Azionamenti in Corrente Continua
Convertitori
La tensione variabile necessaria per regolare la velocità in un motore a c.c. può essere
ottenuta utilizzando, a seconda dei casi, due tipi di convertitori:
• raddrizzatori controllati (convertitori c.a. / c.c.) se si dispone di una
monofase o trifase alternata.
• chopper (convertitori c.c. / c.c.) se si dispone di una sorgente continua.
sorgente
Azionamenti in Corrente Continua
Va = Ra i a + pp
ppk eΦ e ω r
C = ppk eΦ e I a
Azionamenti in Corrente Continua
Raddrizzatore n-fase a singola semionda - Gruppo di commutazione
Azionamenti in Corrente Continua
Tiristori
Azionamenti in Corrente Continua
Azionamenti in Corrente Continua
Azionamenti in Corrente Continua
Azionamenti in Corrente Continua
Azionamenti in Corrente Continua
Azionamenti in Corrente Continua
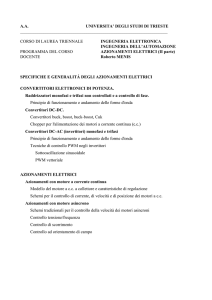
Chopper ad un quadrante
is S
La
ia
iD
Vs
D
va
Ra
vLa
Vao
Ea
Azionamenti in Corrente Continua
Modulazione PWM
Utilizzando un chopper, la tensione fornita al motore è di tipo impulsivo, con valor medio non nullo. Inoltre il
valor medio della tensione è controllabile essendo proporzionale al duty
y cycle
y
δ=Ton/Ts.
Azionamenti in Corrente Continua
Chopper a due quadranti tipo A (inversione della coppia)
is
S1
D2
ia
Vs
S2
La
Ra
vLa
D1 va
Vao
Ea
Il chopper tipo A consente l’inversione della corrente ia (e quindi della coppia Ce), ma non della
tensione va (e quindi della velocità).
Azionamenti in Corrente Continua
Gli interuttori commutano alternativamente.
Azionamenti in Corrente Continua
Il passaggio dal funzionamento da motore al funzionamento da generatore e viceversa avviene
agendo sul duty cycle.
Azionamenti in Corrente Continua
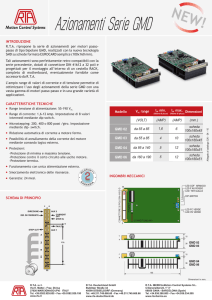
Chopper a due quadranti tipo B (inversione della velocità)
is
D2
S1
La
ia
Vs
vLa
D1
Ea
Ra
Vao
S2
va
Il chopper tipo A consente l’inversione della tensione va (e quindi della velocità), ma
non della corrente ia (ovvero della coppia Ce).
La strategia di pilotaggio consiste nel commutare contemporaneamente S1 ed S2.
δ > 0.5
funzionamento da motore
δ < 0.5
funzionamento da generatore
Azionamenti in Corrente Continua
Chopper a due quadranti tipo B
is
D2
S1
ia
Vs
La
Ea
Ra
Vao
D1
S2
va
is
D2
S1
ia
Vs
D1
La
Ea
Ra
Vao
va
S2
Azionamenti in Corrente Continua
In funzionamento da motore il duty cycle è tale che il valore medio della tensione di
alimentazione sia positivo.
va
Vs
toffff
ton
Vao
T
t
-V
Vs
ia
Iao
Iso
t
is
Azionamenti in Corrente Continua
In funzionamento da generatore il duty cycle è tale che il valore medio della tensione di
alimentazione sia negativo.
va
Vs
ton
-V
Vs
toff
t
Vao
T
ia
Iao
Iso
is
t
Azionamenti in Corrente Continua
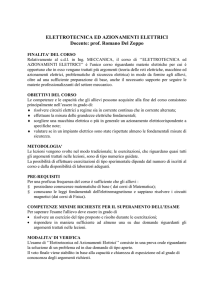
Al variare del duty cycle varia la tensione d’alimentazione del motore e si ottiene un fascio
rette parallele sul piano Ce -ω :
C e = k m I ao = k m
V (2δ − 1) − k m , Ω r
V s (2δ − 1) − E a
= km s
Ra
Ra
Ce
δ = 0.5
05
δ < 0.5
δ > 0.5
Ce= cost.
Ces
δ> >
Ω ro
Ωr
Azionamenti in Corrente Continua
Chopper a quattro quadranti
M t i chopper
Mentre
h
a due
d quadranti
d
ti consentono
t
di invertire
i
ti o la
l corrente
t o la
l tensione,
t
i
il chopper
h
a
quattro quadranti consente l’inversione sia della tensione va (e quindi della velocità), sia della
corrente ia (e quindi della coppia Ce).
Azionamenti in Corrente Continua
Modulazione bipolare
Azionamenti in Corrente Continua
Controllo sulla corrente di armatura
La corrente di armatura può essere regolata mediante un opportuno sistema di controllo che
adegua automaticamente la tensione d’armatura, in maniera da ottenere la corrente desiderata.
Un sistema simile può essere usato anche per regolare la corrente di eccitazione.
Azionamenti in Corrente Continua
L coppia
La
i motrice,
ti
mantenendo
t
d costanti
t ti Ia ed
d Ie rimane
i
costante
t t indipendentemente
i di
d t
t dal
d l valore
l
assunto dalla velocità. Le caratteristiche nel piano Ωr – Ce assumono la forma di rette parallele
all’asse della velocità. Ogni caratteristica termina nel punto in cui la tensione raggiunge il
valore nominale. Il luogo dei punti limite coincide con la caratteristica meccanica della
macchina a tensione nominale.
Azionamenti in Corrente Continua
Il controllo sulla corrente d’armatura permette di regolare la coppia della macchina. Per
ottenere il controllo della velocità è necessario realizzare un sistema di regolazione ad
anello chiuso.
Azionamenti in Corrente Continua
Regolazione della velocità ad anello chiuso con controllo di corrente
Azionamenti in Corrente Continua
Regolazione della velocità ad anello chiuso con controllo di corrente
Azionamenti in Corrente Continua
Controllo ad anello chiuso di posizione, velocità e corrente
Azionamenti DC Brushless
Motore DC Brushless
Motore CC
Un motore DC Brushless (sincrono a magneti permanenti con fem trapezoidale) può essere visto
come un motore in corrente continua in cui sia stato scambiato il rotore con lo statore.
Azionamenti DC Brushless
Ia
Ia
Motore in corrente continua
Motore DC Brushless
Azionamenti DC Brushless
Commutatore elettronico
La commutazione non avviene per mezzo del commutatore a lamelle ma per mezzo di interruttori
elettronici.
Le fasi vengono alimentate periodicamente a coppie.
Azionamenti DC Brushless
Flusso concatenato con una spira e tensione indotta
Azionamenti DC Brushless
Tensione indotta negli avvolgimenti di fase
La tensione indotta in un avvolgimento
g
di fase è costante quando tutte le spire sono affacciate sullo
stesso polo, è invece variabile linearmente quando alcune spire sono affacciate sul polo nord e altre
sul polo sud.
Azionamenti DC Brushless
Coppia elettromagnetica
Il valore istantaneo della coppia di un motore brushless a magneti
g
superficiali può essere espresso
come:
Azionamenti DC Brushless
Coppia elettromagnetica
C princ =
1
ωm
m
1
j =1
ωm
∑ e ji j =
[eaia + eb (− ia )] =
1
ωm
[(ea − eb ) ia ] = 2
1
ωm
(
)
EI = 2 2 N s B f lr
l I = kT I
Per generare una coppia costante è
necessario alimentare le fasi statoriche in
corrispondenza del tratto costante della forza
elettromotrice indotta trapezoidale
In ciascun intervallo di tempo pari a π/3 una
corrente deve essere nulla e due correnti
uguali ed opposte. Quindi ad ogni istante
vengono alimentate due fasi.
Ciò viene
ottenuto chiudendo in sequenza coppie di
interruttori, uno superiore ed uno inferiore,
appartenenti a fasi diverse.
Per sincronizzare l’alimentazione delle fasi
con il tratto costante delle FEM è necessario
usare un sensore di posizione.
In pratica si utilizza un sensore composto da
g
tre sonde ad effetto Hall che vengono
investite dal flusso dei magneti permanenti.
Azionamenti DC Brushless
Controllo di corrente ad isteresi