Polo per la Chimica e le Biotecnologie Ambientali e
Sanitarie
Istituto d’Istruzione Superiore
Ada Gobetti Marchesini – Luigi Casale
– Torino
Orientamento Formativo in collaborazione con
il Politecnico di Torino
Prof. Pietro MANTELLI
[email protected]
LEZIONE 2
Tratta da materiale didattico predisposto dal Politecnico di
Torino
Orario delle lezioni:
dal 11/11/2014 al 16/12/14
martedi -14:30 – 15:50 aula 2 lim
http://orienta.polito.it/OrientamentoFormativo.html
LEGGI DEL MOTO DI NEWTON
La meccanica newtoniana (meccanica classica) è una teoria del moto
basata sui concetti di massa e di forza definiti in modo operativo.
Osserviamo il moto di una particella a passare del tempo:
• velocità variabile: la particella interagisce con l’esterno
• velocità costante: le interazioni con l’esterno sono in equilibrio
• ferma: caso particolare di velocità costante (v=0)
“Philosophiae Naturalis Principia Mathematica.” 1687
Axiomata sive leges motus
Assiomi ovvero leggi del moto
(ai quali si da comunemente il nome di Principi della Meccanica)
PRIMO PRINCIPIO
PRINCIPIO DI INERZIA
Lex I:
“ Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter
in directu, nisi quatenus a viribus impressis cogitur statum illum mutare”.
“Ogni corpo persevera nel suo stato di
quiete o di moto rettilineo uniforme,
finché non è costretto a mutare tale
stato da una forza che gli viene
applicata”.
SF=0
v = costante
« Galileo fece un gran progresso nella comprensione del moto
quando scoprì il principio di inerzia: se un oggetto è lasciato
solo, se non è disturbato, continua a muoversi con velocità
costante in linea retta se era originariamente in movimento, o
continua a stare in quiete se era del tutto immobile. »
FEYNMAN
SECONDO PRINCIPIO
PRINCIPIO FONDAMENTALE
Lex II:
“ Mutationem motus proportionalem esse vi motrici impressæ, et fieri secundum
lineam rectam qua vis illa imprimitur”.
“La variazione del movimento è
proporzionale alla forza motrice
applicata, e avviene lungo la stessa linea
retta dell’azione della forza”.
SF=ka=ma
k = costante di proporzionalità = massa inerziale = m
Nei “Principia” non compare nessuna formulazione equivalente al nostro F = m a.
TERZO PRINCIPIO
PRINCIPIO DI AZIONE E REAZIONE
Lex III:
“ Actioni contrariam semper et æqualem esse reactionem, sive corporum duorum
actiones in se mutuo semper esse æquales et in partes contrarias dirigi.”
”L’azione è sempre eguale e contraria alla
reazione, ovvero le azioni reciproche esercitate
da due corpi sono sempre eguali e dirette in
verso opposto”.
INTERAZIONE GRAVITAZIONALE
Con quale forza la Luna è attratta dalla Terra?
Con quale forza una “mela” è attratta dalla Terra?
Perché la Luna non cade sulla Terra?
FORZA A DISTANZA
FORZA UNIVERSALE
CAUSATA DALLA MASSA
TERZA LEGGE DI KEPLERO
FORZA CENTRIPETA
Con quale forza una “mela” è attratta dalla Terra?
= m2 a
m2 = massa della mela = m
a = accelerazione della mela in caduta libera = g
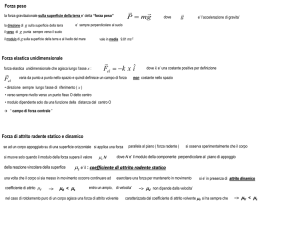
P=mg
FORZA DI GRAVITA’ = FORZA PESO = “PESO”
FORZA PESO
P=mg
Applicata nel BARICENTRO
“rivolta verso il basso”
WEIGHT = PESO = P = W
INTERAZIONE ELETTROMAGNETICA
FORZA A DISTANZA
FORZA UNIVERSALE
CAUSATA DALLA CARICA
ELETTRICA (elettroni – protoni)
Una carica elettrica FERMA genera un
CAMPO ELETTRICO STATICO
Una carica elettrica IN MOTO genera un
CAMPO ELETTROMAGNETICO
Una massa genera un
CAMPO GRAVITAZIONALE
Esempi: forze di ATTRITO – forze ELASTICHE
FORZA VINCOLARE
I VINCOLI LIMITANO LA MOBILITA’
Reazioni vincolari: forza che tende ad annullare l'azione
della forza applicata (legge di azione e reazione: stesso
modulo, ma verso opposto).
Corpo libero: il corpo può occupare qualsiasi punto
dello spazio eseguendo un qualunque spostamento in
ogni direzione.
Corpo vincolato: a causa di un qualche vincolo, risulta
impedito uno dei possibili spostamenti.
Mosca in una scatola, aereo in volo, formica sul mappamondo, boccia appesa ad un
filo, tram sui binari, molecola in una bombola, libro su un banco…
Le forze tra un oggetto e la superficie su cui poggia
Un oggetto APPOGGIATO su una superficie, preme sulla superficie stessa e
riceve una forza di reazione uguale e contraria (3°principio).
Tale forza perpendicolare alla superficie è detta forza NORMALE.
A livello microscopico questa forza è di origine elettrostatica (elettrone-elettrone)
Se il corpo è fermo in equilibrio la seconda
legge di Newton ci dice che
F 0
N W 0
N mg
In matematica e in fisica, l'aggettivo normale è spesso sinonimo di perpendicolare.
Attenzione: in generale la forza normale N non è uguale alla
forza peso!!
(a)
F 0
N W
N mg
(b)
F 0
(c) F 0
N W F 0
N mg F
N W F 0
N mg F
Nel caso di una superficie orizzontale o di una inclinata si ha il
seguente diagramma corpo libero
reazione
normale
azione
[email protected]
14
Se diamo una spinta ad un corpo su un piano orizzontale ruvido dandogli una
certa velocità iniziale, esso si muoverà lungo una linea retta con velocità
decrescente (decelerazione=accelerazione negativa). Per il primo principio:
F 0
Deve quindi esistere una forza parallela alla superficie che
provoca questa decelerazione. La forza sarà una forza
dovuta al CONTATTO libro-tavolo. Tale forza avrà
direzione parallela al piano di appoggio (stessa
dell’accelerazione) e verso opposto alla direzione del
moto. Questa forza viene detta FORZA DI ATTRITO
RADENTE (dinamico).
fd
F N W f d ma
N
F
fs
W
Ma sappiamo anche dall’esperienza che per mettere in moto un corpo
appoggiato su una superficie è necessario spingerlo, cioè applicargli una
forza F, e che se questa forza non è sufficiente il corpo non si muove.
Finché il corpo resta fermo, deve esistere una forza parallela alla
superficie che annulla la forza orizzontale con cui spingiamo. Tale
forza è la forza di attrito radente (statico) e fa sì che:
åF = N +W + F + f
s
=0
N
fs
W
F
FORZA D’ATTRITO RADENTE
• E’ sempre parallela alla superficie di contatto tra i due materiali
• Si oppone sempre al moto relativo (reale o potenziale) tra corpo e superficie
• NON dipende dall’area di contatto
• NON dipende dalla velocità
Infatti a livello microscopico il contatto
effettivo avviene soltanto in una piccolissima
frazione dell’area di contatto apparente!
ATTRITO RADENTE STATICO
Considero un oggetto fermo su una superficie scabra (=con attrito)
1) Inizio a tirarlo orizzontalmente con una forza
crescente (supponiamo, in modo lineare col tempo)
2) Finché il corpo non si muove la risultante delle
forze agente su di esso è nulla, ne consegue che la
forza di attrito (statico) ha la stessa intensità della
forza con cui tiro, e varia con essa.
fs = F
N
3) Ad un certo istante arrivo alla condizione
limite e se aumento anche di pochissimo la
forza, il corpo inizia a muoversi.
Nella condizione limite la forza di attrito è
massima.
Il valore massimo è proporzionale alla
forza normale N
fs max= sN
ATTRITO RADENTE DINAMICO
4) Quando la forza che applico diventa uguale
alla forza di attrito statico massimo, il corpo inizia
a muoversi (accelera). A questo punto scopro che
per mantenerlo in moto a velocità costante devo
ridurre un po’ la forza. Ciò significa che la forza di
attrito dinamico è minore della massima forza di
attrito statico:
N
fd = dN
con
d < s
N
Attrito statico
F
fs = F sN
Quando la forza esterna applicata è maggiore di
sN il corpo si muove ed entra in gioco l’attrito
dinamico
fs
P
N
Attrito dinamico
fd = dN
con
d < s
fd
Questa relazione è vettoriale?
No!
P
F
Se la forza che applico è più intensa di quella di attrito il corpo subisce
una accelerazione data dall’applicazione del 2° principio
åF = N + P+ f
d
+ F = ma
fd = dN
N
fd
F
P
Attenzione: il coefficiente di attrito è un numero compreso fra zero ed uno, quindi il
modulo della forza di attrito e sempre minore di quello della reazione normale della
superficie sul corpo. La lunghezza del vettore forza di attrito deve essere sempre minore
di quella della reazione normale. (sci-neve 0,05 --- gomma-asfalto 0,8)
22