MOTORI CORRENTE ALTERNATA:
CARATTERISTICA MECCANICA
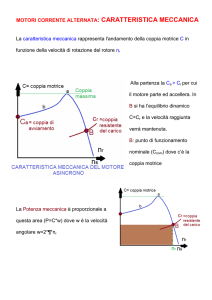
La caratteristica meccanica rappresenta l'andamento della coppia motrice C in
funzione della velocità di rotazione del rotore nr
Alla partenza la Ca > Cr per cui
il motore parte ed accellera. In
B si ha l’equilibrio dinamico
C=Cr e la velocità raggiunta
verrà mantenuta.
B: punto di funzionamento
nominale (Cnom) dove c’è la
coppia motrice
La Potenza meccanica è proporzionale a
questa area (P=C*w) dove w è la velocità
angolare w=2*¶*nr
Se Cm< Cnom allora, a causa della elevata
pendenza della curva caratteristica ad una
piccola diminuzione di nr (nr nr’)
corrispondono grandi incrementi della coppia
motrice Cm’
Si può avere facilmente che la potenza
erogata dal motore supera di oltre il 50% quella nominale con anomali
riscaldamenti e possibilità di danni nel funzionamento prolungato. Per questi motivi
è vivamente consigliato il mantenimento della coppia erogata al valore nominale.
Se Cm< Cnom allora in queste condizioni il n° di giri aumenta e lo scorrimento
diminuisce rispetto ai valori nominali. Non vi sono controindicazioni se non
economiche perché si è acquistato un motore di taglia maggiore di quella richiesta.
Curva caratteristica al variare di f e di V
Comportamento Cmotrice al variare della Cresistente
Caso P1: se si ha un aumento imprevisto
di Cr, il motore rallenta ed il, punto sulla
caratteristica si sposta verso l’alto con
conseguente aumento della coppia
motrice. Se al contrario si ha una
accelerazione dovuta alla riduzione di Cr,
il punto si sposta verso il basso con Cm
che diminuisce: in entrambi i casi il
motore reagisce ripristinando l’equilibrio.
OB funzionamento stabile
Caso P2: se si ha un aumento imprevisto
di Cr il motore rallenta ed il punto sulla
caratteristica meccanica si sposta verso
sinistra con conseguente diminuzione di
Cm per cui il motore rallenta ulteriormente
fino ad arrestarsi.
Se invece in P2 si ha una accelerazione
per una diminuzione di Cr, il punto sulla
caratteristica si sposta verso l’alto con
conseguente aumento di Cm, per cui il
motore accelera ulteriormente fino a raggiungere la condizione di stabilità
nell’intorno di P1. AO funzionamento instabile
RENDIMENTO
Il rendimento del motore asincrono trifase lo possiamo calcolare con la solita
formula:
=Pr/Pa dove
Pr= potenza meccanica utilizzata dal rotore Pa: pot. elettrica assorbita sullo statore
La potenza sullo statore è di tipo elettrico e la si può misurare con dei wattmetri;
essendo la potenza sul rotore di tipo meccanico la possiamo trasformare in
potenza di tipo elettrico se ci calcoliamo le perdite.
Le perdite di potenza Pp sono dovute:
al riscaldamento degli avvolgimenti di statore e di rotore per effetto Joule;
ai flussi magnetici dispersi nello statore e nel rotore;
agli attriti meccanici e alle ventole di raffreddamento.
Potenza resa sul rotore:
Pr = Pa - Pp
Di conseguenza il rendimento diventa:
= (Pa - Pp)/ Pa
Il rendimento è basso per i piccoli motori (intorno al 77%) mentre è elevato per i
grandi motori e raggiunge il 94%
Motore asincrono monofase
Per le piccole potenze si costruiscono dei motori asincroni monofasi, cioè quelli
che utilizzano la comune tensione presente nelle abitazioni civili tra fase e neutro a
220 V e 50 Hz.
motore asincrono monofase
Vi sono due avvolgimenti; un primo avvolgimento principale è quello che funziona
a regime e non è in grado di generare un campo magnetico rotante tale da far
partire il motore; di conseguenza occorre un secondo avvolgimento detto di
avviamento che ha lo scopo di far partire il motore sotto carico. L'avvolgimento di
avviamento ha in serie un condensatore, il quale ha la funzione di sfasare di 90° la
corrente dell'avvolgimento di avviamento, rispetto a quella dell'avvolgimento
principale. In tal modo si genera un campo magnetico rotante in grado di far partire
il motore. Una volta partito l'avvolgimento di avviamento può essere staccato
mediante un interruttore che si stacca non appena sia raggiunta la velocità di
regime, a causa della forza centrifuga.
CRITERI DI DIMENSIONAMENTO PER INSTALLAZIONI MOTORI ASINCRONI
Nella installazione di motori in dispositivi di sollevamento e movimentazione
(montacarichi, nastri trasportatori, coclee ed argani) si sceglierà quel motore in
base alla coppia (Cnom>Cresist). La velocità di sollevamento o movimentazione sarà
quella corrispondente al numero di giri nominale del motore
Esercizio: un riduttore deve azionare il tamburo di un argano di sollevamento. La
coppia di tamburo a regime è CT= 50 [Kgf*m] e nT= 75 [giri/1’]. Considerando il
rendimento del riduttore
=0,90 scegliere il tipo di motore.
Svolgimento: scegliendo un motore a 4 poli (p=2)
ns= 60*f/p = 60*50/2 =1.500 [giri/1’]
Considerando in prima approssimazione nr= 1.400 [giri/1’] il rapporto di
trasmissione i=1400/75= 18,67 e la coppia motrice Cm= Ct/(i* )=
50/(18,67*0,9)= 2,98 [Kgf*m]
Il motore scelto è MV132 Sg 4 con Cnom= 3,58 [Kgf*m]
Installazione per pompe centrifughe e ventilatori
Per essi si sceglierà il motore in base alla potenza; le portate e le
prevalenze saranno quelle relative ai diagrammi delle pompe e dei
ventilatori al numero di giri nominale del motore.
Esercizio: una pompa centrifuga richiede la potenza di 2,7 [KW] a 1.400
giri per sollevare 80 [m3/h] di H2O a 7,5 [m]
Svolgimento: i l motore a 4 poli scelto è MV100L4 con dati nominali pari
a 3[KW]-1420 [giri/1’]