Università degli Studi di Udine
Facoltà di Medicina e Chirurgia
Corso di Laurea in Infermieristica
Sede di Mestre
Corso Integrato
Basi funzionali del corpo umano
Disciplina: FISICA APPLICATA
Docente: Alessandro Culatti Zilli
Liceo «XXV Aprile»
di Portogruaro
Bibliografia:
Fotocopie delle presentazioni del docente
Fazio M., Tosi G., Eulisse G., Pertosa M, Fondamenti di Fisica e Biofisica, Ed.
Sorbona, Milano 1990
Cromer A. H., Fisica per Medicina – Farmacia e Biologia, Ed. Piccin, Padova 1980
Altri testi:
Zingoni E., Tognazzi F., Zingoni A., Fisica Bio-Medica, Ed. Zanichelli, Bologna
1998
Burns D.M., MacDonald S.G.G., Fisica per studenti di Biologia e Medicina, Ed.
Zanichelli, Bologna 1986
Duncan G., Fisica per Scienze Biomediche, Ed. ambrosiana, Milano 1994
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
COS’È LA SCIENZA?
Insieme delle conoscenze, ordinate e coerenti, organizzate logicamente e
ottenute con metodologie rigorose, fondate sull’osservazione, la misurazione
ed il calcolo.
COS’È LA FISICA?
In origine la parola, coniata dal greco Aristotele, indicava il complesso delle
scienze che si occupavano dei fenomeni naturali.
Oggi i confini della fisica sono più limitati, escludendo tutti i fenomeni che
riguardano la materia vivente e le trasformazioni della materia che sono
oggetto di altre scienze.
L’indagine fisica della natura si fonda sulla sperimentazione e sulla
misurazione delle grandezze fisiche, cioè di tutto ciò che, nei vari fenomeni,
può essere determinato quantitativamente.
A noi interesseranno soprattutto i contributi delle scienze fisiche allo sviluppo
delle conoscenze e delle applicazioni in campo biologico e medico.
Alcuni grandi fisici sono stati prima di tutto medici, ad esempio Daniel
Bernoulli e Luigi Galvani.
Anche dopo la separazione della fisica dalle altre scienze, sia la biologia che
la medicina hanno continuato ad utilizzare i principi ed anche i metodi della
fisica. Oggi si parla anche di biofisica come scienza autonoma.
IL METODO SCIENTIFICO si articola in varie fasi:
- Osservazione del fenomeno
- Scelta delle grandezze fisiche atte a descriverlo
- Formulazione di ipotesi
- Esperimento controllato per la verifica delle ipotesi
- Formulazione della legge sperimentale
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
Dal punto di vista delle connessioni logiche possiamo così rappresentare il
processo che sta alla base della ricerca fisica:
LEGGE FISICA
Deduzione
Induzione
OSSERVAZIONE
DEI FENOMENI
NATURALI
Esperimento
SINGOLO
FENOMENO
GRANDEZZE FONDAMENTALI E DERIVATE
Una volta individuate le grandezze fisiche atte a descrivere il fenomeno che ci
interessa, bisogna scegliere l’unità di misura tramite cui darne una
valutazione numerica.
A tal proposito le grandezze fisiche si distinguono in fondamentali e derivate.
Le grandezze fondamentali sono indipendenti le une dalle altre e combinate
fra loro permettono di esprimere tutte le altre, dette grandezze derivate.
Conseguentemente tutte le unità di misura delle grandezze fisiche possono
essere espresse in funzione di un piccolo numero di unità di misura
fondamentali. Ad esempio pensando alle relazioni che definiscono le varie
grandezze, abbiamo :
– Velocità nel moto rettilineo uniforme:
v
a
– Accelerazione di un corpo:
t
v
S
t
– Forza agente su un corpo di massa m : F m a
– Lavoro di una forza costante che produce un determinato spostamento:
LF S
(modulo della forza per spostamento nella direzione della forza)
– La pressione agente su di una superficie di area A: P
– Carica elettrica: Q I t
F
A
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
Il sistema metrico adottato nella maggioranza dei paesi del mondo è il
Sistema Internazionale (S.I.) adottato alla XI Conferenza Generale dei Pesi e
delle Misure del 1960 e successivamente perfezionato.Le grandezze scelte
come fondamentali sono 7, qui elencate con le proprie unità di misura.
Grandezza Fondamentale
Lunghezza
Massa
Tempo
Intensità di corrente elettrica
Temperatura
Intensità luminosa
Quantità di materia
Unità di misura
metro
kilogrammo
secondo
ampere
(grado) kelvin
candela
mole
Simbolo
m
kg
s
A
K
cd
mol
Conseguentemente ne vengono determinate anche le unità di misura delle
grandezze derivate, come nei casi scelti precedentemente come esempi:
Grandezza
Derivata
Velocità
Accelerazione
Forza
Lavoro
Pressione
Carica elettrica
Equazione
dimensionale
Unità di
misura
l
v
t
v l
a
t t 2
F m a
L F l
P
ml
t
2
m l 2
t 2
F m
l 2 t 2 l
Q I t
Simbolo
(nome)
m
s
m
s2
kg m
s2
N (Newton)
kg m 2
s2
J (Joule)
kg
s 2m
N
Pa
m2
(Pascal)
As
C (Coulomb)
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
MULTIPLI E SOTTOMULTIPLI
A seconda della grandezza di ciò che si deve misurare rispetto alla propria
unità di misura, risulta utile esprimere i propri dati usando multipli o
sottomultipli delle grandezze interessate, per non appesantire la notazione ed
evitare il rischio di errori dovuti ad un eccessivo numero di cifre. A tale scopo
si possono usare i prefissi elencati in tabella.
Tabella dei multipli e sottomultipli
delle unità di misura
Fattore di moltiplicazione
Prefisso
Nome Simbolo
1 000 000 000 000 000 000 exa
E
1 000 000 000 000 000
peta
P
1 000 000 000 000
tera
T
1 000 000 000
giga
G
1 000 000
mega
M
1 000
kilo
k
100
etto
h
10
deca
da
0,1
deci
d
0,01
centi
c
0,001
milli
m
0,000 001
micro
0,000 000 001
nano
n
0,000 000 000 001
pico
p
0,000 000 000 000 001
femto
f
0,000 000 000 000 000 001 atto
a
Ad esempio lo spessore di un libro non lo si esprimerà in m (metri) ma più
comodamente in mm (millimetri), la lunghezza di una strada si scriverà in km
(kilometri), la dimensione di una molecola in nm (nanometri), quella di un
nucleo atomico in fm (femtometri).
Per ragioni storiche si utilizzano ancora alcune unità di misura che non
appartengono al S.I. . Ad esempio si misura il tempo usando l’ora (h), la
velocità in km/h (1 m/s = 3,6 km/h), la capacità usando il litro (l,volume di 1
kg di acqua distillata alla temperatura di 4°C) pari a poco più di 1 dm3 (1 l =
1,000028 dm3, identificabili per quasi tutti gli scopi pratici), l’energia usando il
kilowattora pari a 3 600 000 Joule.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
Quando si ha a che fare con quantità di acqua, per tutti gli scopi pratici si
possono identificare le unità di misura di capacità, volume e massa:
1l 1dm3
corrispondenti a1kg
Per cui, ad esempio:
1 dl 0,1l 101 l 101 dm3
(100 g di acqua)
1cl 0, 01l 102 l 102 dm3 10 cm3
(10 g )
1 ml 0, 001l 103 l 103 dm3 1 cm3
(1 g )
1 hl 100 dm3 0,1 m3
1 kl 1 m3
(1 q, un quintale d ' acqua )
(1t , una tonnellata d ' acqua )
NOTAZIONE SCIENTIFICA
Ogni numero può essere scritto come il prodotto di un numero compreso tra 1
e 10 ed una potenza di 10.
Es. 75300 = 7,53 x 104 ; 0,000037 = 3,7 x 10-5.
LA MISURA
La misura può essere
- diretta: se ottenuta per confronto diretto con l’unità di misura
- indiretta: se ricavata utilizzando opportune relazioni analitiche (formule)
- tramite strumenti tarati analogici o digitali
Ogni strumento di misura è caratterizzato da
- Sensibilità: s = 1/a0 dove a0 è il valore minimo della grandezza che può
essere apprezzato dallo strumento (ad es. in una bilancia, 1 div/g)
- Precisione: uno strumento è tanto più preciso quanto minore è lo scarto
dei valori di una grandezza ottenuti in una serie di misure ripetute
- Portata o fondo scala: massimo valore della grandezza che lo
strumento può misurare (superarla non permette di ottenere misure
valide e può danneggiare lo strumento)
- Prontezza: indica il tempo necessario per ottenere la misura richiesta e
per poterla ripetere
- Classe: indica la percentuale del fondo scala che costituisce l’errore
massimo che accompagna la misura. Viene fornito dal costruttore dello
strumento (Es. amperometro con fondo scala di 2 A, classe 1,5,
significa che ogni misura è affetta da un errore pari a 1,5x 2:100 = 0,03
A).
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
ERRORI
Non è possibile dare una valutazione corretta di una misura senza conoscere
l’errore che l’accompagna. Non esistono misure esatte.
Ogni misura di una grandezza va data con il suo errore nella forma
G ( x x) U
oppure lo sottintende.
Per es. una misura di massa potrebbe essere m (315 10) g .
Se invece scrivo che una lunghezza è L 47,3 cm sto sottintendendo che
l’errore viene assunto essere pari ad una unità sull’ultima cifra decimale, cioè
uguale ad 1 mm .
Si definisce errore assoluto delle singole misure nei confronti del valor vero,
la differenza, presa in valore assoluto, tra il valore vero x della grandezza ed
il valore xi (i 1;2;3;...; n) di ciascuna misura
x x xi
Si definisce invece, errore relativo il rapporto tra l’errore assoluto x ed il valor
vero x della grandezza in esame (o la sua miglior stima)
x x xi
x
x
Moltiplicando per 100 l’errore relativo si ottiene l’errore relativo percentuale.
In relazione al valore vero della grandezza da misurare e alle loro cause, gli
errori si distinguono in casuali (accidentali) e sistematici.
Si definiscono casuali quegli errori che dipendono da circostanze perturbatrici
fortuite. Essi influiscono su una serie di misure ripetute a volte per eccesso
ed a volte per difetto, con intensità variabile. Essendo legati a fenomeni
incontrollabili che si sovrappongono al fenomeno in esame in modo casuale,
essi non sono eliminabili.
Si definiscono sistematici gli errori che dipendono da difetti dello strumento,
vizi nel metodo usato, uso di formule approssimate, comportamenti
dell’osservatore che influenzano il risultato sempre nella stessa direzione e
con intensità ben determinata. Si possono eliminare o ridurre, una volta
individuatane la causa, modificando i metodi di misura, gli strumenti, gli
osservatori o introducendo correzioni matematiche nell’elaborazione dei dati.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
MEDIA E SCARTO QUADRATICO MEDIO
Nel caso di misure ripetute si considera come valore che meglio approssima
il valor vero della grandezza in esame il valor medio delle misure ottenute
n
x x x
x
i
i 1
1
2
x3
n
xn
n
Una misura grossolana dell’errore associato al valor medio è data dalla
semidispersione massima, cioè dalla metà della differenza tra il valore più
alto ed il più basso ottenuti
x
xmax xmin
2
Un’altra stima dell’errore commesso si ottiene calcolando lo scarto quadratico
medio delle misure ottenute, cioè la radice quadrata della media degli scarti
quadratici delle misure dal valor medio
n
x
(x
i 1
i
x) 2
n
Tale quantità ha un significato statistico preciso, in quanto, se le misure sono
soggette a fluttuazioni casuali, il 68% di esse dovrebbe differire, per eccesso
o per difetto, meno di x dal valor medio.
Quando non si hanno misure ripetute o altre indicazioni sulla grandezza
dell’errore, esso viene assunto essere pari all’inverso della sensibilità dello
strumento utilizzato, cioè alla più piccola variazione della grandezza
misurabile.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
SCALARI E VETTORI
GRANDEZZE SCALARI
Una grandezza fisica si dice scalare quando per definirla è sufficiente
conoscerne il modulo, cioè la sua grandezza e l’unità di misura.
Ne possono essere esempi la distanza, il volume, la temperatura, la
pressione di un gas, la carica elettrica, l’energia, il lavoro.
GRANDEZZE VETTORIALI
Una grandezza fisica (indicata con V ) si dice vettoriale quando per definirla
occorre conoscere oltre al modulo V anche la sua direzione ed il suo verso (a
volte anche il punto di applicazione). Si può rappresentare graficamente
tramite un segmento, la cui lunghezza sia proporzionale al modulo, orientato
tramite una freccia.
Esempi di grandezze tipicamente vettoriali sono gli spostamenti, la velocità,
l’accelerazione, la forza, il campo elettrico o quello magnetico.
SOMMA DI VETTORI
Per somma di due vettori V 1 e V 2 , di cui faremo coincidere gli estremi iniziali,
si intende il vettore V dato dalla diagonale del parallelogrammo costruito su di
essi.
Se i due vettori hanno la stessa direzione la somma si effettua, a seconda
che abbiano versi uguali o contrari, come l’addizione o la sottrazione di
segmenti della stessa retta. Solo in questi casi il modulo della somma
coinciderà con la somma o la differenza dei moduli dei due vettori addendi e
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
nel caso di versi opposti il verso della somma coinciderà col verso del vettore
addendo di modulo maggiore.
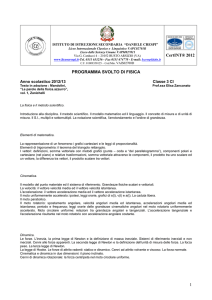
Nella figura seguente è illustrato un esempio di somma di più vettori col
metodo punta-coda che consiste nel rappresentare i successivi vettori da
sommare con l’origine posta sulla punta del vettore precedente. Il vettore
somma è il vettore che si ottiene unendo l’origine del primo vettore con la
punta dell’ultimo. Il metodo è equivalente alla ripetuta applicazione del
metodo del prallelogrammo.
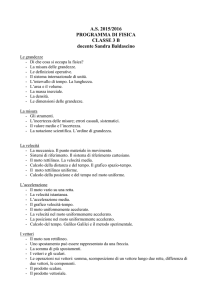
Esempio della validità della somma di due vettori.
Se considero lo spostamento di un marinaio che cammina sul ponte di una
nave in movimento durante un certo intervallo di tempo, lo spostamento
AD del marinaio rispetto a terra sarà la somma vettoriale dello spostamento
AC della nave rispetto a terra e dello spostamento AB del marinaio sulla
nave.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
DIFFERENZA DI VETTORI
Per differenza di due vettori V 1 e V 2 si intende il vettore V dato dalla dalla
somma di V 1 con il vettore opposto di V 2 e che indicheremo con V 2 .
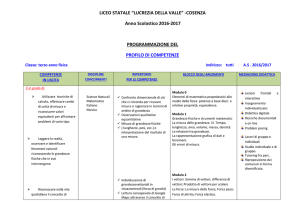
COMPONENTI DI UN VETTORE
Ogni vettore può essere scomposto nelle sue componenti in una direzione
data ed in una direzione ad essa perpendicolare.
Considerato un vettore V e tracciata una retta nella direzione desiderata
passante per l’origine del vettore, la componente di V nella direzione
assegnata si ottiene tracciando la proiezione ortogonale del vettore sulla
retta. La componente ortogonale (perpendicolare) non è altro che il vettore
che unisce la punta della componente nella direzione data con la punta del
vettore iniziale. Come è evidente dalla seguente figura, il vettore di partenza
non è che la somma delle sue componenti.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
PRODOTTO DI UN VETTORE PER UNO SCALARE
Il prodotto di un vettore V per uno scalare a è un vettore che ha la stessa
direzione del vettore di partenza, modulo pari al prodotto di V per il modulo di
a e verso coincidente oppure opposto a quello di V a seconda che a sia
positivo o negativo.
Esempio: seconda legge della dinamica,
F ma
PRODOTTO SCALARE DI DUE VETTORI
Il prodotto scalare di due vettori è lo scalare che si ottiene moltiplicando il
modulo di uno dei vettori per la proiezione del secondo vettore nella direzione
del primo (o viceversa).
Esempio: Calcolo del lavoro, L F S
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
MECCANICA
La meccanica si occupa della descrizione del moto dei corpi, delle cause che
lo producono, e delle condizioni che permettono l’equilibrio.
A seconda di quale di questi tre aspetti attira maggiormente la nostra
attenzione si suole parlare di Cinematica, Dinamica e Statica.
Meccanica
Cinematica:
Descrizione
del moto dei
corpi
Dinamica:
Studio
delle cause
del moto
Statica:
Studio delle
condizioni di
equilibrio
Come vengono descritti i corpi il cui moto va studiato?
La più semplice idealizzazione consiste nel pensare un corpo come un
punto materiale cioè un oggetto puntiforme (di dimensioni nulle) in cui è
concentrata la massa m del corpo stesso. Questa idealizzazione ha il
vantaggio che permette di trascurare l’orientamento del corpo nello spazio.
É una buona approssimazione quando si considerano spostamenti di
grandezza molto superiore alle dimensioni reali del corpo in esame.
Uno dei modi più comuni per individuare la posizione di un punto
materiale è quello di scegliere un sistema di riferimento S costituito da
tre assi cartesiani ortogonali x, y e z, di mettersi in un punto di
osservazione solidale con tale sistema e di costruire un vettore che ha per
modulo la distanza del punto P dall’origine O degli assi, direzione della
congiungente di P con O e verso da O verso P. tale vettore posizione è
spesso indicato con r . Se da P conduciamo le parallele agli assi ne
risultano univocamente determinate le coordinate x, y e z del punto.
Quando il punto P subisce un cambiamento di posizione, tale variazione
viene espressa dal vettore spostamento r r2 r1 . Quando un punto
è in moto, la linea continua che congiunge i vari punti occupati
successivamente dal corpo si chiama traiettoria. Il moto di un corpo
risulta completamente individuato quando se ne conosce in ogni istante la
posizione, ovvero la legge oraria che descrive la posizione in funzione del
tempo. Le tabelle di un orario ferroviario sono un esempio tabulato della
legge oraria di un moto.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
VELOCITÀ
Se mi muovo percorrendo su una linea spazi uguali in tempi uguali è
immediato definire la velocità come rapporto tra lo spazio percorso ed il
tempo impiegato per percorrerlo. In generale c’è pero bisogno di essere
più precisi per cui si parla di velocità media quando si usa
vm
r r2 r1
t t 2 t1
Dove t 2 e t1 sono gli istanti di tempo in cui misuro la posizione.
Quando si calcola la velocità media in intervalli di tempo sempre più piccoli
(tendenti a 0) si parla invece di velocità istantanea, che può quindi
cambiare in ogni istante di tempo. Considerando intervalli di tempo sempre
più piccoli, ci si può rendere conto che quando il corpo si muove lungo una
linea curva, il vettore velocità istantanea risulta sempre tangente alla
traiettoria.
Nel caso del moto rettilineo uniforme v m cos t e coincide con la
velocità istantanea, per cui, scelta una coordinata x, si può scrivere la
legge oraria del moto
x v t x0
dove
x 0 indica la posizione iniziale del corpo al tempo 0.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
ACCELERAZIONE
Quando la velocità di un corpo varia nel tempo si definisce il vettore
accelerazione che descrive appunto come cambia la velocità.
Anche in questo caso si distingue fra accelerazione media nell’intervallo
di tempo
t definita come
am
v v2 v1
t t 2 t1
ed accelerazione istantanea quando tale rapporto è calcolato al limite per
t tendente a 0.
Nel caso in cui l’accelerazione sia costante nel tempo si parla di moto
rettilineo uniformemente accelerato. In tal caso è la velocità a cambiare
linearmente nel tempo per cui
v a t v0
dove v0 indica la velocità iniziale del corpo al tempo 0.
La legge oraria risulta invece essere
1
x at 2 v0 t x0
2
Esempio: caduta libera sotto l’azione della forza di gravità vicino alla
superficie terrestre (forza peso).
a
è diretta verso il basso ed ha il valore
a g 9,806
m
s2
.
In generale la velocità di un corpo può cambiare non solo in modulo ma
anche in direzione, Tutti i moti curvilinei risultano quindi accelerati, anche
se non cambia il modulo della velocità. Se cambia solo la direzione della
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
velocità, l’accelerazione risulta essere centripeta, cioè rivolta verso il
centro della curva che si sta percorrendo.
Se varia anche il modulo della velocità, l’accelerazione potrà in generale
essere decomposta in due componenti, una tangenziale alla traiettoria ed
una centripeta, ad essa perpendicolare.
a at ac
Un caso particolarmente interessante è quello del moto circolare
uniforme che avviene su di una traiettoria circolare di raggio R con una
velocità in modulo (ma non direzione) costante
v v.
Per tale moto valgono le seguenti relazioni scalari che coinvolgono anche il
periodo T del moto, la sua frequenza f (misurata in cicli al secondo o Hertz,
Hz) e la velocità angolare ω (misurata in radianti al secondo, rad/s):
f
v
1
T
2 f
2 R
R
T
2
T
v2
ac
2R v
R
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
Esempio: Moto in caduta libera
Trascurando l’attrito viscoso con l’aria il moto di caduta libera di un corpo
soggetto al proprio peso può essere considerato un moto rettilineo
uniformemente accelerato.
Se il corpo è inizialmente fermo e comincia a cadere dall’altezza h, quanto
tempo impiega per toccare il suolo e con quale velocità arriva a toccarlo?
h
1 2
gt
2
v gt g
t
2h
g
2h
2gh
g
Se un suicida si getta dal quarto piano di un condominio (h=12 m), per
cadere impiega il tempo
t
2 12 m
1,56 s
m
9,8 2
s
m
m
10 3 km
55 km / h
ed arriva a terra con la velocità v 9,8 2 1,56 s 15,3 15,3 1
s
s
h
3600
Esempio: Accelerazione di un auto su percorso rettilineo
Se un’auto partendo da ferma raggiunge i 100 km/h in 8 s, a quale
accelerazione sono sottoposti i passeggeri?
v FIN
v
a
t
km 100 m
m
100
27,8
h
3,6 s
s
m
m
0
s
s 3,5 m
8s 0s
s2
27,8
Esempio: Accelerazione percorrendo una curva di raggio R alla velocità V
Se percorro una curva di raggio R = 40 m alla velocità di 180 km/h, il mio
corpo, ed in particolare le vertebre del mio collo, dovranno reggere una
accelerazione pari a
2
180 m
v 2 3,6 s
m
a
62,5 2
R
40m
s
cioè più grande di almeno sei volte rispetto all’usuale accelerazione di
gravità.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA
Esempio: Centrifuga per microematocrito
Piccole quantità di sangue poste in provetta con eparina (anticoagulante)
vengono fatte ruotare in una centrifuga per separarne fisicamente le varie
componenti (globuli rossi e plasma, la frazione di volume occupata da globuli
rossi è un importante indicatore clinico).
Se le provette vengono fatte ruotare a 11500 giri/min con il fondo a 9,07 cm
dall’asse di rotazione, trovare il modulo della velocità tangenziale del fondo
della provetta e l’accelerazione centripeta nello stesso punto.
11500
giri
2 rad
rad
11500
1204
min
60 s
s
v R 1204
rad
m
9,07 10 2 m 109,2
s
s
2
m
109
,
2
v2
m
s
5 m
a
131473
1
,
3
10
R 9,07 10 2 m
s2
s2
L’accelerazione sul fondo della provetta è più di 10000 volte superiore alla
normale accelerazione di gravità g=9,8 m/s2.
Il sangue nel fondo della provetta (che è un sistema di riferimento accelerato)
sente una enorme accelerazione centrifuga pari all’accelerazione centripeta
misurata nel laboratorio. Ciò spiega la separazione delle sue componenti a
seconda della loro densità.
________________________________________________________________________
Corso integrato di Basi funzionali del corpo umano. A. Culatti Zilli, FISICA