Dalmine, 09-03-2017
Dipartimento di
Ingegneria
Ingegneria dei sistemi di
Controllo
Università degli Studi di Bergamo
Dipartimento di Ingegneria dell’Informazione
Ermidoro Michele
1
Come possiamo agire
sul sistema?
Cosa è un attuatore?
Gli attuatori, all’interno dei sistemi automatici, sono il
corrispettivo dei nostri muscoli.
Essenzialmente, accettano un comando (tipicamente
elettrico) e producono un cambio nel sistema, generando
calore, forza, movimento, flusso ecc.
Tipicamente, lavorano accoppiati con alimentazione e
sistema meccanico:
Classificazione di
attuatori
Che tipologie di attuatori esistono?
Tipo di energia
Tipo di output
•
Elettrica
•
Binario
•
Elettromeccanica
•
Continuo
•
Pneumatica
•
Idraulica
•
Elettromagnetica
•
“Materiali speciali”
Elettrici
Sono gli attuatori tipicamente utilizzati per le operazioni di ON/OFF
Utilizzano l’energia elettrica per avviare qualsiasi altro tipo di
device/sistema.
Sono tipicamente binari
•
•
•
•
•
•
•
Diodi
Tiristori
BJT
Triac
MOSFET / PMOSFET
Relay a stato solido
…
Caratteristiche principali
•
•
•
•
Tipo Elettronico
Altissima frequenza di risposta
Basso consumo di potenza
Binari
Elettromeccanici
MOTORI – DC – AC - STEPPER
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Pneumatici
Tipicamente vanno a fornire un movimento lineare
Il movimento lineare è fornito tramite l’utilizzo di un piston che viene
spostato dall’aria
Lavorano tipicamente associate ad una valvola
Caratteristiche principali
•
•
•
•
Basse/medie forze
Spinta breve
Movimentazioni molto
veloci
Uscita continua
Idraulici
Tipicamente vanno a fornire un movimento lineare
Il movimento lineare è fornito tramite l’utilizzo di un pistone che viene
spostato da un fluido non comprimibile (olio tipicamente)
Lavorano tipicamente associati ad una valvola
Caratteristiche principali
•
•
•
•
•
Grandi forze
Lunghe corse
Mediamente più lenti
Più costosi da
mantenere
Uscita continua
Elettromagnetici
Gli attuatori elettromagnetici sono tipicamente composti da un
solenoide
Un nucleo di ferro è inserito all’interno di un coil in cui scorre corrente.
Una volta energizzato il campo magnetico spingerà il nucleo verso
l’esterno.
Caratteristiche:
•
•
•
Elevata forza per un
breve tempo
Ideali per On/Off
Uscita binaria
Elettromagnetici
Gli attuatori elettromagnetici sono tipicamente composti da un
solenoide
Vengono usati, prevalentemente nelle valvole di controllo direzione
Esempio: Valvola 5/2
Materiali speciali
Gli attuatori sfruttano delle proprietà “speciali” dei materiali.
Tipicamente sono embeddati nella struttura del sistema
Parliamo di attuatori piezoelettrici, magnetostrittivi, elettroreologici ecc..
Caratteristiche piezo:
•
•
Alta frequenza ma spostamento
breve
Alta risoluzione
Motore Piezoelettrico
Micro e Nano attuatori
Sono MEMS che sfruttano lo stesso processo di costruzione della
microelettronica (silicio)
Possono costruire valvole, motori o pompe
Da utilizzare solo in determinate applicazioni
Criterio di scelta
Spesso è vincolato dai requisiti di potenza e dai vincoli di coupling
meccanico.
Alcuni criteri di scelta:
• Range di movimento
• Risoluzione
• Accuratezza
• Picchi di forza/coppia
• Dissipazione calore
• Risposta in frequenza
• Caratteristiche elettriche
Attuatori elettrici
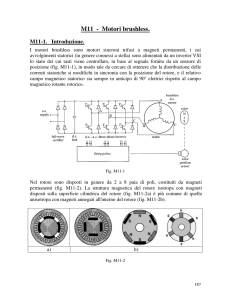
Motori Elettrici - introduzione
I motori elettrici, comunemente definiti macchine elettriche (EM), sono
dispositivi in grado di convertire l’energia elettrica in energia meccanica e
viceversa.
Tutte le macchine elettriche si basano sulla medesima idea (benchè con
approcci diversi):
È il campo magnetico a permettere l’interazione tra l’energia elettrica e
quella meccanica.
Basi di
elettromagnetismo
Elettromagnetismo - fondamenti
I fenomeni elettromagnetici rendono possibile la conversione di energia elettrica in
meccanica e viceversa.
Partendo dalla base:
un conduttore rettilineo, ipoteticamente di lunghezza infinita, percorso da corrente genera un
campo magnetico le cui linee di forza sono concentriche e ortogonali al conduttore, con una
intensità proporzionale alla corrente e inversamente proporzionale alla distanza
i
H
𝐻=
𝑖
2𝜋𝑟
Elettromagnetismo - fondamenti
In una spira circolare di raggio R, il campo magnetico dipendente da z
𝑖
𝑅2
(distanza dal centro) è:
𝐻= ∙
3
2
2
2
𝑅 +𝑧 2
In 𝑧 = 0:
𝑖
2𝑅
Generalizzando il risultato ad un solenoide di n spire, con densità di spire
N(spire/lunghezza), e considerando la lunghezza del solenoide >> rispetto al
raggio della spira, abbiamo che:
𝐻=
𝐻 = 𝑖𝑁
Elettromagnetismo - fondamenti
Il vettore di induzione magnetica è un vettore proporzionale al campo magnetico secondo una
costante (µ) dipendente dal mezzo in cui agisce il campo magnetico
𝑩 = 𝝁𝑯 [𝑻]
Il flusso magnetico è definito come l’integrale del vettore induzione attraverso una
superficie A
𝑨
𝜱=
𝑩 ∙ 𝒏 𝒅𝒂
α
Nel caso di induzione uniforme attraverso area piana:
B
n
Φ = 𝐵𝐴𝑐𝑜𝑠𝛼
A
Leggi fondamentali
Legge di Hopkinson:
E’ l’analogo della legge di Ohm, riferita ai circuiti magnetici
È costante il rapporto tra la forza magneto-mortice ed il flusso magnetico
Ohm 𝑉 = 𝑅 ∙ 𝐼
Hopkinson 𝑀 = ℛ ∙ Φ
• M: forza magneto-motrice
• Φ: flusso magnetico
• ℛ: riluttanza (misurata in Henry^-1)
La riluttanza dipende dal volume e dalla permeabilità magnetica del materiale
1 𝑙
ℛ= ∙
𝜇 𝐴
Riluttanza di un cilindro di lunghezza l e sezione A.
Leggi fondamentali
spostamento
Leggi fondamentali
Leggi fondamentali
Legge di Faraday-Lenz:
𝒅𝚽
𝒇𝒆𝒎 = −
𝒅𝒕
La fem indotta è pari all’opposto della derivata temporale del flusso magnetico concatenato.
Esempio: un aumento di flusso dovuto a una crescita di corrente nel
circuito provoca una fem con segno opposto che si oppone a questo
𝑩
fem
aumento di corrente. In generale le fem indotte hanno verso tale da
contrastare il processo induttivo che le genera
spostamento
Legge di Lorentz:
𝑭 = 𝒒𝒗 × 𝑩
Una corrente che si muove in un campo magnetico genera
una forza meccanica
Motori
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici - Asincroni
Componenti:
•
•
Statore: cilindro di materiale ferromagnetico munito
di cave in cui sono alloggiati avvolgimenti che
vengono alimentati con corrente trifase.
Rotore: cilindro ferromagnetico in cui è inserito un
circuito elettrico costituito da sbarre di rame o
alluminio.
Principio di funzionamento:
1.
La corrente trifase che percorre lo statore genera un
campo magnetico rotante alla velocità angolare
2𝜋𝑓
𝜔0 =
, con f frequenza di alimentazione e p paia
𝑝
2.
3.
4.
di poli.
Nel rotore, per la legge di Faraday si inducono delle
correnti, che generano a loro volta un campo
magnetico rotante.
Il rotore, è percorso da una corrente ed è immerso
in un campo magnetico. Viene quindi indotta una
forza (Legge di Lorentz).
La rotazione del campo magnetico statorico fa si che
le forze indotte provochino la rotazione del rotore.
Esso roterà ad una velocità 𝜔 < 𝜔0 ; da qui il termine
motore asincrono.
Motori Elettrici - Asincroni
Proprietà:
•
•
•
•
•
•
Detto anche ad induzione per via del processo che ne provoca il funzionamento;
Alimentato direttamente dalla rete in corrente alternate, monofase o trifase;
Bassi costi manutentivi;
Molto utilizzato in ambito industriale, la sua velocità di rotazione dipende
dalla frequenza di alimentazione;
Autoavviante (se alimentato con trifase)
La differenza tra la velocità del campo magnetico e la velocità
del rotore è detta slip. Se le velocità di rotore e del campo
magnetico sono uguali (slip = 0), il motore produce coppia nulla
e rallenta.
Controllo:
•
•
•
Controllo V-F: variando la tensione e la frequenza di
alimentazione si possono modificare le curve di coppia;
Variazione numero poli: variando p (se il motore lo permette)
può essere variata la velocità del campo magnetico;
Il motore asincrono prevede (per via della sua costruzione)
una retroazione interna in velocità dovuta alla BEMF.
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici - Sincroni
Componenti:
•
•
Statore: cilindro di materiale ferromagnetico munito di cave in
cui sono alloggiati avvolgimenti (similare allo statore del
motore asincrono);
Rotore: esistono diverse tipologie costruttive differenti tra loro:
• A riluttanza;
• A magneti permanenti;
• A rotore avvolto.
Principio di funzionamento:
1.
2.
3.
4.
5.
La corrente trifase che percorre lo statore genera un campo
magnetico che in un certo istante ha un orientamento 𝛼𝑠 .
Il rotore si troverà in posizione 𝛼𝑟 , provocando uno
sfasamento geometrico (espresso in gradi elettrici):
𝛼𝑒 = 𝛼𝑟 − 𝛼𝑠 𝑝
I campi di rotore e statore tendon ad allinearsi, generando una
coppia C pari a:
• 𝐶 = 𝐶𝑚𝑎𝑥 sin 𝛼𝑒 - magneti permanenti
• 𝐶 = 𝐶𝑚𝑎𝑥 sin 2𝛼𝑒 - a riluttanza
Se non si supera 𝐶𝑚𝑎𝑥 il rotore viene trascinato alla stessa
velocità del campo magnetico statorico, da qui il nome motori
sincroni.
I motori sincroni non sono autoavvianti, ma garantiscono
elevate prestazioni.
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici
sincroni sinusoidali
Sono motori nati per essere utilizzati con 220v 50Hz, ormai in disuso.
Sono presenti spazzole per alimentare il rotore.
+
Elettronica di controllo semplice
-
Presenza di spazzole per l’eccitazione rotorica
-
Basso rapporto peso/potenza
-
Alta Complessità/Costo di produzione
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici
sincroni - stepper
Sono motori utilizzati per una movimentazione con elevata precisione angolare e
ridotta velocità.
3.6°
+
+
-
7.2°
10.5°
Elevata precisione
Elevata coppia
Elettronica di controllo complessa (ponte H per ogni fase)
Ridotta velocità di rotazione
Recupero energetico solo con nucleo magnetizzato
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici
sincroni - riluttanza
Sono motori che sfruttano la tendenza del rotore a posizionarsi (rispetto allo statore)
sempre nella posizione a minima riluttanza.
+
+
+
-
Rotore a peso ridotto
Elevata robustezza
Ridotto costo di produzione
Algoritmo di controllo complesso (sistema non lineare)
Ridotta coppia nominale
Elevata rumorosità
Non è possibile la generazione
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Stepper
Brushless
Brushless
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici – Sincroni
Brushless a magneti permanenti
Costruttivamente rotore e statore possono essere posizionati come segue:
Rotore interno
STATORE
ROTORE
Rotore esterno
ROTORE
STATORE
Motori Elettrici – Sincroni
Brushless a magneti permanenti
Il numero di coppie polari può essere stabilito a livello costruttivo:
Basso numero di coppie
polari
Alto numero di coppie
polari
Motori Elettrici - introduzione
I magneti possono essere installati in due diverse configurazioni:
Magneti Permanenti
Superficiali (SPM)
Magneti Permanenti
Interni (IPM)
Motori Elettrici – Sincroni
Brushless a magneti permanenti
I motori possono essere progettati per velocità elevate oppure per coppie elevate, ad esempio:
Elevati RPM
Bassa coppia
Specifiche:
Potenza max.: 5000W
Dimensioni: 76mm x 49mm
Peso: 427g
Giri max.: 20000 RPM
Bassi RPM
Elevata coppia
Specifiche:
Potenza max.: 5000W
Dimensioni: 126mm x 206mm
Peso: 11 kg
Giri max.: 5000 RPM
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici – DC
Introduzione
La macchina in corrente continua (brevemente macchina in CC o macchina in DC) è
stata la prima macchina elettrica realizzata, ed è tuttora utilizzata ampiamente per
piccole e grandi potenze, da generatore o da motore. Sono a corrente continua (o
comunque alimentabili in corrente continua) numerosi motori di piccola potenza per
usi domestici, come anche motori per trazione ferroviaria e marina della potenza di
molte centinaia di kW.
Tutte le macchine CC (a magneti permanenti e non) hanno un comportamento
reversibile ( motore/generatore ).
Si dividono principalmente in due classi, che si differenziano per la distribuzione di
energia all’interno del rotore:
• Brushless Motor: nello statore circola la corrente che genera il campo magnetico
che trascina il rotore;
• Brushed Motor: lo statore genera un campo magnetico fisso e nel rotore viene
fatta scorrere una corrente – necessità spazzole.
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
brushed
Sincroni
Universali
Sinusoid.
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Elettrici - introduzione
Dalla legge di Lorentz:
𝑑𝐿
𝑑𝐹 = 𝑑𝑞
×𝐵
𝑑𝑡
𝑑𝐹 = 𝐼𝑑𝐿 × 𝐵
𝑭 = 𝑰𝑳 × 𝑩 = 𝑰𝑳𝑩 𝐬𝐢𝐧 𝜽
Da cui si può ottenere la coppia applicata alla
spira percorsa dalla corrente
𝝉 = 𝑭 𝐜𝐨𝐬 𝜶 × 𝒘 = 𝑩𝑰𝑳𝒘 𝐜𝐨𝐬 𝜶 𝒔𝒊𝒏𝜽
= 𝑩𝑰𝑳𝒘 𝐜𝐨𝐬 𝜶
• 𝜽 si può ipotizzare pari a 90°.
• Ovviamente la coppia applicata alla spira si
annulla in corrispondenza di 𝜶 = 𝟗𝟎°.
Motori Elettrici - introduzione
Aumentando il numero di spire, ed eccitando la spira opportuna,
possiamo ottenere la rotazione continua desiderata
Motori Elettrici – BACK EMF
BEMF o back electromotive force (Forza controelettromotrice) è un voltaggio
che si oppone alla corrente che induce il movimento.
• La corrente scorre in campo magnetico e genera una forza (legge di
Lorentz)
• Il motore si mette in rotazione
• La rotazione della spira comporta una variazione di flusso al suo interno
che induce una tensione
• La tensione si oppone al fenomeno che l’ha creata [la corrente] (legge di
Faraday-Lenz)
• La BEMF può essere quindi vista come un generatore di tensione opposta
alla tensione di alimentazione
Motori Elettrici – BACK EMF
BEMF o back electromotive force (Forza controelettromotrice) è un voltaggio
che si oppone alla corrente che induce il movimento.
• La BEMF può essere quindi vista come un generatore di tensione opposta
alla tensione di alimentazione
• Al crescere della velocità la corrente motore diminuirà
• Velocità a vuoto Coppia nulla [no load speed]
La BEMF dipende da:
• Velocità di rotazione
• Flusso magnetico statorico
• Parametri costruttivi del motore
Brushed DC motor - Model
Campo magnetico dei
mag permanenti
Modellizzazione
avvolgimenti rotore
Tensione applicata al
rotore
Back EMF
Brushed DC motor –
Modello Elettrico
•
•
•
•
•
𝑒: BEMF
𝑘𝑣 : costante di velocità
del motore
𝑖: corrente rotore
𝜃: velocità angolare rotore
Φ𝑠 : flusso magnetico dei
magneti permanenti
Applicando le leggi di Kirchoff:
𝑉𝑖𝑛 − 𝑉𝑅 − 𝑉𝐿 − 𝑒 = 0
La back EMF è definita come:
𝑒 = −𝑘𝜗Φ𝑠 = −𝑘𝑣 𝜗
Approssimazione valida per un numero elevato di spire, con 𝑘𝑣 costante di velocità dipendente dal flusso dei magneti
permanenti, dalla riluttanza delle armature e dal numero di spire.
Sostituendo si ottiene l’equazione differenziale che governa le caratteristiche elettriche del
motore:
𝑽𝒊𝒏 − 𝒊𝑹 − 𝑳
𝒅𝒊
− 𝒌𝒗 𝝑 = 𝟎
𝒅𝒕
Brushed DC motor –
Modello Meccanico
•
•
•
•
•
•
𝜏𝐿 : coppia di carico
𝑘𝑡 : costante di coppia del
motore
𝑖: corrente rotore
𝐽: inerzia del rotore
𝑏: coefficient attrito
viscoso
𝜃: velocità angolare rotore
Applicando un bilancio di coppie:
𝜏𝑒 − 𝜏𝐽 − 𝜏𝜔 − 𝜏𝐿 = 0
La coppia elettrica è:
𝜏𝑒 = 𝑘 𝑡 𝑖
La coppia dovuta all’accelerazione angolare è:
𝜏𝐽 = 𝐽𝜃
La coppia dovuta all’attrito è:
𝜏𝜔 = 𝑏 𝜃
L’equazione differenziale che rappresenta le caratteristiche meccaniche è dunque:
𝑘𝑡 𝑖 − 𝐽𝜃 − 𝑏𝜃 − 𝜏𝐿 = 0
Brushed DC motor –
Modello
𝑽𝒊𝒏 − 𝒊𝑹 − 𝑳
𝒅𝒊
− 𝒌𝒗 𝝑 = 𝟎
𝒅𝒕
𝒌𝒕 𝒊 − 𝑱𝜽 − 𝒃𝜽 − 𝝉𝑳 = 𝟎
Applicando Laplace:
𝟏
𝑰 𝒔 =
∙ (𝑽𝒊𝒏 − 𝒌𝒗 𝛀 𝒔 )
𝑹 + 𝑳𝒔
𝚯 𝒔 =
𝟏 𝟏
∙ (𝑲𝒕 𝑰(𝒔) − 𝝉𝑳 (𝒔))
𝒔 𝒃 + 𝑱𝒔
Volendo analizzare lo schema a blocchi tra tensione e velocità angolare del rotore, abbiamo
che:
𝝉𝑳
𝑽𝒊𝒏 +
−
1
𝑅 + 𝐿𝑠
𝑰
𝐾𝑡
−
+
𝐾𝑣
1
𝑏 + 𝐽𝑠
𝛀 𝒔
1
𝑠
𝚯 𝒔
Brushed DC motor –
Modello
𝝉𝑳
𝑽𝒊𝒏 +
−
1
𝑅 + 𝐿𝑠
𝑰
𝐾𝑡
−
+
1
𝑏 + 𝐽𝑠
𝛀 𝒔
1
𝑠
𝚯 𝒔
𝐾𝑣
𝜴 𝒔
𝐾𝑡
=
𝑽𝒊𝒏 (𝒔)
𝑹 + 𝑳𝒔 𝒃 + 𝑱𝒔 + 𝐾𝑡 𝐾𝑣
𝜴 𝒔
𝑹 + 𝑳𝒔
=
𝚻𝑳 (𝒔)
𝑹 + 𝑳𝒔 𝒃 + 𝑱𝒔 + 𝐾𝑡 𝐾𝑣
•
•
•
•
•
•
•
•
•
•
𝑘𝑡 : costante di coppia del motore
𝑘𝑣 : costante di velocità del motore
L: induttanza equivalente degli
avvolgimenti
R: resistenza equivalente degli
avvolgimenti
𝐽: inerzia del rotore
𝑏: coefficient attrito viscoso
𝛺 𝑠 : velocità angolare rotore
𝜃: velocità angolare rotore
𝑉𝑖𝑛 𝑠 : tensione sull’armatura
Τ𝐿 : coppia di carico
Brushed DC motor –
Considerazioni
• Le costanti 𝑘𝑡 e 𝑘𝑣 assumono lo stesso valore numerico (K) ed hanno unità di misura
equivalente.
• La coppia generata è proporzionale alla corrente d’armatura.
• La forza controelettromotrice è direttamente proporzionale alla velocità di rotazione dal
rotore.
• Alla velocità a vuoto (𝜔0 ) la bemf eguaglia la tensione in ingresso, producendo una coppia
nulla.
• La Potenza meccanica resa è massima in corrispondenza
𝜔
di 𝜔 = 20.
• A parità di tensione la coppia è inversamente
proporzionale alla velocità di rotazione.
• L’equazione della curva caratteristica statica del motore
in c.c a magneti permanenti è:
𝐶𝑚 = 𝐾
𝑉𝑖𝑛
𝑅
𝐾
−𝑅𝜔
• Il rendimento è massimo per 𝜔 = 𝜔0
Curva di coppia C – Potenza
meccanica W – rendimento η
TENSIONE COSTANTE
Brushed DC
attuazione
Brushed DC motor –
Considerazioni
𝜴 𝒔
𝐾𝑡
=
𝑽𝒊𝒏 (𝒔)
𝑹 + 𝑳𝒔 𝒃 + 𝑱𝒔 + 𝐾𝑡 𝐾𝑣
𝜴 𝒔
𝑹 + 𝑳𝒔
=
𝚻𝑳 (𝒔)
𝑹 + 𝑳𝒔 𝒃 + 𝑱𝒔 + 𝐾𝑡 𝐾𝑣
Variando la tensione sono in grado
di modificare la velocità angolare
del motore
Come modificarla?
Regolatore di tensione
• Richiede elettronica specifica
• Costo energetico alto (effetto
Joule)
PWM
• Comandato direttamente da un
microcontrollore
• Facilmente comandabile
Brushed DC motor –
Regolazione tensione
Brushed DC motor –
PWM
Brushed DC motor –
PWM
La modulazione di larghezza di impulso (o PWM, acronimo del corrispettivo inglese pulsewidth modulation), è un tipo di modulazione digitale che permette di ottenere una tensione
media variabile dipendente dal rapporto tra la durata dell'impulso positivo e di quello negativo
(duty-cycle).
𝑇𝑜𝑛
𝑉𝑝 40
[V]
30
𝑇
20
𝑉
10
0
0
5
10
15
20
25
[ms]
Frequenza:
Duty Cycle:
1
𝑓=
𝑇
𝑇𝑜𝑛
𝐷=
∗ 100 [%]
𝑇
Valore Medio:
𝑉 = 𝐷 × 𝑉𝑝
Brushed DC motor –
PWM
Per estrapolare un valore compreso tra 0 e Vp il circuito a cui è connessa la linea PWM dovrà
filtrare il segnale in ingresso.
Condizione per un buon filtraggio:
𝑓𝐿𝑃 ≪ 𝑓𝑜
N.B.: Il filtraggio viene effettuato dal
motore stesso!
Se il motore è in grado di filtrare il segnale a partire dal Duty Cycle è possibile regolare la
tensione ai capi dei morsetti.
Brushed DC motor –
PWM
Hardware
Il motore DC (brushed), ha un unico avvolgimento alimentato; per questo motivo è sufficiente un
inverter a singolo ramo per una rotazione in singolo senso. Per una rotazione in entrambi i sensi,
è necessario un inverter a due rami.
CW
2-ph PRE
DRIVER
CCW
Brushed DC motor –
PWM
Hardware
Interponendo il carico fra due Half-Bridge comandati in anti-fase è possibile fornire al
carico tensioni sia positive che negative
+ Vbatt
+ Vbatt
𝑫
𝑣𝐿𝑃 = 𝑣𝐿𝑃_1 - 𝑣𝐿𝑃_2
R
L
𝟏−𝑫
𝑫
𝒊
GND
𝑣𝐿𝑃_2 = 𝑉𝑏𝑎𝑡𝑡 ∗ (1 − 𝐷)
𝑣𝐿𝑃_1 = 𝑉𝑏𝑎𝑡𝑡 ∗ 𝐷
GND
10
LP
𝑣𝐿𝑃 = 𝑣𝐿𝑃1 - 𝑣𝐿𝑃2
[v]
5
0
V
MCU
𝟏−𝑫
= 𝑉𝑏𝑎𝑡𝑡 ∙ 2𝐷 − 1
-5
-10
0
10
20
30
40
50
D [%]
60
70
80
90
100
Brushed DC motor –
ponte H e diodi ricircolo
Tipica struttura:
𝑉𝐶𝐶
DIODI DI RICIRCOLO:
Il motore ha un carico induttivo. Ogni volta che al
coil del motore viene tolta alimentazione,
l’energia magnetica immagazzinata deve trovare
una via per scaricarsi.
𝐼𝑛1
Questo provoca picchi di tensione che dal
motore risalgono verso I MOSFET di commando,
uccidendoli miserabilmente.
I diode forniscono una via di scarica. In essi
l’energia magnetica è dissipata in forma di calore.
𝐼𝑛2
Brushed DC motor –
controllo di coppia
Il controllo in coppia, all’interno di un motore DC a magneti permanenti,
corrisponde a controllarne la corrente. Ricordando la coppia elettrica:
𝝉𝒆 = 𝒌𝒕 𝐢
+ Vbatt
𝑫
𝑫
MOS
DRIVER
𝑖 ∗ 𝑅𝑆𝐸𝑁𝑆𝐸
𝟏−𝑫
R
GND
𝒊
A
MCU
L
𝟏−𝑫
𝑫
MOS
DRIVER
+ Vbatt
𝑫
GND
Il controllo di questi
motori è molto semplice:
la normalità tra campo
magnetico e rotore è
garantita
meccanicamente (dalla
presenza delle spazzole).
Brushed DC motor –
controllo di coppia
Controllo
Il software di controllo è, di fatto, un regolatore PI.
Current ref.
𝐾𝑖
𝑠
Voltage ref.
Motor driver
PWM
Motor
𝐾𝑝
Current
Brushed DC motor –
controllo di coppia
Controllo
Il software di controllo è, di fatto, un regolatore PI.
𝝉𝑳
𝑽𝒊𝒏
+
1
𝑅 + 𝐿𝑠
−
−
𝑰
𝐾𝑡
+
𝐾𝑣
1
𝑏 + 𝐽𝑠
𝛀 𝒔
1
𝑠
𝚯 𝒔
Brushed DC motor –
controllo di coppia
Controllo
Il software di controllo è, di fatto, un regolatore PI.
𝝉𝑳
𝑽𝒊𝒏 +
−
+
1
𝑅 + 𝐿𝑠
−
𝑰
𝐾𝑡
+
+
−
PI
+
𝑰𝒓𝒆𝒇
𝐾𝑣
1
𝑏 + 𝐽𝑠
𝛀 𝒔
1
𝑠
𝚯 𝒔
Brushed DC motor –
controllo di velocità
La velocità ha la seguente dipendenza dalla tensione:
𝜴 𝒔
𝐾𝑡
=
𝑽𝒊𝒏 (𝒔)
𝑹 + 𝑳𝒔 𝒃 + 𝑱𝒔 + 𝐾𝑡 𝐾𝑣
Per controllare la velocità ho quindi diverse alternative:
• Variare la tensione di alimentazione
• Variare la resistenza di armatura collegando un reostato in serie
𝐾𝑖
𝑠
Speed ref.
𝐾𝑑 𝑠
Voltage ref.
Motor driver
PWM
Motor
𝐾𝑝
Speed
Brushed DC motor –
controllo di velocità
Come leggere la velocità?
• Encoder
• Tachimetro
• BEMF
𝝉𝑳
𝑽𝒊𝒏 +
−
+
1
𝑅 + 𝐿𝑠
−
𝑰
𝐾𝑡
+
−
−
1
𝑏 + 𝐽𝑠
𝛀 𝒔
𝚯 𝒔
1
𝑠
+
𝐾𝑣
PID
𝑽𝒓𝒆𝒇
Brushed DC motor –
misura velocità - BEMF
BEMF?
Motori Brushless
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Brushless
I motori Brushless sono delle macchine sincrone (AC/DC), in cui il campo
magnetico statorico ed il rotore ruotano alla stessa velocità.
Sono caratterizzati dal non avere le spazzole
Statore:
Rotore:
Lo statore è composto da cave in cui
sono alloggiati gli avvolgimenti che
andranno a creare il campo magnetico
rotante. Di conseguenza è alimentato da
tre tensioni sfasate.
Il rotore tipicamente è composto da
magneti permanenti, che generano un
campo magnetico costante.
Motori Brushless - DC
Questa tipologia di motori, detti BLDC, sono caratterizzati dall’avere una bemf
con forma trapezoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti con avvolgimenti concentrati:
Il flusso dipende dalla
«geometria» del traferro.
Motori Brushless - DC
Questa tipologia di motori, detti BLDC, sono caratterizzati dall’avere una bemf
con forma trapezoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti con avvolgimenti concentrati:
Il flusso dipende dalla
«geometria» del traferro.
Motori Brushless - DC
Questa tipologia di motori, detti BLDC, sono caratterizzati dall’avere una bemf
con forma trapezoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti con avvolgimenti concentrati:
Il flusso dipende dalla
«geometria» del traferro.
Motori Brushless - DC
Questa tipologia di motori, detti BLDC, sono caratterizzati dall’avere una bemf
con forma trapezoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti con avvolgimenti concentrati:
Il flusso dipende dalla
«geometria» del traferro.
Motori Brushless - DC
Questa tipologia di motori, detti BLDC, sono caratterizzati dall’avere una bemf
con forma trapezoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti con avvolgimenti concentrati:
Il flusso dipende dalla
«geometria» del traferro.
Motori Brushless - DC
BEMF trapezoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
Motori Brushless - DC
BEMF trapezoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
Motori Brushless - DC
BEMF trapezoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
Motori Brushless - DC
BEMF trapezoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
• Ritardo di 90°
• Segno opposto (principio della
bemf)
• Forma trapezoidale
Motori Elettrici - Classificazione
Motori
elettrici
AC
Asincroni
A spazzole
A più fasi
A singola
fase
DC
DC
brushed
Sincroni
Universali
Sinusoid.
Brushless
Brushless
Stepper
Riluttanza
Gabbia di
scoiattolo
Cond.
fisso
Split phase
Rotore
avvolto
Riluttanza
variabile
Riluttanza
sincrona
Rotore
avvolto
Avvio a
cond.
Shaded
pole
Rotore a
m. perm.
Magneti
perm.
Riluttanza
commut.
Synchros
Funzion. a
cond.
Riluttanza
variabile
Cond.
rotante
Ibrido
Motori Brushless - AC
Questa tipologia di motori, sono caratterizzati dall’avere una bemf con forma
sinusoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti «sinusoidali» con avvolgimenti concentrati:
Il flusso dipende dalla «geometria» del traferro.
Modifico la «distribuzione volumetrica» dei magneti.
Motori Brushless - AC
Questa tipologia di motori, sono caratterizzati dall’avere una bemf con forma
sinusoidale.
Questo avviene per via di come è costruito il motore:
Magneti permanenti con avvolgimenti distribuiti:
Soluzione
ideale
Soluzione
approssimata
Motori Brushless - AC
BEMF sinusoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
Motori Brushless - AC
BEMF sinusoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
Motori Brushless - AC
BEMF sinusoidale:
La bemf dipende dal flusso. In particolare si
oppone al principio che l’ha generata.
La direzione p data dalla regola della mano
sinistra.
• Ritardo di 90°
• Segno opposto (principio della
bemf)
• Forma sinusoidale
Motori BLDC
Controllo