Gruppo Costruzione di Macchine RE
La meccanica degli attuatori
a memoria di forma
Eugenio Dragoni
Giovanni Scirè
Andrea Spaggiari
Igor Spinella
Università di Modena e Reggio Emilia
Seminario Università degli Studi di Pavia
31 Gennaio 2014
Materiali meccatronici
Cambiano reversibilmente caratteristiche reologiche
Materiali leggeri (polimeri, adesivi)
Materiali meccatronici
Materiali meccatronici
Liquidi magnetoreologici
(forma, rigidezza, viscosità)
Polimeri elettroattivi
se sottoposti a stimolo fisico
(temperatura, campo elettrico/magnetico)
Ceramiche piezoelettriche
originato da corrente elettrica
Leghe a memoria di forma
Leghe a memoria di forma: attuatori
Principio di funzionamento
Principio di funzionamento
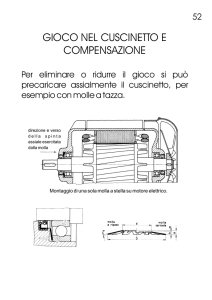
Sistemi di riarmo
Modelli di comportamento meccanico
Attuatori non convenzionali
500°, 30 min
Fatica termomeccanica
Linee di sviluppo
Principio di funzionamento
?
Principio di funzionamento
Principio di funzionamento
Principio di funzionamento
Sensore-attuatore
Acqua fredda
Memorizzazione della forma (una tantum)
Molla SMA
Acqua calda
Molla Riarmo
Fonte di riscaldamento (corrente elettrica, calore)
Sistema di riarmo (peso, molla, carico esterno…)
Cassetto
Acqua miscelata
Principio di funzionamento
Attuatore
Sistemi di riarmo
Forza costante (Peso, molla a nastro)
Molla elastica
Molla SMA
Compensazione negativa (meccanismi bistabili)
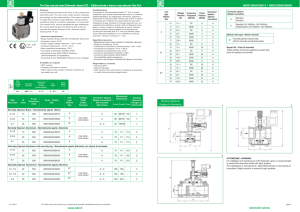
Sistemi di riarmo (forza costante)
Sistemi di riarmo (forza costante)
∆
Freddo
Freddo
Caldo
Sistemi di riarmo (forza costante)
Sistemi di riarmo (molla lineare)
Freddo
∆
Caldo
Sistemi di riarmo (molla lineare)
Sistemi di riarmo (molla SMA)
Freddo
Caldo
∆
Caldo
Sistemi di riarmo (molla SMA)
Freddo
Sistemi di riarmo (compensazione negativa)
Compensatore
SMA1
SMA2
Sistemi di riarmo (compensazione negativa)
SMA 1
SMA 2
Compensatore
Compensatore
SMA 1
SMA 2
Compensatore
Sistemi di riarmo (compensazione negativa)
SMA 1
Sistemi di riarmo (compensazione negativa)
SMA 2
Sistemi di riarmo (compensazione negativa)
Sistemi di riarmo (compensazione negativa)
Modelli di comportamento meccanico
Tensione / Forza
Corsa (mm)
Compensato
Tradizionale
Forza (N)
Modelli di comportamento meccanico
Deformazione / Spostamento
Modelli di comportamento meccanico
±F
Riarmo
SMA
Forza
Forza
utile
+F
Forza
utile
Forza
Spostamento
-F
Corsa
Spostamento
Modelli di comportamento meccanico
Modelli di comportamento meccanico
±F
±F
Riarmo
Riarmo
SMA
SMA
+F
Forza
Forza
-F
+F
-F
+F
+F
-F
-F
Corsa
Corsa
Corsa
Corsa
Spostamento
Spostamento
Modelli di comportamento meccanico
Attuatori non convenzionali
±F
Forza
SMA
Riarmo
Spostamento
Potenza specifica (W/kg)
Riarmo
Massa (kg)
Attuatori non convenzionali
Attuatori non convenzionali
Prestazioni attuatori SMA
Forza specifica
∆x
∆x
Corsa specifica
Attuatori non convenzionali
∆θ
∆x
Attuatori non convenzionali
Attuatori non convenzionali
Attuatori non convenzionali
Molla a nastro SMA
Attuatori non convenzionali
Attuatori non convenzionali
Lamine elastiche
Telaio
Cassetto
Molle SMA
Sinistra
Centro
Destra
Attuatori non convenzionali
Freddo
Filo SMA
Attuatori non convenzionali
Freddo
Caldo
Caldo
Doppio arco
Lamina
elastica
Forza
Multi-stadio
Corsa
Attuatori non convenzionali
Fatica termomeccanica
Gli elementi SMA degli attuatori sono soggetti a ciclo termico
Nascono tensioni e deformazioni variabili nel tempo
Esiste pericolo di rottura o degrado funzionale per fatica
termomeccanica
Fatica termomeccanica
Fatica termomeccanica
Tensione
Tensione costante e
deformazione limitata
Tensione
Tensione costante
Telaio
secondario
Cella di
carico
Ventola
Filo SMA
Deformazione
Deformazione
Peso
Deformazione costante
Sensore di
posizione
Tensione
Tensione
Tensione-deformazione
variabile
Alimentazione
Deformazione
Telaio
primario
Deformazione
Fatica termomeccanica
Fatica termomeccanica
Tensione costante
Tensione costante
250
Sopravv.
(5x105 cicli)
150
log(N)=5.53 - 9.919x10-3 · σ
100
=101.8 MPa
Limite diσwfatica
≈ 102 MPa
8
εeA
A
7
8
SME
σ =εeMM100 SME
MPa
5
3
3
σ = 100MPa
Numero
Cycles,di
N cicli
2×
×106
σ = 200Pa
2
Caldo
Caldo
1
0
1.0E+06
Differenziale
4
Differenziale
1
1.0E+05
Freddo
5
4
50
1.0E+04
SME
σ =εeMM200 SME
MPa
6
Freddo
2
0
1.0E+03
εeA
A
7
6
ε (%)
Tensione
applicata
Stress,
σ (MPa) (MPa)
200
Survived
Deformazione (%)
Failure
Rottura
0
0
125000
250000
375000
500000
0
Numero di cicli
1250
2500
3750
5000
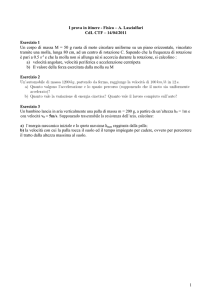
Fatica termomeccanica
Fatica termomeccanica
Deformazione costante
Deformazione costante
6
Rottura
Tensione a caldo (MPa)
Deformazione
(%)
Strain, εapplicata
(%)
Failure
5
4
3
log(N)=4.362 - 1.207x10-1 · ε%
2
1
0
1.0E+03
1.0E+04
1.0E+05
Numero
Cycles, Ndi cicli
Linee di sviluppo
Numero di cicli
Linee di sviluppo
Motore angolare continuo
Motori angolari continui
Ruota libera
Recupero energia a bassa entalpia
Molla
Filo SMA
Linee di sviluppo
Conclusioni
Recupero di energia a bassa entalpia
La meccanica degli attuatori a memoria di forma è facile
Esistono semplici criteri di progettazione
Le prestazioni dipendono dal sistema di riarmo
Le architetture non-convenzionali offrono vantaggi
Servono dati su fatica strutturale e funzionale
Promettente il recupero di energia a bassa entalpia
Bibliografia (1/2)
Domande?
σ
G. Scirè Mammano, E. Dragoni (In stampa) “Functional fatigue of Ni–Ti shape memory wires under various loading conditions”, Int. J.
Fatigue, (http://www.sciencedirect.com/science/article/pii/S0142112312000874).
Caldo
A
G. Scirè Mammano, E. Dragoni (In stampa) "Elastic compensation of linear shape memory alloy actuators using compliant
mechanisms", J. Intelligent Material Systems and Structures, (doi: 10.1177/1045389X13488253).
Austenite(T >Af)
Ea Martensite (T < Mf )
Freddo
C
σg
σom
O
B
Emb
Ema
εg
εadm ε
A. Spaggiari, E. Dragoni (In stampa) " Analytical and numerical modeling of shape memory alloy Negator springs for constant-force,
long-stroke actuators ", J. Intelligent Material Systems and Structures, (doi: 10.1177/1045389X13493354).
A. Spaggiari, I. Spinella, E. Dragoni (2013) “Design equations for binary shape memory actuators under arbitrary external forces”, J.
Intelligent Material Systems and Structures, 24(6), 682-694.
G. Scirè Mammano, E. Dragoni (2013) “Design and testing of an enhanced shape memory actuator elastically compensated by a
bistable rocker arm”, J. Intelligent Material Systems and Structures, 24(6), 704-716.
A. Spaggiari, G. Scirè Mammano, E. Dragoni (2012) " Optimum mechanical design of binary actuators based on shape memory alloys",
in Smart Actuation and Sensing Systems - Recent Advances and Future Chall., G. Berselli, R. Vertechy, G. Vassura (Eds). Intech, 3-34.
G. Scirè Mammano, E. Dragoni (2011) “Modelling of wire-on-drum shape memory actuators for linear and rotary motion”, J.
Intelligent Material Systems and Structures, 22(11), 1129-1140.
A. Spaggiari, E. Dragoni (2011) “Multiphysics Modeling and Design of Shape Memory Alloy Wave Springs as Linear Actuators”, ASME J
Mechanical Design, 133(6), 061008(1-8).
Bibliografia (2/2)
A. Spaggiari, I. Spinella, E. Dragoni (211) “Design of a Telescopic Linear Actuator Based on Hollow Shape Memory Springs”, J. of
Materials Engineering and Performance, 20(4-5), pp.489-486.
G. Scirè Mammano, E. Dragoni (2011) “Increasing stroke and output force of linear shape memory actuators by elastic
compensation”, Mechatronics, 21(3), 579-580.
I. Spinella, E. Dragoni, F. Stortiero (2010) “Modeling, Prototyping, and Testing of Helical Shape Memory Compression Springs With
Hollow Cross Section”, ASME J. Mech. Design, 132(6), 061008 (9 pp).
I. Spinella, E. Dragoni, (2010) “Analysis and design of hollow helical springs for shape memory actuators”, J. Intelligent Material
Systems and Structures, 21(1), 185-199.
I. Spinella, G. Scirè Mammano, E. Dragoni (2009) “Conceptual design and simulation of a compact shape memory actuator for rotary
motion”, J. of Materials Engineering and Performance, 18(5-6), 638-648.
A. Bellini, M. Colli, E. Dragoni, (2009) “Mechatronic Design of a shape memory alloy actuator for automotive tumble flaps: a case
study”, IEEE Transactions on Industrial Electronics, 56(7), 2644-2656.
I. Spinella, E. Dragoni, (2009) “Design equations for binary shape memory actuators under dissipative forces”, Proc. IMechE, Part C: J.
Mechanical Engineering Science, 223(C3), 531-543.