MOX–Report No. 11/2011
Stent a rilascio di farmaco: una storia di successo per
la matematica applicata
Formaggia, L.; Minisini, S.; Zunino, P.
MOX, Dipartimento di Matematica “F. Brioschi”
Politecnico di Milano, Via Bonardi 9 - 20133 Milano (Italy)
[email protected]
http://mox.polimi.it
Stent a rilascio di farmaco: una storia di successo per
la matematica applicata ∗
L. Formaggia♯, S. Minisini, P. Zunino
17 febbraio 2011
MOX– Modellistica e Calcolo Scientifico
Dipartimento di Matematica “F. Brioschi”
Politecnico di Milano
P.zza Leonardo da Vinci 32, 20133 Milano, Italy
[email protected]
Sommario
L’uso di modelli matematici a supporto della ricerca in medicina ha visto negli ultimi decenni un grosso impulso, stimolando l’attivit di numerosi
matematici applicati. Da un lato la migliore comprensione dei fenomeni
fisici e biologici e dall’altro la disponibilit di strumenti di calcolo sempre
pi potenti a costi decrescenti ha fatto si che la simulazione numerica possa
effettivamente affiancarsi, anche se non sostituirsi, alla sperimentazione su
animali e a trials clinici. Nel caso preso in esame da questo lavoro, che
riguarda particolari dispositivi a rilascio di farmaco usati nel trattamento dell’arteriosclerosi, essa permette di poter valutare l’effetto di differenti
configurazioni del dispositivo, o diverse tipologie di farmaco. Nell’articolo
si da’ una rassegna dei modelli matematici utilizzati nell’ambito degli stent
a rilascio di farmaco, partendo dai modelli pi semplici, basati su formule
con forte carattere empirico o equazioni differenziali ordinarie, fino a modelli basati su sistemi di equazioni alle derivate parziali che accoppiano i
fenomeni di rilascio con quelli di diffusione e trasporto nei tessuti biologici
e nel flusso sanguigno.
In the last decades the adoption of mathematical models to support
medical research has found a considerable increase of interest, stimulating
the activity of applied mathematicians. A better understanding of the
physical and biological phenomena together with the availability of powerful
and affordable computers has prompted the use of numerical simulation as a
∗
I risultati del presente lavoro sono stati parzialmente finanziati dal progetto “Models and
methods for degradable materials” dell’Istituto Italiano di Tecnologie (IIT), e da un progetto
PRIN07 del Ministero dell’Istruzione, Università e Ricerca.
1
complement, even if not yet as a substitute, of animal experimentation and
clinical trials. In the case considered here, namely that of particular drug
eluting devices used in the treatment of arteriosclerosis, it allows for the
evaluation of the effect of different designs of the device, or different type
of drugs. In this article we give a review of mathematical models used for
simulating the functioning of drug eluting stents. We start by considering
the simplest models, based on empirical formulae or ordinary differential
equations, up to models based on systems of partial differential equations
that describe the drug elution processes coupled with the diffusion and
transport of the drug in biological tissues and blood flow.
1
Introduzione
In questo lavoro vogliamo approfondire uno degli numerosi esempi in cui strumenti matematici evoluti vengono applicati a discipline apparentemente lontane
da un approccio ingegneristico, come ad esempio la medicina. A tal fine, dopo aver brevemente introdotto e motivato l’uso degli stent a rilascio di farmaco,
descriveremo come la loro funzionalità possa essere spiegata con modelli matematici di diversa complessità, partendo da semplici formule empiriche per giungere
a sistemi di equazioni alle derivate parziali.
La motivazione finale consiste nello sviluppare strumenti che consentano di
migliorare il trattamento delle malattie di natura cardiovascolare, che coinvolgono una porzione rilevante della popolazione e sono da molti anni al centro di
innovative linee di ricerca multidisciplinare. I dati estratti da Heart Disease and
Stroke, Statistics del 2009 dell’American Heart Association mostrano come nel
2006 le morti dovute a malattie cardiovascolari negli Stati Uniti ammontino a
900 mila unità, di cui il 50% è dovuto a patologie che coinvolgono le arterie coronarie. Tuttavia, analizzando il tasso di mortalità dagli anni ’70 si nota, a partire
dal 2000, un’inversione di tendenza ed una diminuzione della mortalità causata
da queste malattie, che coincide con la crescita dell’innovazione nei trattamenti
terapeutici utilizzati.
Durante l’invecchiamento, le arterie sono soggette a cambiamenti nella composizione della parete che possono portare ad una degenerazione del comportamento meccanico e fluidodinamico del sistema cardio-vascolare. Sebbene l’entità
dei cambiamenti dipenda dalle caratteristiche dell’individuo (il sesso, l’età, lo stile di vita, la predisposizione genetica, le alterazioni del metabolismo), si nota che
alcune arterie, come l’aorta, la carotide o le coronarie, sono maggiormente soggette a questi cambiamenti. In generale la diminuzione di elasticità della parete
arteriosa e la modificazione della sua morfologia, prendono il nome di processi
arteriosclerotici. Tali processi sono causati da un’alterazione della parete arteriosa caratterizzata da un accumulo di lipidi (colesterolo), carboidrati complessi
o costituenti del sangue. La conseguenza di questa alterazione, associata alla
formazione di tessuto fibroso, è l’ispessimento della parete, che coinvolge progressivamente tutti gli strati del vaso a partire dal lume vasale (la parte interna
2
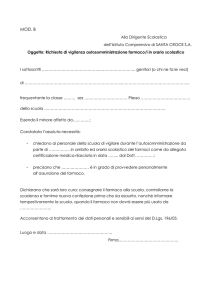
Figura 1: Arteria stenotica a sinistra e arteria riaperta con un trattamento
terapeutico non invasivo a destra.
e cava di un’arteria, sede del flusso ematico). Macroscopicamente quello che si
osserva è un accumulo di materiale e la formazione della cosiddetta placca aterosclerotica. Il risultato è la riduzione dell’elasticità del vaso ed il restringimento
(stenosi) del lume vasale come mostrato in Fig.1.
Il trattamento delle patologie coronariche richiede negli stati più avanzati un
intervento chirurgico tipo bypass, oppure un intervento di angioplastica (Percutaneous Coronary Intervention, PCI) con l’impianto di uno stent. Lo stent
è una micro-struttura costituita da filamenti metallici, formati da materiale a
memoria di forma, intrecciati e opportunamente sagomati. Il dispositivo viene
collocato ed espanso in corrispondenza dell’occlusione dell’arteria, dovuta alla
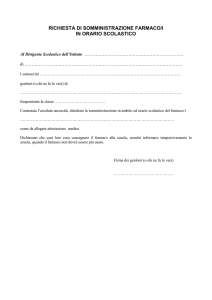
presenza di una placca-aterosclerotica, per ripristinare il diametro originale dell’arteria e permettere il regolare flusso del sangue. I passaggi principali della
procedura di impianto dello stent sono mostrati in Fig.3. Gli stent impiantati
rimangono permanentemente nel sito dove sono stati posizionati. Nonostante la
tecnica sia relativamente recente, l’origine del nome stent, di cui non vi è una
diretta traduzione in Italiano, è controversa. C’è chi lo fa risalire a una antica
espressione inglese che indica il processo di irrigidimento di tessuti per abiti,
chi lo attribuisce invece a un chirurgo plastico olandese che nel 1916 usò questo
termine per indicare un particolare materiale per calchi dentali inventato dal
dentista inglese Charles Stent (1807-1885).
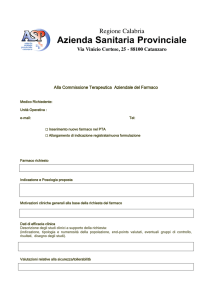
Negli ultimi dieci anni il trattamento delle patologie per mezzo di PCI ha
avuto un aumento enorme passando da 400mila interventi nel 1995 ad oltre un
milione e 300mila nel 2005. Ciò è dovuto al fatto che l’intervento di bypass
consiste in un’operazione chirurgica invasiva per creare un ponte artificiale che
permetta di aggirare l’ostacolo alla circolazione come mostrato in Fig.2. Questo
ponte, chiamato appunto bypass, è costituito da un tratto di vaso sanguigno sano
e ben funzionante che viene prelevato dal chirurgo al momento stesso dell’operazione, oppure da una protesi vascolare. L’impianto di uno stent è un’operazione
molto meno invasiva e gravosa rispetto all’impianto di un bypass, ed inoltre è
3
Figura 2: Bypass coronarico. Una protesi vascolare viene introdotta per
scavalcare l’occlusione arteriosa.
economicamente vantaggiosa.
Nonostante i chiari vantaggi riscontrati nell’utilizzo degli stent, essi devono soddisfare numerose specifiche, talvolta contrastanti. Ad esempio devono
essere estremamente flessibili lungo il loro asse longitudinale per poter passare
agevolmente attraverso arterie di piccolo diametro e spesso di forma tortuosa;
devono essere visibili con tecniche radiologiche per essere guidati dall’esterno e
posizionati. Inoltre devono essere facilmente espandibili fino al diametro originale dell’arteria e essere nel contempo in grado di mantenerla dilatata resistendo
alle sollecitazioni meccaniche imposte da questa. Infine devono risultare poco
invasivi rispetto al flusso sanguigno ed estremamente biocompatibili per evitare pericolose reazioni immunitarie dell’organismo. L’impianto di uno stent in
un’arteria comporta delle modifiche rilevanti alla struttura del vaso in oggetto, che devono essere accuratamente studiate per ottimizzare il trattamento e
prevenire complicazioni. In primo luogo si riscontrano modifiche delle proprietà
elastiche e di rigidezza della parete vascolare che possono generare in alcuni casi una perturbazione sulla distribuzione della pressione sanguigna. In secondo
luogo gli stent impiantati interagiscono con le cellule della parete vascolare con
cui sono a contatto. Metalli come ferro, nichel etc., di cui sono composti alcune
famiglie di stent, possono interagire con le cellule degli stati più interni della
parete vascolare (intima e media) causando una reazione infiammatoria che può
portare ad una proliferazione incontrollata delle cellule riducendo nuovamente il
lume vascolare, un fenomeno noto come restenosi. Per contrastare questo fenomeno nell’ultimo decennio la ricerca è stata molto attiva nello sviluppo di stent
a rilascio di farmaco. In questo caso il dispositivo è rivestito da un microstrato di materiale, generalmente di natura polimerica, capace di immagazzinare e
4
Figura 3: Procedimento di impianto di uno stent. A: Lo stent viene posto
sopra un catetere coronarico, viene portato in loco tramite un catetere guida.
B: lo stent viene lasciato in corrispondenza della stenosi. C: Nel caso di stent
espandibili, lo stent è montato su un palloncino che viene gonfiato. Durante la
fase di espansione il palloncino riapre l’arteria occlusa. D: lo stent previene il
collasso dell’arteria dopo la rimozione del palloncino.
rilasciare lentamente un farmaco, il cui effetto è quello di inibire la proliferazione cellulare e la ricrescita della placca aterosclerotica. I principali elementi
di interesse sono la scelta del farmaco ed il design di una opportuna matrice
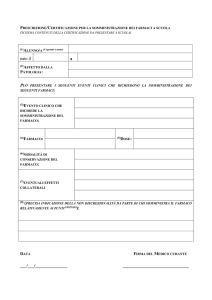
capace di immagazzinarlo e rilasciarlo con una modalità predeterminata. Il recente sviluppo tecnologico ha permesso di proporre diverse soluzioni. Da un
lato le nuove microtecnologie consentono di forare opportunamente i filamenti
dello stent come mostrato in Fig.4 ( a sinistra) e di riempire i fori con strati di
materiali o farmaci di diversa natura . Dall’altro la costante ricerca nell’ambito
della scienza dei materiali di miglioramenti della biocompatibilità ha permesso
di realizzare stent costituiti interamente da polimeri biodegradabili, Fig.4 (a destra). In questo caso il materiale dopo aver rilasciato il farmaco viene riassorbito
dal tessuto. La problematica principale in questo caso è garantire una resistenza
meccanica adeguata dello stent per tempi sufficientemente lunghi in modo che il
trattamento sia efficace.
Queste nuove tecnologie aprono la via a innumerevoli possibilità per progettare uno stent con un profilo di rilascio predeterminato nel tempo di uno o
più farmaci che possono interagire con la parete vascolare o con la superficie di
contatto tra lo stent ed il sangue.
Lo studio dell’impatto della geometria dello stent sul rilascio di farmaco nella
parete circostante, come anche che la caratterizzazione dei pattern di rilascio a
seconda della natura del materiale utilizzato per immagazzinare il farmaco, è un
5
Figura 4: Due diverse tipologie di stent: a sinistra stent tipo pozzetto in cui i
fori sono riempiti con farmaco (Conor Medsystems, Menlo Park, California); a
destra uno stent completamente degradabile (Abbott Laboratories, IL, USA).
problema estremamente complesso in cui la modellistica matematica può venire
in aiuto. In particolare la modellistica matematica e la simulazione numerica
permettono di valutare il comportamento di diverse configurazioni del dispositivo
e del farmaco velocemente e con costi estremamente ridotti rispetto all’indagine
sperimentale. Inoltre i modelli computazionali sono un valido strumento per
mettere a confronto diverse soluzioni tecnologiche o proporne delle nuove. I
recenti dati raccolti sull’efficacia degli stent mostrano come sia necessaria la
diversificazione dei dispositivi a seconda del tipo di farmaco e del profilo di
rilascio ricercato, al fine di adattarsi in modo ottimale alle diverse patologie non
solo delle coronarie ma anche delle arterie periferiche ad alto rischio di occlusione.
Una trattazione sufficientemente esaustiva e generale dei modelli matematici
e computazionali proposti per lo studio del rilascio di farmaco esula dalle possibilità di questo lavoro. Il nostro scopo è illustrare brevemente lo sviluppo di
tali modelli, che partendo da semplici relazioni empiriche si sono successivamente sviluppati diventando sistemi di equazioni alle derivate parziali in grado di
descrivere i diversi fenomeni fisici coinvolti nel rilascio del farmaco da parte del
materiale polimerico e la sua distribuzione nel tessuto vascolare circostante. Per
approfondimenti, rimandiamo il lettore interessato a [11, 13].
2
Caratterizzazione della matrice di rilascio
In generale si parla di rilascio di farmaco in modalità controllata quando un
polimero viene sintetizzato insieme ad un farmaco, o in generale un agente attivo, che verrà poi rilasciato dal substrato polimerico in modo predefinito. Per
migliorare l’efficacia del trattamento terapeutico si vuole controllare la quantità
di farmaco presente nel tessuto in un determinato periodo di tempo (dose). Il
rilascio controllato si pone come obiettivo quello di mantenere il livello di farmaco nelle regioni circostanti al dispositivo all’interno di una finestra terapeutica
ottimale e per un intervallo temporale prolungato, in modo da essere efficace
senza mai raggiungere livelli di concentrazione tossici. In altre parole si vuole
progettare un materiale in grado di controllare non solo la velocità con cui il
farmaco viene rilasciato ma anche la durata complessiva del rilascio.
In questo ambito i modelli matematici possono intervenire per migliorare la
6
comprensione dei meccanismi di trasporto di massa che sono responsabili del
rilascio del farmaco. Da un punto di vista matematico i sistemi a rilascio di
farmaco possono essere classificati sulla base del meccanismo che domina la cinetica di rilascio. La scelta del modello matematico più appropriato dipende
molto dal tipo di farmaco e dal materiale utilizzato per contenerlo. In generale,
nel caso di matrici polimeriche possiamo identificare tre modalità principali di
rilascio. Tra i sistemi più comuni, troviamo quelli controllati dalla diffusione e
dalla dissoluzione. In questo caso il farmaco è inglobato nella matrice porosa in
forma solida e grazie alla penetrazione del fluido circostante all’interno della matrice può solubilizzarsi e diffondere nella matrice fino a raggiungere l’ambiente
esterno. Nei sistemi controllati dal solvente o sistemi rigonfiabili, l’assorbimento del fluido comporta la creazione di una pressione osmotica che determina la
fuoriuscita del principio attivo e un aumento di volume del sistema stesso. Infine, nei sistemi controllati chimicamente il rilascio di farmaco è controllato dalla
degradazione/erosione della matrice polimerica. In particolare la degradazione
polimerica consiste nella rottura selettiva (idrolisi o catalisi enzimatica) di alcuni
legami chimici all’interno delle catene di monomeri fino alla riduzione in molecole
semplici che si staccano dal materiale portando una diminuzione del suo volume (erosione). Tali molecole vengono poi eliminate dall’organismo attraverso i
processi consueti di catabolismo. In generale è difficile sviluppare un modello
matematico in grado di descrivere simultaneamente tutti i processi coinvolti nel
rilascio. Il punto cruciale è quindi quello di identificare o sviluppare un adeguato
modello matematico per uno specifico sistema a rilascio controllato.
Nella seguente trattazione ci interesseremo ai modelli utilizzati per descrivere
il rilascio nel caso di sistemi controllati dalla diffusione ed inoltre vedremo come è
possibile caratterizzare il tessuto arterioso circostante. Per illustrare il crescente
ruolo dei modelli matematici nello studio del rilascio controllato di farmaco,
procediamo innanzitutto con una descrizione in ordine cronologico dei modelli
proposti.
A partire dagli ’60, il modello matematico più famoso e largamente usato per
descrivere con una semplice equazione il rilascio di farmaco è noto come modello
di Higuchi [6] e risale al 1961. Il modello è stato successivamente modificato
ed esteso ad una più ampia classe di fenomeni che rientrano tra i sistemi controllati dalla diffusione. Alla base della formula analitica proposta da Higuchi
per descrivere la massa di farmaco rilasciata nel tempo ci sono diverse ipotesi,
riportiamo le due principali. Innanzitutto, si suppone che il sistema sia immerso
in un bagno acquoso di grandi dimensioni (o in un altro solvente da specificare)
cosı̀ che la concentrazione del farmaco sul lato del rilascio possa essere considerata pari a zero. Sia detta c0 la massa iniziale del farmaco caricato nel polimero,
e sia cs la solubilità del farmaco in acqua. Sotto l’ipotesi c0 >> cs , nel caso di
matrici polimerica piana vale la relazione:
M (t) = A[Dc (2c0 − cs )cs t]1/2 ,
(1)
dove M(t) è la massa di farmaco rilasciata al tempo t, Dc la diffusività del
7
farmaco nella matrice e A la superficie di rilascio. Successivamente il modello
è stato esteso per considerare casi più realistici con geometrie più complesse.
Tuttavia, per le ipotesi su cui si basa, il modello risulta accurato per descrivere
il rilascio solo per tempi brevi e termini correttivi vanno aggiunti per considerare
tempi di rilascio più lunghi. Nel caso in cui la concentrazione iniziale sia inferiore
alla solubilità la fase solida e quella dissolta non coesistono e si possono utilizzare
dei modelli puramente diffusivi come quello proposto da Crank nel 1975 [1] per
matrici estruse in film sottili:
∞
−Dc (2n + 1)2 π 2 t
1
8 X
M (t)
=1− 2
exp
,
(2)
M∞
π n=0 (2n + 1)2
L2
dove L è lo spessore della matrice.Il modello è stato esteso successivamente a
geometrie sferiche e cilindriche.
Accanto a questi modelli di natura deterministica troviamo una serie di modelli semi-empirici il cui scopo non è quello di descrivere in dettaglio i meccanismi
del rilascio, ma di fornire delle stime quantitative del farmaco rilasciato a seconda della natura del materiale e del farmaco utilizzato. Risultano quindi meno
flessibili e solamente in grado di descrivere specifiche condizioni sperimentali
piuttosto che classi di problemi. Uno dei modelli maggiormente usati e di facile
applicabilità è stato proposto da Peppas nel 1985 [15]. L’equazione proposta,
nota come ”power law”, assume la forma:
M (t)
= ktn ,
M∞
(3)
dove k è un parametro tipico della geometria della matrice considerata mentre n
dipende dal fenomeno dominante responsabile del rilascio. Ad esempio, nel caso
di matrici costituite da film sottili, se il rilascio è controllato dalla diffusione si ha
n ≈ 0.05. Nel caso di geometrie cilindriche o sferiche si ottiene invece n ≈ 0.45 e
n ≈ 0.43, rispettivamente. Anche se di facile implementazione, questa equazione
richiede molta cautela nel suo utilizzo, come anche un’attenta valutazione del
sistema sperimentale in esame e una profonda conoscenza del comportamento
dei materiali impiegati.
Oltre ai modelli che descrivono sistemi controllati dalla diffusione troviamo
anche quelli che considerano il fenomeno di dissoluzione ed il passaggio di fase del
farmaco dallo stato solido allo stato dissolto. La modellazione della dissoluzione
in termini matematici trova le sue origini alle fine dell’800 con l’equazione semiempirica di Noyes and Whitney [14], che descrive il flusso di concentrazione
dissolta come
Q(t) = kd A(cs − c),
(4)
dove kd è il coefficiente di dissoluzione. Da questa equazione si evince che il
motore della dissoluzione è la differenza tra il valore della concentrazione dissolta
(c) e la solubilità (cs ) del farmaco in ogni punto della matrice. Infatti, tanto più
8
il valore della concentrazione dissolta si avvicina al suo limite superiore definito
da cs tanto più il flusso di farmaco che passa in soluzione diminuisce. Sulla
base di questa semplice ma fondamentale equazione, viene proposto un modello
in cui entrambe le fasi del farmaco vengono descritte attraverso un sistema di
equazioni alle derivate parziali. In particolare, riportiamo il modello proposto da
Frenning e Stromme [4] nel 2003 per una matrice bidimensionale rappresentata
dal dominio Ωc :
∂c
− ∇ · (Dc ∇c) = kd s2/3 (cs − c), in Ωc × (0, T ],
∂t
∂s
= −kd s2/3 (cs − c),
in Ωc × (0, T ],
∂t
s = s0 , c = c0 ,
in Ωc .
(5)
La prima equazione descrive l’evoluzione della fase dissolta, che è influenzata
da due contributi, uno diffusivo ed un termine sorgente. Quest’ultimo, descrive
l’aumento della concentrazione di farmaco dovuto alla dissoluzione. La seconda
equazione descrive invece la reazione di dissoluzione della fase solida s. Il modello
completo è in grado di descrivere un ampia finestra di fenomeni. Supponiamo
che inizialmente il farmaco sia caricato in modo uniforme nel materiale, e che
si trovi solo allo stato solido, cioè c = 0, per t = 0. Nel caso di un problema
dominato dalla diffusione, cioè quando la diffusività del farmaco nel polimero è
molto elevata, la fase solida decresce uniformemente nel materiale (Fig.5). Il caso
limite è rappresentato dall’equazione (2). Nel caso invece di una diffusione molto
lenta il rilascio è controllato dalla dissoluzione. All’interno della matrice si crea
un fronte di dissoluzione e la matrice si divide in due regioni, una in cui la fase
solida è stata completamente dissolta e una seconda in cui la fase solida è pari
al suo valore iniziale, come in Fig.5. In questo caso l’approssimazione di Higuchi
risulta valida. Inoltre il modello (5) può essere utilizzato per descrivere tutte le
situazioni intermedie che non sono appropriatamente descritte dalle equazioni
(1) o (2).
3
Caratterizzazione del tessuto vascolare
Il trasporto di sostanze chimiche, ad esempio farmaci, attraverso tessuti viventi,
in particolare attraverso la parete dei vasi sanguigni, è un problema che coinvolge numerosi e complessi fenomeni fisici. Da un lato esso è influenzato dalla
fluidodinamica del sangue nelle arterie e dalla lenta filtrazione del plasma attraverso la parete di queste, fenomeno con il quale numerose specie chimiche,
come i nutrienti e le sostanze di scarto, vengono trasferite dal sangue all’interno
della parete dei grandi vasi sanguigni e viceversa. Dall’altro, occorre analizzare
la complessa interazione tra le sostanze chimiche considerate, la matrice extracellulare e le cellule che compongono i tessuti. Questo problema deve essere
affrontato sia dal punto di vista meccanico che da punto di vista biochimico.
9
Solid concentration profile
3
2.5
2.5
2
2
s
s
Solid concentration profile
3
1.5
1.5
1
1
0.5
0.5
0
0
0.2
0.4
0.6
0.8
0
0
1
x
0.2
0.4
0.6
0.8
1
x
Figura 5: Dissoluzione di un farmaco in una matrice porosa permeata da fluido.
Le diverse curve rappresentano la concentrazione della fase solida s a diversi
istanti. A sinistra viene riportato il caso a diffusione dominante, in cui non
sono percepibili significativi gradienti di concentrazione. A destra è illustrato il
comportamento del sistema nel caso a reazione dominante. Si nota la formazione
fronte di dissoluzione che si propaga da destra verso sinistra.
Infatti, durante la loro filtrazione attraverso la parete vascolare le molecole di
farmaco interagiscono continuamente con la rete di fibre che compongono il tessuto, urtando le fibre, filtrando attraverso gli interstizi tra una fibra e l’altra e
reagendo chimicamente con esse, ad esempio legandosi ad opportuni recettori
posti sulle fibre oppure venendo metabolizzate dalle cellule stesse.
La modellistica del trasporto di farmaco attraverso un tessuto arterioso risale
agli anni ’70. I primi tentativi descrivono il tessuto come un mezzo poroso all’interno del quale il farmaco si muove regolato da fenomeni di natura diffusiva e
convettiva ed è inoltre in grado di legarsi reversibilmente a specifici siti cellulari.
Viene anche introdotta la distinzione tra farmaco idrofilo, che si lega molto poco
al tessuto circostante, e farmaco idrofobo in grado di legarsi al tessuto per tempi
molto più lunghi. Questi modelli hanno dato luogo alla teoria detta pore theory formalizzata negli anni ’80 in [2, 5]. Negli anni ’90 appaiono i primi modelli
computazionali, citiamo ad esempio [7] ed in particolare il lavoro di M. Lovich ed
E.R. Edelman [12] volto a simulare la distribuzione di un farmaco della parete
vascolare. In particolare nel lavoro di Lovich ed Edelman lo scopo è quello di
scavalcare le limitazioni dei modelli animali (inadeguatezza del sistema di rilevamento, difficoltà nella ripetibilità degli esperimenti) e descrivere in maniera più
puntuale il comportamento del farmaco nel vaso. Il modello matematico viene
utilizzato come mezzo di comprensione dei dati sperimentali ed ottimizzazione
del rilascio.
Come accennato precedentemente, il farmaco si muove per diffusione, fenomeno generalmente descritto con la legge di Fick, e per advezione dovuta al
plasma che permea dal sangue all’interno della parete. Inoltre il farmaco può
10
legarsi reversibilmente con specifici siti cellulari e la reazione che regola questo
fenomeno può essere facilmente descritta come
kon
⇄
kof f
SF + R
SB .
(6)
Questa forma, introdotta in [5], descrive come un agente attivo libero all’interno
del tessuto SF si possa legare a specifici siti R per originare un nuovo complesso,
SB in cui l’agente attivo è legato. Le costanti kon e kof f sono i coefficienti che
definiscono rispettivamente la velocità di produzione del complesso legato SB e
la velocità con cui i siti di legami R vengono liberati. Nei lavori [5, 12] vengono
inoltre introdotti altri concetti come la frazione di tessuto in cui il farmaco può
distribuirsi, detta ζ ed il coefficiente di partizione, kp che, attraverso un’indagine
sperimentale, fornisce una stima mediata nel tempo della percentuale di farmaco
legata al tessuto all’equilibrio chimico [12]. In entrambi i lavori citati il modello
computazionale proposto è monodimensionale e calcola le quantità d’interesse
con un semplice algoritmo basato su uno schema alle differenze finite. Il tessuto è
diviso in elementi monodimensionali, ognuno con un nodo al centro. Il farmaco
si può presentare in tre differenti stati: in soluzione, legato reversibilmente a
specifici siti cellulari o metabolizzato. L’equazione proposta è,
∂J
∂b
∂a
=−
+ ,
∂t
∂x
∂t
(7)
dove a e b rappresentano l’attività chimica (che è proporzionale alla concentrazione) delle diverse fasi in cui si trova il farmaco, mentre J è il flusso di a. Il terzo
termine rappresenta la possibile reazione tra le varie fasi. Il flusso J mediato in
ogni cella del tessuto dopo diverse elaborazioni assume la forma
J = −σD
∂a
+ F a,
∂x
(8)
dove il coefficiente σ è funzione della porosità del mezzo e della frazione di
tessuto disponibile per il farmaco. Il secondo contributo rappresenta il trasporto
convettivo e F è funzione della velocità con cui il farmaco viene trasportato.
Il modello viene quindi risolto con uno schema alle differenze finite centrate
per cui la concentrazione del farmaco in soluzione in un dato istante temporale
dipende dalla concentrazione del farmaco nell’istante precedente e dal valore
della concentrazione nei nodi vicini.
Una significativa applicazione della pore theory si trova nei lavori di K. Perktold
e collaboratori [17, 9] che mirano a sviluppare un modello computazionale completo dei vasi arteriosi. Vengono infatti descritti e caratterizzati gli strati della
parete arteriosa (intima, media , adventitia) contemporaneamente al lume vasale
attraversato dal flusso ematico. Il trasporto di farmaco nello strato più interno
11
del vaso (l’intima) e nello strato intermedio (la media) sono descritte tramite
un’equazione di diffusione trasporto del tipo
∂d
− ∇ · (Dw ∇d) + γf uf · ∇d = 0
∂t
in Ωw × (0, T ],
(9)
dove uf è la velocità di filtrazione media e γf è un coefficiente di attrito per
il trasporto convettivo nella parete. In particolare la filtrazione del plasma è
mossa dalla differenza di pressione tra lo strato interno della parete arteriosa
e lo strato esterno. Da un punto di vista modellistico la parete arteriosa può
essere descritta come un mezzo poroso e la velocità di filtrazione del plasma
è calcolata utilizzando la legge di Darcy o Darcy-Brinkman, sotto ragionevoli
ipotesi semplificative descritte, ad esempio, in [16].
Per concludere questa sezione presentiamo un modello che formalizza e racchiude i fenomeni sopra introdotti. Le due fasi del farmaco nel tessuto, sono
modellate separatamente; d rappresenta la concentrazione dissolta di farmaco
libera di legarsi reversibilmente al tessuto e di diffondere, b la concentrazione di
farmaco legato al tessuto ed r la concentrazione dei siti cellulari liberi. Definito r0 come il valore iniziale della concentrazione dei siti liberi vale la relazione:
r0 −r = b. Il sistema di equazioni, che generalizza quello proposto in [18], assume
la forma seguente,
∂b
∂d
∂t − ∇ · (Dw ∇d) + γf uf · ∇d = − ∂t , in Ωw × (0, T ],
∂b
(10)
= ǫ−1
in Ωw × (0, T ],
w kon d(r0 − b) − kof f b,
∂t
d = d0 (x), b = b0 (x)
in Ωw × {t = 0} .
dove Dw è il coefficiente di diffusione del farmaco nel tessuto mentre a0 , b0 sono
i valori iniziali delle concentrazioni.
Osserviamo infine che la descrizione matematica del trasporto di natura convettiva del farmaco nel tessuto è stata ripresa e largamente analizzata da altri
autori che hanno considerato la modellazione meccanica della parete arteriosa
che, come corpo elastico, può subire delle modifiche dovute alla presenza del
fluido di filtrazione. Questa indagine ha dato luogo ad un’area di ricerca molto
attiva che mira a descrivere la proprietà meccaniche e termodinamiche di un
tessuto biologico sulla base della teoria delle miscele. Rimandiamo il lettore
interessato a [8].
3.1
Verso un modello completo
Per ottenere un modello completo in grado di descrivere il rilascio del farmaco
dalla matrice polimerica al tessuto circostante è necessario introdurre opportune
condizioni di accoppiamento. Riferendoci al modello di dissoluzione a due fasi
nel polimero (5) e di legame reversibile a due fasi nel tessuto (10), imponendo il
12
bilancio di massa sul sistema ovvero la continuità del flusso e della concentrazione
del solo farmaco dissolto sull’interfaccia dove avviene il rilascio, otteniamo
J(c, d) = −Dw ∇d · n = Dc ∇c · n,
c=d
(11)
dove n ı̀l versore normale all’interfaccia, diretto dal dominio Ωc (matrice) verso
Ωw (tessuto). Spesso, nella realtà il flusso di farmaco è controllato attraverso
la presenza di una membrana di rivestimento chiamata top coat che posizionata
all’esterno della matrice polimerica ha lo scopo di rallentare la fuoriuscita del
farmaco. Per descrivere questa soluzione tecnologica si utilizzano le equazioni di
Kedem-Katchalsky [10] sviluppate per descrivere il processo di trasferimento di
massa attraverso una membrana. Le equazioni descrivono il flusso di composti
chimici attraverso una membrana tenendo conto della loro concentrazione su
entrambi i lati della stessa. In particolare permettono alla concentrazione di
farmaco dissolto di assumere valori diversi ai due lati della membrana. Se, come
nel nostro caso, la componente normale della velocità attraverso l’interfaccia è
trascurabile, il flusso del farmaco è definito come
d
c
−
,
J(c, d) = P
γc γw
dove P rappresenta la permeabilità della membrana mentre, γc e γw sono dei
parametri caratteristici che tengono in considerazione la porosità del mezzo.
Questa equazione mostra come il flusso attraverso la membrana sia proporzionale
al salto della concentrazione nella fase dissolta. Le condizioni di accoppiamento
vengono riscritte, considerando il rivestimento, come segue,
−Dw ∇d · n = −D
c ∇c · n, d
c
−
.
−Dc ∇c · nc = P
γc γw
4
(12)
Applicazione dei modelli alla realtà clinica
La descrizione matematica proposta per l’insieme dei fenomeni che hanno luogo
nella parete vascolare e nel materiale di rivestimento comprende le equazioni di
Darcy per la filtrazione del plasma e sistemi di equazioni di diffusione, trasporto
e reazione per la dinamica del farmaco nei due diversi materiali. La principale
difficoltà per la soluzione numerica di questo insieme di equazioni applicate al
problema del rilascio di farmaco da parte di uno stent consiste nella necessità
di tenere conto di molteplici scale spaziali e temporali. Riguardo alle scale
spaziali, ricordiamo che il rivestimento dello stent in cui è contenuto il farmaco
da rilasciare è estremamente sottile, dell’ordine del micron, mentre le dimensioni
caratteristiche dello stent stesso sono quantificabili sulla scala dei centimetri.
Riguardo invece alle scale temporali, osserviamo che il rilascio di farmaco avviene
13
Figura 6: Geometria di uno stent in cui i filamenti metallici sono completamente ricoperti dal materiale polimerico a sinistra. Distribuzione del farmaco
all’interno dell’arteria dopo 10 ore dall’impianto del dispositivo a sinistra.
molto lentamente e si esaurisce solo nell’arco di svariati giorni, mentre il tempo
caratteristico per il flusso sanguigno è determinato dalla frequenza del battito
cardiaco, che risulta estremamente pir̀apida del rilascio.
Alla modellistica si affianca dunque un lavoro di natura numerica che si
pone come obiettivo quello di proporre robuste tecniche numeriche per risolvere
agevolmente ed in tempi ragionevoli il problema in esame.
Nel seguito riportiamo un esempio di una simulazione di rilascio di farmaco
da parte di uno stent la cui geometria corrisponde a quella di uno stent effettivamente commercializzato ed impiantato nei pazienti. La geometria dello uno
stent espanso all’interno dell’arteria è riportato in Fig.6 (a sinistra). La parte
grigia chiara evidenzia la forma della maglia dello stent che è completamente ricoperta dal materiale polimerico contenente il farmaco. Il dispositivo è immerso
nella parete arteriosa, zona scura. A partire da questa geometria viene costruito
un dominio computazionale utilizzato per risolvere il problema con schemi ad
elementi finiti per l’approssimazione spaziale mentre vengono usate differenze
finite per l’avanzamento in tempo.
Inizialmente viene stimata la velocità di filtrazione e la distribuzione della
pressione all’interno del vaso, poi si risolve l’insieme di equazioni per trovare la
distribuzione del farmaco. In particolare in Fig. 7 a destra, si vede la distribuzione del farmaco all’interno della parete dopo un arco temporale pari a dieci
ore. Si intuisce come la distribuzione del farmaco dipenda dal design dello stent,
infatti risulta maggiormente marcata in alcune zone della parete vicine alla sorgente di farmaco. I risultati numerici posso essere utilizzati anche per stimare
quantità di interesse clinico. Ad esempio, la dose che può essere interpretata
come la quantità totale di farmaco a cui l’organismo è esposto in un dato tempo
T è definita come
Z
T
[d(x, t) + b(x, t)]dt,
0
dove x è la variabile spaziale e t il tempo. Questa quantità è spesso utilizzata per
14
Figura 7: Dose del farmaco all’interno dell’arteria per un periodo di 6 giorni a
sinistra. Tempo di residenza del farmaco nel tessuto a destra
stimare l’efficacia terapeutica del dispositivo. Per avere un trattamento efficace è
importante che il farmaco sia presente all’interno del tessuto per un intervallo di
tempo sufficiente per limitare la risposta immunitaria dell’organismo e il richiamo cellulare responsabile della fase di ricrescita abnorme della parete. Non solo,
si vuole anche controllare la distribuzione del farmaco in modo tale da garantire
che una determinata concentrazione di farmaco sia presente in specifiche zone,
come ad esempio quelle dove la parete è stata maggiormente sollecitata durante
la fase di espansione dello stent. Fissata una concentrazione di riferimento nel
tessuto che chiamiamo δ(x, t), per ogni punto all’interno del tessuto si può stimare il tempo per cui la concentrazione totale di farmaco è maggiore per una
certa percentuale del valore di riferimento. Ad esempio in Fig.7 a sinistra sono
evidenziati i tempi (in giorni) per cui la concentrazione è pari al 10% del valore
di riferimento scelto.
Altri esempi, referenze bibliografiche e più dettagli sugli aspetti numerici
possono essere trovati nel Capitolo 7 del libro [3].
5
Conclusioni
Il significato di questo contributo è mettere in luce come la modellistica matematica e la sua eccezionale versatilità possa risultare uno strumento prezioso anche
per lo studio di problema come quello del rilascio controllato di farmaci, che
sembrerebbe a prima vista molto lontano da un rigoroso approccio scientifico,
poiché è nato a partire da esigenze cliniche utilizzando inizialmente esclusivamente metodologie sperimentali. Speriamo che questo esempio, come innumerevoli
altri, possa spronare le future generazioni di ricercatori a osare sempre di più
ed affrontare con successo problemi apparentemente lontani da una semplice
formalizzazione in modelli.
I risultati del presente lavoro sono stati parzialmente finanziati dal progetto
“Models and methods for degradable materials” dell’Istituto Italiano di Tecnologie (IIT), e da un progetto PRIN07 del Ministero dell’Istruzione, Università e
Ricerca.
15
A
Notazione
c0 :
concentrazioni iniziale di farmaco in fase dissolta
cs :
concentrazione di saturazione del farmaco
c:
concentrazione di farmaco in fase dissolta nel polimero
s:
concentrazione di farmaco in fase solida nel polimero
d:
concentrazioni di farmaco in fase dissolta nel tessuto
b:
concentrazioni di farmaco legato nel tessuto
r:
concentrazioni di siti cellulari che legano il farmaco
ai :
attività chimica dell’i-esima sostanza
Dc , Dw :
coefficiente di diffusione del farmaco nel polimero e nel tessuto
A:
superficie di rilascio
L:
spessore della matrice
kd :
coefficiente di dissoluzione
kon , kof f :
coefficienti di associazione e dissociazione del farmaco nel tessuto
kp :
coefficiente di partizione
uf :
velocitá di filtrazione del plasma nella parete
M (t), M∞ : massa di farmaco rilasciata al tempo t o asintoticamante per t → 0
Q(t) :
flusso di farmaco dissolto
Riferimenti bibliografici
[1] J. Crank. The mathematics of diffusion. Clarendon Press, Oxford, second
edition, 1975.
[2] F.E. Curry. Mechanics and thermodynamics of transcapillary exchange.
Handbook of Physiology, 4(part 1):309–374, 1984.
[3] Luca Formaggia, Alfio Quarteroni, and Alessandro Veneziani, editors. Cardiovascular mathematics, volume 1 of MS&A. Modeling, Simulation and
Applications. Springer-Verlag Italia, Milan, 2009. Modeling and simulation
of the circulatory system.
[4] G. Frenning and M. Strømme. Drug release modeled by dissolution,
diffusion, and immobilization. International journal of pharmaceutics,
250(1):137–145, 2003.
[5] D.L. Fry. Mathematical models of arterial transmural transport. American Journal of Physiology- Heart and Circulatory Physiology, 248(2):H240,
1985.
[6] T. Higuchi. Mechanism of sustained release action. J. Pharm. Sci, 52:1145–
1152, 1963.
[7] Z.J. Huang and J.M. Tarbell. Numerical simulation of mass transfer in
porous media of blood vessel walls. American Journal of Physiology- Heart
and Circulatory Physiology, 273(1):H464, 1997.
16
[8] J.D. Humphrey. Cardiovascular solid mechanics: cells, tissues, and organs.
Springer Verlag, 2002.
[9] G. Karner and K. Perktold. Effect of endothelial injury and increased blood
pressure on albumin accumulation in the arterial wall: a numerical study.
Journal of Biomechanics, 33(6):709–715, 2000.
[10] O. Kedem and A. Katchalsky. Thermodynamic analysis of the permeability
of biological membranes to non-electrolytes. Biochimica et biophysica Acta,
27:229–246, 1958.
[11] R. Langer. Drug delivery and targeting: review. Nature, 392(6679 Suppl),
1998.
[12] M.A. Lovich and E.R. Edelman. Computational simulations of local vascular heparin deposition and distribution. Am. J. Physiol., 271:214–224,
1996.
[13] Panos Macheras and Athanassios Iliadis. Modeling in biopharmaceutics,
pharmacokinetics, and pharmacodynamics, volume 30 of Interdisciplinary Applied Mathematics. Springer, New York, 2006. Homogeneous and
heterogeneous approaches.
[14] A.A. Noyes and W.R. Whitney. The rate of solution of solid substances in
their own solutions. Journal of the American Chemical Society, 19(12):930–
934, 1897.
[15] N.A. Peppas. Analysis of Fickian and non-Fickian drug release from
polymers. Pharmaceutica Acta Helvetiae, 60(4):110, 1985.
[16] K.R. Rajagopal. On a hierarchy of approximate models for flows of incompressible fluids through porous solids. Math. Models Methods Appl. Sci.,
17(2):215–252, 2007.
[17] G. Rappitsch and K. Perktold. Computer simulation of convective diffusion
processes in large arteries. Journal of biomechanics, 29(2):207–215, 1996.
[18] D.V. Sakharov, L.V. Kalachev, and D.C. Rijken. Numerical simulation of
local pharmacokinetics of a drug after intravascular delivery with an eluting
stent. J. Drug Targ., 10(6):507–513, 2002.
17
MOX Technical Reports, last issues
Dipartimento di Matematica “F. Brioschi”,
Politecnico di Milano, Via Bonardi 9 - 20133 Milano (Italy)
11/2011
Formaggia, L.; Minisini, S.; Zunino, P.
Stent a rilascio di farmaco: una storia di successo per la matematica
applicata
Formaggia, L.; Minisini, S.; Zunino, P.
Stent a rilascio di farmaco: una storia di successo per la matematica
applicata
10/2011
Zunino, P.; Vesentini, S.; Porpora, A.; Soares, J.S.; Gautieri, A.; Redaelli, A.
Multiscale computational analysis of degradable polymers
09/2011
Pigoli, D.; Sangalli, L.
Wavelets in Functional Data Analysis: estimation of multidimensional
curves and their derivatives
08/2011
Ieva, F.; Paganoni, A.M.; Secchi, P.
Mining Administrative Health Databases for epidemiological purposes:
a case study on Acute Myocardial Infarctions diagnoses
07/2011
Arioli, G.; Gamba, M.
Automatic computation of Chebyshev polynomials for the study of parameter dependence for hyperbolic systems
06/2011
Secchi, Piercesare; Stamm, Aymeric.; Vantini, Simone
Large p Small n Data: Inference for the Mean
05/2011
Arioli, Gianni; Gamba, Monica
An algorithm for the study of parameter dependence for hyperbolic systems
04/2011
Ieva, Francesca ; Paganoni, Anna Maria; Pigoli, Davide;
Vitelli, Valeria
Multivariate functional clustering for the analysis of ECG curves morphology
03/2011
Garegnani, Giulia; Rosatti, Giorgio; Bonaventura, Luca
Mathematical and Numerical Modelling of Fully Coupled Mobile Bed
Free Surface Flows