Ingegneria e Tecnologie
dei
Sistemi di Controllo
Sensori
per
Grandezze Meccaniche
Prof. Alberto Tonielli, Ing. Andrea Tilli
DEIS – Alma Mater Studiorum Università di Bologna
E-Mail: {atonielli,atilli}@deis.unibo.it
Revisionato: 17/11/2006
Sensori per grandezze meccaniche
Posizione
Potenziometro
Trasformatore Differenziale Lineare - LVDT
Î Resolver
Î Encoder
Î
Î
Velocità
Deformazione
Forza
Î
Î
Î
Dinamo tachimetrica
Estensimetro
Estensimetri su strutture meccaniche
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
2
Potenziometro
Sensore di posizione
Grandezza misurata (ingresso)
Grandezza di uscita
Tipo di sensore
Î
Î
Î
rotazione o spostamento lineare
tensione
modulante
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
3
1
Potenziometro
Caratteristiche essenziali
Sensore modulante
Risoluzione: > 0.1%
Linearità: >0.1%
Resistenza: 1K ÷ 100K Ω
Numero di giri: 1 ÷ 10
Tensione di riferimento
impedenza di uscita
Vref
Problemi di interfacciamento
Vout
Î
Î
Î
autoriscaldamento
interfacciamento
disturbi elettromagnetici
4
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Trasformatore Differenziale Lineare - LVDT
Sensore di posizione
Grandezza misurata (ingresso)
Grandezza di uscita
Tipo di sensore
Î
Î
Î
Î
spostamento
segnale analogico modulato
modulante (campo magnetico)
sensore (coppia di avvolgimenti)
5
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
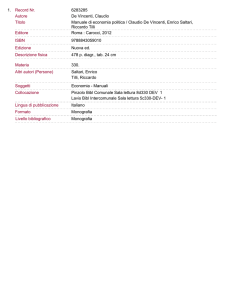
Trasformatore Differenziale Lineare - LVDT
X>0
X<0
S1
S2
V1
V2
Vout = (V2 -V1)
= Vm(X) sin (ωt+ ϕ)
Vin=Vm sin ωt
sensore modulante
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
ϕ = 0 se X>0
ϕ = π se X<0
6
2
Trasformatore Differenziale Lineare - LVDT
Vout = (V2 -V1) = Vm(X) sin (ωt+ ϕ)
ϕ = 0 se X>0
sensore modulante
Caratteristiche essenziali
ϕ = π se X<0
Risoluzione: 2 ÷ 20µm (lineare)
Sensibilità: 50 ÷ 100mVout/(mmVin)
Linearità: 0.1 ÷ 0.5 %
Campo di misura: 1 ÷ 10 cm
Frequenza di ecc.: 1 ÷ 50 KHz
Problemi di interfacciamento
demodulazione dell’uscita
stabilità del generatore di riferimento
7
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Resolver
Sensore di velocità/posizione
Grandezza misurata (ingresso)
Grandezza di uscita
Tipo di sensore
Î
Î
Î
Î
rotazione
segnale analogico modulato
modulante (campo magnetico)
sensore (coppia di avvolgimenti)
8
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Resolver
Principio di funzionamento
Generatore
flusso
concatenato
flusso
ϑ
Sensore
VG =
dΦ CG
dt
VS =
dΦ CS
dt
No corrente su sensore
e B pressoché costante su S:
Φ CG = SG BG (t)
Φ CS = SS BG (t)cos(ϑ(t))
In un Resolver reale il campo è
generato da due avvolgimenti e
vi sono due sensori
Se ϑ costante:
VS (t) = SS / SG VG (t) cos(ϑ)
NB: non può lavorare
con Vg continua….
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
9
3
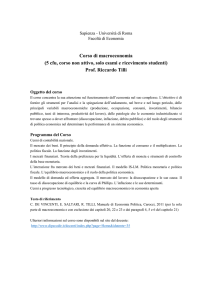
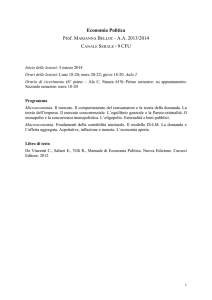
Resolver
Schema di massima di Resolver con 2 poli
Generatori di riferim.
V3=Vmsenωt
V4=Vmsenωt
V3
Generatori
V1
V4
V2
Rivelatori
Sensori
V1=V3cosϑ - V4senϑ
V2=V3senϑ + V4cosϑ
se
V3=0
V1=Vmsenϑsenωt
V2=Vmcosϑsenωt
10
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Resolver: caratteristiche generali
Segnale di uscita
Î
tensione alternata modulata in ampiezza dalla posizione
z occorre demodulare
z ricavare ϑ da sen ϑ e cos ϑ
Due segnali modulati in quadratura
Î
Î
possibilità di ricostruire la posizione su tutti i 360°
semplificazione dell’inversione delle funzioni trigonometriche
11
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Resolver: caratteristiche generali
Realizzazione schematica di un Resolver per
misura di posizione
Vs1
primario
rotante
Vr
secondari fissi
assi magnetici
in quadratura
3 avvolgimenti:
1 sola eccitazione
2 uscite
Vs2
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
12
4
Resolver: caratteristiche generali
Caratteristiche tecniche essenziali
linearità: 0.1 ÷ 0.5%
risoluzione: 0.1 ÷ 0.5°
Î sensibilità: 5 ÷ 10mV/° (Vref=20V)
Î Frequenza tensione di riferimento: 1 ÷ 20Khz
Î
Î
Per l’acquisizione e la conversione digitale
Realizzazioni con 2P poli
Î
Î
Î
convertitore speciale (RTD)
maggiore risoluzione
misura assoluta su 1/P di giro
13
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Resolver
Pregi
sensore assoluto nel giro (elettrico se realizzato con più coppie
polari)
Î costo contenuto rispetto ad altri sensori (Encoder)
Î idoneo al funzionamento in ambienti ostili
z all’interno di motori
Î
Difetti
richiede una tensione di riferimento sinusoidale
uscita funzione non lineare della posizione
Î spazzole sul rotore nelle versioni standard
Î
Î
Sensore di posizione/velocità standard negli azionamenti
per motori sincroni (Brushless)
14
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Resolver
Misura di posizione in movimento
Errori dinamici
Î
la rotazione genera tensioni di uscita spurie che possono
degradare la qualità della misura
Ipotesi
Î
Î
rotazione a velocità costante ⇒
rotore e statore puramente induttivi
Tensione di eccitazione
Flusso di eccitazione
ϑ( t ) = ϑ0 + αt
Vr = Vmsin( ωt )
K
ϕr = − Vm cos( ωt )
ω
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
15
5
Resolver - Errori Dinamici
flussi concatenati
di statore
K
Vm cos( ωt )cos( ϑ0 + αt )
ω
K
ϕcs2 = − Vm cos( ωt )sin( ϑ0 + αt )
ω
ϕcs1 = −
Tensione di eccitazione
Flusso di eccitazione
Vr = Vmsin( ωt )
K
ϕr = − Vm cos( ωt )
ω
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
16
Resolver - Errori Dinamici
flussi concatenati
di statore
K
Vm cos( ωt )cos( ϑ0 + αt )
ω
K
ϕcs2 = − Vm cos( ωt )sin( ϑ0 + αt )
ω
ϕcs1 = −
dϕcs1
= KVmsin(ωt )cos( ϑ0 + αt ) +
dt
α
+ Vm cos( ωt )sin(ϑ0 + αt )
errore dinamico
ω
dϕcs2
=
=
V
KV
s2
msin( ωt )sin( ϑ0 + αt ) +
tensione di statore
dt
α
− Vm cos( ωt )cos( ϑ0 + αt )
errore dinamico
ω
tensione di statore
Vs1 =
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
17
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici
frequenza di eccitazione maggiore per velocità di
rotazione elevate
demodulazione sensibile alla fase della portante
dϕcs1
= KVmsin(ωt )cos( ϑ0 + αt ) +
dt
α
+ Vm cos( ωt )sin(ϑ0 + αt )
errore dinamico
ω
dϕcs2
tensione di statore Vs2 = dt = KVmsin(ωt )sin(ϑ0 + αt ) +
α
− Vm cos( ωt )cos( ϑ0 + αt )
errore dinamico
ω
tensione di statore
Vs1 =
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
18
6
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici
frequenza di eccitazione maggiore per velocità di
rotazione elevate
demodulazione sensibile alla fase della portante
segnale utile
segnale spurio
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
19
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici
frequenza di eccitazione maggiore per velocità di
rotazione elevate
demodulazione sensibile alla fase della portante
Î
demodulazione del valore di cresta
segnale utile
segnale spurio
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
20
Resolver - Errori Dinamici
Per ridurre gli effetti degli errori dinamici
frequenza di eccitazione maggiore per velocità di
rotazione elevate
demodulazione sensibile alla fase della portante
Î
demodulazione a valor medio nel semiperiodo
segnale utile
segnale spurio
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
21
7
Convertitore da Resolver a digitale
Schema di principio
V4sen(ϑ−Φ)
V4cosϑ
x senΦ
V4senϑ
x cosΦ
+
φ
V4=Vmsenωt
U/D
counter
Demodulat.
sen(ϑ−Φ)
VCO
1 1+sT1
s 1+sT2
latch
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
22
Encoder
Sensore di velocità/posizione
Grandezza misurata (ingresso)
Grandezza di uscita
Tipo di sensore
Î
Î
Î
Î
rotazione o spostamento rettilineo
segnale logico o numero digitale
modulante = campo luminoso
sensore = effetto fotoelettrico
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
23
Encoder
Principio di funzionamento
Lampada
Interferente
Campo
Collimatore
Fotosensore
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
24
8
Encoder rotativo assoluto
Grandezza di uscita
valore digitale ad n bit
misura di posizione assoluta in un giro
Disco interferente
codificato
4 bit
4 bit
25
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Encoder rotativo assoluto
Pregi
uscita direttamente utilizzabile dalla unità di elaborazione
non necessita di azzeramento (sensore assoluto)
mantiene l’informazione di posizione anche in assenza di
alimentazione
Difetti
costo elevato
costo crescente con la risoluzione
sensore assoluto nel giro
Î
Î
il numero di bit utilizzati per la codifica (<12/14)
elettronica esterna se utilizzato su più giri
26
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Encoder rotativo incrementale
Grandezza di uscita
sequenza di impulsi
misura di rotazione incrementale
3
codificatore a 1 bit
+
zero
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
27
9
Encoder rotativo incrementale
Pregi
costo contenuto
incremento di costo limitato con la risoluzione
Î
standard fino 5000 impulsi/giro
Difetti
sensore incrementale
Î
elettronica esterna di conteggio e discriminazione del verso di
rotazione
necessita di azzeramento (sensore incrementale)
perde l’informazione di posizione in assenza di
alimentazione
Sensore di posiz./velocità standard industriale
28
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Riga ottica lineare
Sensore per spostamenti lineari realizzato come
l’Encoder incrementale ma con geometria lineare
Î
Î
barra rettilinea ⇔ disco
stesse caratteristiche
Caratteristiche standard
A
lunghezza
z anche maggiore di 1 metro
Î precisione
z dell’ordine di qualche µm
Î
B
0
fotoelementi
0
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
29
Encoder incrementali
Segnali di uscita
2 segnali in quadratura + 1 segnale di zero
A+B servono per discriminare il verso di rotazione
A
B
0
1/4P
passo P
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
30
10
Encoder incrementali
Discriminazione del verso di rotazione
rotazione oraria: A precede B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
31
Encoder incrementali
Discriminazione del verso di rotazione
rotazione oraria: A precede B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
32
Encoder incrementali
Discriminazione del verso di rotazione
rotazione oraria: A precede B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
33
11
Encoder incrementali
Discriminazione del verso di rotazione
rotazione oraria: A precede B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
34
Encoder incrementali
Discriminazione del verso di rotazione
rotazione oraria: A precede B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
35
Encoder incrementali
Discriminazione del verso di rotazione
sul fronte di salita di A il segnale B è sempre 0
A
A
B
0
passo P
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
36
12
Encoder incrementali
Discriminazione del verso di rotazione
rotazione antiorariaoraria: A segue B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
37
Encoder incrementali
Discriminazione del verso di rotazione
rotazione antioraria: A segue B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
38
Encoder incrementali
Discriminazione del verso di rotazione
rotazione antioraria: A segue B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
39
13
Encoder incrementali
Discriminazione del verso di rotazione
rotazione antioraria: A segue B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
40
Encoder incrementali
Discriminazione del verso di rotazione
rotazione antioraria: A segue B
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
41
Encoder incrementali
Discriminazione del verso di rotazione
sul fronte di salita di A il segnale B è sempre 1
A
A
B
0
B
0
fotoelementi
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
42
14
Encoder incrementali
Moltiplicazione degli impulsi
Attenzione: aumenta la
Risoluzione (x2 o x4)
non aumenta: altrettanto
la precisione
B (rimane fissa l’incertezza
sui fronti, che in genere
è, però, contenuta
x2 rispetto alla risoluzione)
A
x4
43
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Encoder incrementali
Circuiti per la moltiplicazione degli impulsi
x2
A
XOR
B
Mono
stabile
M1
OR
x2
NOT
x2
x2
Mono
stabile
M2
M1
circuito moltiplicatore per 4
M2
x4
44
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Encoder incrementali
Interfaccia di acquisizione
B
0
X2
o
X4
Clk
A
A
U/D
Funzioni svolte
discriminazione
verso
Î moltiplicazione
impulsi
Î accumulo
posizione assoluta
Î
O
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
45
15
Encoder incrementali
Problematiche di discriminazione del verso:
VIBRAZIONI
Esempio con solo conteggio su fronte salita A e
discriminazione verso in funzione di B
Î
Alla lavagna….. Deriva!
Soluzione generale:
Î
Î
Piuttosto complessa: segnali asincroni!
Linea guida: bisogna valutare verso su OGNI fronte di
commutazione di ogni fase
z alla luce di ciò: conviene anche sempre usare il X4…
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
46
Encoder incrementali
Elettronica di interfacciamento
Acquisizione con optoaccoppiatori
Î
Î
isolamento galvanico: immunità ai disturbi
costo aumenta
attenzione alle diverse tipologie d’uscita per gli encoder
porte npn/pnp
z tipicamente TTL compatibili
Î transistor npn/pnp open collector
z tensione d’uscita diversa dall’alimentazione encoder
Î coppia di transistor push-pull
z maggiore velocità (resistenza d’uscita)
Î line driver digitale
z trasmissione differenziale: immunità ai disturbi di modo
comune e aumento swing di segnale
Î
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
47
Encoder incrementali
Problemi dell'elettronica di interfacciamento
limitazioni di banda del trasmettitore a bordo encoder
Massima frequenza riproducibile dall’elettronica di trasmissione
La frequenza elettrica di uscita (impulsi al secondo) è
proporzionale a
z (numero di impulsi giro)*(numero di giri al secondo)
Î Corretta scelta!
Î
Î
Limitazioni della banda del ricevitore:
lunghe connessioni:
Î
Î
Corretto progetto!
Problemi di riflessione
z adattamento di impedenza
corrente per l’accensione degli optoaccoppiatori
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
48
16
Encoder incrementali e assoluti
MISURAZIONE DELLA VELOCITA’
Differenziazione
Rumore di quantizzazione legato alla risoluzione
Î
Î
Esempio alla lavagna…
Cresce al calare del tempo di campionamento!
Attenzione Molto critico per controllo di velocità a larga banda
Î
Filtraggio: attenzione rumore di quantizzazione può essere anche
in bassa frequenza
Soluzione adottata in genere: aumentare il più possibile la
risoluzione: encoder sin-cos (che hanno anche altre proprietà)
Î Altra soluzione per basse velocità: misurare il tempo tra gli
impulsi…
z Errore di quantizzazione del conteggio del tempo
Î
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
49
Encoder seno/coseno
Grandezza di uscita
Î
Î
valore digitale ad n bit + coppia di segnali analogici sin/cos
misura di posizione assoluta in un giro
il disco interferente è costituito in modo da ottenere
Î
Î
internamente un encoder assoluto a 10-12 bit
esternamente un encoder incrementale con profilo delle
maschere e dispositivi ottici lineari
z rilevano la quantità di luce
Out Grey
in codice Grey
23
22
Out analog1
Out analog2
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
50
Encoder seno/coseno
Utilizzo della parte incrementale sinusoidale
Se si squadra il segnale: come incrementale classico
Se si ricostruisce angolo delle sinusoide si ottiene
aumento della risoluzione
Î
Comparatore di zero
Operazione detta: interpolazione
Complessa: trattamento dei segnali analogici simile a resolver
dopo la demodulazione
z Attenzione angolo di segnali sin-cos: informazione assoluta
nel passo
Î Minore immunità ai disturbi per trasmissioni remote
Î
Î
Esistono righe ottiche sin-cos
Î
Non hanno generalmente la parte assoluta
z Necessario comunque azzeramento e conteggio
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
51
17
Encoder seno/coseno
Pregi
sensore assoluto nel giro
Î
10-12 bit di encoder assoluto + angolo (interno al passo)
ricostruito a 10-12 bit
elevatissima risoluzione
Î
Î
8 Milioni di impulsi giro, risoluzione migliore di 10-6 rad
Differenziazione: basso rumore di quantizzazione
Difetti
costo elevato
necessita di sofisticata elettronica di acquisizione
indispensabile negli azionamenti per motori
sincroni (Brushless) ad elevatissima dinamica
Î
macchine automatiche, robotica
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
52
Encoder seno/coseno
Elettronica di Interfacciamento
Informazione da parte assoluta:
Informazione da parte “sinusoidale”
Î
Î
Trasmissione digitale
Trasmissione line driver analogica
z Differenziale per aumentare immunità a disturbi di modo
comune e swing del segnale
Soluzioni con gestione della parte sinusoidale a bordo
encoder
Trasmissione puramente digitale: posizione assoluta a più di
20/22bit su giro
Î Tipicamente seriale
Î
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
53
Sensori per grandezze meccaniche
Posizione
Encoder
Resolver
Î LVDT
Î
Î
Velocità
Deformazione
Forza e Pressione
Î
Î
Î
Dinamo tachimetrica
Estensimetro
Estensimetri su strutture meccaniche
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
54
18
Dinamo tachimetrica
Sensore di velocità
Motore a collettore usato a rovescio
Grandezza misurata (ingresso)
Grandezza di uscita
Tipo di sensore
Î
Î
Î
Î
se fatto ruotare genera una tensione
velocità angolare
tensione
autoeccitante
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
55
Dinamo tachimetrica
Principio di funzionamento
N
S
ϑ
V=KdΦc
dt
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
56
Dinamo tachimetrica
Pregi
sensore assoluto
costo contenuto
idoneo al funzionamento in ambienti ostili
Î
all’interno di motori
Difetti
contatti striscianti
ripple strutturale sull’ uscita
misura solo la velocità
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
57
19
Dinamo tachimetrica
Caratteristiche tecniche essenziali
linearità: 0.5 ÷1%
sensibilità: 5 ÷ 10V/1000 rpm
ampiezza del ripple: 1 ÷ 2%
Sensore di velocità standard negli azionamenti per
motori a collettore (motori DC)
58
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Sensori per grandezze meccaniche
Posizione
Î
Î
Encoder
Resolver
Velocità
Deformazione
Forza e Pressione
Î
Î
Î
Dinamo tachimetrica
Estensimetro
Estensimetri su strutture meccaniche
59
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Estensimetro
Grandezza misurata
Grandezza in uscita
Tipo di sensore
Î
Î
Î
deformazione
resistenza
modulante
z piezoresisitivo
Per la misura
z
circuito per la trasformazione in una tensione
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
60
20
Estensimetro o Strain gage
Strain ⇒ ε = ∆L/L = deformazione relativa
Î
ε adimensionale
10mm
a film metallico
Ôpiù comune
0.5mm
a semiconduttore
Ôper applicazioni integrate
piezoresistenza
61
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
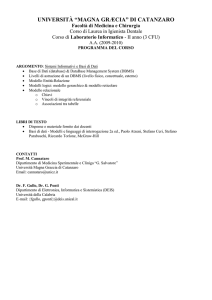
Estensimetro
Trasformazione della variazione di resistenza in
tensione
Î
1 estensimetro deformato
R
R
1
4
2
3
Vref
R+∆R
R
Vout
ponte intero di Wheatstone
R ⎞
⎛ R + ∆R
Vout = Vref ⎜
−
⎟
⎝ 2R + ∆R 2R ⎠
∆R
1 ∆R
R
= Vref
≅ Vref
4 R
⎛ ∆R ⎞
4⎜1 +
⎟
⎝ 2R ⎠
se
∆R
<< 1
R
62
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Estensimetro
Trasformazione della variazione di resistenza in
tensione
Î
4 estensimetri deformati… ATTENZIONE AL POSIZIONAMENTO!
R+∆R
1
4
R−∆R
Vref
2
3
R+∆R
R-∆R
⎛ R + ∆R R − ∆R ⎞
−
Vout = Vref ⎜
⎟
2R ⎠
⎝ 2R
∆R
= Vref
R
Vout
relazione lineare
ponte intero di Wheatstone
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
63
21
Estensimetro
Gage factor
fattore caratteristico di ogni estensimetro
∆R ∆R
V 1
GF = R = R = out
∆L
ε Vref ε
L
1
V
ε = out
= KVout
Vref GF
strain
se ho 4 estensimetri identici
deformati
misura raziometrica
64
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Estensimetro
Caratteristiche tecniche essenziali
parametro
film metallico
semiconduttore
≈ 2 ± 1%
GF
Rnom(
Ω)
120, 350
∆R/ ∆T(p.p.m /°C)
linearità
5÷50
≈ 100 ±3%
molti valori
100÷500
dipende dall’allestimento meccanico
E’ possibile adattare ∆R/ ∆T al tipo di materiale di
supporto per compensare le deformazioni
apparenti dovute agli effetti termici combinati
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
65
Sensori per grandezze meccaniche
Posizione
Î
Î
Encoder
Resolver
Velocità
Deformazione
Forza
Î
Î
Î
Dinamo tachimetrica
Estensimetro
Estensimetri su strutture meccaniche
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
66
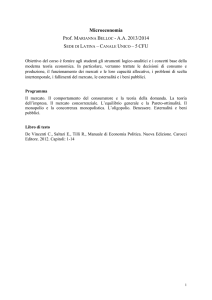
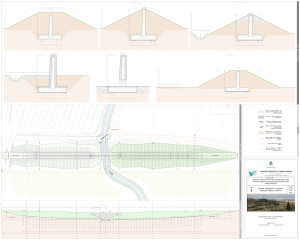
22
Forza
Estensimetri incollati su una struttura metallica
che si deforma con l’applicazione della forza
F
3
4
1
deformazione
assiale
2
1
F
deformazione
flessionale
3
2
4
67
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Forza
Caratteristiche tecniche essenziali sull’uscita del ponte
estensimetrico
sensitività: 2mV/V a 1000µε
uscita: 20µV/µε
Î nonlinearità: < 0.5%
Î
Î
I valori in forza e la linearità dipendono dal materiale di
supporto
68
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
Pressione
Sensore integrato a semiconduttore
silicio piezoresistivo
membrana
acciaio
∆P
Ref
Amp
circuiti elettronici
di
condizionamento
sul sensore
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
69
23
Pressione
Caratteristiche tecniche essenziali all’uscita del circuito
elettronico di compensazione
sensitività: <1%
off-set: <1%
Î nonlinearità: < 0.5%
Î derive termiche: <0.5%
Î errore totale: <1.5%
Î
Î
Prof. A. Tonielli, Ing. A. Tilli - DEIS - Università di Bologna
70
Ingegneria e Tecnologie
dei
Sistemi di Controllo
Sensori
per
Grandezze Meccaniche
Fine
Ing. Andrea Tilli
DEIS – Alma Mater Studiorum Università di Bologna
E-Mail: [email protected]
24