M11 - Motori brushless.
M11-1. Introduzione.
I motori brushless sono motori sincroni trifasi a magneti permanenti, i cui
avvolgimenti statorici (in genere connessi a stella) sono alimentati da un inverter VSI
lo stato dei cui tasti viene controllato, in base al segnale fornito da un sensore di
posizione (fig. M11-1), in modo tale da cercare di ottenere che la distribuzione delle
correnti statoriche si modifichi in sincronia con la posizione del rotore, e il relativo
campo magnetico statorico sia sempre in anticipo di 90° elettrici rispetto al campo
magnetico rotante rotorico.
Fig. M11-1
Nel rotore sono disposti in genere da 2 a 8 paia di poli, costituiti da magneti
permanenti (fig. M11-2). La struttura magnetica del rotore isotropa con magneti
disposti sulla superficie cilindrica del rotore (fig. M11-2a) è più comune di quella
anisotropa con magneti annegati all'interno del rotore (fig. M11-2b).
a)
b)
Fig. M11-2
187
Dal punto di vista funzionale i motori brushless possono essere considerati motori
c.c. a magneti permanenti con commutatore elettronico (fig. M11-3).
Fig. M11-3
Sia nei motori c.c. che nei motori brushless i fasori rappresentativi dei campi statorico
e rotorico risultano sfasati di 90° elettrici (fig. M11-4).
Nei motori c.c., in cui il campo prodotto dai magneti permanenti statorici è
stazionario, il campo prodotto dalle correnti che circolano negli avvolgimenti rotorici
viene mantenuto stazionario dall'azione del commutatore meccanico che,
modificando il senso della corrente nei conduttori che attraversano il piano di
commutazione, converte la corrente da continua in alternata con frequenza legata alla
velocità di rotazione e mantiene quindi una distribuzione del campo rotorico
mediamente sempre perpendicolare a quella del campo statorico.
Nei motori brushless, in cui il campo prodotto dai magneti permanenti rotorici è
ruotante, il campo prodotto dalle correnti circolanti nei tre avvolgimenti statorici è
reso ruotante dall'azione dell'inverter.
Fig. M11-4
188
Il campo di applicazione dei motori brushless, anche se attualmente circoscritto a
potenze medio-piccole (≤ 50 kW), è in notevole crescita sia in campo industriale
(macchine utensili a controllo numerico, automazione industriale, robotica), sia in
campo civile (macchine da ufficio, attrezzature mediche, elettrodomestici), sia in
campo aerospaziale, sia nel campo della trazione leggera.
I motori brushless trovano infatti sempre più numerose applicazioni in quanto, a
spese di una certa ondulazione di coppia e di maggiori costi, presentano molti
vantaggi rispetto ai tradizionali motori sia a corrente continua che asincroni. In
particolare richiedono poca manutenzione, non hanno praticamente limitazioni
ambientali, sono molto affidabili e silenziosi, hanno elevate prestazioni dinamiche,
rendimento, rapporto coppia-dimensioni e campo di variazione della velocità,
semplicità di controllo e agevole asportazione del calore.
In relazione alla forma d'onda della f.c.e.m. a regime stazionario (fig. M11-5), che
dipende dalla distribuzione spaziale dell'induzione di traferro e dalla distribuzione dei
conduttori delle tre fasi, si distinguono due tipi di motori:
- brushless trapezoidali, in cui le f.c.e.m. di fase hanno andamenti trapezoidali con
parte piatta dell'onda avente una estensione di 120° elettrici,
- brushless sinusoidali, in cui le f.c.e.m. di fase hanno andamenti sinusoidali.
I primi hanno prestazioni simili a quelle di un servo motore c.c., senza le limitazioni
imposte dal commutatore meccanico. I secondi sono più costosi, ma consentono più
facilmente di minimizzare le inevitabili pulsazioni di coppia inerenti ai brushless
trapezoidali (dalla dolcezza della coppia erogata dipende ad esempio la qualità di
finitura superficiale ottenibile con macchine utensili per la lavorazione dei metalli).
Fig. M11-5
Rispetto al motore sincrono il brushless è autoavviante, in quanto l'alimentazione
degli avvolgimenti di statore, essendo pilotata da un sensore che rileva la posizione
del rotore, è tale da fare sì che il campo magnetico statorico ruoti sempre alla velocità
del rotore; pertanto allo spunto il campo di statore e il rotore acquistano gradualmente
e contemporaneamente velocità.
189
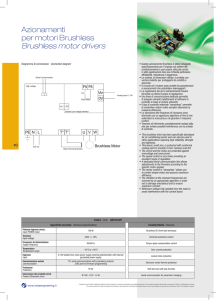
La tabella M11-1 riporta i dati di alcuni servomotori brushless sinusoidali.
Tab. M11-1
190