Università degli studi di Trento
Corso di Meccanica razionale 2
Macchina di Atwood
Nella macchina di Atwood due corpi puntiformi pesanti, di masse rispettive m e M,
sono vincolati a muoversi verticalmente e collegati fra loro mediante un filo inestendibile,
perfettamente flessibile e di massa trascurabile che scorre senza attrito su una puleggia
fissa — vedi figura. Il filo ideale scorre senza
attrito sulla carrucola fissa e dunque la sua
tensione si mantiene costante in modulo da
un capo all’altro, sia in condizioni statiche
che in condizioni dinamiche, per via della
condizione di massa trascurabile.
Equazioni del moto
Introdotta una terna di riferimento Oxyz con l’asse Ox diretto verticalmente verso l’alto,
il corpo di massa m è soggetto alla forza peso −mg ê1 ed alla forza di tensione T ê1 del filo.
Se si indica con x la quota del corpo di massa m, l’equazione del moto di questo si scrive
mẍ = T − mg .
La condizione di inestendibilità del filo implica che la quota del secondo corpo si possa
esprimere nella forma
costante − x ;
poiché le forze agenti sono il peso −Mg ê1 e la tensione T ê1 , la corrispondente equazione
del moto diventa perciò
−M ẍ = T − Mg .
Dalle equazioni del moto si deduce
ẍ =
T
−g
m
ẍ = −
T
+g
M
per cui, confrontando i secondi membri,
T
T
−g = −
+g
m
M
e la tensione del filo vale pertanto
T = 2g
Mm
.
M +m
L’equazione del moto per il corpo di massa M viene cosı̀ determinata esplicitamente:
ẍ = 2g
Stefano Siboni
M −m
M
−g =
g.
M +m
M +m
1
Università degli studi di Trento Corso di Meccanica razionale 2
Il moto dei due corpi è quindi uniformemente accelerato, il primo con accelerazione
M −m
g
M +m
ed il secondo con accelerazione opposta
−
M −m
g.
M +m
Approccio lagrangiano
Le tensioni applicate ai due corpi puntiformi devono essere interpretate come forze di
reazione vincolare, le sole applicate ai corpi costituenti il sistema — filo e puleggia fissa
sono soltanto dispositivi meccanici che esprimono i vincoli. È facile convincersi che il
sistema soddisfa al principio delle reazioni vincolari e può quindi essere considerato a
vincoli ideali. Gli spostamenti virtuali delle masse puntiformi m ed M si scrivono infatti,
rispettivamente,
− δx ê1
∀ δx ∈ R
δx ê1
per cui la potenza virtuale delle reazioni vincolari vale
δx ê1 · T + (−δx ê1 ) · T
e risulta quindi identicamente nulla per qualsiasi spostamento virtuale e per qualsiasi
tensione esplicabile dal filo — diretta verticalmente verso l’alto. Le equazioni pure del
moto del sistema possono perciò essere determinate facendo uso dell’equazione simbolica
della dinamica e dunque del formalismo lagrangiano. Le sollecitazioni attive agenti sul
sistema si riducono alle sole forze peso, per cui la dinamica del sistema viene descritta per
mezzo della funzione lagrangiana. L’energia cinetica del sistema è la somma delle energie
cinetiche dei due corpi
T =
1
m+M 2
1
mẋ2 + M(−ẋ)2 =
ẋ
2
2
2
e il potenziale del sistema è quello associato alle forze peso:
U = −mgx − Mg(L − x) = (M − m)gx + costante .
La lagrangiana del sistema risulta perciò
L = T +U =
m+M 2
ẋ + (M − m)gx
2
e porge l’equazione del moto
d ∂L ∂L
−
= (M + m)ẍ − (M − m)g = 0
dt ∂ ẋ
∂x
Stefano Siboni
2
Università degli studi di Trento
Corso di Meccanica razionale 2
che coincide con quella già precedentemente determinata.
Puleggia mobile
Si consideri il sistema costituito da una puleggia mobile sulla quale è innestata senza
possibilità di scorrimento una fune ideale perfettamente flessibile, imponderabile ed inestendibile, che collega fra loro due corpi puntiformi A e B di masse rispettive m ed M,
mantenendosi costantemente tesa. Si indica
con R il raggio della puleggia e con I il momento d’inerzia della stessa rispetto al suo
asse fisso. I corpi A e B sono pesanti e vincolati a muoversi lungo la direzione verticale,
rappresentata dall’asse Oy di una terna di
riferimento Oxyz.
Equazioni del moto
I tratti verticali di fune, tesi e di massa trascurabile, trasmettono inalterata la tensione
fra i punti materiali e la puleggia; la presenza di forze di attrito, essenziali per mettere
in rotazione la puleggia mantenendo l’adesione di questa con la fune, implica tuttavia che
la tensione della fune debba variare lungo il tratto di fune a contatto con la puleggia. Si
indichino con T 1 = T1 ê2 e T 2 = T2 ê2 le tensioni applicate ai corpi A e B rispettivamente.
Le relative reazioni che i due tratti verticali di fune esercita sulla puleggia valgono quindi
−T 1 = −T1 ê2 e −T 2 = −T2 ê2 , rispettivamente applicate nei punti A e B in figura. Il
punto A è soggetto al proprio peso −mgê2 alla tensione T1 ê2 per cui, indicata con y la
quota del punto, la sua equazione del moto si scrive
mÿ = T1 − mg .
A meno di una costante fissata, connessa alla lunghezza complessiva della fune e al raggio
R della puleggia, la quota di B vale −y e l’accelerazione di questo si riduce a −ÿê2 ;
essendo soggetto alla tensione T2 ê2 e alla forza peso −Mgê2 , il punto deve perciò soddisfare
l’equazione del moto
−M ÿ = T2 − Mg .
Quanto alla puleggia, che si assume con asse fisso privo di attrito, il suo moto è governato
dall’equazione
I θ̈ = [(−Rê1 ) ∧ (−T1 ê2 ) + Rê1 ∧ (−T ê2 )] · ê3 = R(T1 − T2 ) .
essendosi assunto nullo il momento risultante delle reazioni vincolari agenti sull’asse Cz.
Si noti che nelle tre equazioni differenziali precedenti le tensioni incognite T1 e T2 vanno
interpretate come forze di reazione vincolare e devono quindi essere rimosse per ottenere
Stefano Siboni
3
Università degli studi di Trento
Corso di Meccanica razionale 2
le equazioni pure del moto. A questo scopo occorre considerare che le variabili y e θ del
sistema non sono indipendenti, dovendo risultare
y + Rθ = costante
per via della postulata, perfetta aderenza della fune alla puleggia. Il sistema di equazioni
da risolvere è quindi dato da:
mÿ = T1 − mg
M ÿ = −T2 + Mg
I θ̈ = R(T1 − T2 )
Rθ̇ + ẏ = 0
.
Le prime due equazioni porgono per le tensioni le espressioni
T1 = mg + mÿ
T2 = Mg − M ÿ
che sostituite nell’equazione del moto della puleggia conducono alla relazione
I θ̈ = R(mg + mÿ − Mg + M ÿ) = R(m − M)g + R(m + M)ÿ ,
nella quale θ̈ = −ÿ/R. Si ha perciò
−
e quindi
I
ÿ = R(m − M)g + R(m + M)ÿ
R
I ÿ = (M − m)g .
R2
Il moto del corpo A è quindi uniformemente accelerato lungo la direzione verticale, con
accelerazione scalare
M −m
g.
ÿ =
I
m+M + 2
R
Uniformemente accelerati sono anche il moto rettilineo del punto B, con accelerazione
opposta
M −m
g,
−
I
m+M + 2
R
e quello rotatorio della puleggia, la cui accelerazione angolare istantanea scalare si scrive:
m+M +
−
Stefano Siboni
ÿ
= −
R
M −m
g
.
I R
m+M + 2
R
4
Università degli studi di Trento
Corso di Meccanica razionale 2
Approccio lagrangiano
Anche questo sistema può riguardarsi a vincoli ideali. La potenza virtuale delle reazioni
vincolari si scrive infatti:
φ
π φ = −Rδθ ê2 · T 1 + δθ ê3 · M C + Rδθ ê2 · T 2
∀ δθ ∈ R
e la condizione di idealità dei vincoli impone perciò che il momento assiale delle reazioni
vincolari applicate alla puleggia, rispetto all’asse Cz, si esprima in termini delle tensioni
T 1 e T 2 per mezzo della relazione
φ
ê3 · M C = R ê2 · T 1 − R ê2 · T 2 = R(T1 − T2 ) .
Nella fattispecie, la condizione risulta certamente verificata, in quanto l’asse Cz della
puleggia è per ipotesi privo di attrito e le sole reazioni vincolari esterne che producono
momento sulla puleggia rispetto allo stesso asse sono le sole tensioni −T 1 in A e −T 2 in
B.
Scelta l’ordinata y come coordinata generalizzata, la lagrangiana del sistema assume la
forma
1 ẏ 2
m 2 M
2
ẏ +
(−ẏ) + I −
− mgy − Mg(−y) =
L =
2
2
2
R
I 1
m + M + 2 ẏ 2 + (M − m)gy
=
2
R
in modo che l’equazione di Lagrange
d ∂L ∂L
−
= 0
dt ∂ ẏ
∂y
diventa
I ÿ − (M − m)g = 0 ,
R2
in accordo con il risultato già ricavato in precedenza.
m+M +
Pendolo semplice a filo
Secondo la usuale definizione, un pendolo semplice è costituito da un punto materiale
pesante vincolato a scorrere senza attrito lungo una circonferenza fissa disposta in un piano
verticale. Tale definizione, sebbene più semplice dal punto di vista della trattazione teorica,
non corrisponde tuttavia alla nozione più familiare di pendolo semplice, che vede realizzato
il dispositivo collegando un punto materiale pesante P ad un punto fisso O mediante un
filo flessibile, inestendibile e di massa trascurabile. Indicata con R la lunghezza costante
del filo, che si suppone sempre teso, e assunti per semplicità tutti i moti localizzati in un
piano verticale, il moto del punto materiale avviene interamente in una circonferenza fissa
di centro O, raggio R, collocata nel piano verticale preassegnato. Se si identifica detto
piano con il piano coordinato Oxy di una terna cartesiana ortogonale Oxyz, con l’asse
verticale Oy orientato verso l’alto, la parametrizzazione della circonferenza vincolare si
scrive
P (θ) − O = R(sin θ ê1 − cos θ ê2 ) , θ ∈ R
Stefano Siboni
5
Università degli studi di Trento
Corso di Meccanica razionale 2
in termini dell’angolo al centro θ misurato fra la verticale condotta da O verso il basso ed
il raggio OP . La derivata prima della parametrizzazione — regolare — vale allora
P (θ) =
dP
(θ) = R(cos θ ê1 + sin θ ê2 )
dθ
e definisce il versore tangente alla traiettoria per mezzo dell’ovvia relazione
τ̂ (θ) =
P (θ)
= cos θ ê1 + sin θ ê2
|P (θ)|
∀θ ∈ R
che derivata ulteriormente in θ porge il versore normale
dτ̂
(θ) = − sin θ ê1 + cos θ ê2 = n̂(θ) .
dθ
In termini dell’ascissa curvilinea s = Rθ e
del raggio di curvatura ρ = R l’equazione del
moto del punto P , di massa m, è data dal
postulato delle reazioni vincolari:
ms̈τ̂ +
mṡ2
n̂ = −mg ê2 + Φ
ρ
ossia, sostituendo le espressioni di s e ρ e semplificando,
mRθ̈τ̂ + mRθ̇2 n̂ = −mg ê2 + Φ
dove Φ indica la reazione vincolare agente sul punto materiale. Poiché il filo si assume
sempre teso, la reazione vincolare risulta comunque diretta lungo n̂. La proiezione
dell’equazione precedente lungo il versore tangente porge pertanto l’equazione pura del
moto
mRθ̈ = −mg sin θ .
La reazione vincolare lungo un generico moto naturale del sistema diventa cosı̀
Φ = mg ê2 + mRθ̈τ̂ + mRθ̇2 n̂ = mg ê2 − mg sin θ τ̂ + mRθ̇2 n̂
dove peraltro
ê2 = ê2 · τ̂ τ̂ + ê2 · n̂ n̂ = sin θ τ̂ + cos θ n̂
e quindi:
Φ = mg cos θ n̂ + mRθ̇2 n̂ = m(g cos θ + Rθ̇2 ) n̂
La relazione vale se e soltanto se θ(t) descrive un moto naturale del sistema — corrisponde cioè ad una soluzione dell’equazione pura del moto. Si osservi tuttavia che,
Stefano Siboni
6
Università degli studi di Trento
Corso di Meccanica razionale 2
a differenza di quanto avverrebbe per una circonferenza vincolare rigida e liscia, in un
pendolo realizzato con un filo deve aversi
Φ · n̂ ≥ 0
in quanto il filo può esercitare una forza di trazione su P , ma non è in grado di sospingerlo. Di conseguenza, un moto naturale oltre a soddisfare le equazioni di Lagrange
deve verificare la condizione supplementare
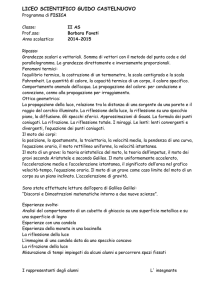
g cos θ + Rθ̇2 ≥ 0
g
cos θ. Detta condizione si traduce, di fatto, in una restrizione sulla
R
regione del piano delle fasi (θ, θ̇) ∈ R2 effettivamente accessibile al sistema. La regione
del piano delle fasi nella quale sono definiti i moti del pendolo è evidenziata col tratteggio
nella figura seguente:
ovvero θ̇2 ≥ −
in cui i contorni corrispondono alla curva di equazione g cos θ + Rθ̇2 = 0. La condizione
di ammissibilità impone che per θ ∈ [π/2, 3π/2] la velocità angolare istantanea θ̇ — e
con quella la velocità θ̇τ̂ (θ) del punto P — abbia modulo |θ̇| sufficientemente elevato.
Soltanto in tale circostanza, infatti, la tensione del filo è chiamata ad esercitare su P
una forza diretta verso il centro O e non in senso avverso, azione che il filo ideale
risulta effettivamente in grado di esplicare.
In caso contrario il filo non è in condizione di
esercitare la reazione che serve a mantenere
il punto materiale sulla traiettoria circolare:
mentre il filo O − P non è più teso, il punto si
distacca perciò dalla circonferenza di centro
O e raggio R e prende a muoversi di moto
libero — parabolico — fino a che non torna
ad incontrare la circonferenza in un’altra posizione, laddove il filo tornerà a tendersi.
Stefano Siboni
7