Facoltà di Ingegneria di Reggio Emilia
Corso di
Controlli Automatici
Corsi di laurea in Ingegneria Meccatronica
ed in Ingegneria della Gestione Industriale
Ing. Alessandro Macchelli
e-mail: [email protected]
web: http://www-lar.deis.unibo.it/people/amacchelli
Università di Reggio Emilia
Corso di Controlli Automatici
1
Analisi dei sistemi in retroazione
Università di Reggio Emilia
Corso di Controlli Automatici
2
Funzione d’anello
9 molte delle caratteristiche della funzione di trasferimento
complessiva F(s) dipendono direttamente dalle proprietà
della funzione d’anello L(s).
9 le proprietà del sistema in retroazione vengono dedotte da
uno studio opportuno della funzione L(s).
9 il diagramma di Bode della funzione L(s) è uno strumento
potenete per descrivere le proprietà del sistema complessivo
e per progettare il controllore C(s) in modo da ottenere un
desiderato “comportamento” per il sistema in retroazione.
Università di Reggio Emilia
Corso di Controlli Automatici
3
1
Introduzione
9 controllore C(s) interconnesso in retroazione al sistema G(s):
r(t)
e(t)
+
-
C(s)
u(t)
G(s)
y(t)
9 f.d.t. complessiva:
9 L(s) = C(s)G(s) è detta funzione d’anello.
Università di Reggio Emilia
Corso di Controlli Automatici
4
Margine di guadagno – Margine di fase (1)
9 margine di guadagno:
• massima amplificazione del segnale consentita nel controllo in
retroazione
9 margine di fase:
• massimo ritardo del segnale consentito nell’anello di controllo
(Tmax = φ / ωc)
• ωc è detta pulsazione critica.
Università di Reggio Emilia
Corso di Controlli Automatici
5
Margine di guadagno – Margine di fase (2)
9 il margine di guadagno ed il margine di fase possono essere
facilmente evidenziati nei diagrammi di Bode (modulo e
fase) della funzione d’anello L(s).
9 margine di guadagno:
si evidenzia la pulsazione ωn alla quale la fase vale –180o e
sul diagramma del modulo si osserva la distanza dall’asse a
0 dB.
9 margine di fase:
si evidenzia la pulsazione ωc alla quale il modulo vale 0 dB e
sul diagramma della fase si osserva la distanza dalla retta a
–180o.
Università di Reggio Emilia
Corso di Controlli Automatici
6
2
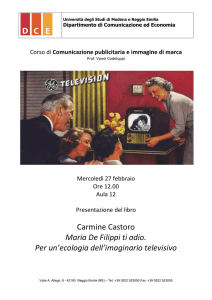
Margine di guadagno – Margine di fase (3)
9 Esempio:
Bode Diagram
20
Magnitude (dB)
0
-20
-40
-60
-80
0
Phase (deg)
-45
-90
-135
-180
-225
-270
-1
10
10
0
10
1
10
2
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
7
Stabilità del sistema in retroazione (1)
9 analisi dei poli della f.d.t.:
9 se L(s) = NL(s) / DL(s), si ottiene
9 quindi:
• gli zeri della f.d.t. complessiva sono gli stessi della f.d.t.
d’anello
• i poli della f.d.t. complessiva non coincidono con quelli della
f.d.t. d’anello, ma dipondono dagli zeri e dai poli di L(s).
Università di Reggio Emilia
Corso di Controlli Automatici
8
Stabilità del sistema in retroazione (2)
9 la stabilità della f.d.t. F(s) può essere analizzata applicando il
criterio di Routh al polinomio al denominatore, dato dalla
somma:
9 sarebbe comodo possedere un metodo per studiare la stabilità a
partire dal diagramma di Bode di L(s)…???!!
Università di Reggio Emilia
Corso di Controlli Automatici
9
3
Criterio di Bode
9 ipotesi:
• L(s) stabile
• diagramma di Bode di L(s) attraversa solo una volta e dall’alto
in basso l’asse a 0 dB
9 tesi:
• il sistema complessivo è (asintoticamente) stabile se e solo se:
il guadagno di L(s) è positivo
il margine di fase di L(s) è positivo
9 non è necessario calcolare la f.d.t. del sistema in retroazione
Università di Reggio Emilia
Corso di Controlli Automatici
10
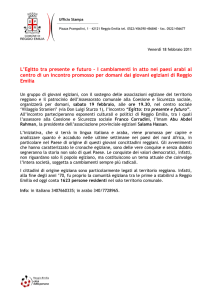
Esempio (1)
Bode Diagram
20
Magnitude (dB)
10
0
-10
-20
-30
0
Phase (deg)
-45
-90
-135
-180
-225
-1
10
10
0
10
1
Frequency (rad/sec)
9 margini di ampiezza / fase: K = 7.04dB - φ = 29o
Università di Reggio Emilia
Corso di Controlli Automatici
11
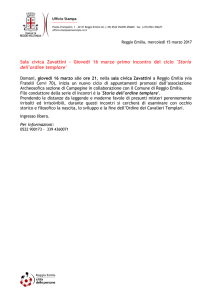
Esempio (2)
9 G(s) in retroazione unitaria fornisce un sistema stabile (per il
criterio di Bode)
Bode Diagram
10
Magnitude (dB)
5
0
-5
-10
-15
-20
0
Phase (deg)
-45
-90
-135
-180
-225
0
10
10
1
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
12
4
Esempio – Criteri di Bode & Routh (1)
9 consideriamo il sistema in retroazione seguente
r(t)
e(t)
+
u(t)
C(s)
-
G(s)
y(t)
con
9 abbiamo che:
Università di Reggio Emilia
Corso di Controlli Automatici
13
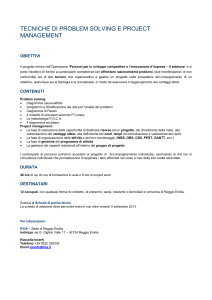
Esempio – Criteri di Bode & Routh (2)
9 diagramma di Bode di G(s):
Bode Diagram
0
-50
-100
-150
0
-45
Phase (deg)
margine di guadagno
di circa 40dB, da cui
K=100.
Magnitude (dB)
50
-90
-135
-180
-225
-270
-3
10
10
-2
10
-1
10
0
10
1
10
2
10
3
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
14
Esempio – Criteri di Bode & Routh (3)
9 verifichiamo con il criterio di Routh applicato al denominatore
di F(s):
9 condizione K < 102.2 per la stabilità (margine di guadagno)
Università di Reggio Emilia
Corso di Controlli Automatici
15
5
Studio della f.d.t. complessiva (1)
9 comportamento “ideale” del sistema in retroazione: F(s) = 1.
9 studio del modulo della f.d.t. complessiva:
9 nel caso | L | >> 1
9 nel caso | L | << 1
Università di Reggio Emilia
Corso di Controlli Automatici
16
Studio della f.d.t. complessiva (2)
9 Esempio:
Bode Diagram
20
Magnitude (dB)
0
-20
-40
-60
-80
0
Phase (deg)
-45
-90
-135
-180
-225
-270
-1
10
10
0
10
1
10
2
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
17
Studio della f.d.t. complessiva (3)
9 il diagramma di Bode (modulo e fase) della f.d.t.
complessiva F(s) possono essere facilmente disegnati sulla
base del corrispondente diagramma della f.d.t. di anello L(s).
9 gli zeri di F(s) sono quelli della f.d.t. d’anello L(s).
9 i poli a bassa frequenza che “precedono” la pulsazione
critica vengono traslati in prossimità di essa (o in prossimità
degli zeri da “cancellare”), mentre gli altri poli ad alta
frequenza rimangono quasi del tutto invariati.
Università di Reggio Emilia
Corso di Controlli Automatici
18
6
Studio della f.d.t. complessiva (4)
9 il sistema in retroazione ha guadagno unitario per tutte le
frequenze fino alla pulsazione critica ωc (larghezza di banda)
9 un taglio dell’asse a 0 dB con pendenza unitaria (-20
dB/dec.) dà luogo ad un unico polo con valore pari alla
pulsazione critica
9 un taglio dell’asse a 0 dB con pendenza doppia (-40
dB/dec.) dà luogo a due poli complessi coniugati (oppure
reali) con pulsazione pari a quella critica
• lo smorzamento della coppia di poli complessi è direttamente
proporzionale al margine di fase
Università di Reggio Emilia
Corso di Controlli Automatici
19
Prestazioni dinamiche
9 il sistema ha una velocità di risposta ad una variazione del
riferimento (ingresso a scalino) legata alla larghezza di
banda del sistema in anello chiuso (polo dominante)
9 il guadagno complessivo è unitario
9 lo smorzamento di eventuali poli complessi coniugati è
legato al margine di fase della f.d.t. d’anello attraverso la
seguente relazione empirica:
9 i poli sono considerati reali se:
Università di Reggio Emilia
Corso di Controlli Automatici
20
Prestazioni dinamiche – Esempio (1)
Bode Diagram
100
Magnitude (dB)
50
0
-50
-100
-150
0
Phase (deg)
-45
-90
-135
-180
-225
-270
-3
10
10
-2
10
-1
10
0
10
1
10
2
10
3
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
21
7
Prestazioni dinamiche – Esempio (2)
9 sistema in retroazione instabile:
Bode Diagram
100
Step Response
Magnitude (dB)
10
8
6
Amplitude
4
50
0
-50
2
0
-100
-2
180
-4
90
-8
0
0.5
1
1.5
2
Phase (deg)
-6
2.5
Time (sec)
0
-90
-180
risposta al gradino unitario
-270
-3
10
10
-2
10
-1
10
0
10
1
10
2
10
3
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
22
Prestazioni dinamiche – Esempio (3)
9 f.d.t. d’anello | L(s) | >> 1 su tutte le frequenze
Bode Diagram
60
50
Magnitude (dB)
40
30
20
10
0
-10
Phase (deg)
0
-30
-60
-2
10
10
-1
10
0
10
1
10
2
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
23
Prestazioni dinamiche – Esempio (4)
9 f.d.t. d’anello | L(s) | >> 1 su tutte le frequenze, ma a fase non minima
sistema risultante instabile
Bode Diagram
40
Step Response
Magnitude (dB)
1.2
1
0.8
0.6
Amplitude
0.4
35
30
25
0.2
20
0
180
-0.2
-0.4
-0.8
0
0.5
1
1.5
2
2.5
Time (sec)
3
Phase (deg)
135
-0.6
90
45
risposta al gradino unitario
0
-1
10
10
0
10
1
10
2
Frequency (rad/sec)
Università di Reggio Emilia
Corso di Controlli Automatici
24
8
Effetto dei disturbi (1)
9 i segnali d1(t) e d2(t) sono disturbi
r(t)
e(t)
+
u(t)
C(s)
-
G(s)
d1(t)
+
y(t)
+
d2(t)
9 il disturbo (1) agisce sull’uscita secondo la f.d.t.
9 il disturbo (2) agisce sull’uscita secondo la f.d.t.
Università di Reggio Emilia
Corso di Controlli Automatici
25
Effetto dei disturbi (2)
9 il disturbo (1) viene attenuato in bassa fraquenza in quanto
| L(jω) | >> 1; se si allarga la banda passante del sistema in
retroazione, si ottengono maggiori benefici sul segnale di
uscita anche se la parte in alta frequenza del disturbo
rimane.
9 il disturbo (2) viene visto a bassa frequenza come un
segnale di riferimento da inseguire e deve essere evitato a
tutti i costi. Viene attenuato in alta frequenza.
• il rumore sul sensore di misura è un tipico disturbo che agisce
in retroazione
Università di Reggio Emilia
Corso di Controlli Automatici
26
Facoltà di Ingegneria di Reggio Emilia
Corso di
Controlli Automatici
Corsi di laurea in Ingegneria Meccatronica
ed in Ingegneria della Gestione Industriale
Ing. Alessandro Macchelli
e-mail: [email protected]
web: http://www-lar.deis.unibo.it/people/amacchelli
Università di Reggio Emilia
Corso di Controlli Automatici
27
9