Preparazione, test, deployment della Torre
di NEMO-Fase2: stato e prospettive
• Torre di NEMO-Fase2:
– validare la Torre come Detection Unit: OMs, meccanica,
unfurling, elettronica, fotonica;
– verificare le condizioni sperimentali nel sito di Capo Passero:
bioluminescenza, lunghezza di trasmissione, correnti;
– validare il sistema di posizionamento acustico, confrontare le
proprietà dei diversi sensori acustici;
– validare il sistema di calibrazione temporale;
– validare il sistema di Data Acquisition a terra (TriDAS);
– validare il sistema di slow control (sensori e strumenti
oceanografici);
– dimostrare la capacità di operare a 3500m;
– verificare le condizioni ambientali simulate nei MonteCarlo per
DU a Capo Passero;
– validare Porfido, …
Antonio Capone - Coll. Meeting - LNS 7/12/2012
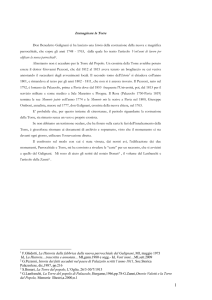
FCM
OM
Hydro
Instruments
0
0
NO
Mon. Stat.
Not working
ACSA beacon
Laser Beacon
Acou Beacon
1
1
OK
OK
CTD – 7000
Nano-B 470 nm
OM 2,3 down
2
2
OK
OK
Nano-B 470 nm
OM 2,3 down
3
3
OK
OK
Nano-B 440 nm
OM 2,3 down
4
4
OK
OK
Cstar
Nano-B 400 nm
OM 2,3 down
5
5
OK
Not working
DCS
6
7
OK
OK
7
8
OK
OK
8
6
OK
OAM OK
Porfido
- Coll.1,4
Meeting
- LNS 7/12/2012
OM 2,3Antonio
downCaponeOM
horizon
Porfido
OM 1,4 horizon
G. Riccobene
floor
Integrazione e tests
• Ogni singolo componente della Torre è stato provato e
calibrato individualmente (FEM, FCM, idrofoni,
AcuBoards, …)
• Durante l’integrazione i piani sono stati provati
individualmente caratterizzandone consumi, budget
ottico, …
• Ad agosto 2012 la Torre, con tutti i moduli di piano
collegati, è stata integrata con il sistema di acquisizione e
trigger TriDAS.
• Prima calibrazione temporale con Laser esterno
• A settembre la Torre è stata assemblata sulla “base”,
oscurata (Pisa) e di nuovo sottoposta a tests di
acquisizione;
• Seconda calibrazione temporale
Antonio Capone - Coll. Meeting - LNS 7/12/2012
the floor electronics
PMT DAQ Boards
Hydrophones DAQ Board
Ethernet Floor Control Module
100 km
Floor Control
Module
Slow Control Interface
GPS receiver
PMT DAQ Boards
Off-Shore
On-Shore
Network
Architecture
@ Porto
ero
s
s
o Pa ant
p
a
C
pli
m
o
c
... GARR
permettendo ...
Antonio Capone - Coll. Meeting - LNS 7/12/2012
T. Chiarusi
with
A. Paolucci (Bo)
F. Ferrera (LNS)
News:
* tubof ono ( tmp bypass the Many Ack Mess) with F. Simeone (Roma)
* >1 TCPU processes per TCPU server (depending on the machine)
T. Chiarusi
Sector 1
#8
#7
#6
#5
Un test di lunga durata ed esaustivo
non è ancora stato possibile
Sector 0
#4
#3
#2
#1
EFCMs
Antonio
- Coll. Meeting -Filtering
LNS 7/12/2012
TimeCapone
Slicing
PT- file
T. Chiarusi
Antonio Capone - Coll. Meeting - LNS 7/12/2012
Time calibration
Reminder:
Ogni PMT misura gl intervalli di tempo con precisione ma con un
certo ritardo caratteristico (come se fosse un orologio preciso ma non
ben regolato)
I riferimenti di tempo sono distribuiti da riva
le misure dei PMT
sono ‘in ritardo’ rispetto a riva
occorre stimare time offset, per
ogni PMT, da aggiungere a tutte le misure dei tempi di hit
Torre dotata di:
Sistema di calibrazione interno che comprende un impulsatore LED in
ogni modulo ottico (occorre correggere le misure di calibrazione in
base alle caratteristiche dei singoli impulsatori)
Nanobeacons su alcuni piani e laser beacon a base torre (sistemi
utilizzabili solo sott’acqua)
A completamento: calibrazione con laser esterno (vedere prossima slide)
MCirce: Time calibration, Catania, 7 Dec. 2012
8
Calibrazione con laser esterno
Approccio:
si utilizza un’unica sorgente ottica con circuito in fibra ottica (di ritardi noti) per
sollecitare i PMT
Trigger in fase con il conteggio del tempo nell’apparato (semplifica l’analisi)
Scopo:
Misura dei time offsets con sistema indipendente dai sistemi montati sulla torre
Verifica di funzionalità del sistema di acquisizione e misura della time resolution
Splitter ottico
Due tipi di supporti: a fascia (sopra)
e a coppa (destra)
MCirce: Time calibration, Catania, 7 Dec. 2012
9
Analisi dei dati
Events
Per ogni PMT si eseguono tre semplici passi:
Picco dei
calibration hits
Background
‘piatto’
Picco di
calibrazione
Posizione:
time offset
Background
minimo
Afterpulses
Larghezza:
time
resolution
‘Time in frame’ (tens of ns)
‘Time in frame’ (tens of ns)
1° passo: si fa l’istogramma
2° passo: si zooma sul picco,
dei tempi di acquisizione
selezionando solo i time
(con risoluzione a 5 ns)
frames «di calibrazione»
all’interno dei ‘time frames’
(uno ogni 64, i.e. 32 Hz) –
di 500 μs per tutti gli hit –
il background è
il background si distribuisce
minimizzato
uniformemente
‘Time in frame’ (tens of ns)
3° passo: si studia il picco delle
misure di tempo ad alta
risoluzione (dalla ricostruzione
della waveform): dalla
posizione del picco rispetto ad
istante di riferimento si stima il
time offset, dalla larghezza la
risoluzione temporale
MCirce: Time calibration, Catania, 7 Dec. 2012
10
NEMO-Fase2: test pre-deployment
Rate di “singola” di 16 O.M. 5< f <8 kHz
Distrib. di carica per 1 p.e.
17/9/12
Trigger rates durante la
“calib. temporale” con laser
Antonio Capone - CSN2 - Trieste
11
Conclusioni ad oggi
Il sistema ha funzionato senza intoppi
Buona qualità dei dati: buona stima degli offsets temporali e buona verifica
della funzionalità dell’apparato
Matrice preliminare degli offsets disponibile
Lavori in corso:
Raffinamento delle stime dei tempi estratte dalla waveform
Analisi dei dati di calibrazione con impulsatori LED interni
Per il futuro:
Approccio che si potrebbe applicare alle prossime torri
Ci sono margini di ottimizzazione del sistema (diffusore ottico, supporti per
le fibre)
MCirce: Time calibration, Catania, 7 Dec. 2012
12
Cosa non è, ancora, stato possibile (con la Torre)
• Integrazione del Data Manager: run control,
storage dei dati dei PMT, acquisizione dati slow
control (bussole, sensori, strumenti
oceanografici, …), visualizzazione dei dati
• Test della trasmissione dati EFCM-Hit Manager
tramite macchina windows (per alte rates)
• Scrittura/lettura degli eventi “post-trigger”
Antonio Capone - Coll. Meeting - LNS 7/12/2012
Deployment
• 17 Novembre: Torre e ROV su nave MECMA
• ROV a 3500m (nella sua gabbia) O.K.: grande
successo !
• Il ROV esce dalla gabbia, il suo assetto risulta
leggermente negativo e non orizzontale: si decide di
recuperarlo;
• Si perde il contatto con il ROV (comunicazione
ottica), continua il recupero;
• Un corto circuito nel cavo fra gabbia e ROV brucia il
cavo ombelicale ed il ROV va sul fondo;
• Torre a Catania al laboratorio al porto.
Antonio Capone - Coll. Meeting - LNS 7/12/2012
Futuro
• Klaus investiga sulla possibilità di utilizzare altri ROV
(vedi sua presentazione);
• Lo steering committee sta valutando l’opportunità di
intervenire sulla Torre: interventi non invasivi e/o per
recuperare ad esempio la “base Torre”;
• Obiettivo: Torre a Capo Passero a primavera 2013;
• Test bench per test di singoli (o più) piani in
programma per verifica della sua funzionalità (dopo i
trasporti);
• Necessario approfittare di questo tempo per provare
ed integrare Data Manager
Antonio Capone - Coll. Meeting - LNS 7/12/2012