.6) non è risolvibile senza specificare l’espressione del tensore σi j . L’equazione di Navier-Stokes si ottiene dall’eq. (2.6) esplicitando la forma di σi j
e conseguentemente di d i j , in funzione della velocità del fluido.
Come visto nella sez. 2.1.2, il tensore σi j si scompone in una componente dovuta alla
pressione ed in un tensore di deviazione d i j = σi j + pδi j che è simmetrico, ha traccia
nulla d i i = 0, e si annulla se il fluido è in equilibrio. Si assume che d i j sia lineare nelle
derivate della velocità:
d i j = A i j kl
∂u k
.
∂x l
dove A i j kl è un tensore isotropo, ovvero della forma generale A i j kl = µ1 δi j δkl +µ2 δi k δ j l +
µ3 δi l δ j k ,con µ1 , µ2 , µ3 costanti arbitrarie. Queste assunzioni corrispondono all’evidenza che gli attriti sono nulli in assenza di gradienti della velocità e che in fluidi come l’aria
e l’acqua non esistono direzioni preferenziali. Poiché d i j è simmetrico, l’espressione si
semplifica in A i j kl = µ1 δi j δkl +µ2 (δi k δ j l +δi l δ j k ). In precedenza è stato dimostrato che
∂u k
1
s
= e kl
+ ²kl m ωm
∂x l
2
e quindi si ha
µ
¶
1
s
s
d i j = [µ1 δi j δkl + µ2 (δi k δ j l + δi l δ j k )] e kl
+ ²kl m ωm = [µ1 δi j δkl + 2µ2 δi k δ j l ]e kl
,
2
cioè
s
d i j = µ1 δi j e kk
+ 2µ2 e is j .
(2.8)
Poiché d i j ha traccia nulla, 3µ1 + 2µ2 = 0 e l’espressione finale per d i j è
di j = µ
µ
¶
∂u i ∂u j 2δi j ∂u k
+
−
.
∂x j
∂x i
3 ∂x k
(2.9)
L’equazione del moto risulta
· µ
¶¸
Du i
∂p
∂
∂u i ∂u j 2δi j ∂u k
%
= % fi −
+
µ
+
−
Dt
∂x i ∂x j
∂x j
∂x i
3 ∂x k
(2.10)
che è l’equazione di Navier-Stokes. Generalmente µ è una costante che dipende dalla
natura del fluido e l’equazione si semplifica in
Ã
!
Du i
∂p
∂2 u i
1 ∂2 u j
= % fi −
+µ
+
(2.11)
%
Dt
∂x i
∂x j ∂x j 3 ∂x i ∂x j
20
2.5 L A V O R T I C I TÀ
che, per moti incompressibili si semplifica ulteriormente in
Du i
1 ∂p
∂2 u i
= fi −
+ν
Dt
% ∂x i
∂x j ∂x j
dove ν =
µ
%
(2.12)
viene chiamata viscosità cinematica.
Du i
∂u i
i
La variazione locale ∂u
∂t = Dt − u j ∂x j della velocità è dovuta alle forze esterne, al
gradiente di pressione, alla viscosità ed alle nonlinearità. Il numero di Reynolds R è il
rapporto fra queste due ultime quantità:
¯
¯
¯ ∂ui ¯
u
¯
j ∂x j ¯
nonlinearità
velocità · lunghezza
R=
= ¯ 2 ¯ ∼
.
¯
¯
∂
u
viscosità
ν
¯ν ∂x 2i ¯
j
Quindi R À 1 caratterizza i regimi non lineari, con presenza di vortici intensi e getti,
viceversa R ¿ 1 caratterizza i regimi dove la viscosità prevale, ed il moto del fluido non
subisce brusche variazioni di velocità.
2.5
L A V O R T I C I TÀ
La vorticità ω = ∇ × u del fluido è un’importante quantità dinamica che caratterizza il
moto di un fluido, e rappresenta il doppio della sua velocità locale di rotazione. In un
sistema di riferimento rotante essa risulta dalla somma di una vorticità relativa ω ed
una vorticità ambientale 2Ω: ωa = 2Ω + ω. La componente 2Ω è dovuta al moto del
sistema di riferimento non inerziale, mentre la componente ω è dovuta al moto relativo
del fluido, osservato nel sistema di riferimento inerziale.
Per derivare le equazioni che ne descrivono le variazioni si utilizzano tre identità vettoriali:
|u|2
+ω×u
2
A × (B × C) = (A · C)B − (A · B)C
(2.13b)
∇ × (A × B) = A(∇ · B) − B(∇ · A) + (B · ∇)A − (A · ∇)B
(2.13c)
(2.13a)
u · ∇u = ∇
L’equazione del moto (2.11), riscritta in forma più compatta ed in un sistema di riferimento rotante trascurando il termine (piccolo per le applicazioni geofisiche) di variazione della velocità angolare Ω, risulta
µ
¶
Du
∇p
1
=−
+ f − 2Ω × u − Ω × (Ω × x) + ν ∇2 u + ∇(∇ · u) .
Dt
%
3
(2.14)
La (2.14) si semplifica ulteriormente, in quanto la forza centrifuga, usando l’eq. (2.13b),
si può esprimere mediante un potenziale Ψc :
Ã
2
2
Ω × (Ω × x) = (Ω · x)Ω − Ω x = −Ω x⊥ = −∇
2
Ω2 x ⊥
2
!
≡ −∇Ψc ;
(2.15)
21
DINAMICA
pertanto, se le forze di volume sono conservative, e.g. f = −g ẑ = ∇φ, i due potenziali Ψc
e φ si possono inglobare in un unico potenziale totale Ψ = φ+Ψc e, utilizzando anche la
(2.13a), l’equazione del momento diventa
µ
¶
∂u
|u|2
∇p
1
2
+ω×u+∇
=−
+ ∇Ψ − 2Ω × u + ν ∇ u + ∇(∇ · u) .
(2.16)
∂t
2
%
3
L’equazione per la vorticità si ottiene prendendo il rotore di (2.16):
∂ω ∇% × ∇p
=
+ ν∇2 ω − (2Ω + ω)(∇ · u) + [(2Ω + ω) · ∇] u,
∂t
%2
(2.17)
dove si è assunto che Ω sia costante.
La variazione della vorticità di un elemento di fluido è dovuta a quattro termini. Il
primo è presente se isolinee di pressione e di densità non sono parallele. In tal caso il
fluido si dice baroclino, altrimenti, se il termine è nullo, il fluido si dice barotropico. In
un fluido barotropico, poiché i gradienti di densità e pressione sono paralleli, l’una può
essere espressa in funzione dell’altra. Questo termine rappresenta le rotazioni indotte
in elementi di fluido dall’azione dello stesso gradiente di pressione su porzioni di fluido
aventi diverse densità o, viceversa, da un diverso gradiente di pressione su porzioni di
fluido aventi uguale densità. Il secondo termine rappresenta l’azione della viscosità, che
tende ad omogeneizzare la vorticità all’interno del fluido. Per comprendere il significato
degli altri due termini, si consideri un sistema di riferimento il cui asse ẑ sia orientato
lungo la direzione locale della vorticità totale ωa = 2Ω + ω:
¡
¢
¡
¢
(ωa · ∇)u − ωa (∇ · u) = ωa ∂z u x x̂ + u y ŷ + u z ẑ − ωa ẑ ∂x u x + ∂ y u y + ∂z u z
¡
¢
¡
¢
= ωa ∂z u x x̂ + u y ŷ − ωa ẑ ∂x u x + ∂ y u y .
Il secondo termine rappresenta l’intensificazione della vorticità dovuta alla convergenza del fluido in un piano normale alla direzione locale della vorticità, che consegue
dalla conservazione del momento angolare. Se il moto è incompressibile, questo moto
corrisponde all’allungamento degli elementi di fluido lungo ωa ed è chiamato stiramento dei tubi di vorticità. Il primo termine rappresenta l’effetto di variazioni lungo ωa della
velocità perperdicolare a ωa .
In assenza di baroclinicità e viscosità, considerando per semplicità un fluido incompressibile nel caso bidimensionale, ωa = ωa ẑ, si ha
Dωa
∂u z
dωa du z
= ωa
→
=
.
Dt
∂z
ωa
uz
Questo termine esprime la tendenza dei filamenti di vorticità a inclinarsi con i filamenti
di fluido in assenza di baroclinicità e di viscosità ed è chiamata inclinazione dei tubi di
vorticità.
2.6
L’ I N T E G R A L E D I B E R N O U L L I
L’eq. (2.16) consente di derivare un’importante legge di conservazione. Se % è costante,
le forze sono conservative, il moto è stazionario (ossia ∂u
∂t = 0), e la viscosità trascurabile
(ν = 0), allora consegue che (2Ω + ω) × u = ∇H dove
H = Ψ−
22
p |u|2
−
,
%
2
2.7 I L T E O R E M A D I K E LV I N
che implica H costante lungo linee di flusso e lungo isolinee della vorticità totale 2Ω +
ω. Se la vorticità totale è nulla, allora H è costante su tutto il fluido. La funzione H è
chiamata funzione di Bernoulli.
2.7
I L T E O R E M A D I K E LV I N
La divergenza sia della vorticità totale ωa che di quella relativa ω è identicamente nulla.
Infatti
ωa = ∇ × ua = ∇ × (u + Ω × r) = ω + 2Ω
per cui
∇ · ωa = 0,
∇ · ω = 0.
Per tubo di vorticità si intende la superficie costituita dalle linee di vorticità che passano
per una linea chiusa. Tali linee sono le linee tangenti in ogni loro punto al vettore vorticità. Poiché il flusso della vorticità attraverso una superficie chiusa è nullo ed il flusso
attraverso le pareti di un tubo di vorticità è nullo per definizione, ne segue che il flusso
della vorticità attraverso una sezione del tubo non dipende dalla scelta della sezione. Si
definisce forza di un tubo
I
Z
Γ = ω · dS = u · dl
γ
S
dove γ è una linea chiusa che giace sul tubo di vorticità. Utilizzando l’eq. (1.15) si ottiene
DΓa
=
Dt
I
Dua
dl ·
+
Dt
γ
I
γ
ua (dl · ∇) ua
dove il secondo integrale si annulla perché è un differenziale esatto (ua · (dl · ∇)ua = dl ·
∇u a2 = du a2 ). Per il calcolo del primo integrale si utilizza l’eq. (2.14). Le forze conservative
danno un contributo nullo. Il contributo del gradiente di pressione è:
∇p
−
· dl =
γ %
Z
Z
S
∇% × ∇p
· dS
%2
e quindi si annulla se il fluido è barotropico. Si può enunciare quindi il seguente
T EOREMA DI K ELVIN 2.1 - Se la viscosità è nulla, se il fluido è barotropico e le forze sono
conservative, l’intensità di un tubo di vorticità totale è costante.
Dal teorema di Kelvin consegue che i tubi di flusso sono permanenti, ossia una superficie materiale che individua un tubo di flusso continua a individuarlo durante il
successivo moto del fluido. Una linea di vorticità è il limite cui tende un tubo di flusso al diminuire della sua sezione. Il teorema di Kelvin mostra che le linee di vorticità si
muovono con il fluido, se il fluido è barotropico e non viscoso.
Così come la vorticità, anche la forza di un tubo può essere divisa in una componente ambientale ed una relativa: Γa = Γ + 2Ω∆A ⊥ , dove ∆A ⊥ rappresenta una sezione del
23
DINAMICA
tubo ortogonale ad Ω, vorticità planetaria. Poiché Γa è conservata, vi è un meccanismo
che incrementa/diminuisce Γ in presenza di diminuzioni/aumenti di ∆A ⊥ , ossia di moti
convergenti/divergenti del fluido in un piano perpendicolare ad Ω. Il meccanismo secondo cui tale conversione ha luogo è dovuto alla forza di Coriolis, che, deviando verso
destra le traiettorie degli elementi di fluido, induce una rotazione antioraria/oraria per
moti convergenti/divergenti in presenza di vorticità ambientale Ω positiva.
2.8
L A V O R T I C I TÀ P O T E N Z I A L E
∇p×∇%
Il teorema di Kelvin non vale quando il vettore baroclino B = %2 è non nullo e quindi
modifica la forza di un tubo di vortice. Tuttavia è possibile, grazie al teorema di Ertel,
identificare una diversa quantità, detta vorticità potenziale, che è conservata.
Se esiste uno scalare λ costante durante il moto del fluido, ossia corrispondente ad
una quantità conservata, allora le superfici dove λ è costante corrispondono a superfici
materiali permanenti, ossia che si muovono con il fluido, o, in altre parole, la porzione
di tubo di vorticità, inizialmente compresa fra due superfici corrispondenti al valore λ e
λ + ∆λ, resterà compresa fra di esse durante il moto. Se questo scalare è funzione solo
della densità e della pressione del fluido1 , allora il vettore baroclino è perpendicolare al
gradiente di λ,
µ
¶
∇p × ∇% ∂λ
∂λ
B · ∇λ =
·
∇p +
∇% = 0
%2
∂p
∂%
ed il suo flusso attraverso una superficie dove λ è costante è sempre nullo. In queste
ipotesi la forza di un tubo di vorticità non è costante, ma è costante il flusso di vorticità
attraverso la superficie che delimita la porzione di tubo considerata. Se il tubo ha una
sezione infinitesima δS allora
∂
(ωa · δS) = 0.
∂t
(2.18)
Poiché la massa δM contenuta nella porzione di tubo è costante allora δS =
δl distanza fra le due superfici vale δl =
un’equazione di conservazione:
µ
¶
DΠ
D
∇λ
=
ωa ·
= 0.
Dt
Dt
%
∆λ
|∇λ| ,
δM
%δl ,
dove
con ∆λ costante allora l’eq. (2.18) risulta
La funzione Π è chiamata vorticità potenziale. Pertanto è stato dimostrato il seguente
teorema:
T EOREMA DI E RTEL 2.2 - Se Dλ
Dt = 0 e λ è una funzione solo di p e %, allora la vorticità
∇λ
potenziale Π = ωa · % è conservata: DΠ
Dt = 0.
Il termine vorticità potenziale esprime la capacità di questo meccanismo di variare la
vorticità del fluido secondo le variazioni del gradiente di λ, precisamente di fornire vorti1 Ad esempio la densità stessa, se il moto è incompressibile, o la temperatura potenziale in un caso più
generale.
24
2.8 L A V O R T I C I TÀ P O T E N Z I A L E
cità quando il gradiente diminuisce e di assorbirla quando esso aumenta, ossia, se il moto è incompressibile, quando gli elementi di fluido vengono rispettivamente allungati o
∇%
compressi. Nel caso in cui λ ≡ %, Π = ωa · % .
Nel caso di un moto che si sviluppa in modo bidimensionale, u = (u, v, 0), il ruolo di
DδV
λ è assunto semplicemente da z, Dz
Dt = 0. Perciò, ricordando che Dt = 0 e ponendo
% = δM
δV come sopra
µ
¶
µ
¶
µ
¶
D
δM
δV
D
D
D 2Ω + ω
ωa
=
ωa
= δV
= 0,
(ωa · δS) =
Dt
Dt
%δl
Dt
∆z
Dt
H
2Ω + ω
,
Π=
H
dove abbiamo indicato H ≡ ∆z.
25
3
M O T I A G R A N D E S C A L A N E L L’ AT M O S F E R A E N E L L’ O C E A N O
Questo capitolo introduce le equazioni necessarie per descrivere i moti a grande scala
che caratterizzano le strutture principali della circolazione generale dell’oceano e dell’atmosfera. In particolare è discussa la semplificazione dinamica che deriva dalla geometria quasi-piana dei moti a grande scala in cui la velocità è quasi esclusivamente orizzontale, e sono descritte le caratteristiche del regime geostrofico, in cui forza di Coriolis
e gradiente di pressione si bilanciano.
3.1
L E E Q U A Z I O N I I N C O O R D I N AT E G E O G R A F I C H E
Per studiare i moti dell’atmosfera e dell’oceano rispetto alla superficie terrestre, le equazioni della sezione precedente vanno riscritte in coordinate geografiche r (distanza radiale), φ (latitudine), λ (longitudine). La componente zonale della velocità u è nella
direzione di λ, la velocità meridionale v nella direzione di φ e la componente verticale
w, nella direzione di r . Per semplicità si assume che la risultante della gravità e della
forza centrifuga sia sempre diretta lungo r̂. Si ha:
u = r cos φλ̇,
v = r φ̇,
w = r˙.
In coordinate geografiche la derivata totale di uno scalare ξ è
Dξ ∂ξ
u
∂ξ v ∂ξ
∂ξ
=
+
+
+w
Dt
∂t r cos φ ∂λ r ∂φ
∂r
e la divergenza di un vettore v:
¸
·
µ
¶
1
∂ ³ v λ ´ ∂ v φ cos φ
1 ∂ 2
div (v) =
+ 2
+
(r v r cos φ) .
cos φ ∂λ r
∂φ
r
r ∂r
Pertanto la conservazione della massa diventa:
D%
% ∂u
%
∂
% ∂r 2 w
+
+
(v cos φ) + 2
= 0.
Dt r cos φ ∂λ r cos φ ∂φ
r
∂r
L’equazione del momento ha una struttura complessa. Il termine 2Ω×u dà un contributo
2Ω × u = 2Ω(−v sin φ + w cos φ, u sin φ, −u cos φ).
Il contributo non lineare determina la presenza di numerosi termini quadratici che, a
causa della curvatura terrestre, non sono confinati esclusivamente nella derivata totale.
27
MOTI A GRANDE SCAL A
La loro presenza nelle equazioni deriva dalle variazioni dell’orientamento del sistema di
riferimento durante il moto di un elemento di fluido. L’equazione risultante è
¶
µ
1
∂p
Du
u
(v sin φ − w cos φ) = −
− 2Ω +
+ D λ,
Dt
r cos φ
%r cos φ ∂λ
µ
¶
Dv w v
u
1 ∂p
+
+ 2Ω +
u sin φ = −
+ D φ,
Dt
r
r cos φ
%r ∂φ
Dw u 2 + v 2
1 ∂p
−
− 2Ωu cos φ =
− g + D r , (3.1)
Dt
r
% ∂r
dove il vettore (D λ , D φ , D r ) rappresenta il contributo dei termini di attrito viscoso.
3.2
SISTEMI DI RIFERIMENTO CARTESIANI
Le equazioni in coordinate sferiche sono geometricamente complesse e la comprensione della dinamica risulta più immediata in coordinate cartesiane. È ovvio che se ci si
limita ad una porzione limitata della superficie terrestre il cui spessore sia piccolo rispetto al raggio della Terra si può utilizzare un sistema cartesiano il cui piano x, y sia
tangente alla superficie.
Riscriviamo le equazioni introducendo le coordinate curvilinee
x = R cos φ0 λ,
y = R(φ − φ0 )
z = r −R
dove il sistema di coordinate ha origine al punto λ = 0, φ = φ0 , r = R. Introduciamo le
scale L, H ,U ,W in modo che le variabili adimensionali
x0 =
x
,
L
y0 =
y
,
L
z0 =
z
,
H
u0 =
u
,
U
v0 =
v
,
U
siano di ordine uno ed assumiamo che:
µ ¶2
H
L
L
¿ 1,
¿ 1,
tan φ0 ¿ 1.
R
R
R
w0 =
w
W
(3.2)
Queste condizioni indicano uno spessore di fluido piccolo rispetto al raggio terrestre,
un’estensione in latitudine e longitudine ristretta ad una piccola porzione della superficie terrestre ed infine che si è distanti dai poli.
Localmente le coordinate curvilinee sono equivalenti ad un sistema di riferimento
cartesiano, il cui piano x y è tangente alla superficie sferica. Si noti che utizzando le
coordinate curvilinee, fermandosi al primo ordine nell’espansione di Taylor, si ha:
µ
¶
µ
¶
µ
¶
1 1
H
y 0L
1 y 0L
≈
1 − z0
, cos φ ≈ cos φ0 1 − tan φ0
, sin φ ≈ sin φ0 1 +
.
r R
R
R
tan φ0 R
Per cui, nella stessa approssimazione, la derivata totale della densità è
µ
¶
µ
¶
D% ∂%
1
y 0L z 0 H
∂%
z0H
∂%
∂%
≈
+
1+
−
u
+ 1−
v
+w
Dt
∂t R cos φ0
R
R
∂x
R
∂y
∂z
∂%
∂%
∂%
∂%
≈
+u
+v
+w
.
∂t
∂x
∂y
∂z
28
3.3 M O T I Q U A S I - P I A N I
e la divergenza della velocità diventa
µ
¶
µ 0 ¶
µ
¶
2
y 0L z 0 H
∂v
zH
∂w
2HW
z0H
∂u
0 L
1 + tan φ0
−
+
−
+
+v
tan φ0 +
1−
w0 ≈
∂x
R
R
∂y
R
∂z
RU
RH
R
∂u ∂v ∂w
+
+
,
∂x ∂y
∂z
cioè l’equazione della conservazione della massa in coordinate cartesiane, per la cui
derivazione, sono state adottate, implicitamente, per le scale le relazioni:
1 U W
≡ =
,
T
L
H
seguendo lo stesso procedimento per le equazioni del momento, si ottiene il seguente
sistema di equazioni:
Du
1 ∂p
− f v + f˜w +
= 0,
Dt
% ∂x
Dv
1 ∂p
+f u+
= 0,
Dt
% ∂y
Dw ˜
u 2 + v 2 1 ∂p
−f u−
+
+ g = 0,
Dt
R
% ∂z
1 D% ∂u ∂v ∂w
+
+
+
= 0,
% Dt ∂x ∂y
∂z
dove
f = f 0 + βy,
f 0 = 2Ω sin φ0 ,
β = 2Ω
cos φ0
,
R
f˜ = 2Ω cos φ0 .
Queste equazioni costituiscono la cosiddetta approssimazione del piano β. Se si sceglie
di porre β = 0 si parla di approssimazione del piano f . Alle medie latitudini si ha β =
1.6 · 10−11 ms−1 e f 0 = 10−4 s−1 .
3.3
M OT I QUA S I - PI A N I
Una caratteristica dei moti dell’atmosfera e dell’oceano è che si svolgono su uno strato
estremamente sottile. Ciò è stato in parte già sfruttato nella sezione precedente, ma
ha ulteriori implicazioni. Infatti non solo il rapporto H
R è piccolo, ma anche il rapporto
H
è
piccolo:
la
scala
orizzontale
dei
moti
è
molto
più
grande della scala verticale (la
L
profondità media dell’oceano è circa 4 km mentre la larghezza è di migliaia di kilometri).
Quindi HL ≈ 10−3 . Un’importante conseguenza è che la pressione è idrostatica anche
quando il fluido è in moto. Usando le stesse scale del capitolo precedente introduciamo
le due condizioni:
H
¿ 1,
L
cot φ0
H
¿ 1.
L
La seconda condizione indica che siamo sufficientemente distanti dall’equatore.
29
MOTI A GRANDE SCAL A
La scala dei vari termini nell’equazione della componente x del momento è:
Du
−
Dt
|{z}
U
T
fv
|{z}
+
2Ω sin φ0U
f˜w
|{z}
+
2Ω cos φ0 ULH
1 ∂p
= 0.
% ∂x
| {z }
P
%L
¯ ¯
¯ ¯
|u · ∇u|. In molti casi le non linearità
Abbiamo ipotizzato che U T = L ossia che ¯ ∂u
∂t ¯ ∼
sono invece minori ed U T ¿ L, ma le conclusioni di questa sezione non dipendono da
questo rapporto. Risulta allora che:
¯
¯
¯ f˜w ¯ H
¯ ¯ ∼ cot φ0 .
¯f v¯
L
per cui l’unica componente della rotazione dinamicamente rilevante è quella perpendicolare al piano del moto. Inoltre risulta che la scala della pressione è:
½
¾
1
P = %U L max f ,
.
T
La scala dei vari termini nell’equazione per la componente z è:
Dw
−
Dt
|{z}
U2H
L2
f˜u
|{z}
2Ω cos φ0U
−
u2 + v 2
+
R }
| {z
U2
R
UL
H
1 ∂p
% ∂z
| {z }
+ g = 0.
|{z}
g
max{ f , T1 }
Confrontando i vari termini con quello contenente la pressione si ha che
¯ 2 2¯
¯ Dw ¯ µ ¶
¯ ¯
¯ u +v ¯
2
¯
¯
¯ f˜u ¯
¯ R ¯ H
H
H
Dt
¯∼
¯ ∼ cot φ0 ,
¯ ∼
¯
¯
¯
,
¯ 1 ∂p ¯
¯ 1 ∂p ¯ L
¯ 1 ∂p ¯
L
R
¯ % ∂z ¯
¯ % ∂z ¯
¯ % ∂z ¯
pertanto la gravità è l’unica forza che può bilanciare il gradiente di pressione, e vale il
bilancio idrostatico.
Si consideri uno strato di fluido di densità costante: allora p(x, y, z) = g %(η − z) dove
η è il livello della superficie libera del fluido, ed il gradiente orizzontale non dipende
dalla coordinata verticale. È plausibile allora sostenere che anche il moto risultante non
dipende da z e le derivate secondo z vanno eliminate dalle equazioni del moto. Si hanno
allora le equazioni per moti quasi-piani (shallow–water in inglese) non viscosi:
∂u
∂u
∂u
∂η
+u
+v
− f v +g
= 0,
∂t
∂x
∂y
∂x
∂v
∂v
∂v
∂η
+u
+v
+ f u+g
= 0,
∂t
∂x
∂y
∂y
∂
∂
∂
(η − h b ) +
u(η − h b ) +
v(η − h b ) = 0;
∂t
∂x
∂y
L’ultima equazione discende dalla relazione di continuità, supponendo
grando tra h b , altezza del fondale, ed η, livello della superficie:
Z η
Z η
Z η
∂u
∂v
∂w
dz +
dz +
dz = 0;
h b ∂x
h b ∂y
h b ∂z
30
(3.3a)
(3.3b)
(3.3c)
D%
Dt
= 0 ed inte-
3.4 I L B I L A N C I O G E O S T R O F I C O
R h(x) ∂ f (x,y)
∂g (x)
∂
dy + f (x, h(x)) ∂h(x)
g ( x) f (x, y) dy = ∂x g ( x)
∂x
∂x − f (x, g (x)) ∂x , posRη
Rη
∂η
∂
b
siamo scrivere h ∂u
dz = ∂x
u dz −u ∂x +u ∂h
∂x ed analogamente per v. Poiché infine
hb
b ∂x
∂η
Dη
Dt = ∂z + u · ∇η = w|η ed analogamente per h b , si ha
dal fatto che
∂
∂x
R h(x)
Dη Dh b
∂
−
+
Dt
Dt
∂x
Z
η
hb
u dz − u
∂η
∂h b
∂
+u
+
∂x
∂x
∂y
Z
η
hb
v dz − v
∂η
∂h b
+v
=0
∂y
∂y
che può approssimativamente riscriversi come la (3.3c), supponendo una debole dipendenza di u e v da z.
3.4
IL BILANCIO GEOSTROFICO
Molte delle approssimazioni del par. 3.3 derivano dall’analisi delle caratteristiche geometriche del moto, senza considerarne la dinamica. L’approssimazione geostrofica è
invece valida per i moti, detti a grande scala, in cui la forza di Coriolis ha un ruolo
dominante, cioè sono fondamentalmente condizionati dalla rotazione terrestre.
I moti a grande scala sono caratterizzati da scale temporali paragonabili al periodo
di rotazione della Terra. L’effetto della rotazione terrestre è importante per questi moti,
mentre è trascurabile per i moti a piccola scala normalmente coinvolti nelle attività umane. La distinzione fra moti a grande e piccola scala viene resa più precisa introducendo
il numero di Rossby ²R . Se L è l’ampiezza del moto e U la sua velocità caratteristica allora
il tempo caratteristico è T = UL . Il numero di Rossby è definito come
²R =
U
.
2ΩL
Il numero di Rossby rappresenta simultaneamente il rapporto fra frequenza del moto e
frequenza della rotazione terrestre, fra vorticità relativa e vorticità planetaria, fra derivata totale e termine di Coriolis nell’equazione del moto. Un valore piccolo del numero di
Rossby caratterizza i moti a grande scala.
L’analisi dell’equazione del moto mostra che se il numero di Rossby è piccolo allora
vale approssimativamente l’eguaglianza
2Ω × u = −
∇p
− %g,
%
(3.4)
ossia il gradiente di pressione è bilanciato dalla forza di Coriolis. Il fluido che si trova in
questa condizione dinamica viene definito in bilancio geostrofico.
3.5
L E C O O R D I N AT E I S O B A R I C H E
Quando la pressione è idrostatica è spesso vantaggioso sostituire alla coordinata verticale la pressione ed ottenere un sistema di equazioni in cui non appaia esplicitamente la
densità del fluido. In questo nuovo sistema di coordinate (x, v, p), chiamate isobariche,
ogni elemento di fluido è caratterizzato dalla densità %(x, y, p) e dalla velocità (u, v, ξ)
Dp
dove ξ = Dt .
31
MOTI A GRANDE SCAL A
In coordinate isobariche la conservazione della massa per un elemento di fluido è
D%δV
D%δxδyδz Dδxδyδp
=
=
= 0,
Dt
Dt
Dt
(3.5)
per cui la conservazione della massa diventa la conservazione del “volume” nello spazio
definito dalle coordinate isobariche:
∂u ∂v ∂ξ
+
+
=0
∂x ∂y ∂p
(3.6)
ossia la “velocità” è sempre non-divergente.
Per esprimere le equazioni del moto in coordinate isobariche occorre esprimere mediante esse il gradiente orizzontale della pressione. Si noti che (ignorando temporaneamente la variabile y) se due spostamenti successivi ∆x e ∆z sono scelti in modo da
riportarsi sulla stessa superficie isobarica si ha
µ
¶
¶
¶
¶ µ ¶
µ
µ
µ
µ ¶
∂p
∂z
∂p
∂p
∂p
∂z
∆x +
∆z = 0 ⇒
=−
= −g %
,
∂x z
∂z x
∂x z
∂z x ∂x p
∂x p
che, introducendo la funzione geopotenziale Φ definita dalla relazione
dΦ = −
dp
= g dz
%
(3.7)
diventa
µ
¶
µ ¶
∂Φ
∂z
=g
.
∂x z
∂x p
Le due equazioni per le componenti orizzontali del momento diventano, ignorando i
contributi viscosi
Du
∂Φ
−f v =−
,
Dt
∂x
Dv
∂Φ
+f u=−
.
Dt
∂y
(3.8a)
(3.8b)
Si noti che, a z costante, la pressione e il geopotenziale hanno massimi e minimi in
corrispondenza nonostante
³ ´il segno
³ ´‘−’ presente
³ ´ nella
³ ´definizione
³ ´ (3.7); ciò può
³ esse´
∂p
∂p ∂z
∂p
∂p
∂p
∂z
re visto dal fatto che 0 = ∂x = ∂x + ∂z ∂x = ∂x − g % ∂x e dunque ∂x =
p
z
p
z
p
z
³ ´
³ ´
∂z
g % ∂x
= % ∂Φ
.
∂x
p
3.6
p
IL VENTO TERMICO
Perché il numero di Rossby rimanga permanentemente piccolo durante il moto del fluido occorre che la vorticità relativa resti sempre trascurabile rispetto a quella planetaria.
Pertanto l’equazione della vorticità deve semplificarsi in:
(2Ω · ∇)u − 2Ω(∇ · u) = −
32
∇% × ∇p
%2
(3.9)
3.7 M O D E L L O A D U E S T R AT I
ossia la produzione di vorticità per baroclinicità deve essere bilanciata dallo stiramento
e dall’inclinazione degli elementi di fluido.
In un sistema di riferimento con l’asse z parallelo ad Ω, le componenti dell’equazione
(3.9) si scrivono come:
µ
¶
∂u
1 ∂p ∂% ∂p ∂%
2Ω
,
(3.10a)
= 2
−
∂z
% ∂z ∂y ∂y ∂z
µ
¶
∂v
1 ∂p ∂% ∂p ∂%
2Ω
=
−
,
(3.10b)
∂z %2 ∂z ∂x ∂x ∂z
¶
µ
¶
µ
1 ∂p ∂% ∂p ∂%
∂u ∂v
= 2
.
(3.10c)
+
−
2Ω
∂x ∂y
% ∂x ∂y ∂y ∂x
Le prime due collegano la derivata verticale della velocità alle derivate orizzontali della
densità. Se la velocità del fluido ad un livello di riferimento è nota, queste equazioni consentono di ricavare i profili della velocità orizzontale da misure di densità, utilizzando
per la pressione l’espressione idrostatica. Poiché le variazioni di densità sono comunemente dovute a variazioni di temperatura le correnti (o i venti) descritti da (3.10a) e
(3.10b) sono detti venti termici.
Le equazioni del vento termico assumono una forma particolarmente semplice in
coordinate isobariche. Infatti dalla definizione di geopotenziale, derivando rispetto a
p le equazioni (3.8) in bilancio geostrofico, si ottiene:
f
∂v
∂2 Φ
1 ∂%
=
=
,
∂p ∂x∂p %2 ∂x
f
∂u
∂2 Φ
1 ∂%
=
=− 2
.
∂p ∂y∂p
% ∂y
oppure
f
µ ¶
g ∂%
∂v
,
=−
∂z
% ∂y p
f
µ ¶
∂u g ∂%
.
=
∂z
% ∂y p
relazioni che esprimono il tasso di variazione verticale della velocità in funzione della
variazione orizzontale di densità lungo superfici isobariche.
3.7
M O D E L L O A D U E S T R AT I
Supponiamo di disporre di due fluidi di differente densità, immiscibili tra loro (o tali da
poter essere considerati immiscibili). Se %1 è la densità (costante) del liquido superiore,
con velocità orizzontali u 1 e v 1 , e %2 è quella (costante) del liquido inferiore, con velocità
orizzontali u 2 e v 2 , supponiamo che l’interfaccia si trovi ad una profondità z = −H1 +
h(x, y, t ) (all’equilibrio z = −H1 ) e che la superficie superiore (all’equilibrio individuata
da z = 0) sia tale che z = η(x, y, t ). Allora p 1 = %1 g (η − z) per −H1 + h < z < η. Poiché
supponiamo di essere in assenza di vorticità, le equazioni shallow-water diventano
∂u 1
∂η
∂v 1
∂η
= −g
,
= −g
,
∂t
∂x
∂t
∂y
µ
¶
∂(η + H1 − h)
∂u 1 ∂v 1
+ H1
+
= 0;
∂t
∂x
∂y
(3.11a)
(3.11b)
33
MOTI A GRANDE SCAL A
derivando la (3.11b) rispetto al tempo ed utilizzando le (3.11a)
∂2
∂t 2
µ
(η − h) = H1 g
∂2
∂x 2
+
∂2
¶
∂y 2
η ≡ g H1 ∇2H η.
(3.12)
Analogamente per il secondo strato, p 2 = %1 g (η + H1 − h) + %2 g (−H1 + h − z) per z <
−H1 + h, per cui, introducendo la gravità ridotta
g0 = g
%2 − %1
,
%2
si ottengono le equazioni
∂u 2
%1 ∂η
∂h
= −g
−g0
,
∂t
%2 ∂x
∂x
∂v 2
%1 ∂η
∂h
= −g
−g0
,
∂t
%2 ∂y
∂y
µ
¶
∂h
∂u 2 ∂v 2
+ H2
+
= 0,
∂t
∂x
∂y
(3.13a)
(3.13b)
detta z = −H2 la quota del fondale. Procedendo come prima si ottiene
∂2 h
∂t 2
¡
¢
= H2 ∇2H g η − g 0 η + g 0 h .
(3.14)
Le equazioni ottenute governano dunque l’evoluzione del sistema. Il problema può essere tuttavia semplificato di molto ponendo h(x, y, t ) = µη(x, y, t ), dove µ è una costante;
perciò le equazioni (3.12) e (3.14) si riducono a
∂2 η
∂t
2
= c e2 ∇2H η,
(3.15)
dove
c e2 =
g H1
g − g 0 (1 − µ)
= H2
⇒ c e4 − g H c e2 + g g 0 H1 H2 = 0,
1−µ
µ
dove H = H1 + H2 , profondità totale all’equilibrio. Definendo c e2 = g He , He profondità
equivalente, l’equazione diventa
g He2 − g H He + g 0 H1 H2 = 0;
poiché negli oceani le variazioni di densità sono molto piccole (dell’ordine del 3%%),
g0
g
è infinitesimo³ e risolvendo l’equazione
si ottengono due diversi valori per c e2 : il maggio´
re è c 02 = g H 1 −
g 0 H1 H2
g H2
+ . . . per cui
η
h
≈
H
H2
e
u2
u1
≈ 1 nel limite
g0
g
→ 0 (in cui il liqui-
1
do diventa
a densità uniforme,
modo barotropico ); la radice minore vale invece c 12 =
³
´
0
0
g H1 H2
g
g 0H
η
1
1 + g HH1 H2 2 + . . . e corrisponde ai rapporti approssimati h ≈ − g H2 e uu12 ≈ − H
H
H2
(modo baroclino, ovvero la pressione non è costante sulle superfici di densità costante).
Per gli oceani solitamente c 1 = 2−3 m · s−1 , per cui la profondità equivalente è di 0.5−1 m.
1 Solitamente per barotropico si intende che la pressione è costante sulle superfici a densità costante, e dunque è costante all’interfaccia: ciò è solo approssimativamente vero ma si è soliti usare questa espressione
egualmente.
34
3.7 M O D E L L O A D U E S T R AT I
3.7.1 Il modo baroclino
Il modo barotropico si ottiene semplicemente trattando il fluido come dotato di densità
uniforme. Ci sono due particolari approssimazioni da fare per ottenere, invece, il modo
baroclino. La prima consiste nel supporre η molto piccola rispetto alle fluttuazioni sull’interfaccia (approssimazione a coperchio rigido). Così la terza delle equazioni (3.11b)
diventa
µ
¶
∂h
∂u 1 ∂v 1
−
= 0.
(3.16)
+ H1
+
∂t
∂x
∂y
Il secondo tipo di approssimazione consiste nel rimpiazzare
(approssimazione di Bousinnesq)
∂u 2
∂η
∂h
= −g
−g0
,
∂t
∂x
∂x
%1
%2
con l’unità nelle (3.13a)
∂v 2
∂η
∂h
= −g
−g0
.
∂t
∂y
∂y
(3.17)
Sottraendo le (3.17) dalle (3.11a) si ottiene
∂h
∂ û
= g0
,
∂t
∂x
∂ v̂
∂h
= g0
,
∂t
∂y
(3.18)
con û = u 1 −u 2 e v̂ = v 1 − v 2 differenze di velocità tra i due strati; sottraendo ora
la (3.13b) ad
1
H1
1
H2
volte
volte la (3.16) si ottiene
µ
¶
∂ û ∂ v̂
1
1 ∂h
+
−
+
= 0.
∂x ∂y
H1 H2 ∂t
(3.19)
Combinando la (3.19) con la (3.18) otteniamo l’equazione delle onde
∂2 h
∂t 2
= c 12 ∇2H h,
c 12 =
g 0 H1 H2
, quadrato della velocità del modo baroclino.
H1 + H2
Il valore di c 12 ottenuto corrisponde a quello già trovato nel limite
allora la precedente corrisponde all’equazione
g0
g
→ 0. Se He =
c 12
g ,
1
1
1
= 0
+ 0 .
g He g H1 g H2
Tipicamente g 0 = 0.03 m · s−2 , H1 = 400 m, H2 = 4000 m, per cui He ≈ 1 m.
35
4
ONDE LINEARI
Le onde lineari sono ottenute dalle equazioni del moto ignorando i termini avvettivi.
2
Questo è giustificato se UL ¿ U
T , dove L è la lunghezza d’onda, T il suo periodo e U la
velocità del fluido, cioè se la velocità del fluido è molto più piccola della velocità di fase
dell’onda. Questo corriponde a onde in cui lo spostamento degli elementi di fluido U T
è molto più piccolo della lunghezza d’onda L, ossia onde poco ripide, nel caso che il
segnale propagato sia l’elevazione.
Il materiale contenuto in questo capitolo si suddivide in due categorie: onde irrotazionali ed onde in presenza di rotazione (limitatamente al solo regime barotropico).
Le onde irrotazionali si ottengono dalla soluzione dell’equazione del moto in un sistema di riferimento non rotante, in assenza di viscosità
∇p
Du
=−
,
Dt
%
con velocità non divergente, ∇ · u = 0, e densità costante. Esse sono onde con vorticità
nulla, dove la velocità verticale è dello stesso ordine di quella orizzontale e pertanto non
vale il bilancio idrostatico. Sono onde di piccola scala (il numero di Rossby è ²R = ∞) la
cui lunghezza raggiunge al massimo il chilometro ed il cui moto è prodotto dall’instabilità dell’interfaccia aria–mare in presenza di vento. Le forze di richiamo sono la gravità
e la tensione superficiale.
L’effetto della rotazione è analizzato identificando le soluzioni ondulatorie delle equazioni lineari per moti quasi-piani:
∂u
∂t
∂v
∂t
∂Hu
∂x
∂η
− f v = −g ∂x ,
(4.1a)
+ f u = −g
(4.1b)
∂η
∂y ,
∂η
v
+ ∂H
∂y + ∂t = 0,
(4.1c)
dove si suppone h b indipendente dal tempo e η − h b ≈ −h b ≡ H , profondità del fluido.
La linearizzazione dell’ultima equazione implica η ¿ H , che è un requisito non necessariamente soddisfatto da onde di piccola ampiezza, ma richiede H À L, ossia una lunghezza d’onda non grande rispetto alla profondità. In questo tipo di onde la pressione è
idrostatica e la vorticità non nulla.
In un piano f , in assenza di variazioni di profondità le uniche onde descrivibili dalle
(4.1) sono le onde di Poincarè–Sverdrup, la cui frequenza angolare verifica la condizione
$ ≥ f . La presenza di una costa permette una ulteriore soluzione detta onda di Kelvin.
Se sono incluse variazioni della profondità o di f sono possibili onde di bassa frequenza
($ < f ) dette onde di Rossby.
37
ONDE LINEARI
4.1
O N D E D I G R AV I TÀ
Dalla (2.17) si ottiene che in un sistema di riferimento non rotante se la vorticità è nulla
inizialmente, essa resta nulla anche nella continuazione del moto. Si può quindi assumere per moti a piccola scala che il moto sia irrotazionale. L’irrotazionalità è garantita se la
velocità è espressa come gradiente di una funzione φ, potenziale della velocità, u = ∇φ.
In tal caso l’equazione ∇ · u = 0 diventa l’equazione di Laplace:
∂2 φ
∂x 2
+
∂2 φ
∂z 2
= 0,
(4.2)
dove, per semplicità, l’asse x è stato orientato nella direzione della componente orizzontale della velocità. Tale equazione è valida fra il fondo del fluido z = −H e la sua
superficie z = η. Quest’ultima non è costante ma è parte della soluzione che richiede
la determinazione di η e di u. Cercando una soluzione ondulatoria dell’eq. (4.2) nella
forma φ(x, z, t ) = Z (z)ei (kx−$t ) si ottiene Z (z) = c 1 ekz + c 2 e−kz . Imponendo come prima
condizione al contorno, sul fondo del fluido, al livello z = −H , l’annullarsi della velocità
∂φ
verticale ∂z = 0, si ottiene:
φ(x, z, t ) = w 0 cosh [k(z + H )] ei (kx−$t ) .
Per completare la soluzione occorre specificare la relazione di dispersione che collega
k ad $, la cui derivazione richiede altre due condizioni. La prima, detta cinematica,
impone che durante il moto gli elementi di fluido che si trovano alla superficie η non si
discostino da essa:
∂η
∂η
D
(η − z) = 0 ovvero
+u
= w.
Dt
∂t
∂x
(4.3)
La seconda, detta dinamica, deriva dall’equazione del moto eq. (2.16) che si semplifica,
per moti non viscosi ed irrotazionali, in
|u|2
∂u
∇p
+∇
=−
+ ∇Ψ.
∂t
2
%
(4.4)
Riscrivendo l’eq. (4.4) in termini del potenziale della velocità si ottiene
µ
¶
∂φ 1
p
2
∇
+ |∇φ| + + g z = 0,
∂t 2
%
da cui segue che alla superficie del fluido, dove p = p 0 , pressione atmosferica,
µ
¶
∂φ 1
+ |∇φ|2
+ g η = 0.
∂t 2
z=η
(4.5)
La (4.3) e la (4.5) vengono linearizzate espandendo il potenziale della velocità attorno la
livello z = 0, ed ignorando i termini di ordine kη, ossia assumendo onde poco ripide. Si
ottiene la coppia di equazioni:
¯
¯
∂η ∂φ ¯¯
∂φ ¯¯
i (kx−$t )
=
= k sinh(k H )e
,
−g η =
= −i $ cosh(k H )ei (kx−$t ) , (4.6)
∂t
∂z ¯z=0
∂t ¯z=0
38
4.1 O N D E D I G R AV I TÀ
Figura 6: Propagazione delle onde di gravità verso la costa.
per cui, facendo il rapporto membro a membro
∂η
gk
∂2 η
gk
∂η g 2 k 2
tanh2 (k H )η,
= −i
tanh(k H )η ⇔ − 2 = i
tanh(k H )
=
∂t
$
$
∂t
$2
∂t
che permette direttamente di trovare la relazione di dispersione
⇒ $2 = g k tanh(k H ).
(4.7)
Le onde descritte dalla relazione (4.7) sono dispersive, con le onde corte che viaggiano
più lentamente delle onde lunghe. Nel limite di profondità infinita (k H → ∞) si ha $2 =
g k. Nel limite opposto, per acqua poco profonda, (k H → 0) si ha $2 = k 2 g H e le onde
non sono più dispersive, ma viaggiano tutte alla stessa velocità. Nei casi intermedi la
velocità di propagazione diminuisce con la profondità, per cui, durante l’avvicinamento
alla costa, se il profilo del fondale è sufficientemente regolare, le linee di cresta tendono
ad allinearsi alle isolinee di profondità (fig. 6). L’espressione completa della soluzione è:
η(x, t ) = η 0 cos(kx − $t ),
cosh k(z + H )
gk
u(x, z, t ) = u 0
cos(kx − $t ), dove u 0 = η 0
,
cosh k H
$
gk
sinh k(z + H )
sin(kx − $t ), dove w 0 = η 0
,
w(x, z, t ) = w 0
cosh k H
$
cosh k(z + H )
p(x, z, t ) = p 0
cos(kx − $t ), dove p 0 = η 0 g %.
cosh k H
Si noti che mentre velocità orizzontale e pressione sono in fase con l’elevazione, la velocità verticale è in anticipo di π2 . Il moto delle particelle (fig. 7) di fluido segue quindi
delle ellissi, la cui ampiezza diminuisce con la profondità, con il rapporto fra i moduli
W0 e U0 delle due componenti della velocità dato da:
W0
= tanh [k(z + H )] .
U0
39
ONDE LINEARI
Figura 7: Traiettorie degli elementi di fluido in un’onda di garvità in acqua profonda ed acqua
bassa.
La pressione non è idrostatica ma si attenua esponenzialmente con la profondità (in
acqua profonda) con un tasso di diminuzione più accentuato per le onde corte.
4.2
ONDE DI POINCARÈ–SVERDRUP
Un modo per ottenere le soluzioni ondulatorie consiste nel manipolare le equazioni e
riscriverle nella sola variabile η. A tal fine si sommano la derivata rispetto a x della (4.1a)
e la derivata rispetto a y della (4.1b) ottenendo:
µ
¶
µ
¶
µ 2
¶
∂ ∂u ∂v
∂u ∂v
∂ η ∂2 η
+
+f
−
= −g
+
∂t ∂x ∂y
∂y ∂x
∂x 2 ∂y 2
e si sottrae la derivata rispetto a x della (4.1b) dalla derivata rispetto ad y della (4.1a)
ottenendo l’equazione della vorticità
µ
¶
µ
¶
∂ ∂u ∂v
∂u ∂v
−
=f
+
.
(4.8)
∂t ∂y ∂x
∂x ∂y
Le due equazioni combinate assieme consentono di eliminare la vorticità ottenendo
un’equazione per η e la divergenza della velocità. Se il fondo è piatto, cioè H = costante,
la divergenza è proporzionale alla derivata dell’elevazione:
∂u ∂v
1 ∂η
+
=−
.
∂x ∂y
H ∂t
Risulta quindi un’equazione per la sola η:
·
µ 2
¶¸
∂ ∂2 η
∂ η ∂2 η
2
+ f η−gH
+
= 0.
∂t ∂t 2
∂x 2 ∂y 2
(4.9)
Sostituendo nell’eq. (4.9) la soluzione ondulatoria η = η 0 ei (kx+l y−$t ) si ottiene la relazione di dispersione per le onde di Poincarè–Sverdrup:
$2 = f 2 + g H (k 2 + l 2 ).
40
(4.10)
4.3 O N D E D I K E LV I N
Le onde sono dispersive, hanno sempre frequenza maggiore di f , e quindi non rappresentano moti
p geostrofici. Se la loro lunghezza d’onda è molto inferiore al raggio di RosgH
sby R R = f allora il parametro di Coriolis è trascurabile, le onde non risentono della
rotazione e non sono dispersive.
Per individuare il tipo di moto, si consideri un sistema di riferimento orientato nella
direzione di propagazione dell’onda (l = 0). In tale sistema le equazioni si semplificano
e sostituendo nelle equazioni la soluzione ondulatoria (η 0 , u 0 , v 0 )ei (kx−$t ) si ottiene:
¯ ¯
¯ u0 ¯ $
¯ ¯= ,
¯v ¯ f
0
arg(v 0 ) = arg(u 0 ) +
π
.
2
Pertanto gli elementi di fluido percorrono in senso orario (se f > 0) delle ellissi con l’asse
maggiore orientato nella direzione di propagazione dell’onda. Il rapporto fra gli assi
dell’ellisse vale $f ed è eguale ad 1 quando le onde hanno la frequenza minima f (onde
inerziali). In tale caso il moto segue orbite circolari ed è determinato dalla sola forza di
Coriolis, senza alcun contributo della pressione.
4.3
O N D E D I K E LV I N
La presenza di un limite sul dominio di integrazione, ossia di una costa, permette una
soluzione dalle caratteristiche particolari, detta onda di Kelvin, in cui la componente
della velocità parallela alla costa è identicamente nulla. Per semplicità, il sistema di riferimento si considera orientato con l’asse y parallelo alla costa, che costituisce il bordo
destro del bacino. Se u ≡ 0 allora le equazioni del moto quasi–piano diventano:
∂η
,
∂x
∂v
∂η
= −g
,
∂t
∂y
∂v
∂η
+H
= 0.
∂t
∂y
fv =g
(4.11a)
(4.11b)
(4.11c)
La soluzione cercata è del tipo η 0 φ(x)ei (k y−$t ) , cioè è periodica in y, ma ha una struttura
in x, che deve essere determinata dalla dinamica del moto.
Le eq.(4.11) si riducono ad una equazione nella sola η:
∂2 η
∂t 2
=gH
∂2 η
∂y 2
,
(4.12)
da cui segue la relazione di dispersione
$2 = g H k 2 .
(4.13)
La relazione di dispersione dell’onda di Kelvin è eguale a quella delle onde di Poincarè–
Sverdrup nel limite per raggio di Rossby grande rispetto alla lunghezza d’onda. Sono possibili onde di Kelvin di qualsiasi frequenza e pertanto le onde di Kelvin rappresentano le
risposte a forzanti di frequenza troppo bassa per generare le onde di Poincarè–Sverdrup
41
ONDE LINEARI
e troppo alta per generare le onde di Rossby. I principali esempi sono le forzanti mareali,
che hanno periodi concentrati in due intervalli centrati attorno alle 12 h e 24 h.
La struttura trasversale dell’onda di Kelvin viene determinata dalla (4.11a). Sostituendo in essa la soluzione ondulatoria trovata si ottiene:
f sign(k)
φ(x),
φ0 (x) = p
gH
da cui φ(x) = exp
µ
f sign(k)
p
gH
¶
x . Mentre in direzione parallela alla costa l’onda di Kelvin è
sinusoidale, nella direzione trasversale cresce esponenzialmente e tale crescita è interrotta dalla presenza della costa. La soluzione con k < 0 diverge e non è accettabile. Se
invece il bacino fosse limitato da una costa sul bordo sinistro non sarebbe accettabile
la soluzione con k > 0. Pertanto l’onda di Kelvin si propaga sempre tenendo la costa a
destra.
La rotazione, anche se non appare nella relazione di dispersione, ha un ruolo fondamentale nell’onda di Kelvin. La componente non nulla della velocità è infatti in bilancio geostrofico, e la tendenza della forza di Coriolis a indurre nel fluido una velocità
trasversale è bilanciata esattamente dal gradiente di pressione.
4.4
ONDE DI ROSSBY
L’onda di Rossby è estremamente importante in geofisica. Infatti essa mostra come siano possibili moti ondulatori in bilancio geostrofico e spiega l’evoluzione dei vortici di
grande scala del fluido. Essa consegue dalle equazioni della quasi-geostrofia e la sua
dinamica è spiegata in modo semplice dalla conservazione della vorticità potenziale e
dalla divergenza del trasporto geostrofico nel piano β (vedasi prossima sezione).
Le onde di Poincarè-Sverdrup costituiscono la sola soluzione possibile delle equazioni del moto quasi-piano in assenza di coste. Se però il fondale non è piatto o si
adotta l’approssimazione piano-β, allora delle nuove soluzioni diventano possibili. Ripetendo il procedimento seguito per le onde di Poincarè–Sverdrup, ma considerando
H = H0 + γy, f = f 0 + βy, si ottiene
µ
¶
µ
¶
µ 2
¶
∂ ∂u ∂v
∂u ∂v
∂ η ∂2 η
+
−
+
,
+f
+ βu = −g
∂t ∂x ∂y
∂y ∂x
∂x 2 ∂y 2
µ
¶
µ
¶
∂ ∂u ∂v
∂u ∂v
−
− βv = f
+
, (4.14)
∂t ∂y ∂x
∂x ∂y
che utilizzando
∂u ∂v
1 ∂η
+
=−
− γv
∂x ∂y
H0 ∂t
si riduce a
∂
∂t
42
·
∂2 η
∂t 2
2
+ f η − g H0
µ
∂2 η
∂x 2
+
∂2 η
∂y 2
¶¸
− βH0
µ
¶
µ 2
¶
∂u
∂ v
2
+ f v +γ
+ f v = 0.
∂t
∂t 2
(4.15)
4.4 O N D E D I R O S S B Y
Per moti lenti, ossia $ ¿ f , la (4.15) si semplifica in
∂
∂t
·
2
f η − g H0
µ
∂2 η
∂x 2
+
∂2 η
¶¸
∂y 2
¶
γf
+ H0 f
− β v = 0.
H0
µ
(4.16)
fγ
Introduciamo ora βT = β − H0 ; osserviamo che la (4.16) contiene ancora l’incognita v
che non è stata espressa in funzione di η. Per moti a bassa frequenza vale però il bilancio
g ∂η
geostrofico, e quindi v = f ∂x e quindi si ha un’equazione per la sola η:
∂
∂t
·
f 2 η − g H0
µ
∂2 η
∂x
2
+
∂2 η
∂y
¶¸
2
− βT g H 0
∂η
= 0.
∂x
(4.17)
Sostituendo nell’eq. (4.17) la soluzione ondulatoria si ottiene la relazione di dispersione dell’onda di Rossby:
µ
¶
k
kβT
2
2
2
= 0 =⇒ $ = −R R2
f + g H 0 k + l + βT
.
(4.18)
2
$
1 + R R (k 2 + l 2 )
Vi sono due limiti della relazione di dispersione: per lunghezze d’onda molto più grandi
del raggio di Rossby, k 2 1+l 2 À R R2 , e per numeri d’onda molto piccoli. Per onde di Rossby
lunghe si ottiene
$ = −R R2 βT k;
per onde di Rossby corte si ottiene
$ = −βT
k
.
k2 + l 2
In entrambi i casi la velocità di fase è negativa, mentre la velocità di gruppo è positiva
per onde corte e negativa per onde lunghe.
L’onda di Rossby può essere identificata anche dalla conservazione della vorticità potenziale, prendendone il limite lineare e cercandone soluzioni ondulatorie che verifichino il bilancio geostrofico.
4.4.1 Dinamica dell’onda di Rossby
Il moto dell’onda di Rossby si presta a due diverse interpretazioni corrispondenti ai due
limiti per onde lunghe e corte.
Si consideri il limite ad onde lunghe in presenza di un gradiente di vorticità ambientale, ad esempio l’aumento di vorticità planetaria in direzione meridionale. Nel limite onde lunghe il ruolo dell’elevazione superficiale, ossia dello stiramento-compressione dei
tubi di vorticità è trascurabile e la superficie superiore del fluido si può assumere piana.
Se una colonna di fluido nella posizione x 0 viene spostata in direzione del gradiente di
vorticità orientato come l’asse ŷ, poiché aumenta la propria vorticità ambientale, diminuisce la propria vorticità relativa, cioè acquisisce la tendenza a ruotare in verso orario.
Il moto che ne segue sposta le adiacenti colonne di fluido, in posizione x 0 +∆x e x 0 −∆x,
in direzione parallela al gradiente della vorticità ambientale. Conseguentemente, tali
43
ONDE LINEARI
Figura 8: Meccanismi di evoluzione dell’onda lunga (a sinistra) e corta (a destra) di Rossby.
colonne di fluido acquisiscono una vorticità relativa di segno tra di loro opposto. Il moto che ne segue riporta la colonna x 0 verso la sua posizione originaria lungo ŷ e muove
lungo la stessa direzione altre colonne adiacenti determinando un moto ondulatorio
(vedasi fig.8).
Se viceversa le onde sono corte la deviazione della superficie del fluido dalla posizione di equilibrio ha il ruolo fondamentale. Se, in presenza di un moto convergente si
crea, localmente, un’elevazione, per il bilancio geostrofico ad essa è associata una circolazione antioraria. A causa dell’effetto β la circolazione risultante è meno intensa nella
direzione dove la vorticità ambientale è maggiore. Pertanto si creano ai lati est ed ovest
dell’elevazione una zona di divergenza e di convergenza, che producono una depressione ed una elevazione della superficie. Le circolazioni geostrofiche associate a tali due
deformazioni, producono, per via dell’effetto β, una divergenza nella regione fra essa
compresa, per cui l’elevazione che vi era in precedenza collocata scompare ed iniziano
una serie di oscillazioni (vedasi fig.8).
44
Parte II
MODELLISTICA NUMERICA
5
INTEGRAZIONE NUMERICA DI P D E
5.1
PREMESSA: METODO ALLE DIFFERENZE FINITE
Sia data una funzione f (x) continua; definiamo f i = f (x i ), con x i successione monotona strettamente crescente in R (con passo eventualmente non costante). Si ipotizza
che il passo sia tale da poter considerare lineare la funzione tra x i e x i +1 (poiché non ci
sono informazioni specifiche, non ha senso andare oltre
il´ primo ³ordine). ´Pertanto per
³
f −f
−x 0
−x 0
x ∈ (x i −1 , x i ) si ha f (x 0 ) ≈ f i + i ∆xi −1 (x 0 − x i −1 ) = f i xi∆x
+ f i −1 1 − xi∆x
≡ α(x 0 ) f i +
(1 − α(x 0 )) f i −1 , dove abbiamo adoperato l’approssimazione lineare per stimare f 0 . Per
j
P
(±²) j ∂ f (x)
valutare l’entità dell’errore, dallo sviluppo di Taylor f (x ± ²) = f (x) + ∞
j , per
j =1 j !
cui f i −1 ≈ f (x 0 ) − ∆x 1 f 0 (x 0 ) +
∆x 12
2
∂x
∆x 22 00 0
f
(x
), ∆x 1 =
2
∆x 1 ∆x 2 00 0
f (x ), per cui
2
f 00 (x 0 ) mentre f i ≈ f (x 0 ) + ∆x 2 f 0 (x 0 ) +
f ∆x + f
∆x
x 0 − x i −1 , ∆x 1 + ∆x 2 = ∆x, da cui si ottiene i 1 ∆xi −1 2 ≈ f (x 0 ) +
l’errore è dell’ordine di ∆x 2 , è nullo agli estremi ed è massimo al centro dell’intervallo.
Le serie di Taylor permettono di disporre di una approssimazione della funzione e
∂f
delle sue derivate: da f i −1 = f i − ∆x ∂x (x i ) + ∆x2
2
∂2 f
(x ) + O(∆x 2 )
∂x 2 i
∂f
∂x
(x i ) =
2
∂
f
∂
f
f
−
f
i −1
i
+ ∆x
a meno di ordini superiori in ∆x.
2 ∂x 2 (x i ), ovvero ∂x (x i ) = ∆x
2
3
x i +x i −1
f 0 (x̄) + ∆x8 f 00 (x̄) ∓ ∆x
f 000 (x̄) ⇒
Se consideriamo x̄ = 2 , allora f i − 1 ∓ 1 ≈ f (x̄) ∓ ∆x
2
48
2 2
3
f −f
0
000
(x̄) = i ∆xi −1 + ∆x
24 f (x̄), ovvero l’errore va a zero più rapidamente e dunque possiamo
f i − f i −1
∆x
si ottiene che
f
pensare di introdurre una griglia sfasata che permetta il calcolo delle derivate con una
buona approssimazione.
2
3
∆x 4 (4)
000
Se ora consideriamo la derivata seconda, f i ±1 ≈ f i ± ∆x f i0 + ∆x2 f i00 ± ∆x
3! f i + 4! f i ,
(4)
2
da cui f i00 ≈ i +1 ∆xi2 i −1 − ∆x
12 f i , ovvero l’errore scala come ∆x . Solitamente questa
approssimazione viene ritenuta sufficiente.
Per le derivate superiori possiamo formalmente scrivere
f
−2 f + f
.
..
..
..
.
.
1 −2∆x 2∆x 2
∆x 2
1 −∆x
2
0
0
1
∆x 2
1
∆x
2
1 2∆x 2∆x 2
..
..
..
.
.
.
|
{z
A
2
..
. f i
..
.. 0
f .
.
i00 f
f i −2
..
i
.
f 000 f i −1
.. i(4)
. f = f i ,
i
.. f (5) f i +1
. i
(6) f i +2
.. f i
..
.
..
.
.
..
.
}
per cui il problema si riduce all’inversione della matrice A. Per procedere si può utilizzare, ad esempio, il metodo di Gauss: scrivendo la matrice (Ak1), dove 1 è la matrice
47
INTEGRAZIONE NUMERICA DI PDE
identità, si può passare tramite una serie di combinazioni lineari tra righe, alla matrice
(1kB ): allora B = A −1 .
5.2
ONDE IN UNA DIMENSIONE
L’equazione
∂f
∂f
+c
=0
∂t
∂x
(5.1)
descrive la propagazione di un’onda piana unidirezionale in un mezzo le cui proprietà
variano su una scala alquanto maggiore della lunghezza d’onda, come può essere un’onda marina in acqua bassa in un canale di profondità variabile in modo lento e regolare
(in modo che la velocità di propagazione c possa essere supposta costante). Tale equazione rappresenta il più semplice esempio di PDE (Partial Differential Equation) iperbolica. Una soluzione analitica della (5.1) con condizione iniziale f (x, 0) = Aei kx è data
da f (x, t ) = Aei k(x−c t ) . La soluzione numerica con i metodi alle differenze finite si basa
sulla sostituzione delle derivate in forma continua con rapporti incrementali di tipo
∂f
∆f
≈
,
∂x
∆x
basati sulla sostituzione della variabile continua con una sua rappresentazione discreta, f (x, t ) → f jn = f (x 0 + j ∆x, t 0 + n∆t ). La soluzione consiste nel calcolare i valori di
f jn in successione per n = 1, . . . , N , a partire dalla condizione iniziale f (x, 0) → f j0 =
f (x 0 + j ∆x, 0), fino a coprire l’intero intervallo di integrazione. La rappresentazione delle derivate può essere effettuata in modi diversi. Indicando con i l’indice sulla nostra
variabile e con j gli indici sulle altre si ha:
∂f
C E N T E R E D ∂x
∂f
F O R W A R D ∂x
=
=
∂f
B A C K W A R D ∂x
f i +1, j − f i −1, j
2∆x
f i +1, j − f i , j
∆x
=
+ O(∆x 2 );
+ O(∆x);
f i , j − f i −1, j
∆x
+ O(∆x);
analogamente si procede per t . La scelta della rappresentazione determina le proprietà
dello schema numerico.
Una proprietà fondamentale per lo schema numerico è la sua stabilità, ossia la proprietà di fornire soluzioni finite (non divergenti) a seguito della sua iterazione. Il teorema di Lax assicura che uno schema stabile e consistente (in cui le rappresentazioni delle
derivate convergono all’espressione analitica se il passo di integrazione tende a zero)
converge alla soluzione corretta. La stabilità viene usualmente studiata con il criterio
di von Neumann, consistente nel sostituire alla soluzione l’espressione f jn = ξn ei j k∆x e
verificare che, per ogni valore di n, |ξ| < 1, il che garantisce che la soluzione resta finita. Il fattore di amplificazione ξ caratterizza il comportamento del metodo numerico,
cioè un’alterazione dell’ampiezza o della fase della componente dovuta alla procedura
di integrazione.
48
5.2 O N D E I N U N A D I M E N S I O N E
5.2.1 Schemi di integrazione espliciti
SCHEMA DI INTEGRAZIONE FTCS
Lo schema FTCS (Forward in Time, Centered in
Space) è il caso più semplice ma ha applicazioni pratiche limitate, in quanto è intrinsecamente instabile. Adottando tale schema per la (5.1) si ottiene
f jn+1 − f jn
∆t
+c
f jn+1 − f jn−1
2∆x
= 0,
ossia la formula esplicita per la soluzione è data da
f jn+1
=
f jn −C
f jn+1 − f jn−1
2
,
(5.2)
p
velocità fisica
∆t
|ξ|
= velocità
.
Con
un
po’
di
algebra
si
vede
che
=
dove C = c ∆x
1 +C 2 sin2 k∆x >
numerica
1 ∀k, dunque lo schema è sempre instabile. Per rimediare a questa instabilità, si può
adoperare lo schema di Lax, che è una variazione dell’FTCS: esso consiste nel sostituire
f jn con la sua media tra due punti adiacenti, in modo che la (5.2) diventi
f jn+1
=
f jn+1 + f jn−1
2
−C
f jn+1 − f jn−1
2
,
(5.3)
da cui ξ = cos k∆x − iC sin k∆x e dunque |ξ| ≤ 1 se C ≤ 1. La stabilità, dunque, dipende
dal cosiddetto criterio di Courant o di CFL (Courant–Friedrichs–Lévy):
C=
c∆t
velocità fisica
=
< 1,
∆x
velocità numerica
(5.4)
che impone delle restrizioni sul rapporto ∆x
∆t una volta fissata c. Il criterio CFL è una
condizione ricorrente per la stabilità degli schemi di integrazione numerica di PDE di
tipo iperbolico. Il risultato, apparentemente sorprendente, ha una logica spiegazione
che è evidente se riscriviamo la (5.3) nella forma
f jn+1 = f jn +
f jn+1 − 2 f jn + f jn−1
2
−C
f jn+1 − f jn−1
2
,
che rappresenta in uno schema FTCS l’equazione
∂f
∂f
∂2 f
+c
=ν 2,
∂t
∂x
∂x
ν=
∆x 2
.
2∆t
Lo schema di Lax introduce dunque, in definitiva, un termine diffuso che limita la crescita dell’instabilità.
SCHEMA DI INTEGRAZIONE CTCS O LEAPFROG
Uno schema molto usato è il CTCS
(Centered in Space, Centered in Time) che produce
f jn+1 − f jn−1
2∆t
+c
f jn+1 − f jn−1
2∆x
= 0,
49
INTEGRAZIONE NUMERICA DI PDE
da cui la formula risolutiva
³
´
f jn+1 = f jn−1 −C f jn+1 − f jn−1 ,
p
che fornisce l’equazione ξ2 + 2iC ξ sin k∆x − 1 = 0 ⇒ ξ = −iC sin k∆x ± 1 −C 2 sin2 k∆x.
Se C ≤ 1 il radicando è positivo, la radice reale e |ξ|2 = 1 per ogni valore di k. Se invece
C > 1 esistono valori di k per cui, essendo C 2 sin2 k∆x > 1, il radicando è negativo e la
radice ha solo parte immaginaria. In tal caso
³
´2
p
p
|ξ|2 = −C sin k∆x ± C 2 sin2 k∆x − 1 = 2C 2 sin2 k∆x − 1 ∓ 2C sin k∆x C 2 sin2 k∆x − 1
p
|ξ|2 > 1 ∓ 2C sin k∆x C 2 sin2 k∆x − 1,
e dunque almeno in un caso è maggiore di 1. Similmente alla correzione di Lax all’FTCS,
lo schema CTCS è stabile se la condizione CFL è soddisfatta.
Lo schema CTCS presenta la particolarità che i punti pari e dispari del grigliato computazionale (assimilabili alle caselle bianche e nere di una scacchiera) sono disaccoppiati, ossia la loro integrazione numerica procede in modo indipendente determinando
la possibilità che le due soluzioni numeriche divergano tra loro. Per
³ evitare tale pro´
blema, usualmente si aggiunge all’equazione un termine diffusivo ² f jn+1 − 2 f jn + f jn−1 ,
dove ² ¿ 1 rappresenta un coefficiente arbitrario e piccolo.
Un ulteriore schema è lo schema upwind. Se
f rappresenta la concentrazione di uno scalare generico, c f ne rappresenta il flusso. Lo
schema upwind calcola il tasso di variazione della concentrazione di f nel punto j come
differenza tra flusso entrante e uscente tenendo conto del verso secondo cui avviene la
propagazione
SCHEMA DI INTEGRAZIONE UPWIND
n+1 n
n
n
f j − f j + c f j − f j −1 = 0 se c > 0,
∆t
∆x
n+1
n
f jn+1 − f jn
fj −fj
+
c
= 0 se c ≤ 0,
∆t
∆x
che, nel caso c > 0, si traduce nella formula risolutiva
f jn+1 = (1 −C ) f jn +C f jn−1 ⇒ |ξ| = 1 + 4C (C − 1) sin
k∆x
,
2
ovvero |ξ| > 1 se C > 1. La sostituzione nella prima delle precedenti dello sviluppo in
serie di Taylor di f jn+1 , f jn+1 , f jn−1 al secondo ordine fornisce
∂f
∂f
1 ∂2 f
c ∂2 f
+c
=−
∆t −
∆x,
2
∂t
∂x
2 ∂t
2 ∂x 2
che, se f è soluzione di (5.1), diventa
∂f
∂f
C ∆x ∂2 f
+c
= (C − 1)
.
∂t
∂x
2 ∂x 2
L’equazione realmente risolta dallo schema contiene un supplementare termine diffusivo, che determina la presenza di una diffusione numerica nella soluzione calcolata.
50
5.3 M E T O D I I M P L I C I T I
5.2.2 Dispersione numerica
La discretizzazione spaziale introduce una dispersione numerica che altera la velocità a
cui un’onda si propaga. Questo è già evidente osservando che il fattore di amplificazione
ξ risultante dall’analisi della stabilità è caratterizzato non solo da un modulo ma anche
da una fase, che, a parte il caso che speciale in cui ξ = 1, implica una dipendenza da
k nella propagazione di onde che in base alla soluzione analitica sono non dispersive.
Questo errore degli schemi numerici deriva dalla discretizzazione spaziale. Ad esempio
scrivendo la (5.1) come
∂fj
∂t
+c
f j +1 − f j −1
2∆x
f j = F (t )ei k j ∆x ,
= 0,
risulta
∂fj
∂t
+ i k c̃ f j = 0,
c̃ = c
sin k∆x
,
k∆x
(5.5)
che mostra come solo le onde lunghe si propaghino con la velocità corretta c.
5.3
METODI IMPLICITI
Gli schemi risolutivi presentati fino ad ora sono detti espliciti, in quanto il calcolo del
livello temporale incognito n + 1 avviene mediante una semplice combinazione algebrica dei valori della funzione incognita al livello temporale noto n. Se si utilizza il livello
temporale incognito n + 1 anche nel calcolo della derivata spaziale mediante la media
pesata dei livelli temporali n ed n + 1 la situazione si complica:
f jn+1 − f jn
∆t
+c
³
´
³
´
n+1
n
n
ω f jn+1
−
f
+
(1
−
ω)
f
−
f
+1
j −1
j +1
j −1
2∆x
= 0,
dove se ω = 0 si ha lo schema esplicito FTCS, mentre se ω = 1 lo schema si dice completamente implicito mentre se ω = 21 è detto semi-implicito. Il vantaggio degli schemi
impliciti è la loro stabilità senza la necessità di soddisfare il criterio di Courant. L’analisi
di von Neumann nel caso completamente implicito fornisce
ξ=
1 − iC
2 sin k∆x
1 + iC
2 sin k∆x
,
¡
¢
che, posto θk = arctan C2 sin k∆x , diventa ξ = e−2i θk , ovvero |ξ| = 1. Comunque, poiché
la stabilità non implica l’accuratezza della soluzione numerica, il passo di integrazione
temporale non può essere scelto arbitrariamente grande. Inoltre l’integrazione con metodi impliciti richiede la soluzione di un sistema algebrico lineare, ovvero l’inversione di
una matrice tridiagonale. Si consideri il caso semi-implicito, che si può scrivere come
f jn+1 − f jn +C
f jn+1 − f jn−1 + f jn+1
− f jn+1
+1
−1
4
=0
51
INTEGRAZIONE NUMERICA DI PDE
ed in forma matriciale AF (n+1) = −B F (n) , dove
C
−1
0 0 ···
1
4
C
C
C
1
0
·
·
·
−
− 4
4
4
B =
A=
0
0 − C 1 C · · · ,
4
4
..
..
..
.. . .
..
.
.
.
.
.
.
C
4
−1
− C4
..
.
0
C
4
−1
..
.
0
0
C
4
..
.
···
· · ·
· · · ,
..
.
che si risolve ponendo F (n+1) = −A −1 B F (n) , cioè mediante il calcolo dell’inverso della
matrice A.
5.4
E QUA Z I O N E D I D I F F U S I O N E
Consideriamo ora l’equazione che descrive un processo diffusivo in una dimensione
∂f
∂2 f
=ν 2.
∂t
∂x
(5.6)
Essa rappresenta il caso più semplice di una categoria di equazioni denominate paraboliche ed è fondamentale nei processi ambientali che descrivono la diffusione di calore
o di una generica quantità scalare per effetti molecolari o di turbolenza (salinità, componenti della quantità di moto, concentrazioni di componenti chimiche o popolazioni
biologiche. . . ).
5.4.1 Schema FTCS
Lo schema FTCS per la sua integrazione è
f jn+1 − f jn
∆t
=ν
f jn+1 − 2 f jn + f jn−1
∆x 2
dove si è usata l’approssimazione
dunque
∂2 f
∂x 2
,
=
f jn+1 −2 f jn + f jn−1
f jn+1 = (1 − 2D) f jn + D( f jn+1 + f jn−1 ),
∆x 2
D =ν
+ O(∆x 2 ); dall’equazione si ottiene
∆t
.
∆x 2
La consueta analisi di stabilità di von Neumann restituisce ξ = 1 − 4D sin2 k∆x
2 , per cui lo
1
schema è stabile se D ≤ 2 , cioè se il passo di integrazione è inferiore alla metà del tempo
caratteristico in cui il segnale diffonde lungo la distanza ∆x.
5.4.2 Schemi impliciti di integrazione
Uno schema completamente implicito
³
´
n+1
f jn+1 − f jn = D f jn+1
+ f jn+1
+1 − 2 f j
−1
fornisce ξ =
1
1+4D sin2
k∆x
2
che ha modulo minore di 1 ∀D e dunque è sempre stabile. Lo
schema intermedio tra quello completamente implicito e quello esplicito si ottiene con
52
5.5 S TA G G E R I N G E G R I G L I E M U LT I D I M E N S I O N A L I
il calcolo della derivata seconda media fra livelli temporali n ed n + 1. Tale schema è
incondizionatamente stabile ed è detto di Crank–Nicholson:
Ã
!
f jn+1 − 2 f jn + f jn−1
− 2 f jn+1 + f jn+1
f jn+1 − f jn ν f jn+1
+1
−1
+
=
,
∆t
2
∆x 2
∆x 2
da cui, infatti, |ξ| =
1−2D sin2
1+2D sin2
k∆x
2
k∆x
2
≤ 1 ∀D. Come discusso in precedenza, si pone tuttavia il
problema dell’inversione della matrice tridiagonale.
Il caso completamente implicito in una dimensione è un esempio di problema algebricamente gestibile in modo poco dispendioso. Consideriamo
³
´
n+1
f jn+1 − f jn = a j f jn+1
+ f jn+1
+1 − 2 f j
−1 ,
i ∆t
dove a i = ν∆x
2 sono gli elementi della matrice tridiagonale che dovrebbe essere invertita,
mentre νi indica una generica dipendenza del coefficiente di diffusione dallo spazio. La
precedente si riscrive
αi =
ai
1 + a i + a i −1 (1 − αi −1 )
,
βi =
f in+1 = αi f in+1
+1 + βi ,
(5.7a)
,
(5.7b)
a i −1 βi −1 +
f in
1 + a i + a i −1 (1 − αi −1 )
che, fissati i valori α1 e β1 , fornisce una procedura sequenziale per il calcolo in ordine
di i crescente. L’equazione (5.7a) permette di calcolare f in+1 in ordine di i decrescente e
l’equazione viene risolta evitando l’inversione algebrica di una matrice tridiagonale.
5.4.3 Onde in presenza di diffusione
L’equazione delle onde in presenza di diffusione è
n+1
f jn+1 − f jn−1
− f jn
f jn+1 − 2 f jn + f jn−1
∂f
∂f
∂2 f FTCS f j
−
c
+c
= ν 2 −−−→
=ν
∂t
∂t
∆t
∆x 2
2∆x
∂x
n
³
´
f j +1 − f jn−1
⇒ f jn+1 = f jn − C
+ D f jn+1 − 2 f jn + f jn−1 . (5.8)
2
Dall’analisi della stabilità ξ = 1 − iC sin k∆x − 2D(1 − cos k∆x) ⇒ |ξ| ≤ 1 purché siano
soddisfatte le condizioni C 2 ≤ 2D ≤ 1. La presenza di diffusione rende stabile dunque
uno schema che, applicato all’onda semplice, era instabile.
Uno schema implicito per la diffusione
f jn+1 = f jn −C
fornisce ξ =
5.5
f jn+1 − f jn−1
2
³
´
n+1
+ D f jn+1
+ f jn+1
+1 − 2 f j
−1 ,
1−iC sin k∆x
|ξ| ≤ 1 ∀D,C .
1+2D(1−cos k∆x) , per cui
S TA G G E R I N G E G R I G L I E M U LT I D I M E N S I O N A L I
Le equazioni considerate fino ad ora rappresentano dei paradigmi di riferimento che
in realtà hanno limitato interesse pratico. Questa sezione ha l’obiettivo di avvicinarsi
53
INTEGRAZIONE NUMERICA DI PDE
maggiormente a casi di interesse geofisico in cui siano richiesti e correntemente applicati schemi numerici. Le equazioni shallow-water (4.1) costituiscono da un lato la base
su cui costruire schemi tridimensionali più complessi, dall’altro si prestano a modelli
numerici barotropici (intesi in modo semplicistico come modelli monostrato) di circolazione con cui si possono descrivere tsunami, inondazioni costiere, maree, e che sono
stati anche utilizzati per i primi modelli di circolazione generale.
5.5.1 Equazioni shallow-water monodimensionali
Le equazioni shallow-water in una dimensione accoppiano l’evoluzione del livello della
superficie η del fluido a quella della velocità u in base al bilancio di volume e pressione
idrostatica. In assenza di termine di Coriolis esse sono
∂η
∂u
+H
= 0,
∂t
∂x
∂u
∂η
+g
= 0,
∂t
∂x
(5.9)
dove H è la profondità del fluido, g l’accelerazione di gravità; le precedenti forniscono
p
come soluzione onde non dispersive con velocità c = g H in entrambi i versi.
L’integrazione delle equazioni (5.9) può essere effettuata con gli schemi di integrazione FTCS-Lax o CTCS. In entrambi i casi lo schema è stabile se il criterio CFL è soddisfatto. L’introduzione della discretizzazione spaziale introduce una dispersione numerica
simile a (5.5).
Il trasferimento delle equazioni shallow-water su una griglia computazionale evidenzia i vantaggi di introdurre griglie sfasate (staggered) dove ogni variabile dipendente è
calcolata in punti diversi. Se η ed u sono calcolate su due griglie diverse, ciascuna con
passo ∆x ma fra loro sfasate di ∆x
2 , le differenze centrate nello spazio possono essere calu nj+1 −u nj
ηnj −u nj−1
colate come ∆x e ∆x nei punti j dove sono richieste le derivate temporali di η
ed u. In questo modo si raddoppia la precisione nel calcolo delle derivate spaziali senza
aumentare il costo computazionale.
5.5.2 Onde in griglie multidimensionali
L’equazione delle onde in due dimensioni ha la forma
∂f
∂f
∂f
+ cx
+ cy
= 0;
∂t
∂x
∂y
l’analisi di von Neumann impone una forma di soluzione del tipo f jn,l = ξn ei (k x j +k y l )∆ ,
dove ∆ = ∆x = ∆y. Lo schema di integrazione FTCS-Lax restituisce
f jn+1
,l =
f jn+1,l + f jn−1,l + f jn,l +1 + f jn,l −1
4
−C x
f jn+1,l − f jn−1,l
2
C x = cx
−C y
∆t
,
∆
f jn,l +1 − f jn,l −1
2
Cy = cy
,
∆t
, (5.10)
∆
¡
¢
cos k x ∆+cos k y ∆
da cui ξ =
− i C x sin k x ∆ +C y sin k y ∆ . Con un po’ di algebra si ha
2
¡
¢2
·
´¸
¡
¢2 ¡
¢ 1 ³ 2
cos k x ∆ + cos k y ∆
2
|ξ| = 1−
− C x sin k x ∆ +C y sin k y ∆ − sin2 k x ∆ + sin2 k y ∆
− C x +C y2 ,
4
2
54
5.5 S TA G G E R I N G E G R I G L I E M U LT I D I M E N S I O N A L I
per cui lo schema è stabile se C x2 + C y2 ≤ 21 , ossia
lare della relazione generale in N dimensioni
v
uN
X
1
∆t u
t c 2,
C≤p ,
C=
∆ i =1 i
N
p q 2
2 c x + c y2 ≤
∆
∆t ,
che è un caso partico-
(5.11)
dove c i sono le componenti della velocità di propagazione delle onde. Si noti che rispetto al caso monodimensionale, in N dimensioni la condizione di Courant è più restrittiva
p
per via del termine N .
5.5.3 Diffusione in griglie multidimensionali
L’equazione di diffusione in due dimensioni diventa
µ 2
¶
∂f
∂ f ∂2 f
=ν
+
;
∂t
∂x 2 ∂y 2
(5.12)
la sua integrazione sulla base di uno schema esplicito fornisce
³
´
f jn+1 − f jn = D δ2x f jn,l + δ2y f jn,l ,
D =ν
∆t
,
∆2
δ2x f jn,l = f jn+1,l − 2 f jn,l + f jn−1,l ,
δ2y f jn,l = f jn,l +1 − 2 f jn,l + f jn,l −1 .
L’analisi di von Neumann restituisce come criterio di stabilità D ≤ 41 , che nel caso N 1
.
dimensionale diventa D ≤ 2N
Utilizzando il metodo di Crank–Nicholson per integrare la (5.12) si ottiene
f jn+1 − f jn = D
δ2x f jn+1
+ δ2x f jn,l + δ2y f jn+1
+ δ2y f jn,l
,l
,l
,
2
che sarebbe associata ad una matrice non più tridiagonale ma con termini più diffusi,
detta pentadiagonale, che dovrebbe essere invertita.
Un’alternativa, che permette di ridurre il problema all’inversione di una matrice tridiagonale, è quello di separare il passo di integrazione in due semipassi (se siamo in N
dimensioni, il passo viene diviso in N parti), dove viene calcolato in modo semimplicito
un solo contributo alla volta, mentre i rimanenti restano espliciti. Ad esempio in due
dimensioni
n+ 12
f jn+1 − f j
n+ 12
=D
δ2x f j ,l
+ δ2y f jn+1
,l
.
2
Come lo schema di Crank–Nicholson, anche questo si prova essere incondizionatamente stabile.
5.5.4 Equazioni di shallow-water, forza di Coriolis e griglie di Arakawa
Un fattore fondamentale nelle equazioni per i fluidi geofisici è la forza di Coriolis, che
introdotta nelle equazioni fornisce come abbiamo visto
µ
¶
∂u ∂v
∂u
∂η
∂v
∂η
∂η
+H
+
= 0,
− f v +g
= 0,
+ f u+g
= 0.
∂t
∂x ∂y
∂t
∂x
∂t
∂y
55
INTEGRAZIONE NUMERICA DI PDE
A
B
C
n1
n
1
2
n
j
j + ½
j
j
D
j + ½
j
j + ½
j
E
u
n1
n
j
1
2
v
n
η
j
j + ½
j
j
j + ½
j
Figura 9: Griglie di Arakawa.
La discretizzazione di queste equazioni su un grigliato a passo costante può essere attuata con cinque diverse modalità, chiamate griglie di Arakawa, indicate con A , B , C , D, E
(fig. 9). Ad esempio nella griglia A le tre variabili dipendenti sono calcolate in punti coincidenti, nella griglia B u e v sono sfasate di mezzo passo di griglia rispetto ad η eccetera.
Le prestazioni di uno schema numerico dipendono dall’efficienza con cui esso consente
di calcolare le variabili dipendenti e le loro derivate (evitando di ricorrere ad interpolazioni spaziali) che sono richieste per l’avanzamento temporale della soluzione. Nessuno
schema consente di evitare interpolazioni e tutte implicano delle deviazioni della dispersione numerica rispetto a quella esatta delle onde. Ad esempio la griglia B è ottimale per
il calcolo dei termini di Coriolis, ma non per quello del gradiente di pressione; la griglia
C verifica esattamente le esigenze contrarie.
5.6
B O U N D A RY VA L U E P R O B L E M S
I problemi affrontati fino ad ora vengono classificato come iperbolici o parabolici e richiedono il calcolo simultaneo dei valori della funzione incognita ad un nuovo livello
temporale in funzione di quelli al livello temporale precedente e noto; essi sono inoltre
problemi caratterizzati da una condizione iniziale. La classe di problemi complementare viene detta delle equazioni ellittiche e richiede il calcolo di una soluzione che verifichi
l’equazione differenziale all’interno di un dominio sul cui bordo sono definite delle condizioni al contorno: in questo caso la soluzione deve essere calcolata simultaneamente
su tutti i punti del dominio. Nel caso dei problemi alle condizioni iniziali è in generale
importante la stabilità della soluzione e l’ottimizzazione del passo temporale adottato.
Nel caso di problemi alle condizioni al contorno è in generale importante la velocità con
cui l’algoritmo (di natura iterativa) converge verso la soluzione finale.
56
5.6 B O U N D A R Y V A L U E P R O B L E M S
Il paradigma delle equazioni di natura ellittica è rappresentato dall’equazione di Poisson
∂2 f
∂x
2
+
∂2 f
∂y 2
= %(x, y),
(5.13)
che in termini di differenze finite diventa
f i +1, j − 2 f i , j + f i −1, j
∆x 2
+
f i , j +1 − 2 f i , j + f i , j −1
∆y 2
= %i , j + O(∆x 2 , ∆y 2 ).
(5.14)
I metodi risolutivi di natura iterativa si basano su una procedura del tipo f ik+1
= f ik, j +c ik, j ,
,j
secondo la solita notazione con l’accortezza che k questa volta indicizza le iterazioni e
non il tempo. La relazione permette di trovare la soluzione all’iterazione k + 1 in funzione del valore noto al passo precedente mediante un termine correttivo: la convergenza è verificata quando il termine correttivo diventa minore di una quantità prefissata
sufficientemente piccola.
I metodi iterativi più usati per risolvere le equazioni ellittiche sono i metodi di Jacobi,
di Gauss–Seidel e SOR (Successive Over Relaxation)
L’equazione (5.14) può essere riscritta esplicitando il valore nel
punto i , j in funzione dei punti adiacenti
¶
µ
f i +1, j + f i −1, j f i , j +1 + f i , j −1
1
1
+
+ %i , j ,
fi , j =
2 12 + 12
∆x 2
∆y 2
METODO DI JACOBI
∆x
∆y
che può essere interpretata come una relazione per il calcolo di f all’iterata k + 1 in
funzione dei valori all’iterata k. Il metodo così ottenuto è detto metodo di Jacobi:
à k
!
f i +1, j + f ik−1, j f ik, j +1 + f ik, j −1
1
1
k+1
fi , j =
+
+ %i , j .
(5.15)
2 12 + 12
∆x 2
∆y 2
∆x
∆y
M E TO D O D I G AU S S – S E I D E L
Il metodo di Gauss–Seidel consiste in una variante del
metodo di Jacobi, in cui nel membro di destra vengono inseriti, al posto di f k , i valori
corrispondenti f k+1 se disponibili. Ad esempio, se l’integrazione procede lungo righe,
cioè aumentando i a j fissato, i valori nei punti (i −1, j ) e (i , j −1) sono già stati calcolati
quando si raggiunge il punto (i , j ) e pertanto si può scrivere
à k
!
f i +1, j + f ik+1
f ik, j +1 + f ik+1
1
1
−1,
j
,
j
−1
f ik+1
+
+ %i , j .
,j =
2 12 + 12
∆x 2
∆y 2
∆x
∆y
Un ulteriore schema si ottiene considerando l’espressione (5.15) come una stima virtuale intermedia da utilizzare assieme al valore precedente in una media pesata di f ik+1
:
,j
f ik+1
,j
= (1 − ω)φk+1
i,j +
ω
2
1
1
∆x 2
+ ∆y1 2
Ã
f ik+1, j + f ik+1
−1, j
∆x 2
+
f ik, j +1 + f ik+1
, j −1
∆y 2
+
%i , j
ω
!
,
dove φk+1
è l’espressione di f ik+1
restitutita dalla (5.15) ed ω è il peso assegnato al fine
,j
i,j
di accelerare la convergenza verso la soluzione (in generale 1 < ω < 2).
57
INTEGRAZIONE NUMERICA DI PDE
5.7
METODO SPETTRALE
Supponiamo di avere una funzione f (x) e di poterla sviluppare come f (x) =
2
j =1 a j φ j (x),
P∞
dove {φ j } j è una base nello spazio L (R). Se l’equazione differenziale ha la forma L f (x) =
%(x), dove L è un operatore differenziale lineare, si ha che
Ã
!
N
X
r (x) = L
a j φ j (x) − %(x)
j =1
costituisce una misura della bontà dell’approssimazione che prevede di troncare ad N
R
lo sviluppo. Si può scegliere a questo punto di minimizzare kr k = r 2 (x) dx, oppure
­
® R
porre r (x k ) = 0 per certi valori di un reticolo, o ancora che r , φ j = r (x)φ(x) dx = 0 ∀ j
R
(metodo di Galërkin), o, come variante, r (x)θ j (x) dx = 0 per ogni elemento θ j di una
famiglia prefissata.
Nel caso di equazioni alle derivate parziali con variabili indipendenti x e t , i coefficienti a j sono supposti dipendenti dal tempo. Il metodo spettrale applicato a L = ∂t + c∂x
­
®
consiste nel considerare una base ortonormalizzata φ j , φ j , φk = δ j k , con φ j = p1 ei j x
2π
e di adoperare il metodo di Galërkin
µ
¶
Z
1
∂
∂ X
a j (t )ei j x dx = 0 ⇒ ∂t a k + i kc a k = 0.
e−i kx
+c
2π
∂t
∂x j
Il modello di Stommel prevede l’introduzione di un parain un’equazione nella forma
MODELLO DI STOMMEL
ν
β
metro ² =
²φxx − φx + 1 = 0,
x ∈ [0, 1].
In genere si utilizzano, come base, seni e coseni. Imponendo come condizioni al contorP
no φ(0) = φ(1) = 0, allora φ(x) = j a j sin(π j x). Sostituendo nell’equazione di Stommel,
R1
δjk
tenendo in considerazione che 0 sin( j πx) sin(kπx) dx = 2 ed imponendo il criterio di
Galërkin si ottiene
²a k
k 2 π2 X
1 − (−1) j +k 1 − (−1)k
=
+ aj jk
⇔ (1 + A)a = τ.
2
j 2 − k2
kπ
j
Il costo computazionale è legato al calcolo dell’inversa della matrice 1 + A.
5.8
METODO AGLI ELEMENTI FINITI
Supponiamo di avere l’equazione delle onde in presenza di diffusione ∂t u + c∂x u =
(
¯
¯
0
se ¯x − x j ¯ > ∆x,
P
2
ν∂xx u. Sia u = i u i φi , con ad esempio φ j =
dove ∆x è
¯
¯
|x−x j |
1 − ∆x
se ¯x − x j ¯ < ∆x,
­
®
una certa ampiezza prefissata. Le funzioni non sono ortogonali: φ j , φk = 23 ∆xδ j k +
∆x 3
6 δ j ±1,k .
Adoperando la stessa tecnica precedente si arriva all’equazione
∂t u i −1 + 4∂t u i + ∂t u i +1
u i +1 − u i −1
u i +1 + 2u i + u i −1
+c
−ν
= 0.
6
2∆x
∆x 2
58