Capitolo VI
Conversione A/D e D/A
Capitolo VI
Conversione A/D e D/A.
6.1) Introduzione.
Nei moderni sistemi di misura e controllo le informazioni possono presentarsi in una di due
diverse forme. Nella prima la misura di una quantita' fisica (ad esempio una temperatura o una
velocita', etc.) si presenta su una singola linea sotto forma di una grandezza analogica (tensione,
corrente, frequenza, etc.), la cui ampiezza rappresenta la misura della grandezza fisica stessa. Nella
seconda invece la misura, e’ presentata (sia in forma seriale su un'unica linea, che in forma parallela
su piu' linee) con un numero finito di bit di informazione, che costituiscono una parola digitale cui e'
possibile associare il numero che rappresenta la misura della grandezza di interesse sulla base di
un'opportuna unita' di misura.
E' evidente che nel secondo caso la misura risulta discretizzata e la massima risoluzione che si
puo' ottenere e' determinata dal passo di quantizzazione, che coincide con il valore associato al bit
meno significativo della parola.
Ad esempio utilizzando una parola da tre bit in numerazione binaria posizionale e associando
al bit meno significativo ( o in altre parole adottando quale passo di quantizzazione) un volt, la
massima risoluzione sara' appunto di un volt e potranno venir misurate tensioni comprese tra 0 e 7
volt in passi incrementali di un volt. Aggiungendo un ulteriore bit prima del piu' significativo, che
in qualche modo rappresenti il segno, si potranno evidentemente rappresentare sia grandezze
positive che negative, come illustrato in fig. 6.1
E' immediato osservare che rispetto alla forma analogica (di tipo continuo) la
rappresentazione digitale (discreta) introduce un errore, detto errore di quantizzazione, la cui
ampiezza massima e' pari alla meta' del passo di quantizzazione e la cui distribuzione di probabilita'
puo' essere ritenuta uniforme. Questo errore puo' essere ridotto unicamente riducendo il passo di
quantizzazione o, in altre parole, aumentando il numero di bit della parola rappresentativa a parita'
di ampiezza della grandezza da misurare.
Valore analogico
+7
+6
+5
+4
+3
+2
+1
1111
1110 1101 1100
parola digitale
1011 1010 1001 1000
0000 0001 0010
0011 0100 0101 0110
0111
-1
-2
-3
-4
-5
-6
-7
fig. 6.1
Molti sono i motivi per cui una grandezza viene rappresentata in forma numerica. Uno di
questi e' senza dubbio l'enorme diffusione dei sistemi di eleborazione, che vanno dalla
209
Capitolo VI
Conversione A/D e D/A
strumentazione basata sui microprocessori ai mainframe di elevatissime prestazioni, disponibili
tuttavia con una certa facilita' ad una larghissima utenza. Tuttavia la motivazione piu' convincente,
che ha portato alla digitalizzazione anche in quei campi che fino a pochi anni or sono sembravano
dominio incontrastato della strumentazione analogica, risiede nel fatto che l'elaborazione
dell'informazione per via analogica degrada l'accuratezza del dato a ciascun passo di elaborazione e
che questa degradazione e' tanto piu' marcata quanto piu' elevata e' la velocita' di elaborazione
richiesta, prevalentemente per l'inevitabile presenza del rumore e per l'imprecisione dei dispositivi
adottati.
Con le tecniche digitali invece l'accuratezza del dato e' funzione unicamente del numero di bit
utilizzato per rappresentare l'informazione e, qualora si prendano le dovute precauzioni, non
degrada ad ogni passo dell'elaborazione.
E' ovvio che in un sistema, in cui convivano ambedue le forme di rappresentazione, devono
esistere dei dispositivi che permettano il passaggio dall'una all'altra forma in ambedue i versi.
Devono cioe' esistere quei dispositivi che vengono chiamati convertitore D/A e A/D.
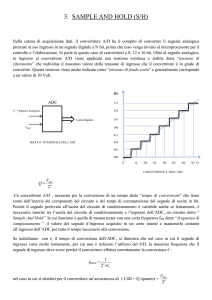
6.2) Il campionamento.
Come si e’ gia’ accennato i segnali continui, o analogici, possono venir descritti da una
funzione continua del tempo. Al contrario i segnali discreti (o digitali) sono rappresentabili con una
successione di numeri, che altro non sono se non la misura del corrispondente segnale analogico
secondo un’opportuna unita’ di misura. E’ evidente pertanto che un segnale discreto non potra’
essere definito per qualsiasi valore di t, ma la sua descrizione funzionale sara’ valida solo in
determinati istanti T1, T2, …., Tn nei quali rappresentera’ l’ampiezza del segnale analogico.
Da queste considerazioni discende immediatamente che per passare da una grandezza
analogica alla sua rappresentazione digitale la prima operazione da eseguire e’ quella di prelevare
negli istanti T1, T2, …., Tn tale grandezza, eseguendo quello che viene chiamato campionamento
del segnale.
Nell’eseguire il campionamento, tuttavia, vanno adottate opportune precauzioni per consentire
di ricostruire a posteriori il segnale. In altre parole la frequenza di campionamento non puo’ essere
qualsiasi, ma e’ legata alla massima frequenza contenuta nel segnale da campionare.
Si prenda in considerazione un segnale s(t) (figura 6.2 a) e si supponga che esso abbia una
banda limitata come illustrato in figura 6.2 (b).
(a)
(b)
s(t)
s(f)
t
-B
Tc
figura 6.2
210
B
f
Capitolo VI
Conversione A/D e D/A
Dalla teoria dei segnali si sa che il segnale campionato, ottenuto prelevando un campione ogni
Tc secondi, ha uno spettro che si ottiene da quello di s(t) multiplando tale spettro lungo l’asse delle
frequenze a distanza fc = 1/Tc, secondo quanto illustrato in figura 6.3.
s(f)
0
-f c
-2 f c
fc
2 fc
f
figura 6.3
Considerazioni anche intuitive permettono di affermare che per ricostruire il segnale s(t) i
singoli spettri non devono sovrapporsi in lacuna loro parte. In altre parole la frequenza di
campionamento fc deve soddisfare la condizione
fc ≥ 2B
In caso contrario si avrebbe il cosiddetto fenomeno dell’aliasing, con distorsioni anche
notevoli del segnale ricostruito.
Per assicurare che le condizioni espresse siano rispettate, all’ingresso dei sistemi di
conversione A/D viene di solito introdotto un filtro passa-basso, detto filtro antialiasing, che ha lo
scopo di limitare superiormente la massima frequenza del segnale analogico che deve’essere
campionato.
Il circuito di campionamento vero e proprio puo’ venir realizzato nella sua forma piu’
semplice con un interruttore e un condensatore, come illustrato in figura 6.4.
S
C
v s (t)
figura 6.4
211
vo
Capitolo VI
Conversione A/D e D/A
In questo circuito la tensione ai capi del condensatore, coincidente con la tensione di uscita,
segue il segnale vs(t) quando il tasto S e’ chiuso. Quando il tasto S viene aperto la tensione vo
diviene costante con un valore pari a quello di vs(t) all’istante di apertura e a tale valore rimane fino
alla successiva chiusura.
Un sistema di questo genere, tuttavia, non e’ esente da critiche. In primo luogo la carica del
condensatore C dipende dall’impedenza interna del generatore di segnale vs(t). In secondo luogo il
condensatore C mantiene l’informazione solo se il circuito a valle ha un’impedenza di ingresso
infinita.
Per ovviare almeno in parte a questi inconvenienti il circuito campionatore puo’ venir
realizzato, ad esempio, secondo lo schema di figura 6.5.
-
A
A
vs(t)
+
+
1
2
vo
C
tensione di controllo
del gate
figura 6.5
L’interruttore in tal caso e’ realizzato con un NMOS e quando un segnale positivo applicato al
gate lo porta in conduzione il condensatore si carica al valore istantaneo di vs(t). L’inseguitore di
tensione A1 ha una duplice funzione. Da un lato non carica il circuito da cui viene prelevato il
segnale in virtu’ della sua elevatissima impedenza di ingresso. Dall’altro permette al condensatore C
di caricarsi molto velocemente in quanto la costante di tempo relativa e’ Ro.C, dove con Ro si e’
indicata l’impedenza di uscita di A1, che, come si sa, e’ estremamente piccola. Il secondo
inseguitore A2 ha il compito di separare il condensatore C dal carico presente in uscita, permettendo
una ritenzione dell’informazione per tempi notevolmente elevati.
E’ bene che i condensatori utilizzati siano condensatori a policarbonato, polietilene,
polistirolo, mylar o teflon; abbiano cioe’ dielettrico con basse perdite. Tipi diversi di dielettrico
causerebbero infatti un rapido decadimento della tensione memorizzata con costanti di tempo
dell’ordine di alcuni secondi. Inoltre il fenomeno detto di assorbimento dielettrico, per effetto del
quale un condensatore “ricorda” una frazione della sua carica precedente quando c’e’ una variazione
della tensione ai suoi capi, introdurrebbe un errore nella grandezza memorizzata.
Quand’anche polarizzazione del dielettrico e assorbimento non avessero importanza, il tempo
di tenuta dell’informazione e’ limitato in quanto la corrente di perdita del MOS in condizioni di
interdizione (< 1 nA) e la corrente di polarizzazione di ingresso di A2 (< 1 nA) fluiscono in C.
Supponendo pertanto di utilizzare per C un condensatore da 0,5 µF, la tensione ai suoi capi
presentera’ una deriva dell’ordine dei 2 mV/sec.
E’ necessario poi tener conto che l’interruttore non si apre istantaneamente. C’e’ sempre un
tempo, detto tempo di apertura, dell’ordine di 100 nsec e definito come il tempo che intercorre tra
l’istante in cui viene applicato il comando sul gate e l’istante in cui il MOS effettivamente
commuta. A questo si aggiunge il tempo di acquisizione, cioe’ il tempo necessario affinche il
condensatore C si carichi dal vecchio al nuovo valore.
212
Capitolo VI
Conversione A/D e D/A
Se Ro e la resistenza rDS(on) del MOS fossero trascurabili, il tempo di acquisizione sarebbe
determinato dallo slew-rate di A1. Indicando con I la massima corrente che A1 puo’ fornire, la
variazione della tensione vc ai capi del condensatore sarebbe:
dv c I
=
dt
C
Tutti gli amplificatori operazionali hanno correnti massime d’uscita relativamente limitate
(dell’ordine di 25 mA) e quindi il tempo di acquisizione diviene non trascurabile.
Per ovviare a questo inconveniente si puo’ ricorrere a circuiti del tipo di quello illustrato in
figura 6.6.
+ Vcc
-
npn
A
A
vs(t)
+
+
1
pnp
porta di controllo
2
vo
C
- Vcc
figura 6.6
In questo circuito la tensione di uscita viene riportata all’ingresso invertente di A1. Cio’ fa si’
che durante l’intervallo di campionamento vs(t) = vo. Nell’intervallo di mantenimento vo rimane
invece al valore raggiunto da vs(t) alla fine dell’intervallo di campionamento, a meno della deriva
dovuta alla corrente di polarizzazione di A2 e alla corrente di perdita dell’insieme che funge da
interruttore.
Quanto maggiore e’ il valore di C e tanto minore e’ la deriva. Tuttavia un aumento di C fa
aumentare il tempo di acquisizione. Inoltre la presenza di un polo nel guadagno d’anello puo’
generare problemi di stabilita’ del sistema. C pertanto viene scelto come soluzione di compromesso
tra queste tre esigenze.
E’ opportuno rimarcare che il tempo di tenuta si rende necessario al fine di permettere al
convertitore A/D che si trova a valle di eseguire le sue operazioni avendo in ingresso una tensione
costante.
6.3) I convertitori D/A.
Prima di prendere in esame la struttura dei convertitori A/D e’ opportuno soffermarsi su quei
circuiti che effettuano l’operazione inversa, cioe’ sui convertitori D/A. Molto spesso infatti i
convertitori A/D si avvalgono di un convertitore D/A in un loop di reazione.
Un convertitore D/A e' essenzialmente un dispositivo che accetta come ingresso un segnale
digitale D e un riferimento analogico R e genera un'uscita analogica A legata all'ingresso dalla
relazione:
213
Capitolo VI
Conversione A/D e D/A
A = R.D
Il numero rappresentato da D si considera sempre minore dell'unita'. D cioe' e' essere
rappresentato nella forma:
D = a1 .2 −1 + a 2 .2 −2 + ...........+ a n .2 − n
(a i = 1,0)
Pertanto l'uscita del convertitore D/A e' data da:
(
A = R. a 1 .2 −1 + a 2 .2 −2 + ........... + a n .2 − n
)
(6.3.1)
Da un punto di vista elementare e puramente qualitativo un convertitore D/A potrebbe venir
visto come un potenziometro digitale in cui R e' la tensione applicata ai capi del potenziometro e
l'angolo di rotazione Θ del cursore (fig. 6.7) e' rappresentato dal numero D.
VR
R
D
D/A
V
A
0
Θ
fig. 6.7
In tutte le considerazioni finora svolte, tuttavia, non si e' affatto preso in considerazione il
segno del numero D, che e' stato implicitamente preso come positivo, al pari di R e di A. Cio' non e'
sempre vero. Ritornando all'analogia con il potenziometro e' evidente che per farlo operare con ambedue i segni, ottenendo nel contempo anche un'uscita bipolare, e' necessario prendere opportuni
provvedimenti. La fig. 6.8 illustra due possibili modi con cui si puo' ottenere quanto voluto.
In fig. 6.8 (a) il potenziometro e' connesso tra due tensioni di riferimento, + VR e - VR, e il
riferimento rispetto al quale si misurano le rotazioni e' posto a mezza corsa, in modo che quando Θ
= 0 le tensione di uscita V0 sia anch'essa nulla. Per rotazioni positive la tensione di uscita sara'
positiva, per rotazioni negative, negativa.
Con riferimento alla fig. 6.7 (b) il segnale Θ e' rappresentato in ampiezza e segno
separatamente. Un lato del potenziometro e' connesso a massa, l'altro e' commutato, in funzione del
segno di Θ, sui riferimenti +VR e - VR rispettivamente. L'uscita di tale circuito e' evidentemente la
stessa di quella del circuito di fig. 6.7 (a), ma per ottenere la stessa tensione di uscita la corsa del
cursore dev'essere doppia.
214
Capitolo VI
Conversione A/D e D/A
+VR
+VR
-VR
Θsegno
V0
V0
Θ polarizzato
Θ ampiezza
-VR
(a)
(b)
fig. 6.7
I convertitori D/A operano in modo del tutto simile; in altre parole e' la codifica del segnale
digitale che determina la configurazione del convertitore. Il progetto e la scelta del convertitore piu'
adatto ad un sistema non e' affatto semplice. Normalmente un convertitore non soddisfa tutte le
specifiche ed e' necessario ricorrere a soluzioni di compromesso. I principali fattori, comuni a tutti i
convertitori, da tener presenti per ottenere la migliori prestazioni in rapporto alla dimensione, al
peso e al costo sono:
1. Prestazioni.
Le prestazioni di un convertitore D/A devono sempre essere commisurate al costo, alle
dimensioni e al peso. Ad esempio il costo di un resistore aumenta esponenzialmente in funzione
della sua precisione. Da un altro punto di vista vi e' sempre un punto nella curva prestazioni-costo di
un convertitore, al di sopra del quale qualsiasi miglioramento delle prestazioni, anche piccolo,
comporta un costo irragionevolmente alto.
Questo punto nei convertitori D/A di normale impiego si puo' ritenere situato nell'intorno
della precisione dello 0.05% (pari a un numero binario di ingresso da 12 bit) su tutto il campo di
temperatura di esercizio.
2. Alimentazioni di riferimento.
Tutti i convertitori D/A a funzionamento bipolare richiedono delle tensioni di riferimento
positive e negative, che devono essere stabili e precise entro lo 0.01% del loro valore nominale, se il
convertitore deve essere preciso entro lo 0.05% del fondo scala. Tali alimentazioni di riferimento
devono avere una bassa impedenza d'uscita, bassa ondulazione residua e basso rumore. In diversi
casi inoltre esse devono avere la capacita' di fornire o assorbire rilevanti correnti.
3. Alimentazioni di potenza.
Nella maggior parte dei convertitori D/A le alimentazioni di potenza sono necessarie solo per
gli amplificatori (di norma operazionali) presenti. Pertanto il loro valore e' normalmente compreso
tra ± 12 V e ± 18V.
Le alimentazioni sono di regola uguali in ampiezza e stabili entro l'uno per cento, con bassa
ondulazione residua, rumore e impedenza d'uscita.
4. Buffers.
215
Capitolo VI
Conversione A/D e D/A
All'ingresso dei convertitori sono di solito presenti dei buffers digitali in quanto i segnali di
ingresso si possono ritenere validi solo in determinati istanti. Quando inoltre si operi con
convertitori D/A seriali o con tecniche multiplex anche sull'uscita dovranno venir inseriti dei buffers
analogici.
5. Amplificatori.
Nella realizzazione dei convertitori D/A viene di solito usato almeno un amplificatore
operazionale, che somma le varie componenti di corrente e le converte in una tensione di uscita a
bassa impedenza. Caratteristiche essenziali di un amplificatore operazionale sono gli offset di
tensione e corrente e la loro dipendenza dalla temperatura, il guadagno di tensione o di corrente, la
risposta di frequenza, la velocita' di salita della tensione di uscita (slew rate) e l'ampiezza massima
dell'uscita.
Nei convertitori D/A solamente l'offset rappresenta un reale problema, in particolare se il
convertitore deve avere una precisione dello 0.05% del fondo scala nel campo di temperatura a
norme MIL (-55° C / 125° C). Cio' implica che la tensione di uscita deve mantenersi stabile entro lo
0.01% del fondo scala o entro ± 1 mV del valore desiderato.
Nemmeno i piu' sofisticati amplificatori differenziali possono soddisfare queste caratteristiche
e si devono quindi impiegare delle tecniche di correzione dell'offset e della deriva.
Nel seguito si supporra' che tutti i convertitori che verranno presi in considerazione
corrispondano alle seguenti caratteristiche, quando non verra' altrimenti specificato.
• I segnali analogici di uscita saranno limitati a tensioni continue comprese, se possibile, tra +
10 e - 10 volt. I convertitori con uscita in alternata verranno trattati a parte.
• I segnali digitali sanno numeri in forma seriale o parallela, codificati in complemento a 2 o
binario offset, come verra' illustrato in un successivo paragrafo.
• Per convenzione si fara' riferimento alla logica positiva. Pertanto nelle realizzazioni con
transistori bipolari o CMOS uno zero logico sara' rappresentato da una tensione nulla, un uno logico
da una tensione positiva, mentre nelle realizzazione PMOS uno zero logico sara' rappresentato da
una tensione negativa, un uno logico da una tensione nulla.
• Il campo di temperatura su cui il convertitore dovra' mantenere le sue caratteristiche sara'
quello a norme MIL (-55° C / 125° C).
• Gli amplificatori operazionali eventualmente presenti saranno corretti rispetto all'offset e alla
deriva entro il ± 0.01% del loro fondo scala. Si assumera' inoltre che tutti gli altri parametri
essenziali dell'amplificatore siano tali da non introdurre errori significativi.
6.3.1) Codici di ingresso.
Prima di passare all'esame, sia pure sommario, di alcuni aspetti relativi alla conversione D/A
e' opportuno dare un cenno sui piu' comuni codici utilizzati. E' abbastanza evidente, da quanto gia'
visto, che usando la rappresentazione binaria posizionale si possono manipolare solo grandezze
unipolari. Per rappresentare grandezze sia positive che negative e' necessario ricorrere a codici
bipolari, in cui a uno dei bit sia attribuito il significato di segno.
I codici piu' diffusi sono:
• Complemento a 2
• Binario offset
• Complemento a 1
• Segno e ampiezza
216
Capitolo VI
Conversione A/D e D/A
anche se non sono infrequenti altri codici, quali ad esempio il decimale codificato in binario (BCD)
o il codice di Gray. In fig. 6.8 sono riportati i diversi codici citati con riferimento a un fondo scala
pari a 7.
CODICI
Numero
riferimento
positivo
riferimento
negativo
Segno
e ampiezza
Comp. a 2
Comp. a 1
7/8
6/8
-7/8
-6/8
0111
0110
0111
0110
0111
0110
1111
1110
5/8
4/8
-5/8
-4/8
0101
0100
0101
0100
0101
0100
1101
1100
3/8
2/8
-3/8
-2/8
0011
0010
0011
0010
0011
0010
1011
1010
1/8
0+
-1/8
0-
0001
0000
0001
0000
0001
0000
1001
0000
-1
0-1/8
0+
1/8
1000
1001
(0000)
1111
(1111)
1110
(1000)
0111
-2
-3
-2/8
-3/8
2/8
3/8
1010
1011
1110
1101
1101
1100
0110
0101
-4
-5
-4/8
-5/8
4/8
5/8
1100
1101
1100
1011
1011
1010
0100
0011
-6
-6/8
6/8
1110
1010
1001
0010
-7
-8
-7/8
-8/8
7/8
8/8
1111
------
1001
1000
1000
------
0001
(0000)
7
6
5
4
3
2
1
0
0
Binario offset
fig. 6.8
6.3.2) Codice complemento a 2.
Si supponga di voler rappresentare un numero N con n bit. Il massimo numero rappresentabile
in numerazione binaria posizionale e' ovviamente il valore 2 n − 1.
Nel codice complemento a 2 si limitano i numeri positivi rappresentabili al valore 2n -1 - 1,
che puo' venir rappresentato con n-1 bit, in modo che il piu' grande numero positivo rappresentato
contenga sempre uno 0 al rango piu' significativo e degli 1 o degli 0 in tutte le altre posizioni.
Rappresentando allora i numeri negativi con il complemento a 2n, cioe' rappresentando il
numero -N (N>0) con la quantita' 2n -N e ricordando che N < 2n-1 si deduce che la
rappresentazione complementata di -N sara' un valore maggiore di 2n-1 e minore di 2n. Cio'
significa che nella stringa di n bit, rappresentativa del numero negativo considerato, la posizione
piu' significativa, detta bit di segno, sara' sempre riempita da un 1.
Uno dei vantaggi della rappresentazione complemento a 2 risiede nel fatto che tale
complemento si ottiene con notevole facilita'. Dato il valore assoluto del numero (0 < N ≤ 2n -1 - 1)
il complemento a 2 si ottiene semplicemente per negazione di ciascun bit della stringa, sommando
poi un'unita' al risultato ottenuto. Analoga operazione va compiuta quando da un valore negativo si
vuol passare al suo valore assoluto.
Va notato a questo proposito che al campo dei numeri negativi rappresentabili appartiene
anche quello formato da un 1 nel rango piu' significativo, seguito da tutti 0, pari al valore - 2n -1 ,
ma che, con le convenzioni assunte, il suo valor assoluto non e' rappresentabile su n bit.
La diffusione di tale codice e' dovuta al fatto che l'uscita di molti circuiti di controllo e di
calcolo e' in tale forma. La rappresentazione complemento a 2 ha infatti come ulteriore vantaggio il
fatto che la differenza N1 - N2 si ottiene semplicemente sommando a N1 la rappresentazione
complementata di - N2. Si ha infatti:
(
)
N1 + 2 n − N 2 = 2 n + ( N1 − N 2 )
Se
(N
1
− N 2 ) ≥ 0 allora il risultato dell'operazione e' maggiore o uguale a 2n e per
rappresentare tale valore sarebbe necessaria una stringa di n + 1 bit. Pertanto il bit rappresentativo
217
Capitolo VI
Conversione A/D e D/A
del rango 2n va perso e nella stringa dei rimanenti n bit rimane pertanto rappresentata proprio la
stringa N1 − N 2 . Se viceversa N1 − N 2 < 0 allora si puo' scrivere che:
2 n + ( N 1 − N 2 ) = 2 n − ( N 2 − N1 )
e ricordando che N1 − N 2 < 2 n −1 − 1 nella stringa di n bit si ha proprio la rappresentazione
complementata del risultato.
Infine con questo codice la rappresentazione dello zero non e' ambigua. Applicando le
operazioni di complementazione descritte ad una stringa formata da tutti zero si ottiene ancora una
stringa formata da tutti zero.
E' evidente che se la parola di comando X del convertitore e' nella forma complemento a 2, il
bit piu' significativo dovra' connettere il relativo ingresso ad un generatore di riferimento di segno
opposto a quello degli altri bit.
Uno svantaggio che tuttavia il codice complemento a 2 presenta risiede nel fatto che passando
dal valore 0 (00......0) a quello -1 (11......1) tutti i bit della parola commutano. Con riferimento alla
realizzazione circuitale dei convertitori paralleli, cio' puo' causare sia dei picchi di assorbimento
dalle alimentazioni, siano esse di riferimento che di potenza, sia dei tempi di transitorio rilevanti a
causa delle differenti velocita' con cui i vari bit commutano.
6.3.3) Codice binario offset.
Il codice binario offset e' molto simile alla rappresentazione complemento a 2 ed e' il codice di
ingresso piu' conveniente per un convertitore D/A parallelo. L’unica differenza riscontrabile rispetto
al codice complemento a 2 risiede nel fatto che il bit di segno risulta negato.
Da un altro punto di vista si potrebbe dire che l'offset binario e' una numerazione binaria
posizionale il cui 0 coincide con il fondo scala negativo della grandezza rappresentata.
Questo codice risulta particolarmente conveniente quando il convertitore debba venir
utilizzato sia per grandezze unipolari che bipolari. Si passa infatti dall'uno all'altro tipo di
funzionamento con semplici operazioni di spostamento dell'offset.
Con riferimento alla fig. 6.9, che riporta una possibile realizzazione circuitale di principio di
un convertitore D/A, risulta evidente che per lavorare in modalita' bipolare il convertitore deve venir
polarizzato. Cio' puo' essere fatto semplicemente connettendo un resistore di polarizzazione Rb tra
una sorgente di riferimento -VR e la giunzione somma dell'amplificatore operazionale che provvede
a sommare le varie componenti di corrente e a convertirle in una tensione di uscita. Il resistore di
polarizzazione viene aggiustato in modo che la corrente che lo attraversa sia in valor assoluto pari
alla corrente del rango piu' significativo. In tal caso in presenza di un ingresso binario rappresentante lo zero (10......0) le correnti di polarizzazione e di ingresso hanno somma nulla, dando
percio' luogo ad una tensione d'uscita nulla.
Per ottenere la modalita' di funzionamento unipolare e' sufficiente non polarizzare il
convertitore. E' ovvio che per avere lo stesso fondo scala sia in modalita' unipolare che bipolare e'
necessario nel primo caso raddoppiare la resistenza di reazione dell'amplificatore operazionale; in
tal caso tuttavia raddoppia anche il passo di quantizzazione.
218
Capitolo VI
Conversione A/D e D/A
+VR
20 k
-I/2
a1
20 k
-VR
Ingresso digitale
parallelo
I/2
a2
20 k
40 k
I/4
80 k
a3
Vo
I/8
a 12
40.96 M
I/2 12
fig. 6.9
Uno svantaggio del codice binario offset e' che nel caso di ingresso nullo si puo' avere
un'uscita non nulla se la corrente del rango piu' significativo non e' perfettamente bilanciata dalla
corrente di polarizzazione. Inoltre anche con tale codice il passaggio dal valore zero (10......0) a
quello -1 (01......1) porta ad una massiccia commutazione con tutti gli inconvenienti gia' descritti nel
caso del codice complemento a 2.
6.3.4) Codice segno e ampiezza.
Come lo stesso nome lascia intuire, in questo codice la parola e' divisa in due parti, segno e
ampiezza. In altre parole la codifica per i numeri negativi e' la stessa che per i numeri positivi
eccetto che per il bit di segno.
L'utilizzo di questo codice risulta conveniente quando si abbia a che fare con grandezze che
oscillano nell'intorno dello zero, in quanto nel passaggio da valori positivi a negativi e viceversa si
ha la commutazione di uno o al piu' di qualche bit.
E' tuttavia opportuno notare che questa rappresentazione si rivela poco adatta all'elaborazione
numerica con sistemi di calcolo, che di solito adottano un'aritmetica complemento a 2. Esiste inoltre
un'ambiguita' nella rappresentazione dello zero (00.....0 o 10.....0).
6.3.5) Codice complemento a 1.
Il codice complemento a 1 e' molto simile a quello complemento a 2, ma in questo caso il
complemento viene realizzato rispetto al valore 2n - 1 anziche' rispetto 2n. Esso presenta il
vantaggio che un numero negativo si ottiene semplicemente negando i singoli bit del corrispondente
positivo. Le operazioni aritmetiche sono tuttavia piu' difficoltose ed esistono due possibili
rappresentazioni per lo zero (00......0 e 11......1).
219
Capitolo VI
Conversione A/D e D/A
TABELLA 6.1
Conversione tra codici
da
a
Segno e ampiezza
Complemento a 2
Segno e ampiezza
Complemento a 2
Binario offset
Complemento a 1
nessuna operazione
Se il bit piu' significativo vale 1 complementare gli altri bit
Complementare il
bit piu' significativo e se il nuovo va-
Se il bit piu' significativo vale 1 complementare gli altri bit
e sommare 1
lore e' 1 sommare 1
Se il bit piu' significativo vale 1 complementare gli altri bit
e sommare 1
nessuna operazione
Complementare il
bit piu' significati-
Se il bit piu' significativo vale 1 somma-
vo
re 1
Complementare il
Binario offset
Complemento a 1
bit piu' significativo e se il nuovo valore e' 0 complementare gli altri
bit e sommare 1
Se il bit piu' significativo vale 1 complementare gli altri bit
Complementare il
bit piu' significativo
Se il bit piu' significativo vale 1 sommare 11......1
nessuna operazione
Complementare il
bit piu' significativo e se il nuovo valore e' 0 sommare 1
Complementare il
bit piu' significativo e se il nuovo valore e' 1 sommare
11.....1
nessuna operazione
Questa sommaria disamina non esaurisce ovviamente tutti i possibili codici.
Esistono codici modificati, autocomplementanti, di Gray, etc, i cui vantaggi generalmente
risiedono nelle semplificazioni che permettono di apportare alle reti di commutazione dei
convertitori o nella maggior velocita' di conversione conseguibile.
In tabella 6.1 sono riassunte le operazioni che permettono di passare dall'uno all'altro dei
codici descritti.
6.4) I convertitori D/A paralleli.
Si definisce convertitore D/A parallelo quello che accetta come ingresso un segnale binario Xp
in forma parallela e utilizza tanti interruttori analogici quanti sono i bit di Xp. Ciascuna linea di
ingresso di Xp aziona un interruttore che collega una tensione di riferimento VR o la massa ad
un'opportuna rete resistiva, come illustrato in fig. 6.10.
La rete resistiva normalmente converte la tensione presente su ciascuna linea di ingresso in
una corrente di opportuna ampiezza, che viene sommata con le altre correnti, generate dagli altri
interruttori e resistori. La corrente totale viene poi convertita in tensione, ad esempio facendo
ricorso a un amplificatore operazionale.
E' ovvio che se il convertitore fosse di tipo bipolare sono necessarie due tensioni di
riferimento, l'una positiva e l'altra negativa.
I convertitori paralleli sono i piu' veloci in quanto sono in grado di fornire la tensione di uscita
non appena il segnale digitale di ingresso viene applicato. La velocita' di risposta e' limitata
unicamente dalla velocita' degli interruttori analogici, dalle reattanze parassite associate ai resistori
della rete e dalla velocita' di salita degli amplificatori eventualmente presenti.
220
Capitolo VI
Conversione A/D e D/A
a
1
VR
Ingresso
digitale
parallelo
a
I/2
2
I/4
a3
Vo
I/8
a 12
I/2 12
fig. 6.10
Per contro i convertitori paralleli richiedono che il segnale di ingresso sia presente in maniera
continuativa. Poiche' molti circuiti digitali di controllo forniscono l'uscita solo a certi specifici
intervalli di tempo, spesso e' necessario prevedere dei circuiti in grado di memorizzare il segnale
digitale tra la presentazione di un dato e l'altro.
Ingresso parallelo
Comando di
caricamento
FF 1
FF 2
FF 3
FF n
Uscita parallela
(a)
Comando di
scorrimento
Ingresso
seriale
FF 1
FF 2
FF 3
FF n
Uscita parallela
(b)
Comando di
scorrimento
Ingresso
seriale
Comando di
caricamento
FF 1
FF 2
FF 3
FF n
FF 1
FF 2
FF 3
FF n
Uscita parallela
(c)
fig. 6.11
Per segnali che pervengono al circuito in forma parallela la memoria consiste in un flip-flop
per ciascun bit (fig. 6.11 (a)) della parola binaria di ingresso. Normalmente non e' prevista alcuna
tecnica di interlacciamento per il caricamento dei dati, poiche' tale operazione e' pressocche'
istantanea e richiede tempi che di solito sono trascurabili rispetto al tempo di conversione.
Per segnali di ingresso che pervenissero invece in forma seriale, viene invece previsto un
insieme di n flip-flop connessi a formare un registro a scorrimento (fig. 6.11 (b)) e vi deve
evidentemente essere un clock sincronizzato con i bit della parola seriale. E' essenziale che sia il
numero degli impulsi di avanzamento che la loro temporizzazione siano esatti.
221
Capitolo VI
Conversione A/D e D/A
La parola binaria di uscita in forma parallela e' disponibile dopo che il processo di
memorizzazione e' stato completato; e' evidente che durante le operazioni di conversione da seriale
a parallelo l'uscita del convertitore D/A fornira' delle tensioni errate.
Se l'uscita analogica viene usata come ingresso di sistemi a lunga costante di tempo, tale
errore, generalmente di breve durata, e' di solito tollerato. In caso contrario l'uscita del registro a
scorrimento viene accumulata in un buffer parallelo (fig. 6.11 (c)) in modo da evitare tale errore. Il
comando di caricamento del buffer parallelo viene dato non appena l'operazione di memorizzazione
nel registro a scorrimento e' terminata.
6.4.1) Convertitore D/A a resistenze pesate.
Il piu' semplice e diretto metodo di conversione e' quello a resistenze pesate che fa uso di un
resistore per bit, secondo lo schema di fig. 6.12 (a).
Le resistenze hanno ciascuna un valore inversamente proporzionale al peso del bit cui
risultano collegate.
+VR
-VR
M.S.B.
R
2R
L.S.B.
+VR
V0A
-VR
V0A
R
M.S.B.
RL
RL
2R
4R
L.S.B.
4R
4R
resistore di
terminazione
(b)
(a)
fig. 6.12
La resistenza di uscita R0 della rete, supponendo che i generatori di riferimento approssimino
sufficientemente dei generatori di tensione, e' evidentemente:
1
1
1
1
7
= +
+
= R
R0 R 2R 4 R 4
cioe'
R0 =
Generalizzando al caso di n bit si ottiene:
4
R
7
1
1
1
1
2n − 1
= +
+ ...... + n −1 = n −1 R
R0 R 2R
2 R
2
222
Capitolo VI
Conversione A/D e D/A
R0 =
2 n −1
.R
2n − 1
e quindi all'aumentare di n R0 tende al valore R/2.
La tensione di uscita e' ovviamente funzione della parola binaria di ingresso. E' facile vedere
che con l'i-esimo bit posto a 1 e tutti gli altri a 0 la tensione di uscita, con resistenza di carico
infinita, vale :
V0 =
1
2
.
i −1
2 n −1
. VR
2n − 1
e quindi per sovrapposizione degli effetti
n −1
1
1
1
2
V0 = b1 + .b 2 + .b 3 + ...... + n −1 .b n . n
.VR
2
4
2
2 −1
Qualora non si possa trascurare l'effetto del resistore di carico RL la tensione di uscita sara':
V0' = V0 .
RL
R L + R0
Spesso la rete viene modificata con l'aggiunta di un resistore di valore pari a quello del bit
meno significativo, come illustrato in fig. 6.12 (b). In tal caso l'impedenza d'uscita e' sempre pari a
R/2, indipendentemente dal numero di bit della parola digitale. Anche l'espressione della tensione
di uscita ne risulta semplificata. Si ha che:
1
1
1
1
V0 = .b1 + .b 2 + .b 3 + ...... + n .b n .VR
4
8
2
2
Un vantaggio della rete a resistori pesati risiede nel fatto che la corrente che il generatore di
riferimento deve fornire diminuisce con il diminuire della significativita' del relativo bit. D'altra
parte all'aumentare del numero di bit della parola digitale il valore dei relativi resistori cresce
esponenzialmente e resistori molto precisi di elevato valore sono difficili sia da realizzare che molto
costosi, anche quando non si volesse tener conto delle costanti di tempo introdotte dalle capacita'
parassite, che limitano la velocita' operativa, e delle conduttanze parassite fonte di errore.
Non e' ovviamente pensabile di superare questi inconvenienti riducendo oltre un certo limite
la resistenza relativa la bit piu' significativo.
Pertanto la realizzazione a resistori pesati non viene in pratica utilizzata quando la parola
digitale ha un numero di bit superiore a otto.
La precisione dei convertitori a resistenze pesate e' migliore dello 0.1% del fondo scala se si
assume che la tensione di riferimento abbia una tolleranza massima dello 0.01%, che la tolleranza
dei resistori sia inferiore allo 0.05% e che l'errore introdotto dagli interruttori sia limitato allo
0.05%. La velocita' di conversione e' limitata, come gia' osservato, dai tempi di commutazione degli
interruttori e dalle reattanze parassite.
Gli interruttori usati sono di solito serie-parallelo, come quello illustrato in fig. 6.13. I due
gate sono pilotati in controfase in modo che ci sia sempre uno dei due MOS in conduzione e che
223
Capitolo VI
Conversione A/D e D/A
l’impedenza vista dall’ingresso della rete di conversione sia approssimativamente costante sia nello
stato ON che in quello OFF dell’interruttore.
VR
C
C
figura 6.13
6.4.2) Convertitore D/A con rete resistiva a scala.
I convertitori D/A con rete resistiva a scala (resistor ladder D/A converter), malgrado usino un
numero di componenti maggiore che non i convertitori con resistenze pesate, sono il tipo di
convertitore piu' largamente diffuso.
In fig. 6.14 (a) e' riportata la rete di conversione di un convertitore da quattro bit (fondo scala
± 7). Si puo' notare che vengono usati solamente due valori di resistenza, R e 2R.
E' facile calcolare la resistenza di uscita, pari a R, di tale rete, supponendo che tutti gli
interruttori siano connessi a massa. In tal caso infatti il circuito equivalente e' quello illustrato in fig.
6.14 (b). Questo valore di impedenza di uscita si conserva anche quando gli interruttori non sono
commutati a massa, purche' l'impedenza interna dei generatori di riferimento sia trascurabile rispetto
R.
2R
1
+VR
-VR
4
b3
2R
2
b4
RL
R
5
b2
R
2R
3
6
b1
2R
(a)
4
uscita
R
5
(b)
R
6
2R
2R
3
2
2R
1
2R
fig. 6.14
Il valore scelto per R dipende dal valore del carico RL, dalle variazioni che tale carico puo'
subire e dalla precisione del sistema. Solo nel caso in cui il carico sia di valore molto elevato, al
224
Capitolo VI
Conversione A/D e D/A
limite un circuito aperto, il valore di R e' determinato essenzialmente da considerazioni di velocita'
operativa. Quanto piu' bassa e' R tanto minore sara' l'impedenza di uscita e di conseguenza tanto
meno sensibili saranno gli effetti delle capacita' e delle conduttanze parassite.
La tensione di uscita a vuoto e' anche in questo caso calcolabile per sovrapposizione degli
effetti considerando che solo un bit alla volta valga 1 (a parte il bit di segno che determina
univocamente il segno della tensione di uscita). Con riferimento alla fig. 6.14 (a), indicando con
b4b3b2b1 la parola binaria di ingresso e supponendo di operare a circuito aperto si ottiene:
con b3b2b1= 100
V0 =
1
VR
2
V0 =
1
VR
4
con b3b2b1= 010
con b3b2b1= 001
1
V0 = VR
8
In definitiva:
1
1
1
V0 = .b 3 + .b 2 + .b1 .VR
4
8
2
La tensione di uscita sara' quindi compresa tra 0 e i 7/8 della tensione di riferimento VR. La
rete pertanto quantizza la tensione di riferimento in un appropriato numero di passi uguali, messi in
relazione con il numero rappresentato dalla parola binaria di ingresso. Estendendo quanto esposto a
parole di n bit, il passo di quantizzazione diviene ovviamente 1/2n , mentre il fondo scala e'
determinato dal massimo valore rappresentabile sugli n bit. Si ha cioe':
(
) V2
V0 fs = 2 n − 1 .
R
n
In generale la tensione di uscita sara':
1
1
1
V0 = .b1 + .b 2 + ...... + n .b n .VR
4
2
2
avendo indicato con b1 il bit piu' significativo della parola digitale di ingresso.
Se la resistenza RL di carico non fosse infinita la tensione di uscita che si ottiene e'
ovviamente:
V0' = V0 .
RL
RL + R
225
Capitolo VI
Conversione A/D e D/A
6.4.2) Altri tipi di convertitori D/A.
Oltre i tipi di convertitore D/A visti ne esistono ovviamente altri con strutture circuitali
diverse.
Tra essi puo’ venir citato il convertitore D/A a correnti pesate illustrato in figura 6.15, di
struttura particolarmente semplice.
4/7 I
V0A
2/7 I
RL
1/7 I
fig. 6.15
Esso si avvale di generatori di corrente comandati, che in caso di uscita unipolare sono molto
facili da realizzare. Qualche difficolta’ si puo’ avere per quanto riguarda l’accuratezza dello zero a
causa delle correnti di perdita in particolare quando si operi ad alta temperatura. Inoltre, quando la
resistenza di carico RL assume elevati valori, puo’ diventare alquanto problematico realizzare
sorgenti che abbiano resistenza d’uscita molto maggiore di quella di carico.
Di conseguenza la conversione a correnti pesate risulta conveniente solo in sistemi di
conversione di precisione medio-bassa in cui tuttavia si desiderino velocita’ di conversione elevate.
Un’ulteriore tipologia di convertitore D/A e’ quella detta a tensioni pesate, il cui schema di
principio e’ riportato in figura 6.16.
VR
R
R
R
R
a1
R
R
ingresso
binario
parallelo
R
R/2
a2
V0
R/6
a3
R
R
n
R/(2- 2)
an
fig. 6.16
226
Capitolo VI
Conversione A/D e D/A
In esso vengono generate frazioni binarie di corrente I/2, I/4, ...., I/2n dividendo la tensione di
riferimento in frazioni binarie con divisori resistivi del tutto convenzionali e sommando tali frazioni
alla giunzione somma di un amplificatore operazionale. Viene usato un interruttore per ciascun bit
del segnale di ingresso, controllato ciascuno da una separata linea di comando. Quando il livello del
segnale di controllo e' basso (zero logico) l'interruttore e' aperto e una corrente fluisce attraverso la
resistenza di ingresso fino alla giunzione somma, mentre quando e' il segnale di controllo e’ al
livello alto l'interruttore e' chiuso cortocircuitando a massa il resistore di ingresso.
Un convertitore D/A a tensioni pesate da 12 bit consiste pertanto di 48 resistori, di cui 36 di
precisione, di dodici transistori e di un amplificatore operazionale. I dodici transistori sono pilotati
direttamente dalle 12 linee che rappresentano il segnale binario di ingresso. Tali transistori sono
connessi in configurazione inversa in modo da dar luogo a basse tensioni di offset. A titolo di
esempio si puo' dire che con una corrente di base di 2 mA e una corrente di carico di 0.25 mA la
massima tensione di offset e' minore di 1 mV sull'intero campo di temperatura.
Il valore delle resistenze serie deve venir scelto come soluzione di compromesso tra l'esigenza
di avere basse correnti di carico nel transistore di commutazione e quella di mantenere le resistenze
le piu' basse possibili. Un valore che soddisfa abbastanza bene tali esigenze di aggira sui 40 kΩ.
Le due esigenze si potrebbero in effetti conciliare diminuendo la tensione di riferimento, ma
cio' introdurrebbe altri problemi, facendo aumentare il rapporto tra le tensioni da commutare e la
tensione di offset.
Il valore delle resistenze da inserire in parallelo puo' venir calcolato dalla relazione:
R pi =
R
2 −2
i = 1, 2, ...., n
i
che si ricava immediatamente qualora si consideri che al punto di inserzione dell'interruttore, a
interruttore aperto, deve essere presente una tensione pari a:
VR
2i
6.4.3) Pilotaggio di una giunzione somma.
L'uscita di uno qualsiasi dei convertitori descritti in precedenza, con l’eccezione di quello a
tensioni pesate, in cui tale provvedimento e’ gia’ presente nella struttura base, puo' essere connessa
ad una giunzione a somma nulla che si puo' ottenere facendo si' che la corrente fornita dal
convertitore D/A sia uguale ed opposta a quella fornita da altre sorgenti. Operando in tal modo si fa
si' che la giunzione somma sia sempre a tensione nulla, come se l'uscita del convertitore fosse
cortocircuitata a massa.
Un possibile esempio e' riportato in fig. 6.17, in cui l'uscita di un convertitore a resistenze
pesate e' collegata alla giunzione somma di un amplificatore operazionale.
E' opportuno ricordare che se il guadagno a catena aperta dell'amplificatore e' sufficientemente
elevato, la tensione presente alla giunzione somma e' praticamente nulla (massa virtuale) indipendentemente dalla tensione V0A presente all'uscita dell'amplificatore stesso.
In tali condizioni ciascun bit della parola digitale di ingresso che si trovi al valore logico 1
opera come una sorgente di corrente e alla giunzione somma deve essere soddisfatta la condizione:
I1 . b1 + I 2 . b 2 + I 3 . b 3 + I 4 . b 4 − I F = 0
227
Capitolo VI
Conversione A/D e D/A
avendo indicato con Ii la corrente entrante alla giunzione somma per effetto del bit i-esimo e con IF
la corrente uscente lungo la resistenza RF.
+VR
giunzione somma
-VR
R
b1
2R
b2
RF
K
V0A
massa virtuale
b
4R
3
8R
b4
fig. 6.17
Trasportando il tutto al caso di n bit si ottiene:
b
b
b
I F = VR . 1 + 2 + ...... + n −1n
2 .R
R 2.R
Poiche' V0A = - IF.RF, si ha in definitiva:
e il fondo scala e' dato da:
b
b
b
V0 A = − VR .R F . 1 + 2 + ...... + n −1n
2 .R
R 2.R
V0 FS = − VR .
RF
R0
dove R0 rappresenta l'impedenza di uscita della rete di conversione.
In sostanza la relazione trovata e' formalmente identica a quella che era stata ricavata in
assenza dell'amplificatore operazionale. In questo caso tuttavia si consegue il vantaggio di poter
scegliere entro certi limiti il valore della tensione di fondo scala scegliendo opportunamente il
valore di RF e di rendere la tensione di uscita indipendente dal valore della resistenza di carico. E'
bene osservare tuttavia che nelle realizzazioni integrate dei convertitori D/A molto spesso la
resistenza di reazione viene essa stessa integrata nel dispositivo.
E' infine opportuno illustrare un uso non del tutto convenzionale dei convertitori D/A presi in
esame. Con alcune semplici considerazione si ottiene che un convertitore connesso alla giunzione
somma di un amplificatore operazionale fornisce in uscita dello stesso la tensione:
− V0 = VR .
R F b1 b 2
b
. + + ...... + nn
R 2 4
2
228
Capitolo VI
Conversione A/D e D/A
avendo indicato con RF la resistenza di reazione e con R l'impedenza di uscita della rete di
conversione. Considerato che:
b1 b 2
b
b .2 n −1 + b 2 .2 n − 2 + ......+ b n .2 0 B
+
+ ...... + nn = 1
= n
2
4
2
2n
2
dove con B si e' indicato il valore rappresentato dalla parola binaria di ingresso, risulta evidente che,
se all'ingresso viene applicato un segnale Vi anziche' una sorgente di riferimento VR, in uscita si
ottiene una tensione:
V0 = − Vi .
R F .B
R .2 n
Si ottiene cioe' un amplificatore invertente il cui guadagno puo' essere controllato, con la
precisione propria dei convertitori D/A, attraverso l'uso di una parola digitale B da n bit tra un
valore nullo, quando B = 0, e il valore:
R F 2n − 1
.
R 2n
quando B e' tutta formata da 1. Il guadagno puo' essere controllato in passi discreti di ampiezza:
RF 1
.
R 2n
In sostanza il convertitore puo' essere visto come una resistenza variabile di valore
2n
R.
B
E' ovvio che il convertitore D/A puo' essere inserito anche nel loop di reazione. Il tal caso
l'espressione del guadagno e':
2n
V0
B
=−
Vi
Ri
R.
Anche in questo caso si ottiene un amplificatore il cui guadagno e' controllabile attraverso una
parola binaria, ma il legame tra il guadagno e B e' di proporzionalita' inversa. Per questo motivo
molto spesso in parallelo al convertitore viene connessa una resistenza fissa RF e il convertitore
viene utilizzato unicamente per ottenere piccole variazioni del guadagno nell'intorno del valore
nominale.
Quale ultima considerazione relativa ai convertitori che fanno uso di amplificatori
operazionali (in sostanza tutti i convertitori reperibili in commercio) e' necessario far notare che le
caratteristiche dell'amplificatore condizionano le prestazioni globali.
Le caratteristiche essenziali da prendere in considerazione in questo caso sono, come gia'
accennato, gli offset di tensione e di corrente e la loro dipendenza dalla temperatura, il guadagno, la
risposta di frequenza, lo slew rate e la massima ampiezza dall'uscita.
229
Capitolo VI
Conversione A/D e D/A
Nella maggior parte dei casi tuttavia solo l'offset costituisce un reale problema, in particolare
se il convertitore deve avere una precisione dello 0.05% del fondo scala nella gamma di temperatura
a norme MIL (-55° - 125° C). Cio' implica infatti che la tensione di uscita si debba mantenere
stabile entro il ± 0.01% del fondo scala o entro ± 1 mV del valore desiderato.
Nemmeno i piu' sofisticati amplificatori differenziali possono soddisfare questi requisiti e si
devono quindi applicare opportune tecniche di correzione dell'offset e della deriva.
Infine anche le alimentazioni degli amplificatori rivestono la loro importanza. Esse sono
generalmente duali e nonostante il buon PSRR (Power Supply Rejection Ratio) degli amplificatori
correntemente disponibili e' necessario che esse siano uguali in ampiezza, stabili entro il ± 1%, a
basso rumore, a bassa ondulazione residua con un'impedenza d'uscita la piu' bassa possibile.
6.4.3) Il convertitore D/A con rete a scala invertita.
Tutti i convertitori presi in esame fino a questo momento presentano una rete di resistori posta
tra gli interruttori analogici e l'amplificatore operazionale (fig. 6.18 (a)). Questa disposizione
circuitale da' luogo a parecchi inconvenienti. E' necessario infatti commutare tensioni relativamente
elevate rendendo necessari dei piloti a tensione elevata, che sono complessi e lenti. Le correnti che
attraversano i resistori variano al passaggio degli interruttori dallo stato ON a quello OFF e
viceversa. Poiche' tutti i resistori presentano elementi parassiti induttivi e capacitivi, le correnti che
vi fluiscono vanno a regime in un tempo che dipende dall'entita' degli elementi parassiti. Infine,
come si e' gia' detto, per aumentare la velocita' i resistori dovrebbero essere di basso valore, mentre
per ottenere la massima precisione tale valore dovrebbe essere elevato, in particolare rispetto
all'impedenza di conduzione degli interruttori.
Tutti questi problemi possono essere evitati, senza avere alcun inconveniente, se la posizione
della rete resistiva e degli interruttori viene invertita come illustrato in fig. 6.18 (b).
V
R
Interruttori
ingresso
digitale
analogici
di tensione
Rete
resistiva
V
0
(a)
V
R
Rete
resistiva
Interruttori
analogici
di tensione
ingresso
digitale
(b)
fig. 6.18
230
V
0
Capitolo VI
Conversione A/D e D/A
Se, ad esempio, nel convertitore con rete resistiva a scala la posizione degli interruttori e dei
resistori venisse invertita, come illustrato in fig. 6.19, dal punto di vista del funzionamento non
cambierebbe nulla tranne che per le specifiche che gli interruttori dovrebbero soddisfare.
Nella configurazione normale gli interruttori connettono i resistori di ingresso a una tensione
di riferimento VR o a massa. Nella configurazione invertita lo stesso interruttore, posto tra resistore
e giunzione somma dell'amplificatore operazionale, permette di inviare la relativa corrente o alla
giunzione somma citata o di richiuderla a massa. Connettendo la tensione di riferimento a quella che
normalmente e' l'uscita della rete a scala e connettendo a massa (eventualmente alla massa virtuale
dell'amplificatore operazionale) quelli che normalmente sono gli ingressi, nei resistori di ingresso
circoleranno delle correnti che sono delle frazioni binarie e che vengono poi opportunamente
sommate alla giunzione somma dell'operazionale.
VR
R
R
2R
2R
V0
2R
2R
R
2R
2R
fig. 6.19
In relazione agli interruttori si possono fare due considerazioni; innanzi tutto l'interruttore
diviene un commutatore di corrente, di piu' facile realizzazione. In secondo luogo le resistenze della
rete a scala possono essere grandi quanto si vuole poiche' le reattanze parassite perdono di importanza in quanto la corrente che circola sui resistori e' costante.
Un convertitore del tipo descritto richiede un interruttore e due resistori di precisione per
ciascun bit. Gli interruttori tuttavia risultano notevolmente meno complessi di quelli della
realizzazione tradizionale. Infatti, poiche' le resistenze della rete a scala possono essere
relativamente alte non e' necessario usare interruttori con impedenze di conduzione molto basse.
L'unico fattore che limita il valore delle resistenze della rete e' il loro ingombro che in una certa
misura puo' essere considerato proporzionale al valore resistivo. Un buon compromesso si
raggiunge di solito con R = 25 ÷ 50 kΩ.
Con questi valori resistivi un interruttore che abbia un'impedenza di conduzione di 75 Ω
introduce un errore di non linearita' di solo lo 0.03%. Questo errore inoltre puo' essere facilmente
corretto con un piccolo resistore di compensazione in serie con il resistore di reazione.
6.4.4) Precisione e accuratezza di conversione.
Le relazioni, che si sono trovate per i vari tipi di convertitore descritti ai paragrafi precedenti,
sono state ricavate nell'ipotesi di interruttori e resistori ideali. Nella pratica le cose vanno
diversamente in quanto i valori resistivi presenteranno sempre una certa tolleranza rispetto ai loro
valori nominali e gli interruttori, normalmente allo stato solido, avranno una resistenza di conduzione non nulla e una corrente di perdita anch'essa non nulla quando si troveranno nello stato
OFF.
231
Capitolo VI
Conversione A/D e D/A
C'e' inoltre da osservare che anche il segnale di pilotaggio degli interruttori puo' in una certa
misura presentarsi in uscita, introducendo un ulteriore errore.
In fig. 6.20 (a), nella quale si e' fatta l'ipotesi che il bit piu' significativo della parola binaria sia
al valore logico 1 mentre quello immediatamente successivo sia al valore logico 0, sono illustrati i
parametri tipici che contribuiscono a diminuire la precisione di conversione.
Le relazioni che sono state trovate in precedenza per la tensione di uscita erano funzione di
due sole quantita'; il valore della tensione di riferimento commutata da interruttori ideali posti
all'ingresso della rete resistiva ed i valori nominali dei resistori stessi.
Introducendo nelle relazioni i valori reali anziche' quelli ideali per VR e R si possono valutare
gli effetti sulla precisione.
E' bene notare che tutte le cause di errore possono esser fatte rientrare o nella tensione
equivalente di riferimento o nel valore relativo al resistore associato ad un particolare bit.
Nell'esempio, che si sta trattando, gli errori che possono essere associati alla rete resistiva sono le
tolleranze ±∆R e l'impedenza dinamica rs dell'interruttore definita come:
v
rs = ac
i ac
con vac tensione presente ai capi dell'interruttore in presenza di una corrente iac (a piccoli segnali),
nelle condizioni di funzionamento previste.
switch on
VR
± ∆VR
rg
VOF
Pilota dello
switch
bit piu' significativo
(1)
rs
± ∆R
ID
IR
R
V0A
switch off
switch off
± ∆ 2R 2R
IR
bit immediatamente successivo
(0)
VR
rs
Pilota dello
switch
agli altri bit
switch on
VOF
ID
(ID + I N ).rg
± ∆VR
(a)
(b)
VOF
rs
± ∆R
VOF
rs
± ∆ 2R 2R
R
agli altri bit
fig. 6.20
VOF, detta tensione di offset, e' invece la tensione che esiste ai capi di diversi tipi di interruttore analogico anche in assenza di corrente. In altre parole VOF non e' funzione della corrente che
232
Capitolo VI
Conversione A/D e D/A
fluisce attraverso l'interruttore verso la rete resistiva, ma e' generata all'interno del circuito a causa
del segnale di pilotaggio e si presenta ai suoi terminali in condizioni ON.
Se ad esempio come interruttore venisse utilizzato un normale diodo al silicio, commutandolo
in conduzione con una corrente di 1 mA, si avrebbe una tensione di offset VOF
approssimativamente di 0.6 volt. Tale tensione va algebricamente sommata alla tensione di
riferimento.
Anche l'impedenza della sorgente rg deve venir tenuta in considerazione, soprattutto quando la
commutazione dell'interruttore fa circolare su rg una corrente, dando luogo ad un errore nella
tensione di riferimento.
±∆VR rappresenta le variazioni di VR con il tempo, la temperatura, etc.
La corrente di perdita dell'interruttore OFF il piu' delle volte si puo' invece trascurare in
quanto e' di modestissima entita' e circola su rs e rg che normalmente sono di basso valore.
In fig. 6.20 (b) e' riportato un circuito equivalente semplificato dell'esempio precedente, in cui
sono state eliminate le sorgenti di errore meno significative, come ad esempio IR. rg e' stata
sostituita da una tensione equivalente di errore pari a (ID + IN).rg in serie con il riferimento.
Si tenga ora presente che il bit piu' significativo contribuisce all'uscita per circa la meta' della
tensione di fondo scala. Pertanto qualsiasi errore in serie con la tensione di riferimento contribuisce
in uscita con un errore pari alla meta' del suo valore. Il bit successivo contribuisce con peso 1/4 e
cosi' via fino al bit meno significativo, che contribuisce con un peso pari a 1/2n.
E' quindi evidente che e' necessario curare al massimo tutti i circuiti relativi al bit piu'
significativo per mantenere piccolo l'errore in uscita, mentre l'esigenza di elementi precisi e stabili si
va via via riducendo man mano che si procede verso i bit meno significativi.
Queste considerazioni sono vere anche per i resistori della rete a scala e per le resistenze serie
degli interruttori, che connettono la sorgente di riferimento alla rete stessa.
Per meglio chiarire le cose si supponga di avere a che fare con un convertitore da 10 bit. Il
peso del bit meno significativo e' 1/1024 e quindi anche se il resistore relativo ha una tolleranza del
10% esso determina in uscita un errore che e' solamente lo 0.01% del fondo scala. Sulla base di
queste considerazioni e' intuibile che l'accuratezza totale e' dello stesso ordine di grandezza di quella
dei singoli resistori. Infatti, detta p l'accuratezza percentuale dei resistori e P l'accuratezza
percentuale dell'uscita rispetto il fondo scala, si ha:
1
1 1
P = p. + + ...... + n ≅ p
2
2 4
6.5) I convertitori D/A seriali.
Da quanto esposto ai paragrafi precedenti si puo' intuire che i convertitori paralleli sono
notevolmente veloci. Essi tuttavia richiedono un considerevole numero di componenti. D'altronde
spesso la loro elevata velocita' non puo' venir utilizzata poiche' il segnale di ingresso e' in forma
seriale, l'amplificatore d'uscita e' lento oppure il sistema analogico che utilizza l'uscita del convertitore ha delle costanti di tempo molto grandi e quindi non e' richiesta un'elevata velocita' operativa.
Per tali motivi sono stati sviluppati convertitori D/A seriali, ottenendo una maggior
semplicita’ circuitale, con un minor numero di componenti e a minor costo, a spese della velocita'.
Cio' non significa naturalmente che tutti i convertitori seriali siano lenti; spesse volte, come nel caso
dei convertitori ciclici, essi sono rapidi almeno quanto un convertitore D/A parallelo che agisca in
unione con un buffer serie-parallelo.
Tutti i convertitori seriali si basano sul principio operativo illustrato in fig. 6.21. Il segnale
binario di ingresso XSB controlla il funzionamento del convertitore bit per bit. Se durante il periodo
233
Capitolo VI
Conversione A/D e D/A
attivo di clock Ti il segnale XSB e' al valore logico 1 alla tensione Vi immagazzinata in un
condensatore (rappresentato in figura dal blocco memoria analogica) viene sommata la tensione di
riferimento VR e la somma risultante viene divisa per due. Se XSB e' zero allora Vi viene semplicemente ridotta a meta'. Come risultato di queste operazioni si ha una tensione Vi+1, che viene
memorizzata nella capacita' in modo da essere disponibile al successivo periodo di clock Ti+1. Si ha
cioe':
Vi+1 =
1
.(Vi + a i .VR )
2
dove ai e' il bit della parola binaria XSB al tempi Ti.
La tensione immagazzinata nella capacita' durante l'ultimo tempo di bit rappresenta l'uscita del
convertitore. Poiche' tale tensione e' disponibile soltanto durante un breve periodo durante ciascun
tempo di parola e' necessario un circuito di ritenuta per ottenere una tensione di uscita costante.
X SB (Ti )
+VR
-VR
+
1/2
Vi+1
Vi
X SB (TS )
Memoria analogica
fig. 6.21
I convertitori seriali usualmente operano ad una frequenza fc di clock pari a quella del segnale
di ingresso. In altre parole il funzionamento del convertitore e' sincronizzato dalla temporizzazione
del segnale binario di ingresso XSB. Tale segnale e' normalmente fornito direttamente al convertitore, il bit meno significativo per primo, e l'eliminazione di qualsiasi tipo di buffer realizza una
considerevole economia circuitale.
All'inizio della conversione e' evidentemente necessario forzare la tensione Vi a zero e tale
operazione viene effettuata mediante un impulso di sincronizzazione immediatamente seguente il
periodo del bit piu' significativo. Tale impulso riazzera la tensione Vi del condensatore dopo aver
trasferito il valore ivi presente a un circuito di ritenuta.
I convertitori D/A seriali si prestano molto bene a tecniche di multiplazione poiche' sia
l'ingresso che l'uscita sono realizzati con una singola linea. Utilizzare un convertitore seriale da 12
bit per 10 segnali di ingresso richiede un commutatore elettronico ad una via e 12 posizioni, dove
per ottenere la stessa cosa con un convertitore parallelo sarebbe necessario un commutatore a 12 vie
e 10 posizioni.
Per ragioni di semplicita', pur senza togliere nulla alla generalita' della descrizione, nel seguito
verranno presi in esame solo convertitori seriali unipolari. Essi possono d'altra parte essere
trasformati in dispositivi a funzionamento bipolare con semplici tecniche, che tuttavia dipendono
234
Capitolo VI
Conversione A/D e D/A
dal tipo di rappresentazione usato per il segnale binario di ingresso; ne' la presentazione in modulo e
segno, ne' la presentazione binaria offset sono molto pratiche per convertitori seriali a
funzionamento bipolare e non saranno quindi prese in considerazione.
Al contrario la rappresentazione complemento a 2 o a 1 puo' essere implementata su qualsiasi
convertitore seriale con l'aggiunta di un unico interruttore analogico e di una tensione di riferimento
-VR, come illustrato sempre in fig. 6.21. L'interruttore analogico commuta tale tensione di riferimento all'ingresso del convertitore durante il periodo di clock Ts relativo al bit di segno. In tal modo
la tensione VR viene sottratta dalla tensione Vi. Per operazioni bipolari quindi la relazione
precedentemente trovata va modificata in:
1
.(Vi + a i .VR )
2
1
Vu = .(Vis − a is .VR )
2
Vi+1 =
per
i ≠ is
per
i = is
dove is e' l'indice relativo all'ultimo bit dell'ingresso, cioe' quello piu' significativo.
Con lo stesso ingresso binario l'uscita di un convertitore seriale bipolare e' sempre la meta' di
quella di un convertitore unipolare. Cio' e' ovviamente dovuto al fatto che il bit piu' significativo e'
utilizzato allo scopo di realizzare operazioni bipolari.
6.5.1) Il convertitore seriale Shannon-Rack.
Il convertitore Shannon-Rack risolve il complesso problema della conversione D/A seriale
ricorrendo a un minimo numero di componenti e sfruttando la curva esponenziale di scarica di un
condensatore.
Nello schema di principio di fig. 6.22 un generatore di corrente carica con una corrente
costante Ic una capacita' C durante la prima meta' di ciascun periodo di clock quando il segnale
binario all'ingresso rappresenta un uno logico.
XSB
fc
G1
S1
Ic
S4
Vc
S2
C
R
V0
Cst
S3
fc
G2
fc
Ts
fc
G3
fig.6.22
Durante la seconda meta' del periodo di clock la capacita' C viene scaricata sulla resistenza R
mediante l'interruttore analogico S3.
235
Capitolo VI
Conversione A/D e D/A
Se invece durante un particolare periodo di clock il segnale di ingresso XSB e' uno zero logico
la capacita' C non viene caricata, non essendo abilitato il relativo gate G1, mentre la scarica durante
la seconda meta' del periodo di clock avviene comunque.
La scarica esponenziale della capacita' puo' essere messa in relazione con gli impulsi della
parola seriale di ingresso dalla relazione:
Vc = VR .2 − k
dove Vc e' la tensione ai capi della capacita' dopo il k-esimo periodo di clock e VR e la tensione
iniziale ai capi del condensatore dopo la prima meta' del primo periodo si clock.
Affinche' cio' sia vero e' sufficiente che:
R=
Tc
.ln2
2 .C
dove Tc rappresenta il periodo di clock.
La relazione appena introdotta mostra che durante la seconda meta' di ciascun periodo di clock
la tensione ai capi della capacita' C viene dimezzata. Tenendo presente che, per ciascun uno logico
presente nel segnale di ingresso, la tensione ai capi della capacita' viene aumentata di VR durante la
prima meta' del periodo di clock, ne risulta che alla fine di ciascun periodo tale tensione puo' essere
espressa con una conveniente frazione di VR. Al numeratore di tale frazione si avra' il valore
decimale rappresentato dal segnale binario di ingresso pervenuto fino a quell'istante, mentre al denominatore si avra' la potenza di due relativa alla posizione dell'ultimo bit pervenuto. In sostanza si
ha:
k
VCk = VR . ∑ a i .2 i − k −1
i =1
dove con VCk si e' indicata la tensione ai capi del condensatore dopo il k-esimo periodo di clock
mentre ai e' il bit al periodo i-esimo.
A titolo di esempio si consideri l'ingresso binario da 8 bit 00101011 = 4310. In fig. 6.23 sono
riportati il segnale binario di ingresso ordinato dal bit meno significativo al piu' significativo e la
tensione ai capi della capacita' C in funzione del tempo. L'uscita Vu e' la tensione Vc ai capi della
capacita' durante la prima meta' del nono periodo di clock ed e' proporzionale all'ingresso digitale
XSB.
Nello schema di principio di fig. 6.22 i componenti base del convertitore Shannon-Rack sono
un generatore a corrente costante, quattro interruttori analogici, due amplificatori di separazione,
due capacita' di memoria e tre gate AND.
Vi e' una grande varieta' di scelta tra gli interruttori, siano essi realizzati con transistori
bipolari o a FET. La scelta piu' opportuna viene a dipendere dalla logica usata nella parte bipolare di
controllo. In linea di massima si puo' affermare che con logiche bipolari si rivelano maggiormente
adatti i FET a giunzione, mentre con logiche MOS o CMOS vengono preferiti gli interruttori MOS
236
Capitolo VI
Conversione A/D e D/A
T1
T2
T3
-8
-7
-6
T9
T1
fc
Ts
Sincronismo
2
X SB
1
2
1
2
2
0
1
0
1
0
-1
0
2
0
-8
1
Vc
3
4
VR
11
16
43
64
VR
VR
2
V
R
43
3
8
VR
11
V
32 R
128
VR
43
256
VR
fig. 6.23
Le funzioni svolte dai quattro interruttori dello schema di massima riportato in fig. 6.22 sono
le seguenti:
S1 permette la carica alla corrente costante Ic della capacita' C durante
•
la prima meta' di ciascun periodo Ti di clock nell'ipotesi che durante
tale intervallo di tempo XSB valga 1.
•
S2 cortocircuita C in modo da scaricarlo durante il periodo di reset Ts.
•
S3 connette la capacita' C alla resistenza R durante la seconda meta'
di Ti per scaricarla esponenzialmente.
•
S4 trasferisce durante la prima meta' del periodo di reset la tensione
Vc ad un circuito di ritenuta formato dal condensatore Cst e da un
amplificatore operazionale.
Quale amplificatore di separazione tra la rete RC e il circuito di ritenuta viene impiegato un
inseguitore di tensione, che presenta un'impedenza di ingresso estremamente elevata, rendendo
superfluo l'uso di uno stadio di ingresso a FET.
L'interruttore S4 in unione con Cst e un secondo inseguitore di tensione realizza il circuito di
ritenuta. Tale circuito non richiede particolari caratteristiche di velocita' essendo la tensione Vc
costante durante la prima meta' del periodo Ts di reset.
Sebbene il convertitore Shannon-Rack sia estremamente semplice dal punto di vista circuitale,
esso non e' mai stato usato in forma estensiva. La ragione risiede nel fatto che tale tipo di
convertitore non e' molto preciso. Tuttavia utilizzando dispositivi FET o MOS e amplificatori
237
Capitolo VI
Conversione A/D e D/A
operazionali di basso offset e elevata impedenza di ingresso, appare ragionevole parlare di una
precisione dello 0.1% del fondo scala. E' necessario d'altra parte prevedere una regolazione della
rete RC in quanto la sua costante di tempo deve venir determinata sulla base della frequenza fc di
clock. Inoltre e' molto discutibile quale sia la gamma di temperatura su cui la precisione citata puo'
essere mantenuta, in quanto e' difficile e costoso produrre condensatori con coefficiente di temperatura molto basso. Infine il progetto di ogni circuito lineare e' generalmente un compromesso tra
prestazioni statiche e dinamiche. Cio' e' vero in modo particolare per il convertitore Shannon-Rack,
in cui la temporizzazione dei vari passi operativi e' essenziale in rapporto alla precisione statica.
Per quanto riguarda la velocita' di conversione e' ovvio che essa e' determinata interamente
dalla velocita' degli interruttori analogici. Ad esempio con tempi di commutazione di 300 nsec. la
frequenza del clock non deve superare approssimativamente i 10 kHz se si vuole che gli errori
dovuti agli interruttori analogici non superino lo 0.1%. Cio' da' luogo a un tempo totale di conversione di 1.2 msec. per parole digitali da 12 bit.
6.5.2) Il convertitore seriale “sample-hold”.
Un tipo diverso di convertitore seriale e' quello sample-hold o convertitore a ritenuta,
realizzato con tre circuiti S/H e il cui schema di principio e' riportato in fig. 6.24.
Il principio di funzionamento di ciascuno di questi tre circuiti e' identico; quando l'interruttore
S e' chiuso il condensatore C si carica alla tensione V, combinazione lineare delle tensioni presenti
all'ingresso del circuito di ritenuta stesso. Quando l'interruttore S e' aperto, l'uscita del circuito di
ritenuta si mantiene al valore V raggiunto.
Il primo circuito di ritenuta della figura 6.24 somma una tensione di riferimento VR all'uscita
V02 del secondo circuito di ritenuta e moltiplica tale somma per un fattore 1/2. Il secondo circuito di
ritenuta ha un solo ingresso, al quale e' applicata la tensione V01. Il suo fattore di amplificazione e'
unitario e quindi V02 e' uguale in ampiezza a V01.
S1
R
+VR
C1
S3
R
S4
C
2R
S2
2
V01
2R
XSB
R
V02
S/H 2
S/H 1
+
V0
C
T
fc
Ti
G1
fc
Ti
G2
fig. 6.24
I due circuiti di ritenuta sono connessi ad anello e i due interruttori S3 e S4 vengono azionati
alternativamente, uno nella prima meta' del periodo di clock, l'altro nella seconda meta', in modo
che quando V01 varia V02 rimane costante e viceversa.
Il segnale digitale di ingresso XSB aziona direttamente l'interruttore S1 in modo che in
corrispondenza agli 1 logici del segnale di ingresso la tensione applicata al primo Sample-Hold sia
pari a VR.
Poiche' l'interruttore S3 e' chiuso durante la prima meta' del periodo di clock Ti, la tensione di
uscita e':
238
Capitolo VI
Conversione A/D e D/A
V01 =
1
.(V02 + a i .VR )
2
avendo indicato con ai il valore del bit della parola di ingresso presente al tempo i. La variazione
rispetto al valore precedente avviene con una costante di tempo RC, dove R e C sono i valori di
resistenza e capacita' inseriti sul ramo di reazione dell'amplificatore operazionale.
Durante la seconda meta' di Ti la tensione V01 e' trasferita al secondo circuito Sample-Hold
con la chiusura dell'interruttore S4 e la tensione V02 diventa uguale a V01. Si completa cosi’ un
ciclo operativo. Le operazioni durante tutti gli altri cicli si susseguono identiche facendo si' che
l'uscita del convertitore alla fine dell'intera parola di ingresso sia proporzionale al valore da
rappresentato da quest’ultima.
In fig. 6.25 e' riportato l'andamento delle tensioni nei vari punti del circuito in corrispondenza
all'ingresso seriale 000000101011. Il formato di parola dura pertanto 12 periodi di clock, da T1 a
T12; ciascun periodo viene poi considerato diviso in due parti, Ti e Ti .
Si suppone inoltre che esista un impulso di reset (sincronizzazione), sempre nullo eccetto che
al tempo T13 e che il tempo necessario a caricare i condensatori dei circuiti S/H sia piccolo in
rapporto a Ti. Si tenga infine presente che l'interruttore S3 e' chiuso durante il semiperiodo Ti,
mentre S4 e' chiuso durante il semiperiodo Ti .
Il circuito di un convertitore seriale Sample-Hold consiste di quattro interruttori analogici, tre
amplificatori operazionali, due gate AND a due ingressi ed alcuni componenti discreti.
I due interruttori S3 e S4 connessi ai circuiti di Sample-Hold devono avere una capacita'
ingresso-uscita la piu' piccola possibile, poiche' operano direttamente alla giunzione somma
dell'operazionale; in caso contrario l'energia che attraverso essi si trasferisce durante le operazioni di
commutazione potrebbe caricare erroneamente le due capacita' di memorizzazione C1 e C2.
Nell’applicazione presa in esame, come in molte altre in cui siano usati circuiti di ritenuta, si
richiede che l'uscita segua l'ingresso con l'errore massimo di un millivolt. Di conseguenza per
caricare correttamente il condensatore di ingresso e' necessario che il periodo di clock sia pari
almeno a nove costanti di tempo. In altre parole, se si volesse un periodo di clock di 10 µsec. la costante di tempo di carica del condensatore dovrebbe essere dell'ordine del microsecondo. Sono
quindi imposte delle specifiche abbastanza pesanti ai valori di resistenza e capacita' e inoltre anche
lo slew rate degli amplificatori operazionali dev'essere di buon valore.
Ad esempio, con una costante di tempo di carica di 1 microsecondo, con R = 10 kΩ e C = 100
pF, l'amplificatore deve avere una velocita' di salita di 6 V/µsec. e tale specifica e' abbastanza
pesante per un buon numero di amplificatori operazionali monolitici. A cio' si aggiunge che se il
valore assunto per R appare ragionevole quello di C e' troppo basso.
Di conseguenza si deve il piu' delle volte giungere ad un compromesso e la soluzione piu'
semplice e' quella di ridurre la velocita'. A titolo di esempio, se si scegliesse un periodo di clock di
50 µsec. valori ragionevoli per il circuito Sample-Hold potrebbero essere R = 10 kiloohm, C = 500
picofarad e slew-rate di 1.2 V/µsec.
Un importante vantaggio del convertitore Sample-Hold rispetto a quello Shannon-Rack e' che
le sue prestazioni, entro larghi limiti, non dipendono ne' dalla precisione, ne' dalla stabilita' dei
condensatori. E' questo un fattore molto importante in quanto, come gia' e' stato detto, condensatori
di elevata precisione e stabilita' sono difficili da realizzare e molto costosi.
239
Capitolo VI
Conversione A/D e D/A
T1
T 2 T3
1
1
T12 T 13 T1
fc
T13
XSB
V01
0
1
3
4 VR
0
11
V
16 R
1
0
0
0
0
0
0
43
V
64 R
1
V
2 R
43
V
128 R
3
8 VR
11
V
32 R
43
V
256 R
3
4 VR
V 02
43
V 43
512 R
V
1024 R
t
1
V
2 R
3
V
8 R
t
fig. 6.25
Altro importante vantaggio si ha per il fatto che i tempi di commutazione degli interruttori
analogici non sono critici, poiche' essi al massimo limitano la velocita' operativa. Le prestazioni
statiche e dinamiche del convertitore dipendono in pratica solo dalle prestazioni del circuito
Sample-Hold usato.
E' ragionevole pensare che la precisione del circuito illustrato schematicamente in fig. 6.24 sia
almeno dello 0.1% del fondo scala ad una frequenza di clock di 10 kHz. La risoluzione puo'
raggiungere qualsivoglia valore, semplicemente variando la temporizzazione del segnale di reset
T13.
Con una frequenza di clock di 10 kHz il tempo di conversione per parole binarie da 12 bit e' di
1.2 msec. E' ovvio tuttavia che sulla base delle caratteristiche di componenti piu' moderni si possono
ottenere delle precisioni e delle velocita' operative considerevolmente piu' alte.
6.5.3) Il convertitore seriale ciclico.
Un ulteriore tipo di convertitore D/A seriale, che evita tutti gli inconvenienti del convertitore
Shannon-Rack e' quello ciclico. Esso differisce da quello Sample-Hold in quanto usa solo due
amplificatori operazionale e alcune resistenze di precisione; e' tuttavia necessario un numero
maggiore di interruttori analogici. Uno dei suoi pregi risiede nel fatto che e' notevolmente piu'
veloce che non quello Sample-Hold.
Il convertitore ciclico, illustrato in fig. 6.26, usa due interruttori S1 e S2 per collegare
l'ingresso di un amplificatore A1 ad una tensione di riferimento o a terra.
240
Capitolo VI
Conversione A/D e D/A
T12
S3
XSB
V0
Cst
S1
fc
VR
R
S2
Vk
A1
fc
S4
CA
R
fc
fc
S7
S5
X SB
CB
S8
T1
fig. 6.26
Altri tre interruttori, S3, S4 e S5, sono usati per collegare l'uscita dell'amplificatore alle
capacita' di memorizzazione Cst, CA e CB. Infine altri tre interruttori, S6, S7 e S8, servono a
connettere l'ingresso di A1 a CA, CB o a terra. A1 lavora come inseguitore di tensione con guadagno
pari a 0.5.
Chiudendo gli interruttori S1 e S8 la tensione di uscita Vk sara':
Vk =
VR
2
mentre chiudendo gli interruttori S1 e S6 si avra':
1
(VR + VCA )
2
L'interruttore S1 viene azionato quando un bit dell'ingresso binario seriale XSB rappresenta un
uno logico, mentre quando e' uno zero logico viene azionato l'interruttore S2. Gli interruttori
connessi all'uscita S3, S4 e S5, sono controllati rispettivamente dal bit piu' significativo T12, dalla
frequenza di clock fc e dalla sua negazione f c . Analogamente gli interruttori di controreazione S6,
S7 e S8 sono commutati da f c , fc e T1, segnale di ingresso durante il primo periodo di clock.
Vk =
Un 1 logico presente al bit meno significativo di XSB da' quindi luogo alla seguente sequenza
operativa:
VR
2
VR
Vk =
4
Vk =
241
durante
T1
durante
T2
Capitolo VI
Conversione A/D e D/A
VR
durante
T3
8
................................................
V
Vk = R
durante
T12
4096
Vk =
Cio' sta ad indicare, come per i precedenti convertitori seriali, la relazione di proporzionalita’
tra l'uscita analogica e il valore espresso dalla parola binaria di ingresso.
Una miglior comprensione di come il convertitore ciclico operi si puo' avere dall'esame delle
forme d'onda di fig. 6.27.
T1 T2 T3
T 11 T 12 T 1 T 2
fc
T12
X SB
1
1
1
2
0
1
0
1
0
0
0
0
0
0
1
1
VR
3
8
VR
11
V
32 R
43
V
128 R
V CA
43
V
512 R
3
4
VR
11
V
16 R
43
V
2048 R
t
43
V
64 R
non in
scala
V CB
43
V
256 R
43
V
1024 R
43
V
4096 R
t
fig. 6.27
Si noti che il segnale seriale di ingresso e' 000000101011, il formato della parola e' di 12
periodi di clock da T1 a T12, il tempo richiesto per caricare le capacita' di memorizzazione e' piccolo
in rapporto a Ti, la capacita' di memorizzazione CA e' caricata sempre attraverso S4 durante i periodi
pari di clock, mentre quella CB nei periodi dispari attraverso S5. Inoltre quando CA si carica
attraverso S4, S6 e' aperto e viceversa, quando S6 e' chiuso per riportare in controreazione la
tensione VCA, S4 e' aperto; analogamente, quando CB si carica attraverso S5, S7 e' aperto e quando
S7 e' chiuso S5 e' aperto.
Dalla fig. 6.27 si vede che durante il primo periodo di clock T1 XSB e' un uno logico. Gli
interruttori S1 e S8 connettono all'ingresso rispettivamente la tensione di riferimento VR e la massa,
S4 collega Vk a CA, S7 riporta all'ingresso VCB, ma poiche' anche S8 e' chiuso la capacita' CB si scarica istantaneamente in modo che nessuna tensione viene effettivamente riportata all'ingresso. Vk
diventa allora pari a VR/2 e carica CA a tale valore.
242
Capitolo VI
Conversione A/D e D/A
Durante T2 XSB e' a 1, gli interruttori S1 e S6 connettono ad A1 rispettivamente la tensione
VR e VCA, pari a VR/2, mentre S5 collega l'uscita dell'amplificatore A1 a CB. Vk diventa allora pari
a 3.VR/4 e CB si carica a tale valore.
Durante il periodo T3 XSB e a zero, gli interruttori S2 e S7 connettono all'ingresso di A1
rispettivamente zero volt e VCB, pari a 3.VR/4. S4 collega l'uscita dell'amplificatore al condensatore
CA che si carica ad una tensione pari a 3.VR/8.
Il ciclo prosegue poi in maniera analoga e le operazioni successive si possono agevolmente
seguire dalla fig. 6.27 a dalla tabella 6.2.
Durante l'ultimo impulso di clock, T12, l'uscita dell'amplificatore A1 viene collegata per
mezzo di S3 al condensatore di memorizzazione Cst in modo da realizzare una tensione di uscita
costante durante tutto il tempo di parola. Poiche' Cst deve mantenere l'uscita fissa per 12 periodi di
clock essa non deve venir assolutamente caricata e il metodo piu' semplice per far si' che cio' sia
realizzato, ottenendo nel contempo una bassa impedenza d'uscita, e' quello di ricorrere ad un
ulteriore amplificatore di separazione.
TABELLA 6.2
X
T1
T2
T3
T4
T5
T6
T7
T8
T9
T10
T 11
T12
SB
Interruttori chiusi
VCA
V CB
V0
1
S1 S4 S 7 S 8
1/2 VR
0
------
1
S1 S 5 S 6
1/2 VR
3/4 VR
------
0
S 2 S4 S 7
3/8 VR
3/4 VR
------
1
S1 S 5 S 6
3/8 VR
11/16 VR
------
0
S 2 S4 S 7
11/32 VR
11/16 VR
------
1
S1 S 5 S 6
11/32 VR
43/64 VR
------
0
S 2 S4 S 7
43/128 VR
43/64 VR
------
0
S1 S 5 S 6
43/128 VR
43/256 VR
------
0
S 2 S4 S 7
43/512 VR
43/256 VR
------
0
S1 S 5 S 6
43/512 VR
43/1024 VR
------
0
S 2 S4 S 7
43/2048 VR
43/1024 VR
------
0
S1 S 3 S 5
43/2048 VR
43/4096 VR
S6
43/4096 VR
In sostanza quindi il circuito di un convertitore D/A ciclico a singolo canale consiste,
escludendo l'amplificatore di separazione dell'uscita, in un amplificatore, otto interruttori analogici,
tre capacita' di memorizzazione e due resistenze di precisione.
La resistenza di conduzione di tutti gli interruttori, con l'eccezione di S3, deve essere al
massimo di 100 Ω e quelle di S1 e S2 devono essere uguali a quelle di S6, S7 e S8 entro il 10% se si
vuole che l'errore totale dovuto agli interruttori analogici sia minore dello 0.02% del fondo scala,
quando per le resistenze del circuito si sceglie il valore di 50 kΩ.
La resistenza di conduzione dell'interruttore S3 non e' critica in quanto va a influire solamente
sulla costante di tempo di carica di Cst.
Non e' necessario che il tempo di commutazione degli interruttori sia inferiore a 1 µsec.
poiche' di solito la velocita' operativa viene limitata degli amplificatori e non dagli interruttori.
E' bene far notare che gli interruttori di reazione S6 e S7 non possono essere del tipo a
transistori bipolari ad accoppiamento diretto, in cui la corrente di base fluisce verso il circuito di
segnale, in quanto questo fatto potrebbe alterare il valore di tensione che viene memorizzato nei
243
Capitolo VI
Conversione A/D e D/A
condensatori. Le specifiche possono essere soddisfatte da vari tipi di interruttori serie FET o MOS,
malgrado che alcuni di essi, in particolare quelli MOS, debbano venir selezionati per limitare la
dispersione della resistenza di conduzione entro il 10%. Inoltre gli interruttori MOS hanno lo
svantaggio che l'impedenza di conduzione varia in funzione dell'ampiezza del segnale di ingresso.
Si puo' comunque affermare che la scelta finale dell'interruttore e' determinata dal tipo di
logica usata nei circuiti digitali di controllo associati al convertitore.
Quando si deve operare ad elevate velocita' di conversione l'amplificatore A1, oltre ad avere
bassi offset, deve avere elevato "slew rate" e deve poter fornire in uscita elevate correnti. Per una
frequenza di clock di 100 kHz la velocita' di salita deve essere almeno di 6V/µsec. e l'amplificatore
deve essere in grado di fornire almeno 10 mA.
Fattore molto importante per la precisione e l'accuratezza della conversione e' poi la
precisione del divisore di ingresso, mentre esse non sono affatto influenzate dal valore delle
capacita' di memorizzazione CA, CB e Cst . Una loro eventuale variazione cambia unicamente la
costante di tempo di carica e influisce di conseguenza solo sulla velocita' di conversione. Tuttavia
per evitare significative perdite di carica e' bene che tali capacita' siano di grande valore rispetto alla
capacita' di ingresso dell'amplificatore e alle capacita' parassite del circuito.
La velocita' di conversione di un convertitore D/A ciclico puo' essere fino a 20 volte superiore
a quella di un convertitore Sample-Hold. Una prima riduzione per due dei tempi si ha per il fatto
che un ciclo di conversione richiede un periodo di clock lungo la meta' che non quello del convertitore Sample-Hold. La riduzione dei tempi di un ulteriore fattore 10 deriva dal fatto che le
capacita' vengono caricate attraverso le resistenza di conduzione di interruttori analogici anziche'
l'impedenza di controreazione dell'amplificatore S/H, che si puo' appunto ritenere mediamente
maggiore di un fattore 10.
Si puo' concludere quindi che la velocita' di conversione piu' alta si ottiene a spese di un
amplificatore piu' rapido, in grado di fornire elevate correnti di uscita, ma senza sacrificare la
precisione statica. Il prodotto precisione velocita' e' percio' venti volte piu' alto che non per il
convertitore Sample-Hold e quindi per ottenere determinate prestazioni si possono usare componenti di minor qualita' e minor costo. Con un progetto accurato e con una frequenza di clock di 100
kHz il convertitore ciclico puo' raggiungere una precisione dello 0.05% del fondo scala.
Il tempo richiesto per una conversione completa di parole da 12 bit e' a questa frequenza di
120 µsec.
6.5.4) Il convertitore seriale ad equalizzazione di carica.
Il convertitore seriale ad equalizzazione di carica e' semplice come quello Shannon-Rack, ma
non presenta gli stessi problemi.
Esso implementa l'equazione fondamentale, che sta alla base delle conversione seriale,
basandosi sul principio che quando un condensatore scarico viene connesso in parallelo ad uno
carico si ha circolazione di corrente dall'uno all'altro finche' le tensioni ai capi dei due condensatori
non siano diventate uguali.
Se i due condensatori hanno lo stesso valore di capacita', la carica finale su ciascuno d'essi e'
la meta' di quella accumulata inizialmente in quello carico.
Il principio base e' implementato nel convertitore ad equalizzazione di carica come illustrato
nello schema di massima di fig. 6.28.
Vi sono due interruttori S1 e S2 che caricano la capacita' C1 alla tensione VR o la scaricano a
massa in funzione del valore assunto dal XSB.
Un terzo interruttore S3 collega la capacita' C1 a C2 in modo da equilibrare la carica; un
quarto interruttore S4 trasferisce la carica da C2 a Cst quando la conversione e' stata completata.
244
Capitolo VI
Conversione A/D e D/A
fc
T13
X SB
fc
fc
Vout
VR
S3
S1
S2
C1
V
0
S4
C2
Cst
fc
X SB
T13
fig. 6.28
L'interruttore S4, l'amplificatore e la capacita' Cst costituiscono il circuito d'uscita di tipo
Sample-Hold.
Durante il normale ciclo operativo, l'interruttore S1 o quello S2 sono sempre chiusi durante la
prima meta' di ciascun periodo di clock e sempre aperti durante la seconda meta'. L'interruttore S3 e'
invece sempre aperto durante il primo semiperiodo e sempre chiuso durante il secondo semiperiodo
di Ti.
S1 e' azionato dal segnale che si ricava dal prodotto logico di XSB e della frequenza di clock
fc, S2 del prodotto logico della negazione di XSB e fc, mentre S3 e' azionato direttamente dalla
negazione di fc. Il ciclo operativo inizia durante il primo periodo T1, quando e' presente il bit meno
significativo di XSB.
Se questo bit e' un 1 logico, l'interruttore S1 viene chiuso durante la prima meta' di T1 e la
capacita' C1 si carica alla tensione VR. Durante la seconda meta' di T1 si chiude S3 e C2 si carica
alla tensione VR/2. Si e' assunto evidentemente che C2 sia stato completamente scaricato prima che
inizi il periodo T1.
Se il successivo bit di XSB e' ancora un 1 logico, la sequenza di azionamento dei due
interruttori S1 e S3 gia' illustrata fa si' che dapprima C1 si carichi alla tensione VR e
successivamente C2 raggiunga la tensione
1
VR + .VR
2
= 3V
R
2
4
Se invece il secondo bit e' uno zero logico dapprima viene azionato S2 poi S3 in modo che C2
raggiunga una tensione pari a 3.VR/4. Il ciclo si ripete poi in modo identico in tutti i successivi
periodi di clock.
Le operazioni di presentazione dell'uscita e di rimessa a zero vengono compiute durante il
tredicesimo periodo di clock.
La presentazione dell'uscita e' effettuata durante la prima meta' di T13, chiudendo
l'interruttore S4 e caricando Cst, supposto uguale in valore a C2, al valore di VC2/2. La rimessa a
zero e' fatta durante la seconda meta' di T13 chiudendo simultaneamente S2 e S3 e scaricando in tal
modo sia C1 che C2.
Il convertitore a equalizzazione di carica e' formato solamente da quattro interruttori analogici,
quattro porte logiche, tre condensatori di memorizzazione e un amplificatore.
245
Capitolo VI
Conversione A/D e D/A
I quattro interruttori devono essere realizzati con transistori ad effetto di campo e devono
avere la possibilita' di commutare tensioni comprese tra 0 e 10 volt. Essi devono inoltre essere tali
da avere basse correnti di perdita nella condizione OFF e bassissime capacita' parassite tra ingresso
e uscita.
Non e' necessario invece che abbiano base resistenze di conduzione, che determinano
unicamente le velocita' con cui i vari condensatori si caricano.
Se, ad esempio, si assume che C1 e C2 abbiano una capacita' di 1000 pF e che per caricare con
la voluta precisione tali condensatori siano necessarie 10 costanti di tempo e infine che la resistenza
Ron sia di 1000 ohm, in modo tale che la relativa costante di tempo sia di 1µsec., allora ciascun periodo di clock dev'essere di 20 µsec. con una frequenza di clock di 50 kHz.
Il tempo totale di conversione di una parola da 12 bit e' in questo caso di 260 µsec.
I valori delle capacita' C1, C2 e Cst devono essere uguali tra loro entro lo 0.05% sull'intero
campo operativo di temperatura. Il loro valore non e' critico ed e' determinato solamente dalla
velocita' di conversione desiderata e dalle capacita' parassite degli interruttori analogici.
6.6) Conversione indiretta.
I convertitori paralleli e seriali visti ai paragrafi precedenti possono essere classificati anche
come convertitori diretti in quanto convertono direttamente un segnale di tipo digitale in una
grandezza analogica. Al contrario i convertitori che verranno ora presi in considerazione devono
essere visti come dispositivi indiretti in quanto in un primo tempo convertono il segnale digitale in
un segnale intermedio e successivamente quest'ultimo nel segnale analogico d'uscita.
Questo modo di operare consente di economizzare sui componenti circuitali, in modo
particolare sui resistori e gli interruttori analogici, a scapito della velocita' di conversione.
Si possono distinguere due tipi di convertitori D/A indiretti; quelli che convertono dapprima il
segnale digitale in un treno di impulsi modulati in durata e successivamente tale segnale in una
tensione e quelli che come segnale intermedio si avvalgono di un treno di impulsi modulati in
frequenza.
Il vantaggio del segnale intermedio risiede nel fatto che esso puo' essere generato facilmente
dal segnale digitale e facilmente poi essere trasformato in un segnale in continua. Lo svantaggio di
ambedue i tipi sta nel fatto che l'informazione non puo' essere presentata direttamente all'uscita, ma
deve essere estratta dal segnale intermedio con un procedimento di media.
Lo schema a blocchi semplificato di fig. 6.29 mostra che un convertitore D/A indiretto puo'
essere considerato formato da due unita'; una sezione digitale che trasforma il segnale digitale nel
segnale intermedio e una sezione analogica che converte il segnale intermedio in una tensione continua.
Per convertire l'informazione digitale in un treno di impulsi modulati in durata si usa un
normale contatore unidirezionale, che viene posizionato inizialmente al valore Xp rappresentato
dall'informazione digitale. Successivamente tale contatore conta all'indietro fino a zero. Si fa si' che
l'uscita sia alta per tutto il tempo di conteggio da Xp a zero.
Per convertire invece il segnale digitale in un treno di impulsi modulati in frequenza si ricorre
al "binary rate multiplier" che genera uno specifico numero di impulsi stretti per intervallo di tempo.
Il numero degli impulsi generati per intervallo T costante e' direttamente proporzionale all'ingresso
digitale Xp.
La conversione da treno di impulsi a tensione continua viene fatta in ambedue i casi con lo
stesso circuito. Un interruttore analogico, con pure funzioni di formatore di impulso, viene usato per
ottenere degli impulsi di tensione rettangolari di ampiezza definita e costante. Il filtro passabasso ne
fa la media, estraendone la componente continua in modo che la tensione risultante sia proporzionale o alla durata o alla frequenza di ripetizione degli impulsi.
246
Capitolo VI
Conversione A/D e D/A
Poiche' sia la durata che la frequenza degli impulsi e' in ciascun caso proporzionale a Xp
anche l'uscita in continua del convertitore e' proporzionale a Xp.
ingresso digitale parallelo
T
tx
Rf
modulazione di
fc
durata
Interruttore
Circuiti Digitali
analogico
T
Sezione digitale
Filtro
passabasso
Sezione analogica
Modulazione di
frequenza
RB
V0
-VR
fig. 6.29
La conversione in impulsi e la successiva operazione di filtraggio sono operazioni lente. Ad
esempio, affinche' un contatore possa contare da 212 a 0 con una frequenza di clock di 1 MHz sono
necessari approssimativamente 4 msec. Ne consegue che la frequenza di ripetizione degli impulsi
modulati in durata in uscita di un convertitore che operi con una frequenza di clock da 1 MHz non
potra' superare 1 250 Hz.
Cio' significa ancora che il convertitore fornira' al massimo 250 campioni di informazione al
secondo.
Per estrarre il segnale in continua sara' poi necessario un filtro con costante di tempo molto
superiore al periodo T di ripetizione degli impulsi. Per questa ragione la massima frequenza del
segnale di uscita del filtro passabasso non sara' che una piccola frazione della frequenza di
ripetizione degli impulsi.
Quindi se si suppone sia essenziale che il segnale di ingresso sia campionato 100 0 piu' volte
per periodo, allora con un convertitore la cui frequenza di campionamento sia 250 Hz potranno
venir trattati segnali con una frequenza massima di 2.5 Hz.
Questo semplice esempio mostra chiaramente le limitazioni di velocita' della conversione
indiretta. Tuttavia vi sono moltissime applicazioni in cui la frequenza del segnale di ingresso e'
inferiore all'hertz e nelle quali la conversione indiretta puo' essere utilmente impiegata.
Se tuttavia sono necessarie velocita' di conversione elevate vi sono diversi metodi per
ottenerle. Un primo modo per aumentare la velocita' di un convertitore D/A indiretto e' quello di
aumentare la frequenza di clock. Vi sono ovviamente delle limitazioni sulla massima frequenza
utilizzabile.
Una seconda via potrebbe essere quella di usare meno bit nella parola digitale di ingresso, ma
di solito il progettista non puo' intervenire a questo livello, in quanto il numero di bit risulta fissato
dalla risoluzione desiderata.
E' molto piu' usuale fare ricorso a convertitori a velocita' multipla ("multi-speed"); questa
tecnica tuttavia, come verra' illustrato piu' avanti, richiede dei circuiti addizionali e quindi
l'incremento di velocita' viene ottenuto con un aumento di costo, complessita', dimensioni e peso del
circuito.
Come per i convertitori visti ai paragrafi precedenti, anche i convertitori indiretti che verranno
presi in esame saranno del tipo unipolare; essi ovviamente possono essere facilmente convertiti per
operazioni bipolari.
247
Capitolo VI
Conversione A/D e D/A
Dei vari modi atti a rappresentare segnali bipolari il piu' opportuno e' quello binario offset.
Infatti da un punto di vista circuitale i segnali bipolari impulsivi sono piu' convenientemente
rappresentati in forma binaria offset e in ciascuno dei convertitori che verranno esaminati esiste un
amplificatore d'uscita che puo' venir usato allo scopo di eliminare la polarizzazione introdotta dalla
rappresentazione. Per rimuovere tale polarizzazione e' necessaria unicamente una resistenza
connessa tra ingresso dell'amplificatore e una sorgente di riferimento VR (vedi fig. 6.30). La
corrente che fluisce in tale resistenza deve essere uguale alla componente continua della corrente
che fluisce quando solo il bit piu' significativo di Xp vale 1. Si noti che, in corrispondenza all'ingresso 100000000000, la durata dell'impulso, quando il segnale intermedio e' un treno modulato in
durata, e' uguale a meta' del periodo di ripetizione T. Si ha cioe':
tx =
T
2
Un segnale a modulazione di durata che presenti un'informazione bipolare nella forma
descritta e' detto "polarizzato a mezza scala" o "polarizzato al 50%".
Analogamente, per lo stesso segnale di ingresso Xp, la frequenza degli impulsi, nella tecnica a
modulazione di frequenza, e' meta' della massima frequenza possibile, che coincide con quella fc del
clock.
6.6.1) Convertitore a modulazione di durata a singola velocita’.
Un convertitore D/A indiretto, che ha una notevole diffusione malgrado le limitazioni di
velocita' che presenta, e' quello a modulazione di durata a singola velocita', il cui schema di
principio e' riportato in fig. 6.31.
Xp
a12 a 11 a 10
T
a1
VB
0
load
clock
Contatore bidirezionale da 12 bit
VR
tx
0
+VR
Rivelatore di zero
Interruttore
analogico
3R
R
R
C
R
V0
C
fig. 6.31
Il motivo della sua diffusione puo' essere ritrovato nel fatto che esso puo' essere costruito con
alcuni circuiti integrati e alcuni componenti discreti.
Nella parte digitale del convertitore, il cui schema di principio e' riportato in fig. 6.32, un
segnale di ingresso Xp parallelo viene applicato sotto il controllo di un segnale di LOAD agli ingressi di preset di un contatore asincrono binario da 12 bit che viene azzerato all'inizio di ciascun
periodo di ripetizione T. Non appena Xp e' caricato nel contatore, l'uscita del rivelatore di zero si
porta al valore logico 1 chiudendo l'interruttore che connette il clock all'ingresso di conteggio del
contatore. Quest'ultimo inizia a contare all'indietro e quando lo zero viene raggiunto l'uscita del
248
Capitolo VI
Conversione A/D e D/A
rivelatore di zero passa al valore logico 0. A questo punto l'interruttore si riapre, interrompendo il
collegamento tra clock e ingresso del contatore, che rimane quindi nello stato raggiunto finche' non
vi viene caricato un nuovo dato Xp.
a 12
a 11
a 10
a1
load
clock
preset
Q
T
preset
preset
preset
Q
Q
T
T
Q
T
fig. 6.32
Si definisce larghezza tx dell'impulso che si ottiene in uscita il tempo necessario a contare da
Xp a zero. Il massimo valore di tx, che si ha per Xp = 111....1 e' pari al periodo di ripetizione T,
mentre il minimo, per Xp = 000....0, e' tx = 0.
Per ottenere un treno continuo di impulsi modulati in durata e' necessario che all'inizio di
ciascun periodo di ripetizione all'ingresso del contatore venga presentato un dato binario parallelo.
Si puo' utilizzare un buffer binario parallelo come memoria temporanea, se Xp in tale istante non
fosse disponibile. Allo stesso modo se l'ingresso digitale fosse in forma binaria seriale si deve
prevedere un buffer ad ingresso seriale e uscita parallela agli ingressi di preset del contatore.
La porzione analogica del convertitore, illustrata nella parte destra della fig. 6.31, trasforma il
treno di impulsi in una tensione continua che varia linearmente con la durata degli impulsi stessi.
Questi pilotano l'interruttore analogico, connettendo una tensione positiva di riferimento VR al filtro
passabasso, mentre in loro assenza l'ingresso del filtro viene collegato a massa.
L'uscita dell'interruttore analogico e' quindi ancora un treno di impulsi modulati in durata, ma
di ampiezza rigorosamente limitata tra 0 e VR. Il filtro passabasso estrae il valore medio dal treno di
impulsi. Se la costante di tempo del filtro e' grande rispetto al periodo di ripetizione del segnale
impulsivo, la tensione continua che ne risulta e' linearmente legata alla durata tx degli impulsi e di
conseguenza all'ingresso digitale Xp.
In questo tipo di convertitore non e' necessario fare ricorso a contatori sincroni. Infatti quando
un contatore conta all'indietro e il bit meno significativo commuta a zero, tutti gli altri bit piu'
significativi si trovano gia' a zero e quindi non vi possono essere segnali spuri dovuti ad alee.
L'interruttore analogico del convertitore in esame deve collegare il filtro passabasso alla
tensione VR o a massa con offset trascurabili e alla velocita' la piu' alta possibile. Il tipo di
interruttore scelto dipende dalla logica usata nella parte digitale del convertitore, non trascurando le
considerazioni legate al costo, alle dimensioni e alla facilita' di reperimento.
Se la parte digitale fosse realizzata in tecnologia MOS, gli interruttori analogici potrebbero
venir ricavati dallo stesso substrato.
249
Capitolo VI
Conversione A/D e D/A
L'implementazione piu' conveniente del filtro passabasso e' quella che fa uso di un filtro RC a
due stadi le cui frequenze caratteristiche siano almeno di due ordini di grandezza inferiori della
massima frequenza contenuta nel segnale impulsivo, in modo da ottenere un'attenuazione di almeno
80 dB alla frequenza di ripetizione del treno di impulsi e una rotazione di fase minima.
Il valore delle resistenze del filtro e' scelto in modo da caricare quanto meno possibile
l'interruttore analogico, non solo in continua, ma anche alle varie frequenze del segnale modulato.
L'amplificatore operazionale all'uscita del filtro passabasso fa si' la tensione venga fornita in uscita a
bassa impedenza.
La precisione totale del convertitore a modulazione di durata a singola velocita' e' funzione
delle caratteristiche dei componenti lineari, cioe' dell'interruttore analogico, delle quattro resistenze
e dell'amplificatore operazionale.
Assumendo che gli offset e la linearita' dell'amplificatore diano luogo a errori trascurabili e
che il rapporto tra la somma delle resistenze di ingresso e quella di reazione sia pari a 1 entro lo
0.025%, allora la precisione totale e' funzione esclusivamente delle caratteristiche dell'interruttore
analogico. Se si usa un interruttore serie-parallelo realizzato con transistori bipolari con tempo di
commutazione minore di 100 nsec. e offset minore di 2 mV (valori del tutto ragionevoli per tale tipo
di realizzazione) l'errore totale e' di solito inferiore allo 0.02% del fondo scala.
Il tempo di commutazione di 100 nsec da' luogo ad un errore dello 0.0025%, 0.005% o 0.01%
rispettivamente quando la massima durata dell'impulso e' tx max = 4, 2 o 1 msec.
Si tenga presente che tx max e' funzione della frequenza di clock fc e del numero n di bit dalla
parola binaria di ingresso.
tx
max
=
2n
fc
Il tempo richiesto per una conversione di 12 bit e' quindi di 4 msec. con una frequenza di
clock di 1.024 MHz, mentre e' di 1 msec. con una frequenza di 4.096 MHz.
6.6.2) Convertitore a modulazione di durata a doppia velocita’.
Le prestazioni del convertitore a singola velocita' possono essere notevolmente migliorate con
l'aggiunta di un interruttore analogico, tre resistenze e due condensatori. Il convertitore a doppia
velocita' che ne deriva, puo' allora lavorare alla stessa velocita' di conversione di quello a singola
velocita', ma con una frequenza di clock piu' bassa, o a parita' di frequenza di clock ad una velocita'
di conversione maggiore.
Questo risultato viene raggiunto, come illustrato in fig. 6.33, dividendo il contatore a 12 bit in
due contatori da 6 bit ciascuno con il proprio rivelatore di zero e con il proprio controllo del clock.
I sei bit meno significativi della parola binaria Xp vengono caricati nel contatore 1, quelli piu'
significativi nel contatore 2.
L'uscita della porta A1, che rivela il passaggio attraverso lo stato 0, e' un impulso tx1 modulato
in durata, funzione del tempo necessario a contare il numero rappresentato dai bit meno
significativi. L'uscita tx2 della porta A2 e' un impulso di durata proporzionale al numero
rappresentato dai bit piu' significativi. In sostanza il funzionamento di ciascuno di questi due
contatori e' identico a quello da 12 bit del convertitore a singola velocita'.
250
Capitolo VI
Conversione A/D e D/A
parola binaria X p
a a
12
clock
a
11
7
aa
6
a
5
1
Contatore da 6 bit
Contatore da 6 bit
A1
A2
VR
t x2
t x1
S2
100 k
40 k
40 k
C
20 k
C
V0
VR
S1
2.56 M 2.56 M 1.28 M
C
C
fig. 6.33
Ciascuno dei due segnali tx controlla un interruttore analogico, con funzione di formatore di
impulsi. C'e' da notare, per quanto riguarda le caratteristiche di offset di questi interruttori, che esse
sono le stesse dell'analogo interruttore del convertitore a singola velocita'; la rapidita' di
commutazione invece deve essere notevolmente superiore in quanto la massima durata dell'impulso
tx e' solamente 1/64 di quella del caso preso in esame al paragrafo precedente e se si vuole che
l'errore rimanga limitato entro lo 0.05% e' necessario che le differenza tra i tempi di commutazione
in salita e in discesa si mantenga molto piccola.
Il modo piu' semplice per risolvere questo problema e' ovviamente quello di diminuire la
frequenza di clock, ad esempio a 250 kHz. In tal caso la durata massima di tx e' 256 µsec. e la
differenza massima tra i tempi di commutazione degli interruttori, tale l'errore si mantenga entro lo
0.05 %, si puo' valutare in 128 nsec, specifica che puo' venir facilmente soddisfatta da diversi tipi di
interruttore analogico.
Per tener conto che a parita' di durata dell'impulso le due grandezze analogiche rappresentate
da tx1 e tx2 stanno tra loro in rapporto 1:64, i valori resistivi dei due filtri passabasso devono essere
diversi. Cio' fa si' che, ad esempio, per uno dei filtri l'insieme delle resistenze abbia un valore pari a
100 kΩ, mentre l'altro ha un valore totale di 6.4 MΩ.
Uno dei canali cioe' e' scalato rispetto all'altro di 64, valore dato dal rapporto tra qualsiasi bit
del contatore 2 e il suo omologo nel contatore 1.
Dal punto di vista delle prestazioni e del costo dei componenti un ragionevole compromesso
si ha con una frequenza di clock di 250 kHz che permette circa 4000 conversioni al secondo. Non e'
difficile in tal caso raggiungere la precisione dello 0.05% anche con interruttori analogici non eccessivamente veloci.
6.6.3) Convertitore a modulazione di frequenza a singola velocita’.
Il convertitore D/A a modulazione di frequenza a singola velocita' impone agli interruttori
analogici delle caratteristiche molto pesanti; d'altra parte se si usano interruttori dal costo
ragionevole la velocita' di conversione e' notevolmente minore che nel caso del convertitore a
modulazione di durata.
251
Capitolo VI
Conversione A/D e D/A
Per questi motivi il convertitore a modulazione di frequenza a singola velocita' viene in
pratica usato solo in quelle applicazioni in cui il segnale modulato in frequenza e' comunque
necessario per altri circuiti.
Come illustrato nello schema di principio di fig. 6.34 la parte digitale del circuito e' realizzata
mediante un "binary rate multiplier", i cui ingressi sono il segnale binario Xp e l'uscita differenziata
del contatore principale. Esso allora genera in uscita un treno di impulsi rettangolari stretti.
Larghezza e altezza di questi impulsi sono costanti, ma il numero di impulsi durante un intervallo di
tempo costante T varia in funzione dell'ingresso digitale Xp.
Il massimo numero di impulsi durante il periodo T e' legato alla frequenza del clock fc che
alimenta il contatore principale. Il minimo numero di impulsi e' zero.
a 1 a 2 a3
VR
a 12
S1
Binary rate multiplier
5R
2R
2R
R
C
f1 f 2 f3
f 12
Differenziatori digitali
f c f c fc
2 4 8
T
VB
fc
2 12
0
tp
Contatore principale da 12 bit
Clock
V0
C
fc
fig. 6.34
In questo tipo di convertitore il segnale di ingresso Xp deve essere presente in continuita'
all'ingresso; se cio' non fosse possibile e' necessario ricorrere ad un buffer che memorizza il dato da
inviare al "binary rate multiplier".
La parte analogica del convertitore e' simile a quella del convertitore a modulazione di durata,
eccetto che per l'interruttore analogico che deve essere notevolmente piu' veloce. Tale esigenza e'
determinata dal fatto che, mentre per il convertitore a modulazione di durata si ha un solo impulso
per periodo T con una durata massima pari al periodo di ripetizione, in quello a modulazione di
frequenza delle stesse caratteristiche si possono avere fino a 4096 impulsi per periodo di ripetizione
T. Se quindi il periodo di ripetizione dei due convertitori e’ uguale, ciascun impulso del convertitore
a modulazione di frequenza puo’ essere fino a 4096 volte piu' breve dell'unico impulso del
convertitore a modulazione di durata. E' d'altronde ragionevole e conveniente assumere un periodo
di ripetizione uguale per i due tipi di convertitore in quanto e' la massima frequenza del segnale da
convertire che determina il tempo massimo disponibile per ogni conversione.
Per ottenere la stessa precisione dai due tipi di convertitore la larghezza degli impulsi del
segnale modulato in frequenza deve essere mantenuta con la stessa precisione del segnale modulato
in durata, intendendo per precisione la variazione di larghezza dell'impulso in rapporto alla sua
larghezza totale. Se, ad esempio, la larghezza totale fosse di 10 µsec ± 10 nsec allora la precisione
sarebbe dello 0.1%.
Pertanto se si desiderasse realizzare un convertitore a modulazione di frequenza da 12 bit con
un periodo T di ripetizione di 4.096 msec, allora la massima larghezza di ciascuno dei 4096 impulsi
sarebbe di 1 µsec.
252
Capitolo VI
Conversione A/D e D/A
Per ottenere la modesta precisione dello 0.1 % sarebbe necessario controllare la durata
dell'impulso entro ± 1 nsec. Chiaramente questa e' una specifica molto difficile da soddisfare per
qualsiasi tipo di interruttore analogico.
Piu' realisticamente, si potrebbe pensare di utilizzare interruttori analogici con errori
dell'ordine di 10 ÷ 20 nsec e in tal caso per raggiungere una precisione dello 0.025% la durata di
ciascun impulso del segnale modulato in frequenza dovrebbe essere almeno di 80 µsec.
Ne consegue che il periodo di ripetizione per il convertitore a 12 bit sarebbe di 4096 . 80 =
320 msec. Con questa bassa velocita' di conversione (circa tre conversioni al secondo) il
convertitore a modulazione di frequenza diverrebbe usabile solo per segnali la cui frequenza
massima fosse di 0.03 Hz.
I circuiti logici limitano a loro volta la precisione del convertitore. Infatti per realizzare
impulsi entro i 20 nsec sarebbe necessaria una frequenza di clock di 50 MHz, che costringerebbe ad
usare famiglie a velocita' discretamente elevata.
6.6.4) Convertitore a modulazione di frequenza a tripla velocita’.
Le limitazioni operative inerenti il convertitore a modulazione di frequenza a singola velocita'
possono essere superate riarrangiando il circuito pur senza complicarlo eccessivamente. Il risultato
che si ottiene e' il cosiddetto convertitore a tripla velocita'. In questo convertitore il "binary rate
multiplier" da 12 bit di fig. 6.34 e' suddiviso in tre elementi da 4 bit, come illustrato in fig. 6.35.
a1
fc
a2
a3
a4
a5
a6
a7
a8
a9
a10
a 11
a12
Contatore
principale
Clock
f1
f1
f2
f3
S1
B.R.M. 1
Logica di generazione
degli impulsi
f1
f2
f3
f2
f3
f3
f4
R
C
16 R
16 R
C
C'
2R
V0
f4
S3
B.R.M. 3
f1
f2
S2
B.R.M. 2
f4
R
256 R
256 R
C
f4
fig. 6.35
Questo accorgimento permette di eliminare otto stadi nel contatore principale e la necessita'
dei 12 derivatori digitali. Sono invece necessarie, come mostrato in fig. 6.36, tre porte logiche per
produrre a partire dal contatore principale quattro treni di impulsi non sovrapposti.
253
Capitolo VI
Conversione A/D e D/A
T
f c /2
f c /2
fc /2
fc /4
fc /4
f1
fc /2
f2
fc /8
fc /16
fc /4
f3
1
fc /8
2
3
1
f4
4
5
2
7
3
1
fc /2
6
8
4
2
f1
f2
f3
1
fc /4
f4
fc /8
fc /16
fig. 6.36
A ciascun "binary rate multiplier" vengono forniti i quattro treni di impulsi e quattro bit
dell'ingresso parallelo Xp. Le relative uscite sono dei treni di impulsi la cui frequenza e' legata al
numero rappresentato dai quattro bit di Xp.
Il massimo numero di impulsi durante un periodo di ripetizione T e' ora solamente 16, quando
tutti i bit di Xp in ingresso al "binary rate multiplier" sono degli uno logici. Il minimo numero di
impulsi e' zero quando questi quattro bit sono zero.
Per completare il convertitore sono necessari tre interruttori analogici e tre filtri passabasso.
Cio' nonostante l'eliminazione di otto stadi di conteggio e dei 12 derivatori digitali fa si' che il
circuito rimanga piu' semplice che non quello del convertitore a singola velocita'.
E' evidente che per un corretto funzionamento le correnti fornite alla giunzione somma
dell'amplificatore operazionale per effetto dei bit meno significativi devono essere rispettivamente
in rapporto 1/16 e 1/256 con quella derivante dai bit piu' significativi.
Infine per avere dei segnali di uscita precisamente sincronizzati e' opportuno che il contatore
principale sia di tipo sincrono.
Il circuito di generazione dei treni di impulsi di fig. 6.36 ha come ingressi le uscite del
contatore principale e in uscita fornisce quattro treni di impulsi f1, f2, f3 e f4 caratterizzati dal fatto
che nessuno dei loro impulsi si sovrappone.
Il "binary rate multiplier", illustrato in fig. 6.37, e' realizzato con solo cinque porte logiche. La
frequenza piu' elevata f1 e' controllata dal bit piu' significativo, quella immediatamente successiva f2
dal bit piu' significativo tra i rimanenti e cosi' via.
Le uscite di ciascuna porta AND sono poi sommate su una porta OR. L'uscita finale del
circuito e' quindi un treno di impulsi definibile come:
R x = a1. f1 + a 2 . f2 + a 3 . f3 + a 4 . f4
254
Capitolo VI
Conversione A/D e D/A
a1
a
2
a3
a4
Rx
f1
f2
f
f4
3
fig. 6.37
oppure:
R x = N x . fc
dove Nx e' il numero rappresentato dagli specifici bit di Xp.
La parte analogica del convertitore a tripla velocita' e' realizzata con tre interruttori analogici,
tre filtri passabasso a singolo stadio e un amplificatore operazionale. Ciascuno dei tre filtri consiste
in due parti: un primo filtro RC nello stadio di ingresso dell'amplificatore e un secondo filtro in
reazione. Tale arrangiamento circuitale e' adottato in quanto si possono in tal modo eliminare tre
resistenze di precisione e due condensatori.
Ciascuno dei filtri deve presentare un'attenuazione di almeno 40 dB alla frequenza di
ripetizione, il che equivale a dire che la loro frequenza di taglio si deve trovare due decadi piu' in
basso di tale frequenza.
Come nel convertitore a modulazione di durata, le prestazioni del convertitore a tripla
velocita' sono determinate esclusivamente dagli errori degli interruttori analogici, se si suppone che
gli errori dovuti all'offset dell'amplificatore siano trascurabili e che i rapporti tra le resistenze siano
esatti entro lo 0.025%.
C'e' da notare tuttavia che solo l'interruttore relativo alla velocita' piu' alta deve essere molto
preciso; per le altre velocita' sono sufficienti interruttori di minori prestazioni, poiche' le correnti
prodotte alla giunzione somma sono solamente 1/16 o 1/256 della corrente generata dalla catena alla
velocita' piu' alta.
6.7) Conversione A/D.
6.7.1) Considerazioni generali.
Effettuare una conversione analogico-digitale (A/D) significa quantizzare l'ampiezza di una
grandezza fisica in un insieme di livelli discreti in modo da ottenere, tramite un'opportuna unita' di
misura e una codificazione, un numero rappresentante la misura della grandezza stessa.
La conversione A/D e' utilizzata negli strumenti ad indicazione numerica, nella telemetria,
nella memorizzazione dei dati e soprattutto per l'elaborazione automatica.
255
Capitolo VI
Conversione A/D e D/A
Il principio della quantizzazione di un segnale analogico e' illustrato in fig. 6.38.
Si osservi che per effetto della quantizzazione ogni valore S*i del segnale analogico compreso
nell'intervallo Si ÷ Si+1 viene associato sempre al medesimo livello Ni.
N
quantizzazione
Ni
Si S*i S i+1
S
segnale analogico
fig. 6.38
L'intervallo Si+1 - Si = Q viene definito "intervallo o passo di quantizzazione"; si vede
immediatamente che con il processo di quantizzazione si commette un errore. Se si indica con S*i il
generico valore associato al livello Ni , l'errore massimo sara' pertanto pari a ± Q/2. Tale errore e'
detto errore di quantizzazione.
E' ovvio che quanti piu' livelli di quantizzazione si hanno a disposizione tanto minore sara'
l'errore di quantizzazione; pertanto un parametro molto importante che caratterizza un convertitore
A/D e' il numero di livelli di quantizzazione. Un altro parametro che caratterizza le prestazioni di un
convertitore e' il tempo di conversione, che permette di stabilire se il convertitore e' in grado di
effettuare le conversione di un segnale variabile nel tempo senza perdita di informazione.
Dato un segnale variabile nel tempo la sequenza delle operazioni da effettuare per convertirlo
in un insieme di valori discreti si puo' descrivere come segue:
•
Operazione di campionamento, tramite la quale vengono prelevati i valori istantanei
del segnale analogico. La frequenza del campionamento deve essere tale da garantire
la completa ricostruzione del segnale originale e pertanto, se F e' la massima frequenza
contenuta nel segnale analogico, la frequenza di campionamento minima deve essere
pari almeno a 2F.
•
Operazione di "ritenuta" del segnale campionato per mantenere inalterato il valore del
segnale per tutto il tempo di conversione.
•
Operazione di conversione A/D propriamente detta e codificazione per la
rappresentazione numerica del segnale.
Oltre l'errore di quantizzazione appena definito vi sono altri errori che derivano dal fatto che
la caratteristica reale di un convertitore A/D si discosta da quella ideale per tutta una serie di motivi.
Tra di essi si possono citare i seguenti:
256
Capitolo VI
Conversione A/D e D/A
•
Errore di zero, quando si ha in uscita una codificazione corrispondente allo zero con
un segnale di ingresso non nullo.
•
Errore di codificazione dei livelli discreti.
•
Errore di non linearita'.
Questi tre tipi di errore sono illustrati in maniera qualitativa in fig. 6.39.
segnale digitale
caratteristica ideale
caratteristica reale
non linearita'
errore di
codificazione
segnale analogico
errore di zero
fig. 6.39
Vi sono inoltre altre cause di errore provocate da rumore, instabilita' e derive degli elementi
circuitali. Tutte queste cause costituiscono il limite fisico insuperabile dal punto di vista delle
prestazioni di un convertitore A/D.
I convertitori A/D possono venir suddivisi in molti modi, in base alle loro modalita' di
funzionamento e alle loro caratteristiche elettriche.
Dal punto di vista delle loro caratteristiche funzionali si puo' parlare di convertitori "ad anello
aperto", di convertitori "in controreazione" e di convertitori "veloci o flash".
6.7.1) Convertitori ad anello aperto.
Rientrano in questa categoria i convertitori tensione-frequenza e quelli a rampa semplice,
doppia e multipla.
a) Convertitori tensione - frequenza.
In un convertitore tensione - frequenza la tensione Vi da convertire viene applicata ad un
blocco circuitale la cui uscita e' un treno di impulsi di frequenza
F = K. Vi + F0
dove K e' una costante di proporzionalita' che dipende dal convertitore e F0 e' la frequenza d'uscita
che si ottiene quando la tensione di ingresso e' nulla.
Tale tipo di convertitore e' generalmente caratterizzato dalla semplicita' circuitale, ma la sua
linearita', la precisione, la stabilita' e la rapidita' di conversione sono normalmente modeste.
257
Capitolo VI
Conversione A/D e D/A
La gamma dei possibili tipi di convertitore tensione - frequenza e' molto vasta e si va da
semplici circuiti ricavati da multivibratori astabili, in cui la frequenza di uscita ha di solito un
legame logaritmico con la tensione di ingresso e la cui precisione e' limitata, a complessi circuiti di
prestazioni piu' che discrete. A titolo di esempio lo schema di principio di un convertitore ricavato
dall'opportuna modifica di un multivibratore astabile e' riportato in fig. 6.40.
+V
Vi
R
R
C
C
F
fig. 6.40
Assumendo che la tensione di collettore dei transistori nello stato di interdizione coincida in
pratica con V, cioe’ trascurando le cadute ai capi dei transistori in saturazione e le correnti di
perdita, si ricava che, in prima approssimazione, il periodo T di oscillazione e':
V
T = 2.RC. ln1 +
Vi
Il legame tra tensione di ingresso e frequenza e' pertanto di tipo logaritmico; per linearizzare
la dipendenza tra tensione di ingresso e frequenza di uscita si adottano configurazioni circuitali che
consentono di alimentare le basi dei transistori a corrente costante, sostituendo le resistenze R con
generatori di corrente.
Migliori caratteristiche si possono ottenere con stadi impieganti circuiti integrati lineari
secondo lo schema di principio illustrato in fig. 6.41.
Vi
F
fig. 6.41
258
Capitolo VI
Conversione A/D e D/A
Come si puo' vedere, il primo operazionale e' utilizzato come stadio integratore in modo da
generare una tensione a rampa la cui pendenza dipende dal valore della tensione Vi da convertire. Il
secondo stadio realizza un comparatore con isteresi che commuta quando la tensione a rampa
raggiunge i valori prefissati dalla rete di reazione positiva. La sua uscita e' utilizzata per scaricare
periodicamente il condensatore dell'integratore tramite un interruttore che di solito viene realizzato
con un FET. Quanto piu' elevata e' la tensione Vi tanto maggiore e' la frequenza di commutazione e
curando la realizzazione circuitale si riescono ad ottenere elevate linearita'.
Altri tipi di convertitore V/F si basano sull'impiego di FET, utilizzati in oscillatori RC come
resistenze variabili in funzione di una tensione, oppure sull'impiego di diodi varicap in oscillatori
LC o ancora utilizzando dei transistori unigiunzione.
A titolo di esempio in fig. 6.42 viene riportato lo schema di principio di un oscillatore RC
impiegante un amplificatore operazionale, in cui le resistenze della rete a scala sono costituite da
FET.
Vi
fig. 6.42
b) Convertitore A/D a rampa semplice.
Lo schema di principio del convertitore a rampa semplice e' riportato in fig. 6.43.
Per semplicita' si e' omesso in ingresso il blocco di sample and hold necessario per mantenere
costante il segnale applicato al convertitore durante il tempo di conversione e si e’ supposto che il
segnale Vi da convertire sia esclusivamente unipolare.
Conmando di conversione
S
generatore di
rampa
Q
VR
S
R
Contatore
Fc
Clock
Vi
fig. 6.43
Un impulso di comando di conversione determina l'istante di partenza delle operazioni di
conversione. Tale impulso azzera il contatore, mette nello stato "ON" il flip-flop RS, consentendo
259
Capitolo VI
Conversione A/D e D/A
pertanto che attraverso la porta AND la frequenza di clock Fc possa pervenire al contatore stesso, e
da' inizio alla generazione locale di una tensione a rampa, che viene confrontata tramite un comparatore con la tensione Vi da convertire. Finche' la tensione a rampa si mantiene inferiore a Vi
l'uscita del comparatore rimane bassa; non appena la tensione a rampa supera Vi il comparatore
commuta azzerando il flip-flop RS. In tal modo la porta AND viene bloccata e il conteggio degli
impulsi di clock interrotto. E' facile rendersi conto che, in condizioni ideali, il numero memorizzato
nel contatore e' proporzionale alla tensione di ingresso.
Il diagramma di temporizzazione dei segnali nei vari punti del circuito e' riportato in fig. 6.44.
comando di
conversione
t
V
R max
Vi
VR
t
Q
t
S
t
fig.6.44
Le prestazioni di un tal tipo di convertitore sono generalmente superiori a quelle dei
convertitori V-F; la linearita' e la precisione dipendono ovviamente dall'accuratezza con cui viene
realizzato il generatore di rampa e dalla stabilita' della base dei tempi. Nel complesso tuttavia le
prestazioni rimangono modeste.
Gli errori che maggiormente fanno sentire il loro effetto sono dovuti a fenomeni di non
linearita' della tensione a rampa, alle incertezze nelle soglie del comparatore e ai ritardi da esso
introdotti. C'e' inoltre da notare che vi e' un'elevata sensibilita' a disturbi e rumori provenienti sia
dalla rete di alimentazione sia sovrapposti alla tensione da convertire.
c) Convertitore A/D a doppia rampa.
Prestazioni nettamente superiori a quelle dei sistemi presi fin qui in considerazione si possono
ottenere con il convertitore A/D a doppia rampa, il cui schema di principio e' riportato in fig. 6.45.
La tensione Vi da convertire viene applicata per un intervallo di tempo costante T0,
determinato da una rete sequenziatrice in base alla frequenza di clock, ad un integratore. La tensione
all'uscita dell'integratore alla fine dell'intervallo sara':
T0
V1 = ∫ Vi (t ).dt
0
e se Vi e' costante si ottiene:
260
Capitolo VI
Conversione A/D e D/A
V1 =
1
. Vi . T0
R. C
Clock
Vi
VR
T0
C
T2
Fc
R
V1
Contatore
Comp.
T1
reset
Fc
T2
T0
T1
Rete
sequenziatrice
T2
fig. 6.45
Al termine dell'intervallo T0 la tensione Vi viene sconnessa e l'ingresso dell'integratore viene
collegato a una tensione di riferimento costante -VR di polarita' opposta a quella della tensione Vi,
che integrata da' origine ad una rampa decrescente. Durante questo secondo intervallo di tempo (T2)
la porta AND risulta abilitata e gli impulsi di clock possono raggiungere il contatore. Questa fase si
interrompe non appena l'uscita dell'integratore raggiunge lo zero, condizione riconosciuta tramite il
comparatore. A questo punto la porta AND viene bloccata, l'informazione viene trasmessa al
circuito sequenziatore che provvede ad avviare un nuovo ciclo di conversione dopo un opportuno
intervallo di tempo T1.
Esiste pertanto una proporzionalita' diretta tra la tensione da convertire e il numero di impulsi
conteggiati. Infatti alla fine del periodo T2 e' soddisfatta la condizione:
V1 −
1
. VR . T2 = 0
R. C
e ricordando l'espressione ricavata per V1 si ottiene infine:
V
T2 = T0 . i
VR
Il numero di impulsi conteggiati e' pertanto:
N = T2 . Fc = T0 . Fc .
Vi
VR
E' opportuno osservare che l'intervallo di tempo T0 viene ottenuto conteggiando un certo
numero N0 di impulsi di clock. Di conseguenza:
T0 =
N0
Fc
261
Capitolo VI
Conversione A/D e D/A
che permette finalmente di ricavare l'espressione finale:
Vi =
VR
.N
N0
Questo tipo di convertitore possiede una linearita' e una precisione nettamente superiore a
quella dei tipi precedentemente presi in esame. Il suo pregio piu' importante risiede nel fatto che il
conteggio risulta indipendente sia dalla stabilita' del clock che da quella dei componenti della rete di
integrazione. E' sufficiente infatti, affinche' la relazione appena ricavata sia valida, che la frequenza
del clock e le caratteristiche dell'integratore rimangano stabili durante il tempo di conversione,
specifica questa abbastanza facile da soddisfare. Anche le incertezze introdotte dal comparatore di
zero si possono ritenere scarsamente influenti in quanto si ripercuotono alla stessa maniera sia
durante la rampa ascendente che durante la rampa discendente.
A tutto cio' si aggiunge il fatto che l'operazione di integrazione permette di ridurre l'effetto dei
disturbi impulsivi e che tutti i rumori a valor medio nullo, quali ad esempio il rumore di rete, il cui
periodo sia un sottomultiplo del periodo di integrazione, vengono totalmente cancellati.
Unica caratteristica negativa, peraltro comune ai convertitori fin qui presi in esame, e' la
lentezza dell'operazione di conversione, che non permette pertanto di trattare segnali di ingresso di
frequenza elevata.
d) Convertitore A/D a rampa multipla.
Convertitori A/D, il cui principio di funzionamento e' simile a quello del convertitore a doppia
rampa, sono quelli a rampa multipla, che nei confronti di quello a doppia rampa presentano una
serie di vantaggi. In particolare hanno, con un'opportuna scelta della frequenza di clock, una
maggior stabilita' e precisione, una maggiore rapidita' di conversione ed infine offrono un maggior
potere filtrante nei confronti di rumori e disturbi.
Per illustrarne il principio di funzionamento si fara' riferimento a quello a tripla rampa, le cui
forme d'onda principale sono riportate in fig. 6.46.
uscita
dell'integratore
t
intervallo
di conteggio
t
fig. 6.46
La tensione di ingresso Vi viene integrata per un intervallo di tempo costante T0 al termine del
quale all'ingresso dell'integratore viene applicata la tensione costante di riferimento -VR, che scarica
il condensatore dell'integratore in modo del tutto analogo a quanto avviene nel convertitore a doppia
262
Capitolo VI
Conversione A/D e D/A
rampa. La differenza con quest'ultimo risiede nel fatto che la scarica a corrente costante non si
arresta quando la tensione di uscita dell'integratore ha raggiunto lo zero, ma prosegue, diventando
negativa, fino all'istante di arrivo del successivo impulso di clock. In questo istante, quando l'uscita
dell'integratore e' negativa, viene applicata all'ingresso una tensione fissa dello stesso segno di Vi
pari a VR/10.
In tal modo l'uscita dell'integratore tornera' a salire con una pendenza pari a un decimo di
quella precedente. Il conteggio si arresta quando l'uscita dell'integratore raggiunge lo zero.
A parte qualche lieve complicazione nella codifica del dato digitale di uscita, si puo' notare
che in virtu' dei due tratti a pendenza diversa si ottengono, a parita' di frequenza di clock, risoluzioni
nettamente superiori a quelle del convertitore a doppia rampa. Ad esempio con 20 impulsi di clock,
10 per il tratto a pendenza negativa e 10 per il tratto a pendenza positiva, si ottiene una risoluzione
pari a una parte su 100, che nel caso di un convertitore a doppia rampa richiederebbe 100 impulsi di
clock. Da un altro punto di vista si puo' affermare che il convertitore a doppia rampa a parita' di
frequenza di clock impiegherebbe per ottenere la medesima risoluzione un tempo cinque volte superiore.
6.7.2) Convertitori a controreazione.
Si consideri la semplice struttura circuitale illustrata in figura 6.47. Si abbia cioe’ un
convertitore D/A (realizzato nel caso in esame con una rete a scala) la cui uscita piloti una
giunzione a somma nulla.
I 1A
V
1A
R
Comparatore analogico
2R
b1
R
2R
+VR
giunzione somma
b2
R
2R
bn
2R
Logica
di controllo
fig. 6.47
La tensione alla giunzione somma sara’ ovviamente nulla quando:
I1A = I1 b1 + I 2 b 2 + ..... + I n b n
dove la generica Ii e’ il contributo fornito alla giunzione somma attraverso il ramo i dal generatore
di riferimento VR. Si ricordi che:
I i+1 =
Ii
2
i = 1,2,...., n − 1
263
Capitolo VI
Conversione A/D e D/A
Questa semplice osservazione permette di individuare una tecnica atta ad effettuare la
conversione analogico-digitale. Si supponga infatti che una logica programmata applichi al
convertitore D/A parole digitali di diverso valore secondo un'opportuna politica (per incrementi
successivi unitari, per approssimazioni successive, secondo una ricerca binaria. etc.). Solo quando la
tensione alla giunzione somma sara' scesa al di sotto di un'opportuna soglia, pari alla tensione
fornita dal bit meno significativo, l'operazione verra' interrotta. La parola binaria cosi' realizzata
sara' l'equivalente digitale della tensione V1A.
Per esaminare quantitativamente questo modo di operare si supponga che sia a 1 il bit piu'
significativo, mentre tutti gli altri siano a 0. La corrente fornita alla giunzione somma e' allora:
I1 =
VR
2R
Se invece e' il secondo bit ad assumere il valore 1 si ottiene, ricordando che l'impedenza
d'uscita di una rete a scala R/2R vale R e che la tensione di uscita a vuoto nelle condizioni ipotizzate
e' VR/4:
I2 =
VR
4R
In definitiva all'equilibrio si avra':
I1A =
V1A VR
V
V
. b1 + R . b 2 + ...... + Rn . b n
=
R
2. R
4. R
2
cioe’
b
b b
V1A = VR . 1 + 2 + ..... + nn
2
2 4
b .2
= VR . 1
n −1
+ b 2 .2 n −2 + ..... + b n .2 0
B
= VR . n
n
2
2
dove con B si e’ indicato il valore rappresentato dalla parola binaria in ingresso al convertitore D/A.
In definitiva si ottiene :
B=
V1A n
.2
VR
All’equilibrio quindi la parola binaria B rappresenta, nei limiti dell’errore di quantizzazione,
la misura della tensione di ingresso V1A.
Nella pratica un convertitore A/D in controreazione si ottiene inserendo un convertitore D/A
nell’anello di reazione di un amplificatore operazionale utilizzato come comparatore, come
illustrato in figura 6.48
264
Capitolo VI
Conversione A/D e D/A
Vi
Comparatore analogico
+
Convertitore
VR
-
D/A
parola digitale d'uscita
Logica
di controllo
fig. 6.48
Il convertitore D/A puo' essere di diverso tipo, anche se e' abbastanza comune che venga
impiegato quello con rete a scala.
La logica di controllo determina poi le modalita’ operative del convertitore A/D, permettendo
di ottenere piu’ o meno rapidamente il dato convertito. In sostanza le diverse modalita’ operative
influiscono solo sulla velocita’ di conversione e non sulla risoluzione e sulla precisione del
convertitore. Queste ultime risultano determinate unicamente dalla struttura e dalle caratteristiche
del convertitore D/A inserito nell’anello di reazione.
La modalita' operativa piu' semplice e' quella che prevede l'incremento della parola digitale di
un'unita' per periodo di clock. Ovviamente un tal modo di procedere fa si' che la logica di controllo
sia particolarmente semplice, ma contemporaneamente costringe ad adottare tempi di conversione
lunghi, rendendo il convertitore poco adatto alla conversione di segnali variabili nel tempo. Un
convertitore A/D di tal tipo viene detto ad inseguimento.
Una maggiore efficienza si ottiene con la politica di controllo a successive approssimazioni, in
cui la tensione convertita e' ottenuta con successive fasi di tentativo e correzione a partire dal bit piu'
significativo della parola digitale.
In sostanza viene effettuata una ricerca dicotomica del risultato ponendo inizialmente a 1 il bit
piu' significativo e osservando se la tensione ottenuta e' superiore o inferiore a quella di ingresso. In
base al risultato di questo confronto la logica di controllo decide poi se mantenere a 1 tale bit o
azzerarlo, ripetendo poi la stessa operazione per tutti i successivi bit fino ad ottenere in uscita il dato
che meglio approssima la tensione di ingresso.
La tecnica a successive approssimazioni consente di accelerare in modo considerevole le
operazioni di conversione. Infatti, nella tecnica a inseguimento il tempo massimo necessario alla
conversione e' 2n.T, se T e' il periodo di clock e n il numero di bit del convertitore, mentre nella
tecnica a successive approssimazioni il tempo necessario e', in prima approssimazione, solamente
n.T.
6.7.3) Convertitori veloci (flash).
Si definiscono convertitori veloci (flash) quelli in grado di convertire segnali analogici
occupanti una banda dell’ordine della decina o addirittura del centinaio di MHz. La loro caratteristica piu' importante e' il tempo di conversione definito come l'intervallo di tempo che intercorre tra
l'istante in cui viene applicato il comando di inizio della conversione stessa e quello in cui il dato in
uscita puo' essere considerato valido.
La struttura di questo tipo di convertitori e' totalmente diversa di quella dei convertitori fin qui
presi in esame. In genere il cuore di un sistema di conversione veloce e' costituito da un insieme di
265
Capitolo VI
Conversione A/D e D/A
comparatori, ciascuno con una precisa e prefissata tensione di soglia. Le uscite di tali comparatori
vengono poi inviate ad un opportuno sistema di codifica che realizza la parola digitale di uscita
secondo lo schema di principio di fig. 6.49.
La velocita di questo tipo di convertitore e' limitata solamente dal tempo di assestamento dei
comparatori e dalla velocita della rete di codifica. La limitazione maggiore risiede nel gran numero
di resistori da utilizzare, che nel caso di un'uscita a n bit e pari a 2n, e nel gran numero di
comparatori necessario, pari a 2n-1. Ogni bit in piu' pertanto porta al raddoppio del numero di
resistenze e comparatori necessari. Per tale motivo i convertitori veloci realizzati secondo questo
principio non hanno in genere un numero di bit superiore a 6.
Strutture piu' complesse, ottenute da gruppi di comparatori multi soglia opportunamente
raggruppati tra di loro, permettono di realizzare sistemi di conversione A/D veloci fino a 8 ÷ 10 bit.
VR
V
R
Rete combinatoria
di
codifica
R
uscita digitale
R
fig. 6.49
R
6.8) Cenni sul dimensionamento di sistemi d’acquisizione e conversione A/D.
Dopo aver preso nei paragrafi precedenti in considerazione alcuni aspetti relativi alla
conversione D/A e A/D si esamini ora un sistema completo, illustrato schematicamente nella figura
6.50.
segnale
analogico
Circuiti di
protezione
Amplificatore/
Attenuatore
Convertitore
A/D
Filtro PB
antialiasing
Convertitore
D/A
S/H
Filtro PB
Protezioni
e
Amplificatore
segnale
analogico
segnale digitale
figura 6.50
Ovviamente nei casi reali alcuni dei blocchi rappresentati in figura potrebbero mancare. Se, ad
esempio, non si avesse interesse a riottenere un segnale analogico in uscita, il convertitore D/A, il
filtro passa-basso d’uscita, le protezioni e l’eventuale amplificatore non sarebbero presenti.
266
Capitolo VI
Conversione A/D e D/A
I punti su cui fissare l’attenzione ai fini del dimensionamento possono essere riassunti in:
•
•
•
•
Precisione e risoluzione, determinate dal numero di bit della parola di uscita;
Banda del segnale, che determina la frequenza di campionamento;
Dinamica del segnale di ingresso, che ha una diretta influenza sugli stadi
amplificatori/attenuatori;
Numero di canali del sistema, che permette di valutare il tempo massimo di conversione
del convertitore A/D.
L’ultima parametro preso in esame si riferisce alla possibilita’ di eseguire la conversione A/D
su piu’ segnali utilizzando un unico convertitore A/D. Tale operazione puo’ venir effettuata se nella
catena di conversione di figura 6.50 viene inserito un multiplexer (analogico) immediatamente
prima del blocco sample-hold, permettendo di scandire ciclicamente i vari segnali di ingresso. E’
evidente tuttavia che, se in un sistema monocanale il periodo minimo di campionamento e’
determinato dalla somma del tempo di acquisizione Ta del sample-hold e del tempo di conversione
Tconv del convertitore A/D, cioe’:
Tc min = Ta + Tconv
in un sistema multicanale con N ingressi il periodo minimo di campionamento del singolo canale
sara’:
Tc min = N.(Ta + Tconv )
Se, ad esempio, il sistema fosse in grado di eseguire 104 campionamenti al secondo, con un
unico canale il periodo di campionamento sarebbe di 10-4 secondi. In altre parole, tenendo presente
che la frequenza di campionamento deve essere almeno doppia della massima frequenza contenuta
nel segnale, si sarebbe in grado di convertire segnali con frequenza massima di 5 kHz.
Se viceversa i segnali di ingresso fossero invece 10, il periodo minimo di campionamento del
singolo segnale passerebbe a 10-3 secondi, consentendo la conversione A/D di segnali di frequenza
massima pari a 500 Hz.
L’aumento del numero di canali pone quindi, a parita’ delle altre caratteristiche, un vincolo
sulla massima frequenza del segnale convertibile. Quanto piu’ aumenta il numero di canali, tanto
piu’ risulta limitata la banda di ciascun segnale convertibile.
Con riferimento allo schema di massima di figura 6.50 i primi tre blocchi, cioe’ quelli di
protezione, di amplificazione/attenuazione e il filtro passa-basso antialiasing, effettuano
l’operazione che complessivamente viene detta condizionamento del segnale. E’ necessario cioe’:
•
•
•
Limitare l’ampiezza del segnale a valori tali da garantire l’integrita’ del sistema;
Amplificare o attenuare il segnale in modo che il suo valore massimo sia adattato al fondo
scala del convertitore. Ci si rende infatti conto che se, ad esempio, si applicasse ad un
convertitore A/D con fondo scala di 10 V un segnale di ampiezza massima 0,5 V, non si
sfrutterebbe convenientemente il convertitore stesso. Alcuni bit della parola digitale di
uscita, per la precisione quelli piu’ significativi, rimarrebbero costantemente a zero;
Limitare la banda del segnale al piu’ alla meta’ della frequenza di campionamento.
267
Capitolo VI
Conversione A/D e D/A
I circuiti di protezione possono venir realizzati utilizzando dispositivi di tosatura, che
utilizzano diodi o zener, come illustrato in figura 6.51.
+V
V in
Vin
Vout
V out
-V
figura 6.51
Nel caso (a) la tensione del segnale d’uscita viene mantenuta approssimativamente all’interno
dell’intervallo compreso tra +V e –V, nel caso (b) tra Vz e –Vz.
Un risultato analogo si puo’ ottenere utilizzando varistori, cioe’ resistenze non lineari, che,
com’e’ noto, diminuiscono di valore all’aumentare della tensione applicata.
Gli stadi amplificatori/attenuatori vengono di solito realizzati con amplificatori differenziali,
in modo da ridurre, per quanto possibili, gli effetti dei rumori di modo comune. Molto spesso la
configurazione adottata e’ quella dell’amplificatore per strumentazione 3OP, che, oltre a presentare
ottime caratteristiche di reiezione di modo comune, permette di variare il guadagno agendo su
un’unica resistenza. Spesso inoltre il guadagno puo’ venire programmato con un’opportuna parola
digitale di controllo, come si e’ visto al paragrafo 6.4.3.
Infine il filtro antialiasing e’ semplicemente un filtro passa-basso. Considerazioni anche
banali, basate su quanto esposto al paragrafo 6.2, relativo allo spettro dei segnali campionati,
permettono di affermare che la ripidita’ del filtro dovra’ essere tanto maggiore quanto piu’ la
massima frequenza contenuta nel segnale da convertire si avvicina alla frequenza di Nyquist, cioe’
alla meta’ della frequenza di campionamento1.
Il filtro va ovviamente inserito a monte dell’eventuale multiplexer. In uscita del multiplexer,
infatti, si ha un segnale composito che deriva dalla commutazione ciclica sui vari canali d’ingresso.
Il suo contenuto frequenziale e’ quindi diverso da quello dei singoli segnali.
Che questa affermazione corrisponda a realta’ e’ facilmente intuibile facendo riferimento al
seguente semplice esempio. Si consideri infatti un sistema a due canali ai cui ingressi siano presenti
due tensioni continue di valore diverso, come illustrato in figura 6.52.
1
Per semplificare il filtro e’ conveniente sovracampionare, cioe’ adottare una frequenza di campionamento
notevolmente superiore al doppio della massima frequenza contenuta nel segnale. E’ abbastanza usuale avere fattori di
sovracampionamento che possono giungere anche a 100.
268
Capitolo VI
Conversione A/D e D/A
V1
t
V2
t
V1
MUX
Vo
Vo
t
V2
tc
2t c 3tc 4tc 5t c 6tc 7tc
figura 6.52
Il segnale Vo in uscita del multiplexer sara’ un’onda rettangolare, che ad ogni istante di
campionamento commuta tra i due valori V1 e V2. Si passa cioe’ da un segnale in continua (e quindi
con componenti spettrali unicamente a frequenza nulla) ad un segnale che contiene anche le righe
spettrali Fc = 1/tc e tutte le sue armoniche dispari. Non e’ quindi possibile eseguire il filtraggio
antialiasing a valle del multiplexer, ma e’ obbligatorio realizzarlo a monte utilizzando tanti filtri
quanti sono i canali di ingresso.
Per quanto attiene il multiplexer esso ha il compito di connettere uno degli ingressi alla linea
di uscita. Di solito la selezione viene effettuata attraverso un certo numero N di bit, detti bit di
indirizzo, che permettono di scegliere la linea di ingresso desiderata. Essi vengono realizzati
utilizzando un banco di interruttori, capaci di commutare segnali analogici, e con una logica di
decodifica degli indirizzi che aziona il singolo interruttore. Spesso all’interno del multiplexer sono
presenti anche circuiti di protezione.
Parametri caratterizzanti un multiplexer sono:
•
•
•
•
•
Numero di canali
Dinamica consentita ai segnali di ingresso
Isolamento tra i canali
Caratteristiche statiche degli interruttori
Caratteristiche dinamiche
In particolare, con riferimento alle caratteristiche statiche, una notevole importanza assume la
resistenza a interruttore chiuso Ron, che per i componenti disponibili comunemente e’ compresa tra
qualche decina e qualche centinaio di ohm. Tale resistenza e’ comunque definita sull’intera
dinamica ammessa per l’ingresso.
Analoga importanza riveste la corrente di perdita Is di un interruttore aperto. A seconda del
tipo di interruttore questa corrente puo’ variare, ma e’ comunque molto piccola. Per interruttori
realizzati in tecnologia MOS e’ dell’ordine del nanoampere o meno.
Tra i parametri dinamici si possono citare i tempi di apertura e di chiusura degli interruttori,
che, essendo elementi fisici e non ideali, hanno dei tempi di azionamento che, per quanto piccoli,
non possono certamente essere nulli.
Questi parametri, assieme alle capacita’ parassite, inevitabilmente presenti, permettono di
valutare gli errori introdotti dagli interruttori.
Gli interruttori analogici possono essere realizzati utilizzando ponti di diodi, transistori
bipolari, transistori ad effetto di campo o altri dispositivi, quali ad esempio fotodiodi o
fotoresistenze. In figura 6.53 sono riportate, senza alcuna pretesa di completezza, alcune strutture
circuitali tipiche che realizzano interruttori analogici.
269
Capitolo VI
Conversione A/D e D/A
-5
VR
Vc
+10
+5V
0
VR
V0
+15V
+5
+V
VR
V0
-V
Vc
Vc
0
0
+5
-15
+12
Interruttore serie (npn)
+5
VR
-10
V
+5
-5
-15
-12
Interruttore serie con
pilotaggio a corrente costante
Interruttore parallelo
a singolo transistore
V
V0
+5
+5
VR
+15
+10
V0
-10
-15
V0
+15
0
c
V
0
-10
+5
Interruttore serie (pnp)
VR
-15
Vc
-10
Interruttore serie a NFET
di media velocita'
Interruttore serie-parallelo
+12
VR1
Vc
VR2
+10
+5
+12
V01
0
V02
+5
VR
Vc
VR2
V0
-10
Vc
-24
+15
0
-12
VR1 V0
+5
-20
Interruttore serie-parallelo
a NFET di media velocita'
Interruttore serie
a MOS
Interruttore serie-parallelo
a MOS
fig. 6.53
Un’importante classificazione degli interruttori permette di raggrupparli in due categorie,
quella in cui uno degli elettrodi dell'elemento di commutazione e' connesso al potenziale di
riferimento e quella degli interruttori “floating”. Un esempio dei primi e’ rappresentato dal circuito
di figura 6.53 (b). E’ abbastanza evidente che in questo caso il pilotaggio dell’interruttore e’
particolarmente semplice; e’, infatti, sufficiente polarizzare adeguatamente la base rispetto
all’emettitore, che e’ connesso a massa, per ottenere la commutazione del transistore. Piu’ difficile
risulta la commutazione di un interruttore “floating”.
Si consideri, ad esempio, l’interruttore MOS di figura 6.54.
Vi
D
S
G
Vc
figura 6.54
270
Vo
Capitolo VI
Conversione A/D e D/A
Avendo scelto per la realizzazione un MOS ad arricchimento, per portarlo in conduzione e’
necessario applicare tra gate e source una tensione di comando superiore alla tensione di soglia VT.
Poiche’ tuttavia la tensione d’uscita Vo non e’ costante, anche la tensione di comando Vc non puo’
essere resa costante, ma deve essere tale che, istante per istante, sia rispettata la relazione:
Vc − Vo ≥ VT
Un possibile arrangiamento circuitale che soddisfa queste specifiche e’ quello che fa ricorso
ad un generatore di corrente comandato, come mostrato in figura 6.55.
In questo circuito e’ sufficiente che, indipendentemente dalla tensione Vo, R i .I c > VT per
mantenere in conduzione il MOS.
Vi
Vo
R
Ic
figura 6.55
C’e’ da notare infine che le capacita’ parassite giocano un ruolo fondamentale sugli errori di
commutazione. Si consideri, infatti, un interruttore MOS “floating”, quale quello di figura 6.56, in
cui siano state evidenziate le capacita’ parassite drain-source CDS, gate-source CGS e gate-drain
CGD.
C DS
Vi
D
S
Vo
C
G
C GD
Vc
C GS
figura 6.56
Per semplicita’ si consideri poi l’interruttore chiuso su un carico capacitivo C, situazione che
molto spesso corrisponde alla realta’.
Si supponga ora che al gate venga applicato un gradino di comando. Poiche’ le due capacita’
CGD e C formano un partitore capacitivo, una frazione della tensione di comando verra’ riportata in
uscita, determinando quello che viene chiamato errore di piedistallo. Indicando con Vc la tensione
di comando, si avra’ in uscita una tensione pari a:
271
Capitolo VI
Conversione A/D e D/A
Vo = Vc .
C GD
C GD + C
La capacita’ CDS determina poi un errore detto “errore di feed-trough”. Infatti, anche
quando il MOS e’ in condizione OFF, una parte del segnale d’ingresso Vi viene riportata in uscita
poiche’ anche in questo caso CDS e C formano un partitore capacitivo. Si ha in tal caso:
Vo = Vi .
C DS
C DS + C
Si nota immediatamente che, in ambedue i casi, un aumento di C gioca un ruolo favorevole
poiché fa diminuire l’errore complessivo. Tuttavia l’aumento di C ha tutta una serie di
controindicazioni. Ad esempio la velocita’ operativa dell’interruttore in fase di chiusura viene
diminuita poiche’ il condensatore C si carica con una costante di tempo pari a Ron.C.
L’errore di piedistallo puo’ invece venir compensato utilizzando per realizzare l’interruttore
due MOS complementari anziche’ uno solo, secondo lo schema di figura 6.57.
Vi
Vo
Vc
figura 6.57
In questo modo le cariche fornite all’uscita attraverso le capacita’ parassite si bilanciano tanto
piu’ quanto le caratteristiche dei due MOS coincidono.
6.9) Gli interruttori per segnali analogici.
Ciascun tipo di "switch" analogico ha i suoi vantaggi e le sue limitazioni, che ne determinano
il campo d’impiego. Nessun interruttore infatti e' perfetto. Per essere tale esso dovrebbe avere una
resistenza nulla nello stato ON, infinita in quello OFF ed avere un'efficienza del 100%, cioe' non
dissipare potenza.
Dal punto di vista delle caratteristiche elettriche gli interruttori meccanici sono quelli che piu'
d’ogni altro si avvicinano a questa condizione ideale, in quanto hanno il piu' alto rapporto
ROFF/RON ed isolano totalmente il segnale dalla funzione di controllo della commutazione.
Tuttavia la loro realizzazione meccanica fa si' che si generino rumori e instabilita' nelle
commutazioni a basso livello, con rimbalzo dei contatti, avvelenamento degli stessi e suscettibilita'
alle vibrazioni. Inoltre, la necessita' di spostare una massa fisica per dar luogo alla commutazione
impedisce operazioni ad alta velocita' e da' di regola luogo ad una maggior dissipazione di potenza
che non con gli interruttori allo stato solido.
I transistori bipolari permettono di realizzare degli eccellenti interruttori per segnali digitali,
ma si rivelano molto carenti nelle applicazioni di commutazione con segnali analogici a basso
272
Capitolo VI
Conversione A/D e D/A
livello. I loro principali svantaggi risiedono nella presenza di tensioni di offset ineliminabili e
nell'impossibilita' di isolare il segnale analogico da commutare dai segnali di controllo della
commutazione. Inoltre nella commutazione di segnali analogici si rivelano relativamente lenti, ad
esempio rispetto a interruttori realizzati con JFET.
La resistenza di conduzione RON degli interruttori realizzati con BJT e' bassa e risulta
compresa tra un massimo di qualche diecina di ohm per i normali transistori di bassa potenza fino a
qualche milliohm per i transistori di potenza piu’ elevata. A causa delle loro caratteristiche essi
vengono quindi utilizzati quasi esclusivamente nelle applicazioni ad alto livello, dove gli offset in
corrente continua assumono un'importanza trascurabile.
Sotto certi aspetti dispositivi particolarmente adatti alla realizzazione di interruttori analogici
sono i dispositivi fotosensibili; poiche' utilizzano quali segnali di controllo la luce, essi permettono
infatti un isolamento completo tra segnale di comando e circuito di segnale.
Fissando l'attenzione sulle fotocelle e sulle fotoresistenze si puo' dire tuttavia che la loro RON
e' relativamente alta e il rapporto ROFF/RON non e' molto buono. A cio' si aggiunge che, anche
accettando bassi valori per tale rapporto, raramente si riescono a superare frequenze di
commutazione al di sopra del centinaio di Hz. Se come elementi fotosensibili si utilizzano materiali
semiconduttori quali il solfuro o il seleniuro di cadmio, si ha, infatti, una notevole inerzia nel
raggiungere lo stato OFF dopo l'esposizione ad un'illuminazione intensa (in qualche caso possono
passare diversi secondi prima che la ROFF raggiunga valori accettabili).
Switch fotoelettrici piu' rapidi possono essere realizzati con la combinazione di LED e
fototransistori o fotodiodi, ma in tal caso l'inconveniente principale e' il costo.
Un comportamento molto migliore viene presentato dai JFET. Essi non presentano tensioni di
offset, e il rapporto tra ammettenza e capacita' di ingresso e' il migliore tra quelli dei dispositivi
comunemente disponibili. Questi due parametri hanno un'importanza fondamentale per la velocita'
di commutazione e nel caso dei JFET, quando anche le sorgenti di segnale hanno un'impedenza
interna molto bassa, la velocita' che si raggiunge puo' essere veramente notevole. Per fissare le idee
si puo' affermare che un JFET a canale N, quale ad esempio il 2N4391, ha un rapporto ROFF/RON
di circa 109, una resistenza di conduzione che si aggira sulla trentina di ohm e una massima corrente
di perdita a 25°C, che non supera i 100 pA. E' bene ricordare che i JFET a canale P presentano
caratteristiche di velocita' inferiori rispetto a quelli a canale N a causa della minor mobilita' dei loro
portatori di carica maggioritari (lacune) rispetto ai portatori dei JFET a canale N (elettroni).
Il maggior inconveniente dei JFET risiede nell'estrema difficolta' che si ha nel realizzare
dispositivi multicanale in tecnica integrata.
I dispositivi che oggigiorno maggiormente si prestano alla commutazione a bassa potenza,
soprattutto quando l'ampiezza dei relativi segnali non sia eccessiva, sono i MOS, che permettono la
realizzazione di diversi canali di commutazione sullo stesso substrato, con eccellenti caratteristiche.
In aggiunta anche tutti i circuiti di controllo della commutazione possono essere integrati nello
stesso chip.
I MOS presentano dal punto di vista elettrico diversi significativi vantaggi:
•
•
•
•
La dissipazione di potenza e' praticamente nulla nella maggior parte delle
applicazioni. Infatti non vi e' potenza dissipata nei circuiti di gate e la stessa potenza
dissipata nello switch, quando questo si trova nella condizione ON, e' di solito
trascurabile.
La tensione di offset in un commutatore ben progettato e' nulla.
La resistenza ON e' ragionevolmente bassa ( al massimo di qualche centinaio di
ohm).
La resistenza OFF e' praticamente infinita (tipicamente > 1012 ohm) e le correnti di
perdita sono molto piccole (dell'ordine dei 100 pA).
273
Capitolo VI
Conversione A/D e D/A
•
I segnali analogici sono altamente isolati dal circuito di controllo della
commutazione.
6.9.1) Struttura di un interruttore MOS.
Si consideri a titolo di esempio la struttura di in commutatore formato da due switch, di cui
uno puo' essere in condizioni ON e l'altro in condizioni OFF, come illustrato in fig. 6.58.
Ambedue i MOS hanno un substrato comune, realizzato in silicio debolmente drogato N. Uno
strato di biossido di silicio, accresciuto termicamente in tecnica epitassiale, copre completamente
l'intera superficie del chip, tranne nelle zone in cui vengono realizzate le connessioni, garantendo
una buona protezione dei dispositivi e una buona stabilita' delle caratteristiche. Le connessioni
vengono normalmente realizzate in alluminio deposto sotto vuoto.
Ciascun MOS ha elettrodi di gate e di ingresso separati; le uscite invece, a seconda del
dispositivo scelto possono essere separate oppure connesse ad un elettrodo comune. E' interessante
notare che a seconda della metallizzazione finale con la stessa struttura e disposizione dei
dispositivi attivi possono venir realizzati switch individuali, differenziali o multiplexer. I MOS
utilizzati sono di solito a canale P e passano in conduzione quando una tensione negativa viene
applicata tra gate e source, essendo del tipo a rinforzo.
metallo depositato
uscita
gate 2
gate 1
ingresso 2
ingresso 1
P+
P+
P+
P+
N
SiO
substrato
substrato
ingresso 1
gate 1
uscita
ingresso 2
gate 2
figura 6.58
In fig. 6.59 sono riportate le condizioni tipiche di funzionamento di un MOS usato per
commutare segnali analogici compresi tra -10 e +10 V.
274
Capitolo VI
Conversione A/D e D/A
+10 V
substrato
uscita dati
R
S
RL
controllo
+10 V off
-10 V on
ingresso dati
(10 V picco)
tensione di soglia
6
5
4
3
2
1
0
5
10
15
20
tensione
substrato - source
fig. 6.59
In ciascuna condizione operativa e' opportuno che siano rispettate le seguenti condizioni:
•
•
•
La tensione VBB di polarizzazione del substrato deve essere maggiore della
massima tensione positiva del segnale analogico. Poiche' tale polarizzazione deve
essere mantenuta costantemente vi e' bisogno di un'alimentazione in continua.
Per portare l'interruttore nella condizioni ON e mantenere bassa la resistenza di
conduzione RON la tensione applicata al gate deve essere almeno di cinque volt
inferiore della massima escursione negativa del segnale analogico.
Per assicurare la completa apertura dello switch la tensione di gate deve diventare
almeno pari a VBB, rendendo nulla la tensione di polarizzazione di gate VGB.
La prima delle condizioni enunciate dev'essere osservata per ottenere buone prestazioni
dall’interruttore. Si garantisce infatti in tal modo che le giunzioni p-n parassite siano polarizzate
inversamente. Inoltre quando il canale e' OFF questa condizione isola il drain dal source garantendo
resistenze di isolamento molto elevate. Quando lo switch e' ON e il canale drain - source si e'
formato e la zona di canale rimane isolata dal substrato da una giunzione p - n in quanto il canale si
trova comunque a tensioni maggiormente positive delle altre zone e si trova quindi polarizzato
inversamente.
Il diagramma di fig. 6.59, che illustra l'andamento qualitativo della tensione di soglia in
funzione della tensione substrato-source, chiarisce invece l'opportunita' di rispettare la seconda e la
terza regola. Si vede infatti che la tensione di soglia gate-source, parametro tipico dei dispositivi
MOS a rinforzo, si modifica la variare della tensione di polarizzazione substrato-source.
E' noto che per creare il canale in modo che la resistenza di conduzione sia di basso valore e'
necessario applicare una tensione di polarizzazione VGS maggiore della tensione di soglia; in caso
contrario la resistenza di canale si manterrebbe di valore elevato e verso l'uscita potrebbe scorrere
solo una corrente di qualche µA.
Per ottenere lo scopo stabilito, nella commutazione ON e' quindi necessario rendere il gate
'
notevolmente piu' negativo della tensione di soglia VTH
determinata dalla massima escursione
negativa del segnale di ingresso.
275
Capitolo VI
Conversione A/D e D/A
Infine nella commutazione OFF la terza regola assicura che la polarizzazione del gate sia piu'
positiva di VTH, garantendo che la zona di canale ritorni nella condizione di silicio di tipo N,
impedendo pertanto che vi possa essere un flusso di portatori maggioritari tra source e drain.
C'e' da osservare tuttavia che le resistenze RON e ROFF variano con la tensione del segnale e
con la temperatura. Un segnale di ingresso positivo infatti fa aumentare la tensione di
polarizzazione VGS favorendo la formazione del canale. La minima resistenza di canale si ha
pertanto in corrispondenza alla massima escursione positiva del segnale di ingresso.
Se tuttavia come carico si sceglie un valore resistivo molto maggiore che non la RON gli
effetti della variazione di quest'ultima diventano trascurabili, sia per quanto riguarda la precisione
dell'uscita, sia per quanto riguarda la distorsione introdotta in presenza di segnali variabili nel
tempo, malgrado che la RON vari in maniera non lineare.
Senza approfondire eccessivamente tale argomento si puo' dire che con un carico dell'ordine
del migliaio di ohm, carico il cui valore puo' essere considerato insolitamente piccolo, la distorsione
introdotta per piccoli segnali e' tipicamente inferiore allo 0.5 %.
Il peggiore valore per la RON si ha ovviamente per segnali d’ingresso pari a -10 V. Se si
desidera minimizzare l'effetto delle variazioni di RON, diminuendone nel contempo il valore, si puo'
pensare di aumentare la polarizzazione negativa del gate. Ad esempio portando la tensione di
controllo ON dai -15 V precedentemente ipotizzati a -25 o -30 Volt. Cio' fa ovviamente aumentare
la polarizzazione gate - substrato, che con una tensione di polarizzazione del substrato VBB= + 10
V, passa dei -25 V precedenti a -35 ÷ -40 V.
E' essenziale che per questa tensione non vengano superati i limiti massimi forniti dal
costruttore. In caso contrario, pur non essendoci immediate ripercussioni sull'integrita' del
dispositivo, vi potrebbe essere una notevole riduzione della sua vita operativa.
Se viceversa i segnali di ingresso dovessero avere escursioni piu' ridotte rispetto ai ± 10 V
precedentemente ipotizzati, tutte le polarizzazioni potrebbero a loro volta essere ridotte.
Se si riduce la tensione ON di gate, tutte le commutazioni diventano piu' rapide e tutti i
fenomeni legati ai transitori di commutazione diventano di minor entita'.
Se invece viene diminuite la polarizzazione del substrato mantenendo inalterata la tensione
ON di gate si hanno effetti positivi sulla formazione del canale e si ottiene una riduzione della
resistenza RON a tutti i livelli del segnale di ingresso.
Quando al gate si applica la VOFF, l'impedenza tra drain e source diventa estremamente alta (≥
1012 ohm), in quanto l'unico contributo alla conduzione e' in sostanza dato dalla corrente di perdita.
Bisogna tuttavia tenere presente che questa corrente cresce molto rapidamente con la temperatura.
Se, ad esempio, si avesse a che fare con un dispositivo in cui la corrente di perdita a 25° C fosse di
100 pA, a 125° C questa corrente puo' raggiungere i 100 µA. Si ha cioe' approssimativamente un
raddoppio della corrente di perdita ogni 10° ÷ 11° C di incremento della temperatura.
A frequenze di segnale molto elevate si puo' poi verificare un altro meccanismo di
conduzione, cioe' la trasmissione di segnale attraverso le capacita' del dispositivo, come e’ gia’ stato
fatto notare in precedenza. Questo fenomeno puo' essere prevenuto o comunque ridotto facendo si'
che l'impedenza di uscita del circuito di pilotaggio del gate sia la piu' bassa possibile in condizioni
di apertura dell’interruttore.
Le due piu' significative forme di perdita in continua sono la perdita di source e drain verso il
substrato e le perdita tra ingresso e uscita attraverso il canale.
E' ovvio che in un multiplexer, quando tutti i canali sono OFF, la perdita totale sara' la somma
delle perdite dei singoli MOS. Il circuito con cui si misurano le perdite nel caso peggiore e' riportato
in fig. 6.60.
276
Capitolo VI
Conversione A/D e D/A
A
-25 V
fig. 6.60
Il terminale al quale viene misurata la corrente di perdita viene polarizzato con un'opportuna
tensione negativa mentre tutti gli altri terminali vengono connessi a massa. Questo collegamento,
(figura 6.60) corrisponde a polarizzare il substrato a + 25 V , applicare a tutti i gate la tensione di 25
V e lavorare con segnali di ingresso a +25 V, condizione questa che si puo' ritenere la peggiore
possibile per quanto riguarda la VGS.
Per quanto riguarda le perdite del canale il circuito di misura e' riportato in fig. 6.61 (a). Con
la tensione di ingresso Vin = +10 V si ha la massima corrente di perdita il cui andamento in
funzione della tensione di ingresso stessa e' riportato in fig. 6.61 (b).
80 pA
+10 V
40 pA
+10 V
Vin
-10 V
Vin
-40 pA
A
-80 pA
(a)
(b)
fig. 6.61
Il progettista di un circuito di commutazione, il cui intento sia quello di ottenere delle ROFF
molto alte in qualsiasi condizione di funzionamento, deve prendere in considerazione la possibilita'
di perdite nelle peggiori condizioni possibili, e non quelle medie che sono considerevolmente
inferiori a quelle del caso peggiore.
Quale prima considerazione e' necessario notare che le correnti di perdita di ciascun
interruttore dipendono dalla tensione e quindi per segnali di ingresso inferiori a 10 V diventano
minori.
In secondo luogo, quando le tensioni di ingresso in alcuni canali sono positive mentre negli
altri sono negative, le perdite tendono a compensarsi, riducendo la corrente totale di perdita in
uscita.
277
Capitolo VI
Conversione A/D e D/A
Infine quando un interruttore si trova in condizioni ON non contribuisce alla corrente di
perdita.
Assumendo che le tensioni di ingresso abbiano una distribuzione probabilistica uniforme tra
+10 e -10 V la perdita totale sara' all'incirca la meta' di quella del caso peggiore.
6.9.2) Conclusioni.
I circuiti di commutazione per segnali analogici di tipo MOS offrono ottime caratteristiche,
soprattutto se integrati. La dissipazione e' praticamente nulla, le capacita' parassite ragionevolmente
basse (dell'ordine dei 10 pF agli ingressi analogici), il rapporto ROFF/RON alto e i segnali di
controllo sono altamente isolati dagli ingressi e dalle uscite.
Per pilotare gli interruttori si possono utilizzare dei convenzionali transistori bipolari e molto
spesso i circuiti di controllo della commutazione sono integrati sullo stesso chip degli interruttori. In
tal caso l'utilizzo di circuiti di spostamento del livello di tensione associato alle costanti logiche
permette di avere come segnali di comando delle tensioni TTL o DTL compatibili. Se la
realizzazione e' del tipo multiplexer, anche i circuiti atti ad effettuare la scansione degli ingressi
sono integrati sul chip.
Le frequenze di commutazione raggiungono l'ordine dei MHz.
E' opportuno tuttavia notare che i commutatori MOS sono particolarmente adatti alla
commutazione di segnali a bassa frequenza. Nelle applicazioni ad alta frequenza, segnatamente nel
campo delle VHF, e' usuale rivolgersi a commutatori realizzati con JFET a canale N.
TABELLA COMPARATIVA DEI VARI TIPI DI SWITCH
Meccanici
Resistenza ON
10
-6
ohm
BJT
Fotocelle
JFET
MOS
10 ohm
1 kohm
30 ohm
100 ohm
100 pA
10 nA
100 pA
100 pA
-2
0
0
0
Corrente di
perdita
Tensione di offset
Velocita' di
commutazione
10 pA
0
10
V
50 MHz
1 kHz
100 kHz
100 Hz
o piu'
10 MHz
6.10) I convertitori a rapporto.
Da quanto si e’ visto fino a questo momento risulta evidente che i componenti utilizzati in un
sistema di conversione A/D introducono tutta una serie di errori di misura che influiscono sulla
precisione di conversione. In particolare un’estrema importanza assumono la precisione e la
stabilita’ delle tensioni di riferimento del convertitore A/D vero e proprio. L’uscita digitale di
278
Capitolo VI
Conversione A/D e D/A
qualsiasi convertitore risulta infatti inversamente proporzionale alla tensione di riferimento VR.
Indicando allora con A la grandezza analogica da convertire, l’uscita digitale D sara proporzionale
al rapporto tra A e VR.
A
D≈
VR
Qualsiasi variazione di VR provoca pertanto una variazione del dato digitale D, anche nel caso
in cui A rimanga perfettamente costante.
Se tuttavia la grandezza A e’ fornita da un sensore che richiede esso stesso una tensione di
riferimento VR' si puo’ ricorrere alla tecnica della conversione raziometrica o a rapporto, che rende
il dato D indipendente dal riferimento VR. L’uscita del sensore, infatti, e’ in questo caso
proporzionale a VR'
A = k.VR'
e se si usa la stessa tensione di riferimento sia per il sensore che per il convertitore A/D, facendo si’
che VR = VR' , allora l’uscita D diviene indipendente da VR, svincolando pertanto la precisione del
sistema dalla precisione e dalla stabilita’ della tensione di riferimento.
279