Guida dell'utente
UD53
Modulo opzionale di
interfaccia resolver
per Unidrive
Codice prodotto: 0460-0054
Numero edizione: 3
Informazioni generali
Il costruttore declina ogni responsabilità derivante da inadeguata,
negligente o non corretta installazione o regolazione dei parametri di
funzionamento dell'apparecchiatura, nonché da errato adattamento
dell'azionamento al motore.
Si ritiene che, al momento della stampa, il contenuto della presente Guida
sia corretto. Fedele alla politica intrapresa di continuo sviluppo e
miglioramento, il costruttore si riserva il diritto di modificare, senza
preavviso, le specifiche o le prestazioni del prodotto, o il contenuto della
presente Guida.
Tutti i diritti riservati. Nessuna parte di questa Guida può essere riprodotta
o trasmessa sotto nessuna forma né con alcun mezzo elettrico o
meccanico, compresi la fotocopia, la registrazione o qualsiasi sistema di
immagazzinamento o di recupero delle informazioni, senza autorizzazione
scritta dell'editore.
Utilizzo all'interno dell'Unione Europea, ecc.
Le informazioni seguenti devono essere tenute in considerazione nei casi in
cui la destinazione d'uso del convertitore si trovi all'interno dell'Unione
Europea, dello Spazio Economico Europeo o di altre regioni in cui siano
applicate direttive del Consiglio dei ministri europeo o misure equivalenti.
Il convertitore è conforme alla direttiva 73/23/EEC sulla bassa tensione.
All'installatore spetta la responsabilità di assicurare che l'apparecchiatura
nella quale viene integrato il convertitore sia conforme alle direttive
pertinenti.
L'apparecchiatura completa in cui viene integrato il convertitore deve
essere conforme alla Direttiva sulla compatibilità elettromagnetica EMC
89/336/EEC.
Nel caso in cui il convertitore venga incorporato in una macchina, il
produttore è tenuto a garantire che tale macchina è conforme alla Direttiva
sui macchinari 89/392/EEC. In particolare, le apparecchiature elettriche
devono essere generalmente conformi alla Norma europea armonizzata
EN60204-1.
Copyright (c) Dicembre 1999 Control Techniques Drives Ltd
Autore:
RFD
Codice di pubblicazione:
53ni3
Data di pubblicazione:
Dicembre 1999
Indice
1
Introduzione
1
1.1
Caratteristiche principali del modulo UD53
1
2
Informazioni sulla sicurezza
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
Avvertenza, Attenzione e Nota
Sicurezza elettrica - avvertenze generali
Progettazione del sistema
Limiti ambientali
Conformità alle normative
Sicurezza del personale
Analisi del rischio
Collegamenti dei segnali
Regolazione dei parametri
2
2
2
3
3
3
4
4
4
3
4
Installazione dell'UD53
Realizzazione dei collegamenti
5
7
4.1
4.2
Ubicazioni dei terminali
Funzioni dei terminali
7
8
5
Impostazione dell'UD53
10
5.1
5.2
5.3
10
10
5.4
5.5
Impostazione iniziale
Offset di fase
Cambiamento di risoluzione della retroazione
in funzione della velocità massima
Uscite dell'encoder simulato (terminali 40, 41, 43, 44)
Uscite degli impulsi di riferimento Z (terminali 46, 47)
6
Parametri correlati
15
6.1
6.2
6.3
Introduzione
Software programmabile
Descrizione dei parametri
15
15
16
12
12
13
A
Specifiche
A.1
A.2
A.3
Terminali
Temperatura e umidità
Resolver
B
C
Allineamento meccanico del resolver
Diagnostica
C.1
Codici di allarme
D
Funzionamento di un resolver
A-1
A-1
A-2
A-2
B-1
C-1
C-1
D-1
1
Introduzione
1.1
Caratteristiche principali del modulo UD53
Applicazioni
Il modulo opzionale piccolo UD53 per resolverè un modulo di interfaccia
installabile in un Unidrive. L'UD53 funziona con resolver aventi le
specifiche seguenti:
Impedenza di ingresso: > 85 a 6 kHz
Rapporto spire (primario:secondario): 3:1 o 2:1
Tensione di eccitazione: 6 V efficaci o 4 V efficaci
L'azionamento deve funzionare nel Modo vettoriale in anello chiuso o nel
Modo servoazionamento in anello chiuso; il resolver collegato all'UD53
viene utilizzato per la retroazione della velocità e della posizione.
Uscite
dell'encoder
simulato
Le uscite dell'encoder simulato producono segnali AB in quadratura
corrispondenti ai conteggi dei fronti provenienti dall'encoder sorgente. In
alternativa, queste uscite possono essere configurate per segnali di
frequenza e di direzione (F/D). In entrambi i casi, le uscite conservano le
informazioni sulla posizione quando viene cambiata la direzione.
Per default, il resolver viene utilizzato come sorgente per le uscite
dell'encoder simulato. In alternativa, è possibile impiegare come sorgente
l'encoder principale (Encoder 1) collegato al connettore a 15 vie tipo D
sull'azionamento.
Il numero di impulsi per giro può essere scalato per fattori di 2.
Installazione
L'UD53 va inserito nel vano del modulo opzionale piccolo dell'Unidrive.
Tutti i collegamenti all'azionamento vengono effettuati mediante un
connettore a più vie, mentre per quelli da apparecchiature esterne si
utilizza una morsettiera a 16 vie inseribile nel modulo UD53.
UD53 User Guide
Issue code: 53ni3
1
2
Informazioni sulla sicurezza
2.1
Avvertenza, Attenzione e Nota
Un riquadro contrassegnato dalla parola Avvertenza contiene
informazioni essenziali per evitare pericoli per l'incolumità delle persone.
Un riquadro contrassegnato dalla parola Attenzione contiene informazioni
necessarie per evitare danni al prodotto o ad altre apparecchiature.
Un riquadro contrassegnato dalla parola Nota contiene le informazioni
necessarie per garantire il corretto funzionamento del prodotto.
2.2
Sicurezza elettrica - avvertenze generali
Le tensioni utilizzate nell'azionamento possono provocare gravi scosse
elettriche e/o ustioni ed essere anche mortali. Fare molta attenzione
quando si lavora sull'azionamento o in un'area ad esso adiacente.
Le avvertenze specifiche sono riportate nei punti pertinenti della presente
Guida dell'utente.
L'installazione deve essere conforme alle leggi pertinenti in materia di
sicurezza in vigore nel paese di utilizzo del prodotto.
L'azionamento contiene condensatori che restano carichi con una tensione
potenzialmente mortale anche dopo avere scollegato l'alimentazione in C.A.
Se l'azionamento è stato precedentemente alimentato, l'alimentazione in
C.A. deve rimanere isolata per almeno dieci minuti prima che il lavoro possa
essere continuato.
2.3
Progettazione del sistema
L'azionamento è stato realizzato come componente a livello professionale
da integrare in un'apparecchiatura o in un sistema completo. Se installato in
modo errato, l'azionamento può comportare rischi per l'incolumità delle
persone. L'azionamento utilizza tensioni e correnti alte, contiene un livello
elevato di energia elettrica accumulata e viene impiegato per controllare le
attrezzature meccaniche che possono causare lesioni.
È necessario prestare la massima attenzione all'impianto elettrico e alle
caratteristiche progettuali del sistema per evitare rischi durante il
funzionamento normale o nel caso di un'anomalia dell'apparecchiatura. La
progettazione, l'installazione, la messa in servizio e la manutenzione devono
essere effettuate da personale con la necessaria formazione professionale
ed esperienza e che abbia letto attentamente queste informazioni sulla
sicurezza e la Guida dell'utente.
Al fine di garantire un funzionamento meccanico sicuro, potrebbe rivelarsi
necessario installare dispositivi di sicurezza supplementari quali congegni
asserviti di blocco elettromeccanici. L'azionamento non deve venire
impiegato in applicazioni con condizioni di sicurezza ridotta senza protezioni
supplementari contro i rischi derivanti da eventuali anomalie di
funzionamento.
2
UD53 User Guide
Issue code: 53ni3
2.4
Limiti ambientali
Si raccomanda di seguire le istruzioni contenute nella presente Guida
all'installazione dell'Unidrive riguardanti il trasporto, il deposito, l'installazione e
l'uso degli azionamenti, nonché di rispettare i limiti ambientali specificati.
Fare in modo che sugli azionamenti non venga esercitata una forza eccessiva.
2.5
Conformità alle normative
L'installatore è ritenuto responsabile della conformità dell'impianto a tutte le
normative pertinenti, come quelle nazionali sui cablaggi, quelle
antinfortunistiche e quelle sulla compatibilità elettromagnetica (EMC). Egli
deve altresì scegliere con grande attenzione la sezione dei conduttori, i
fusibili o altri dispositivi di protezione e le connessioni di messa a terra.
Nella Guida all'installazione dell'Unidrive sono contenute tutte le istruzioni
necessarie per assicurare la conformità alle norme specifiche EMC.
All'interno dell'Unione Europea, tutti i macchinari in cui viene utilizzato
questo prodotto devono essere conformi alle direttive seguenti:
89/392/EEC: Sicurezza dei macchinari
89/336/EEC: Compatibilità elettromagnetica
2.6
Sicurezza del personale
La funzione di STOP dell'azionamento non interrompe le tensioni pericolose
dall'uscita dell'azionamento stesso o da qualsiasi unità opzionale esterna.
I comandi di Arresto e di Avvio e gli ingressi elettrici dell'azionamento non
devono essere considerati sufficienti al fine dell'incolumità del personale. Se
un pericolo per la sicurezza è associato a un avvio imprevisto
dell'azionamento, occorre installare un dispositivo asservito di blocco per
isolare elettricamente l'azionamento stesso dall'alimentazione in c.a. e
quindi evitare che il motore possa essere avviato involontariamente.
Si raccomanda di tenere nella dovuta considerazione le funzioni
dell'azionamento che potrebbero generare pericoli attraverso i comandi
previsti (ad esempio l'Avvio automatico), oppure attraverso un
funzionamento errato dovuto ad anomalie o ad allarme (come
marcia/arresto, marcia avanti/indietro, velocità massima).
In certe condizioni, l'azionamento può improvvisamente interrompere il
controllo del motore. Nel caso in cui il carico del motore possa determinare
l'aumento della velocità del motore stesso (ad esempio gru e argani), è
necessario utilizzare un sistema diverso di frenatura e di arresto (ad esempio
un freno meccanico).
Prima di collegare l'azionamento all'alimentazione in corrente alternata, è
importante che l'utente abbia ben compreso il significato dei comandi e il
loro funzionamento. Se si hanno dubbi, non cercare di regolare
l'azionamento, in quanto un'azione errata potrebbe danneggiare l'impianto e
mettere in pericolo la vita del personale. Leggere attentamente e seguire le
istruzioni contenute nella presente Guida dell'utente.
Prima di effettuare interventi di regolazione sull'azionamento, avvertire il
personale presente in tale area e annotare le regolazioni.
UD53 User Guide
Issue code: 53ni3
3
2.7
Analisi del rischio
In ogni applicazione in cui un'anomalia dell'azionamento potrebbe
comportare un danneggiamento delle apparecchiature, lesioni personali o la
morte, è necessario condurre un'analisi del rischio e, ove opportuno,
adottare ulteriori misure al fine della riduzione di tale rischio, come un
appropriato sistema di sicurezza ausiliario indipendente con funzionamento
elettromeccanico.
2.8
Collegamenti dei segnali
I circuiti di controllo sono isolati dai circuiti di alimentazione
dell'azionamento solo con un isolamento standard conforme a IEC664-1.
L'installatore deve accertarsi che tutti i circuiti esterni di controllo non
possano accidentalmente essere toccati dal personale ricoprendoli con
almeno uno strato isolante classificato per le tensioni di alimentazione in C.A.
Nel caso in cui sia necessario collegare i circuiti di controllo ad altri circuiti
classificati come a tensione molto bassa di sicurezza (SELV) (ad es. quello di
un personal computer), occorrerà installare un'ulteriore barriera isolante al
fine di conservare la classificazione SELV.
2.9
Regolazione dei parametri
Il valore di alcuni parametri incide notevolmente sul funzionamento
dell'azionamento. Per questa ragione, tali parametri non devono essere
modificati senza averne prima valutato attentamente gli effetti sul sistema
controllato. È inoltre opportuno adottare le misure necessarie al fine di
evitare cambiamenti indesiderati dovuti a errore o a manomissioni.
4
UD53 User Guide
Issue code: 53ni3
3
Installazione dell'UD53
Prima di effettuare la procedura seguente, leggere le
Avvertenze all'inizio del Capitolo 2 Installazione
dell'azionamento nella Guida all'installazione dell'Unidrive.
Avvertenza
1
Prima di procedere all'installazione dell'UD53 nell'Unidrive, accertarsi
che l'alimentazione in C.A. sia scollegata dall'azionamento da almeno 10
minuti.
2
Verificare che l'esterno dell'UD53 non sia danneggiato e che il
connettore a più vie non sia sporco né contenga corpi estranei. Non
installare un UD53 sporco o danneggiato all'interno dell'azionamento.
3
Rimuovere il coperchio dei terminali dall'azionamento (per le istruzioni
di rimozione, vedere Installazione dell'azionamento e del filtro RFI nel
Capitolo 2 della Guida all'installazione dell'Unidrive).
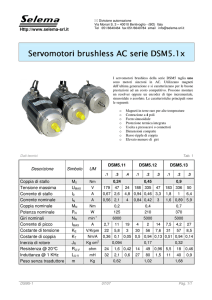
4
Posizionare il connettore a più vie sul retro dell'UD53, sopra il
connettore dell'azionamento (vedere la Figura 1), quindi premere
sull'aletta per inserire l'UD53 in posizione.
5
Reinstallare il coperchio dei terminali sull'azionamento.
6
Collegare l'alimentazione in C.A. all'azionamento.
7
Impostare il parametro .00 su 149 per disattivare la sicurezza.
8
Verificare che il parametro 16.01 sia impostato su 3, a indicare che il
modulo è installato.
9
Se la verifica indicata nel punto 8 ha esito negativo, eseguire quanto
segue:
• Interrompere l'alimentazione in C.A. all'azionamento.
• Attendere almeno 10 minuti.
• Rimuovere il coperchio dei terminali.
• Verificare che l'UD53 sia completamente inserito.
• Reinstallare il coperchio dei terminali.
• Ricollegare l'alimentazione in C.A.
• Verificare nuovamente che il parametro 16.01 sia impostato su 3.
UD53 User Guide
Issue code: 53ni3
5
Figura 1
6
Installazione dell'UD53 nell'azionamento
UD53 User Guide
Issue code: 53ni3
4
Avvertenza
Realizzazione dei collegamenti
I circuiti di controllo sono isolati dai circuiti di
alimentazione dell'azionamento solo con un isolamento
standard conforme a IEC664-1. L'installatore deve
accertarsi che tutti i circuiti esterni di controllo non
possano accidentalmente essere toccati dal personale
ricoprendoli con almeno uno strato isolante classificato per
le tensioni di alimentazione in C.A.
Nel caso in cui sia necessario collegare i circuiti di controllo
ad altri circuiti classificati come a tensione molto bassa di
sicurezza (SELV) ( ad es. quello di un personal computer),
occorrerà installare un'ulteriore barriera isolante al fine di
conservare la classificazione SELV.
4.1
Ubicazioni dei terminali
Figura 2
Ubicazione del connettore nel modulo UD53
UD53 User Guide
Issue code: 53ni3
7
4.2
Funzioni dei terminali
Terminale
8
Funzione
40
Uscita A in quadratura di fase
dell'encoder simulato o
uscita F di frequenza
(collegamento seriale EIA485)
41
Uscita A in quadratura di fase
dell'encoder simulato\o
uscita F di frequenza\
(collegamento seriale EIA485)
42
0V
43
Uscita B in quadratura di fase
dell'encoder simulato o
uscita D di frequenza
(collegamento seriale EIA485)
44
Uscita B in quadratura di fase
dell'encoder simulato\o
uscita D di frequenza\
(collegamento seriale EIA485)
45
0V
46
Uscita Z dell'impulso di riferimento
47
Uscita Z \ dell'impulso di riferimento
48
Ingresso SENO (basso)
49
Ingresso SENO (alto)
50
Ingresso COSENO (basso)
51
Ingresso COSENO (alto)
52
Uscita di eccitazione (alto)
53
Uscita di eccitazione (basso)
54
0V
55
0V
UD53 User Guide
Issue code: 53ni3
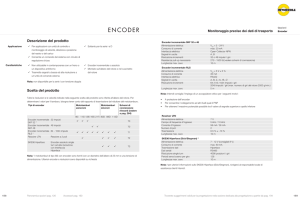
SEN
COS
Eccitazione
Resolver
SEN
COS
Eccitazione
(basso)
(alto)
(basso)
(alto)
(alto)
(basso)
Resolver
Figura 3
UD53
Collegamenti del resolver all'UD53
UD53 User Guide
Issue code: 53ni3
9
5
Impostazione dell'UD53
Le istruzioni fornite nel presente capitolo si riferiscono alla prima
impostazione dell'azionamento con il modulo UD53 inserito.
5.1
Impostazione iniziale
Per default, il modulo UD53 è configurato per funzionare con un resolver
avente un rapporto spire di 3:1. Se il resolver da utilizzare presenta un
rapporto spire di 2:1, impostare il parametro 16.10 Selezione rapporto spire
del resolver su 1.
5.2
Offset di fase
Con il convertitore nel Modo servoazionamento, occorre che l'albero del
resolver sia allineato con l'albero del motore in modo che non vi sia alcun
offset di fase, oppure immettere il valore di offset nel parametro 16.09
Offset di fase del resolver.
L'offset di fase può essere immesso in uno dei modi seguenti:
• Esecuzione della prova di fasatura del resolver. Il modulo UD53
misura automaticamente l'errore di fasatura e immette il valore in
16.09.
• Se si conosce l'offset di fase, è possibile immettere manualmente il
valore nel parametro 16.09.
Vedere anche l'Appendice B Allineamento meccanico del resolver.
Prova di fasatura del resolver
(modo servoazionamento in anello chiuso)
Avvertenza
Durante l'esecuzione della prova di fasatura, l'albero del
motore ruota lentamente. Prima di avviare il convertitore,
assicurarsi che il motore possa funzionare in condizioni di
sicurezza.
Durante l'esecuzione della prova di fasatura, la rotazione dell'albero del
motore si svolge in due stadi, come descritto di seguito:
• Scatto iniziale in posizione fino a 1N di giro
• Successiva rotazione di 4 N di giro
Dove N è il numero dei poli del motore.
Esempi
N. di poli
10
Scatto iniziale
Rotazione successiva
1
2
Fino a 2 di giro
6
Fino a 1 6 di giro
2 giri
2
3
di giro
UD53 User Guide
Issue code: 53ni3
Procedura
1
Accertarsi che il motore sia scollegato dal carico (qualsiasi carico
comporterebbe degli errori nella misurazione dell'offset di fase).
2
Impostare il parametro 16.05 Prova di fasatura resolver su 1.
3
Abilitare l'azionamento.
L'albero del motore ruota (come descritto prima di questa procedura)
e il valore misurato dell'offset di fase viene automaticamente immesso
nel parametro 16.09 Offset di fase resolver. L'albero del motore deve
ruotare in senso orario. Se invece ruota in senso antiorario, invertire
due collegamenti di fase dall'azionamento al motore.
Se si tenta di eseguire una prova di fasatura con un motore che
presenta un'elevata inerzia, l'assenza di smorzamento o un carico
leggero sull'albero, il valore misurato dell'offset di fase non sarà
corretto. Vedere il parametro 5.27nella Guida Unidrive dell'utente per
uso avanzato.
Nota
Se l'azionamento va in allarme e sul display compare il
codice ENC.PH7, la causa è riconducibile a una delle
condizioni indicate sotto:
I collegamenti SEN e COS dal resolver sono errati
La sequenza di fase del motore è invertita
Correggere i collegamenti e ripetere la procedura.
Prova della corrente di magnetizzazione
(vettoriale in anello chiuso)
Vedere Autotaratura nel Capitolo 3 Impostazione dell'azionamento nella Guida
Unidrive dell'utente, oppure il parametro 5.12 nella Guida Unidrive dell'utente per
uso avanzato. Se l'azionamento va in allarme durante l'esecuzione
dell'autotaratura, vedere la Nota sopra.
UD53 User Guide
Issue code: 53ni3
11
5.3
Cambiamento di risoluzione della retroazione
in funzione della velocità massima
I segnali di retroazione del resolver vengono campionati dall'UD53 con una
risoluzione che varia in funzione della velocità massima dell'azionamento.
Tale velocità viene determinata dal valore di 1.06 Velocità massima, nonché di
1.07 Velocità massima marcia indietro quando 1.08 Selezione velocità minima
negativa è impostato su 1.
La risoluzione degli ingressi SEN e COS viene modificata come descritto sotto:
Velocità massima [1.06]
Risoluzione degli
ingressi SEN e COS
GIRI/MIN.
0 ~ 3000
14-bit
3001 ~ 12000
12-bit
>12000
10-bit
Notare che le uscite dell'encoder simulato vengono influenzate dal valore del
parametro 1.06 (e/o 1.07). Vedere Uscite dell'encoder simulato.
5.4
Uscite dell'encoder simulato
(terminali 40, 41, 43, 44)
Le uscite dell'encoder simulato possono essere collegate ad apparecchiature
esterne per monitorare l'uscita di un resolver collegato all'UD53 o
dell'encoder principale (Encoder 1) collegato al connettore a 15 vie di tipo D
sull'azionamento. Per default, il resolver viene utilizzato come sorgente.
Per selezionare l'Encoder 1, impostare il parametro 16.06 Selezione uscita
dell'encoder simulato su 1.
Segnali AB in quadratura, o di frequenza e di direzione
Per default, le uscite dell'encoder simulato sono segnali A e B in quadratura.
Per i segnali di frequenza (F) e di direzione (D), impostare il parametro
16.08 Abilitazione uscite F/D dell'encoder simulato su 1.
12
UD53 User Guide
Issue code: 53ni3
Impulsi per giro
Il numero massimo di impulsi per giro (ppr) delle uscite dell'encoder simulato
dipende dalla risoluzione degli ingressi sen e cos. La risoluzione viene
influenzata dalla velocità massima, che viene impostata nel parametro 1.06
e/o 1.07) come segue:
Velocità massima Risoluzione degli
[1.06]
ingressi sen e cos
giri/min.
Numero massimo di impulsi per
giro delle uscite dell'encoder
simulato
In quadratura
Frequenza e
direzione
14-bit
4096
8192
3001 ~ 12000
12-bit
1024
4096
12000
10-bit
256
1024
0 ~ 3000
Il numero effettivo di impulsi/giro (ppr dipende dalla risoluzione degli
ingressi sen e cos e dal valore del parametro 16.07 Scalatura uscite
dell'encoder simulato.
Se occorre un diverso numero di impulsi/giro (ppr), inserire il valore richiesto
di scalatura nel parametro 16.07 Scalatura uscite dell'encoder simulato. Il
fattore di scalatura si ottiene calcolandolo come segue:
1
2 [16. 07]
5.5
Uscite degli impulsi di riferimento Z
(terminali 46, 47)
L'impulso di riferimento Z viene creato a ogni passaggio del resolver per la
propria posizione zero. Se è richiesto che tale impulso si verifichi in una
posizione diversa, occorre allora riposizionare il resolver sull'albero del
motore. Sarà pertanto necessario cambiare il valore del parametro 16.09
Offset di fase del resolver mediante un mezzo appropriato (vedere Offset di
fase nella parte precedente del presente capitolo).
Le uscite degli impulsi di riferimento Z sono sincronizzate per default con il
quadrante in cui i segnali A e B in quadratura sono entrambi bassi. Quando la
sincronizzazione viene disabilitata, l'impulso di riferimento Z può essere
presente in uno qualsiasi dei quattro quadranti, come descritto qui di
seguito:
A e B entrambi bassi
A e B entrambi alti
A basso e B alto
A alto e B basso
UD53 User Guide
Issue code: 53ni3
13
Versione V03.xx.07 e successive del software del convertitore
Versione 2 e successive dell'UD53
(entrambe presenti)
La sincronizzazione dell'uscita dell'impulso di riferimento Z può essere
disabilitata impostando il parametro 16.12 Disabilitazione sincronizzazione
impulso di riferimento su uscita dell'encoder simulato su 1. La sincronizzazione
viene automaticamente disabilitata quando il parametro 16.07 Scalatura
uscite dell'encoder simulato è impostato su uno dei valori seguenti:
• A un valore per cui la risoluzione delle uscite di simulazione
dell'encoder non sarebbero un numero intero di fronti per giro
(lpr)
• A un valore talmente alto che il numero di fronti per giro (lpr) delle
uscite dell'encoder simulato è inferiore a 1
Il parametro 16.13 Indicatore inattivo di sincronizzazione uscite impulsi di
riferimento Z dell'encoder simulato mostra lo stato di sincronizzazione.
Vedere la tabella logica riportata qui di seguito.
16.07
Impostato per un numero intero di
fronti per giro
Impostato per nessun numero intero
di fronti per giro
16.12
Sincronizzazione
16.13
0
Abilitata
0
1
Disabilitata
1
0
Disabilitata
1
1
Disabilitata
1
Impostato per un valore inferiore a 1
fronte per giro
Versione V03.xx.05 o precedente del software del convertitore
Versione 3 o precedente dell'UD51
(una o entrambe presenti)
Le uscite degli impulsi di riferimento Z sono sincronizzate con le uscite AB in
quadratura dell'encoder simulato unicamente quando la risoluzione delle
uscite AB è pari o superiore a 1 fronte per giro (lpr).
Versione V03.xx.04 o precedente del software del convertitore
Nessuna uscita disponibile dell'encoder simulato.
14
UD53 User Guide
Issue code: 53ni3
6
Parametri correlati
6.1
Introduzione
I parametri elencati in questo capitolo servono per la programmazione e il
monitoraggio dell'UD51 quando lo si inserisce in un azionamento. Per le
istruzioni riguardanti la programmazione, vedere la Guida Unidrive dell'utente.
Prima di cercare di modificare qualsiasi parametro, vedere
le Avvertenze e le Note all'inizio del Capitolo 3 Impostazione
dell'azionamento nella Guida Unidrive dell'utente.
Avvertenza
6.2
Software programmabile
Spiegazione di simboli e abbreviazioni
Tipo di parametro
RO
Di sola lettura
RW
Di lettura-scrittura
...Selezione
Selezione fra due impostazioni
...Abilitazione
....disabilitazione
Esegue o attiva una funzione
Interrompe o disattiva una funzione
...indicatore
Il valore può essere unicamente letto
Limitazioni d'uso
S
Il nuovo valore del parametro viene salvato quando l'alimentazione in
C.A. viene scollegata dall'azionamento.
P
Parametro protetto. Il parametro non può essere impiegato come
parametro di destinazione per un ingresso programmabile.
Campo
Bi
Parametro variabile con un campo valori bipolare.
Uni
Parametro variabile con un campo valori unipolare.
Bit
Parametro bit.
Simboli
ð
ô
~
UD53 User Guide
Issue code: 53ni3
Valore di default
Campo valori
Indica un campo valori
(nel caso dei parametri bit, ~ indica or).
15
Velocità in
giri/min. del Posizione
del resolver
resolver
Ingressi SEN e COS
del resolver
16.02
Uscite dell'encoder
simulato
16.03
48
49
40
1
Decoder
2
50
41
16.08
[16.07]
51
43
Abilitazione
uscite F/D
dell'encoder
simulato
44
46
47
16.12
16.09
16.07
Offset di fase
del resolver
16.05
Prova di
fasatura
del resolver
Scalatura uscite
dell'encoder
simulato
Disabilitazione
sincronizzazione
uscite impulsi di
riferimento Z
dell'encoder
simulato
Logica di
controllo della
sincronizzazione
16.13
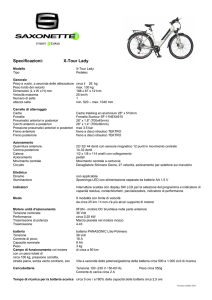
Figura 6
16
Diagramma della logica dell'UD53Descrizione
Indicatore inattivo di
sincronizzazione
uscite impulsi di
riferimento Z
dell'encoder simulato
dei parametri
UD53 User Guide
Issue code: 53ni3
16.01 Codice del modulo opzionale inserito
ô
0 ~ 100
ð
RO Uni
P
16.01 indica il tipo di modulo opzionale piccolo inserito nell'azionamento,
come descritto sotto:
0 Nessun modulo opzionale piccolo
1 Ingressi/uscite supplementari UD50
2 Interfaccia dell'encoder secondario UD51
3 Interfaccia del resolver UD53
4 Encoder SEN-COS UD52
16.02 Giri/min.
ô
±30 000
RESOLVER
ð
GIRI/MIN.
RO
Bi
P
16.02 indica la velocità di rotazione del resolver.
16.03 Posizione resolver
ô
0 ~ 16383
ð
giri/16384
RO Uni
P
16.03 indica la posizione assoluta dell'albero del motore (l'indicazione
prende in considerazione l'offset di fase immesso in 16.09 Offset di fase
resolver).
16.05 Prova di fasatura del resolver
ô
0~1
ð
0
RW
Bit
Impostare il parametro 16.05 su 1 per avviare la prova di fasatura del
resolver (una volta terminata, 16.05 viene azzerato automaticamente).
Vedere Offset di fase nel Capitolo 5 Impostazione dell'UD53.
UD53 User Guide
Issue code: 53ni3
17
16.06 Selezione uscita dell'encoder simulato
ô
ð
0~1
0
RW
Bit
Nota
Questo parametro è disponibile unicamente nelle versioni
seguenti:
Versione 2 e successive dell'UD53
Versione V03.xx.07 e successive del software del
convertitore
Impostare il parametro 16.06 come segue per selezionare la sorgente
richiesta per le uscite dell'encoder simulato:
16.06
Sorgente
0
Resolver
1
Encoder 1
Le uscite dell'encoder simulato si presentano sui terminali seguenti:
Terminale
Terminale
AB in
quadratura
Frequenza e
direzione
40
A
F
41
A\
F\
43
B
D
44
B\
D\
46
Z
Z
47
Z\
Z\
16.07 Scalatura uscite encoder simulato
ô
0 ~ 15
ð
n
0
2
RW Uni
Immettere il valore richiesto in 16.07 per la scalatura delle uscite
dell'encoder simulato. Il fattore di scala viene calcolato come segue:
1
2 [16. 07]
1
4
Ad esempio, per una divisione di /16 , impostare 16.07 su 4 (16 = 2 )
18
UD53 User Guide
Issue code: 53ni3
16.08 Abilitazione uscite F/D encoder simulato
ô
ð
0~1
0
RW
Bit
Impiegare 16.08 per selezionare il modo di uscita dei terminali 40, 41, 43, 44,
come indicato sotto:
16.08
Modo di uscita
0
Segnali AB in quadratura
1
Segnali di direzione e di frequenza
16.09 Offset di fase resolver
ô
0 ~ 6143
ð
1/6143 giri.
RW Uni
G
P
16.09 indica il valore dell'offset di fase. Vedere Offset di fase nel Capitolo 5
Impostazione dell'UD53 per i modi in cui è possibile immettere il valore.
Il valore viene salvato allo scollegamento dell'alimentazione di rete e può
essere modificato unicamente eseguendo una delle procedure indicate in
Offset di fase.
Quando si cambia il modo di funzionamento dell'azionamento, il parametro
16.09 viene azzerato.
Il ripristino dei valori di default non incide sul valore del parametro 16.09.
16.10 Selezione rapporto spire del resolver
ô
0~1
ð
0
RW Uni
Nota
Questo parametro è disponibile unicamente con le versioni
seguenti:
Versione 2 e successive dell'UD53
Versione V03.xx.07 e successive del software del
convertitore
Per la selezione del rapporto spire richiesto del resolver, impostare il
parametro 16.10 come segue:
16.10
UD53 User Guide
Issue code: 53ni3
Rapporto spire
0
3:1
1
2:1
19
16.12 Disabilitazione sincronizzazione uscite impulsi
di riferimento Z dell'encoder simulato
ô
ð
0~1
0
RW
Bit
Nota
Questo parametro è disponibile unicamente con le versioni
seguenti:
Versione 2 e successive dell'UD53
Versione V03.xx.07 e successive del software del
convertitore
Utilizzare il parametro 16.12 per controllare l'impostazione del 16.13
Indicatore inattivo di sincronizzazione uscite impulsi di riferimento Z dell'encoder
simulato.
16.13
ô
Indicatore inattivo di sincronizzazione uscite
impulsi di riferimento Z dell'encoder simulato
ð
0~1
RO
Bit
Nota
Questo parametro è disponibile unicamente con le versioni
seguenti:
Versione 2 e successive dell'UD53
Versione V03.xx.07 e successive del software del
convertitore
Il parametro 16.13 indica quanto segue:
16.13 impostato su 0
Gli impulsi di riferimento Z sono sincronizzati con il quadrante in cui le uscite
A e B in quadratura sono entrambe basse.
16.13 impostato su 1
Gli impulsi di riferimento Z possono essere presenti in uno qualsiasi dei
quattro quadranti, come descritto qui di seguito:
A e B entrambi bassi
A e B entrambi alti
A basso e B alto
A alto e B basso
Vedere il paragrafo Uscite degli impulsi di riferimento Z (terminali 46, 47) nel
Capitolo Impostazione dell'UD53.
20
UD53 User Guide
Issue code: 53ni3
A
Specifiche
A.1
Terminali
Ingressi del resolver
(terminali 48, 49, 50, 51)
Tensione massima (relativa a 0V)
applicata a SEN (basso) e COS (basso)
±4 V
Tensione massima (relativa a 0V)
applicata a SEN (alto) e COS (alto)
±12V
Protezione
Resistori in serie e circuito livellatore a
diodo
Uscite di eccitazione
(terminali 52, 53)
Frequenza di uscita
6 kHz
Tensione di uscita
6 V efficacioppure 4 V efficaci
(programmabile)
Tensioni massime assolute applicabili al
terminale 52 Uscita di eccitazione (alto)
-4V ~ + 24V (Può essere necessario una
protezione contro i cortocircuiti)
Corrente massima disponibile al
terminale 53
200mA
Protezione
Protezione contro le sovracorrenti e
microsfere di ferrite
Uscite dell'encoder simulato
(terminali 40, 41, 43, 44, 46, 47)
Tipo di uscita
EIA485
Frequenza massima di uscita
In quadratura: 205kHz
Frequenza e direzione: 410kHz
Tensione di uscita
Conforme a EIA485
Larghezza minima dell'impulso di
riferimento Z
300ns
Tensione massima assoluta applicabile a
ogni terminale
-10V ~ + 15V
Protezione
Limite di corrente con protezione termica
UD53 User Guide
Issue code: 53ni3
A-1
Stato dell'uscita
Tensione tipica di uscita
Carico di 5 mA
Carico di 25 mA
Basso
1.0V
1.5V
Alto
4.5V
4.0V
Comune 0V
(terminali 42, 45, 54, 55)
Corrente massima assoluta applicabile a ogni terminale
A.2
200mA
Temperatura e umidità
Campo temperatura ambiente: da 0°C a 50°C (da 32°F a 122°F).
Temperatura minima all'alimentazione: -10°C (14°F)
Umidità massima: 95% senza condensa a 40°C (104°F)
Campo temperatura di deposito: da -40°C a 50°C (da -40°F a 122°F)
A.3
Resolver
Il modulo UD53 funziona con resolver aventi le seguenti caratteristiche
tecniche:
Impedenza di ingresso: >85Ω a 6kHz
Rapporto spire (pri:sec): 3:1 o 2:1
Tensione di eccitazione: 6 V efficaci oppure 4 V efficaci
È possibile reperire resolver adeguati presso la Control Techniques Dynamics
aventi i seguenti valori identificativi:
Dimensione dei frame: 55RSS e 80RS
Codice avvolgimento: 1
A-2
UD53 User Guide
Issue code: 53ni3
B
Allineamento meccanico del resolver
Nota
Ricorrere alla presente procedura esclusivamente quando
non è possibile eseguire la procedura descritta nel
paragrafo Offset di fase nel Capitolo 5 Impostazione
dell'UD53.
Eseguire questa procedura per ottenere un allineamento di precisione del
resolver con il motore (per un offset di fase pari a zero). L'allineamento di
precisione può essere raggiunto unicamente quando il resolver è collegato
all'azionamento.
L'azionamento rileva i punti esatti di inversione della polarità delle uscite
sinusoidali, mentre non sarebbe possibile ottenere una tale accuratezza su
un oscilloscopio come nel caso degli encoder standard.
Durante tale procedura, l'albero del motore viene ruotato in
modo repentino in una nuova posizione. Prima di cominciare
la procedura, assicurarsi che esistano le condizioni di
sicurezza affinché l'albero del motore possa essere ruotato.
Avvertenza
Figura B-1
1
Scollegare il motore dall'azionamento.
2
Verificare che l'albero non sia sottoposto a carico e che possa ruotare
liberamente.
3
Applicare una corrente continua pari al 50% della corrente nominale del
motore agli avvolgimenti dello stesso, come mostrato nella Figura B-1
Collegamento di un motore a una sorgente C.C. per l'allineamento
meccanico dell'albero del resolver
UD53 User Guide
Issue code: 53ni3
B-1
L'albero del motore ruota fino a raggiungere una delle varie posizioni in
funzione del numero di coppie di poli. Ad esempio, l'albero di un motore a 6
poli si ferma in una delle tre posizioni.
La posizione del resolver viene indicata dal parametro 16.03 Posizione
resolver, il cui valore viene dato dalla formula seguente:
n
× 16384
[No. pole pairs]
Se il resolver è allineato correttamente, il valore di n è sempre un numero
intero (variabile da 0 a [numero delle coppie di poli - 1). Per un motore a 6
poli, tale valore sarebbe 0, 1 o 2 in funzione della posizione dell'albero. Il
valore del parametro 16.04 è quindi uno dei seguenti
0
5461
10923
[0 3 × 16384]
[13 × 16384]
[2 3 × 16384]
Se invece il resolver non è allineato con gli avvolgimenti del motore, il
parametro 16.03 indica altri valori (n non è un numero intero). Per
raggiungere l'allineamento del resolver, fare passare ancora corrente
continua negli avvolgimenti del motore e ruotare il resolver rispetto al
motore finché il parametro 16.03 non indica uno dei valori corretti.
Verificare che il valore del parametro 16.09 Offset di fase resolver sia zero.
B-2
UD53 User Guide
Issue code: 53ni3
C
Diagnostica
C.1
Codici di allarme
I codici di allarme riportati qui di seguito sono associati al modulo UD53:
Display
azionam.
SEP
N.
Condizioni
9
Guasto interno nell'UD53, oppure mancano i collegamenti all'UD53.
ENC.PH7
17
Collegamenti SEN e COS dal resolver non effettuati correttamente, oppure
collegamenti invertiti della sequenza di fase del motore.
ENC.PH8
18
Interruzione della prova di fasatura del resolver o della prova della corrente di
magnetizzazione.
ENC.PH9
181
Modo vettoriale in anello chiuso: perdita dei segnali di uscita del resolver.
Modo servoazionamento: collegamenti errati del resolver e/o della fase del motore,
con conseguente produzione di coppia inversa.
SEP.diS
180
Il tipo di modulo opzionale piccolo, insieme al quale il convertitore è stato
programmato per il funzionamento, è stato rimosso o non è stato inserito
correttamente.
Eseguire una delle istruzioni indicate sotto:
Accertarsi che sia stato installato il tipo appropriato di modulo opzionale piccolo
Per azionare il convertitore nella presente configurazione, impostare il parametro 00
su 1000 e premere il tasto ARRESTO/RESET.
UD53 User Guide
Issue code: 53ni3
C-1
C-2
UD53 User Guide
Issue code: 53ni3
D
Funzionamento di un resolver
Un resolver è un trasformatore rotante che produce tensioni di uscita in una
coppia di avvolgimenti secondari SEN e COS. Quando una tensione di
eccitazione viene applicata all'avvolgimento primario e l'albero del resolver
viene ruotato, forme d'onda ad ampiezza modulata della tensione si creano
negli avvolgimenti secondari, dove la tensione di eccitazione funge da
portante per la modulazione. Inoltre, su ogni secondario, la fase della
tensione portante viene invertita due volte per giro.
Nella Figura D-1 vengono mostrate sia la relazione esistente fra la posizione
del resolver e le uscite SEN e COS, sia le inversioni di fase nelle forme d'onda
portanti per la rotazione in avanti (per un'individuazione più chiara delle
inversioni di fase, vedere la Figura D-2). Nel diagramma viene inoltre
mostrata la forma d'onda della fase U del motore per un motore a sei poli in
condizioni di allineamento del motore e del resolver per un offset di fase pari
a zero.
Posizione del
resolver
Motore
Fase a U
Eccitazione
(primario)
SEN
Secondario
Portante in fase con eccitazione
Portante in controfase con eccitazione
COS
Secondario
Portante in fase
con eccitazione
o
90
Posizione zero
Figura D-1
Portante in
controfase con
eccitazione
Portante in controfase con eccitazione
o
180
o
270
Posizione zero
Modulazione sinusoidale e cosinusoidale negli avvolgimenti
secondari
UD53 User Guide
Issue code: 53ni3
D-1
Senso di rotazione
La rotazione in avanti viene definita come segue:
Motore
Sequenza di fase: U V W
Resolver
La modulazione cos è in anticipo su quella sin (di 90°) (vedere la Figura D-2)
Punto della posizione zero
Il resolver passa per la propria posizione zero quando si verifica quanto segue
(vedere la Figura 4):
USCITA sen
• Si ha la modulazione minima
• La forma d'onda portante cambia da in controfase con la tensione di
eccitazione nel primario a in fase con la tensione di eccitazione nel
primario
USCITA cos
• Si ha la modulazione massima
• La forma d'onda portante è in fase con la tensione di eccitazione nel
primario
Posizione del
resolver
Eccitazione
(primario)
SIN
secondario
Portante in controfase
con l'eccitazione
Portante in fase con l'eccitazione
Portante in fase con l'eccitazione
Portante in fase con l'eccitazione
COS
secondario
Posizione zero del resolver
Figura D-2
D-2
Condizioni di modulazione e di fase della portante attorno alla
posizione zero del resolver
UD53 User Guide
Issue code: 53ni3