Lezione XI-b
Avviare la presentazione col tasto “Invio”
1
Adesso ci proponiamo di rispondere al seguente quesito:
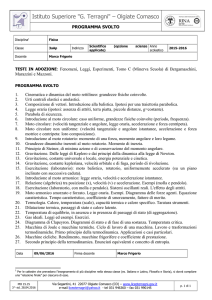
Si consideri un corpo costituito da due sfere A e B di massa m = 5kg ciascuna,
collegate da un’asta leggera ma rigida di lunghezza 1 metro, come in figura.
O
B
A
1m
Si trattino le sfere come masse puntiformi e si trascuri la massa dell’asta.
Calcolare il momento di inerzia del corpo:
a) Rispetto ad un asse ortogonale all’asta e passante per il punto centrale O
b) Rispetto ad un asse parallelo al precedente ma passante per una della due sfere
2
Avevamo visto che il concetto di momento di inerzia era stato
introdotto a proposito della formulazione dell’energia cinetica di rotazione.
Rivediamo
3
Energia di rotazione e momento di inerzia
Non c’è dubbio che ciascuna particella di cui si compone un corpo rigido in rotazione
possiede un certa energia cinetica:
Una particella di massa m di un corpo rigido situata ad una distanza r dall’asse di
rotazione del corpo rigido in questione avrà una velocità
v = ω r , dove ω è la velocità angolare del corpo rigido.
ω
r
Pertanto l’energia cinetica di questa particella sarà:
½ m v2 = ½ m ω2r2
4
Se, come stiamo supponendo, il corpo è rigido allora la velocità angolare ω è la stessa
per tutte le particelle di cui si compone, e l’energia cinetica totale
K
sarà la somma delle energie cinetiche di tutte le particelle :
K = ½ m1 ω2 r21 + ½ m2 r22 + ………….. ½ mN ω2 r2N
K = ½ ( m1 r21
+ m2 r22 + ………….. mN r2N ) ω2
K= ½
∑(m r
Il termine
∑(m r
i
i
2
2
i
i
) ω2
) che indichiamo col simbolo I è denominato Momento di Inerzia
del corpo rigido rispetto a quel particolare asse di rotazione
I =
∑(m r
i
2
i
)
5
Va sottolineato che il Momento di Inerzia di un corpo rigido dipende quindi dall’asse,
oltre che dalla forma del corpo e dalla distribuzione delle masse.
Il Momento di Inerzia
I ha dimensioni:
[ M L2 ]
e si misura in:
kg m2
Introducendo il Momento di Inerzia, l’energia cinetica di un corpo rigido in rotazione
Krot
è espressa pertanto dalla:
Krot = ½ I ω2
6
Una interessante analogia:
Moto traslatorio
Moto rotatorio
Energia cinetica
½ m v2
½ I ω2
velocità
v
ω
massa
m
I
Cosi come ω è nel moto rotatorio l’equivalente della velocità v nel moto traslatorio,
I è nel moto rotatorio l’equivalente della massa m nel moto traslatorio.
Occorre però ricordare che mentre m non dipende dalla posizione del corpo, I dipende
dal particolare asse attorno a cui avviene la rotazione
7
Nel caso in cui il corpo rigido non è costituito da un insieme finito di particelle distinte,
ma è costituito da una distribuzione continua di materia, l’operazione di somma che
compare nella formula:
I =
∑(m r
i
2
i
)
diventerà una integrazione: considereremo il corpo costituito da masse infinitesime
dm e considereremo la distanza r
fra tali masse e l’asse di rotazione:
I =
∫
r2dm
dove l’integrale è esteso sull’intero corpo
8
Nel caso di corpi di forma complicata, il
calcolo di questo integrale può essere
difficile, ma nel caso di corpi con una
geometria regolare e l’asse di rotazione
coincidente con l’asse di simmetria, il
calcolo è abbastanza semplice. Ecco di
seguito alcuni esempi:
9
Per la dinamica del moto rotatorio di un corpo rigido si definiranno pertanto una
serie di grandezze perfettamente analoghe a quelle del moto rettilineo di una particella :
Moto rettilineo di una particella
Moto rotatorio di un corpo rigido
Spostamento
x
Spostamento angolare
θ
Velocita
v = dx/dt
Velocità angolare
ω = dθ/dt
Accelerazione
a = dv /dt
Accelerazione angolare
α = dω/dt
Massa
m
Momento di inerzia
I
Forza
F = ma
Momento della forza
τ=Iα
Lavoro
∫ F dx
Lavoro
∫ τ dθ
Energia cinetica
½ m v2
Energia cinetica
½ I ω2
Quantità di moto
mv
Momento angolare
Iω
10
Riprendiamo quindi in esame il quesito:
Si consideri un corpo costituito da due sfere A e B di massa m = 5kg ciascuna,
collegate da un’asta leggera ma rigida di lunghezza 1 metro, come in figura.
O
B
A
1m
Si trattino le sfere come masse puntiformi e si trascuri la massa dell’asta.
Calcolare il momento di inerzia del corpo:
a) Rispetto ad un asse ortogonale all’asta e passante per il punto centrale O
b) Rispetto ad un asse parallelo al precedente ma passante per una della due sfere
11
Riscriviamo la formula per il momento di inerzia nel caso di masse puntiformi:
I =
∑(m r
i
2
i
)
Nel caso in cui l’asse passa per O ed è ortogonale all’asta:
5 kg
5 kg
B
A
rA = −0.5 m
O
rB = 0.5 m
I = mA rA2 + mB rB2
I = (5 kg) (0.5 m)2 + (5 kg) (0.5 m)2
I = 5 x 0.25 + 5 x 0.25 = 2.5 kg m2
12
Nel caso in cui l’asse passa per una delle due masse ed è ortogonale all’asta:
5 kg
5 kg
B
A
rA = 0
O
rB = 1 m
I = mA rA2 + mB rB2
I = (5 kg) (0 m)2 + (5 kg) (1 m)2
I = 5 x 0 + 5 x 1= 5 kg m2
13
Adesso vediamo un altro esempio di dinamica rotazionale che richiede gli stessi
concetti che abbiamo appena ripassato
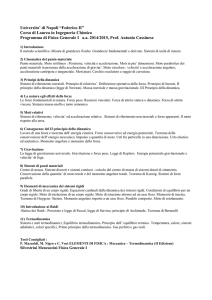
Un disco omogeneo di raggio
R e di massa M è montato su un perno e sostenuto
da supporti privi di attrito come in figura. Una cordicella priva di massa è fissata e
arrotolata attorno al disco, ed è tirata verso il basso da una tensione T
Determinare l’accelerazione angolare del disco
e l’accelerazione tangenziale in un punto sul bordo
R
T
14
Facendo riferimento ai simboli adottati, in questo caso avremo:
τ=Rx T
Essendo R e T ortogonali Il modulo di
τ = R T sin θ
sarà :
τ=RT
Il momento di inerzia
I del disco rispetto all’asse di rotazione
I = ½ M R2
è dato dalla:
e dalla relazione
si ha:
τ=Iα
I α = RT α =
𝑅𝑇
½ M R2
L’accelerazione tangenziale a vale a
2𝑇
=MR
=Rα
15
Supponiamo adesso di appendere alla corda una
massa m e di volere ricalcolare l’accelerazione
R
angolare e quella tangenziale.
T
Sia mg la forza di gravità che agisce sulla massa
e T la tensione di reazione diretta verso l’alto.
Il corpo di massa m accelera verso il basso, e la
T
m
sua accelerazione a è data dalla II Legge di Newton:
mg–T=ma
[1]
In questa formula a è anche l’accelerazione tangenziale
mg
del disco.
16
Supponiamo adesso di appendere alla corda una
massa m e di volere ricalcolare l’accelerazione
R
angolare e quella tangenziale.
T
Sia mg la forza di gravità che agisce sulla massa
e T la tensione di reazione diretta verso l’alto.
Il corpo di massa m accelera verso il basso, e la
T
m
sua accelerazione a è data dalla II Legge di Newton:
mg–T=ma
[1]
In questa formula a è anche l’accelerazione tangenziale
mg
del disco.
17
Per l’accelerazione angolare α potremo scrivere di nuovo:
τ
= Iα
RT = ½ M R2 α
T = ½ M Rα
e ricordando che
Rα = a
si ha:
T =½Ma
Riscrivendo la [1]:
m g – T = m a avremo le due equazioni:
mg–T=ma
T =½Ma
Con due equazioni e due incognite (T e
a), possiamo risolvere il quesito.
18
Momento angolare di una particella
Nella dinamica del moto rotatorio, il concetto di momento angolare (o momento
della quantità di moto) ha un ruolo simile a quello che ha la quantità di moto nella
dinamica del moto traslatorio. Vedremo che la definizione e l’applicazione di questo
concetto ci permetterà di ricavare un’altra importante Legge di conservazione.
Consideriamo una particella di massa m e quantità di moto p situata ad una distanza
r dall’origine O di un sistema di assi x-y-z.
Il momento angolare della particella
rispetto al punto O è definito dalla:
L = rxp
Cioè: il prodotto vettoriale di r per
p
19
L
y
p
r
y
z
20
In accordo con la definizione di prodotto vettoriale, il modulo di L è dato da:
L = r p sin θ
La direzione è perpendicolare al piano individuato dai due vettori r e p
Il verso è stabilito dalla consueta regola della mano destra.
Dalla definizione, che è del tutto analoga al momento di una forza, si vede che il
momento angolare
L è il momento della quantità di moto.
21
E abbiamo visto che:
𝑑𝐋
τ =
𝑑𝑡
Cioè: la derivata rispetto al tempo del momento angolare (o momento della quantità di
moto) di particella è uguale al momento delle forze applicate alla particella stessa.
22
Questa equazione:
𝑑𝐋
τ =
𝑑𝑡
è analoga alla equazione che avevamo scritto per il moto traslatorio:
𝑑𝐩
F=
𝑑𝑡
che stabiliva che la derivata rispetto al tempo della quantità di moto di una particella
è uguale alla forza che agisce su di essa, e che implicava che:
dp = F dt Δp =
∫
F(t) dt
(relazione impulso – variazione quantità di moto)
Ci aspettiamo pertanto che risulti anche che:
dL = τ dt ΔL =
∫
τ(t) dt
23
Il momento angolare di un corpo rigido è il prodotto del suo momento di inerzia
per la sua velocità angolare.
Si noti l’analogia della formula:
L= Iω
con la formula relativa al moto traslatorio:
p=mv
Risulta quindi
𝑑
τ=
Iω
𝑑𝑡
Se I = costante risulta
τ= Iα
24
Quindi, come in dinamica traslatoria si ha
F=ma
In dinamica rotatoria si ha
τ= Iα
E così come la F
=ma
poteva essere formulata nel caso più generale caso di
una massa variabile con la formula:
𝑑
𝑑
F=
(m v) =
p
𝑑𝑡
𝑑𝑡
Per il momento angolare avremo in generale:
𝑑
𝑑
τ=
(Iω) =
L
𝑑𝑡
𝑑𝑡
25
Conservazione del momento angolare
Dalla relazione precedente risulta che se :
τest
𝑑
=0
L=0
𝑑𝑡
Cioè: quando il momento risultate delle forze applicate ad un sistema è nullo, il
momento angolare è costante.
Cioè: il momento angolare di un sistema isolato è costante
QUINDI: in un sistema isolato
I ω = costante
26
Se durante il moto rotatorio cambia la distribuzione delle masse (e quindi cambia I)
cambierà di conseguenza
ω, un fenomeno largamente usato da atleti
e ballerini !!!
27
Un classico esempio: il moto di precessione di una trottola
z
L
Una trottola è un oggetto a simmetria cilindrica che
ruota attorno al suo asse di simmetria. Indicando con
ω
la sua velocità angolare e con
I
il suo momento
di inerzia rispetto all’asse, il suo momento angolare
è dato da:
y
x
L= Iω
Poiché il momento angolare di un sistema isolato si conserva, una trottola su cui
non agiscono forze esterne o attriti mantiene in eterno il suo stato di moto immutato.
28
z
Questa affermazione è vera, qualsiasi sia la direzione
L
del momento angolare
L= Iω
Quindi anche nel caso di una trottola inclinata come
in figura, il moto rotatorio continua all’infinito immutato.
y
x
Eppure l’esperienza ci insegna che se l’asse è inclinato, la trottola subisce un moto
di precessione, cioè la direzione del vettore L varia continuamente, quindi L
≠ costante.
29
Come spieghiamo questo fenomeno ?
Evidentemente nel caso reale la trottola non è un sistema isolato: su di essa agisce
la forza di gravitazione. Vediamo allora di capire cosa succede. Sia m la massa della
trottola, sia θ l’angolo dell’asse della trottola rispetto alla verticale, e consideriamo il
momento
τ
rispetto al punto di appoggio O esercitato dalla forza di gravità mg sul
baricentro della trottola, individuato da un vettore
z
L
Scriveremo:
θ
il cui modulo è:
r come in figura.
τ=rx mg
τ = r m g sin θ
La direzione di τ è ortogonale al piano individuato da r e g
Questa stessa sarà quindi la direzione della variazione di momento
r
angolare ΔL in un breve tempo Δt , in quanto risulta:
ΔL = τ Δt
mg
O
x
y
30
Risulta quindi che dopo un breve intervallo di tempo Δt il momento angolare
è diventato L +
L
ΔL
Poiché ΔL è ortogonale a L ed è supposto molto piccolo rispetto a L il nuovo
vettore momento angolare ha lo stesso modulo del vecchio ma una diversa direzione.
z
L
θ
Quindi col passare del tempo la punta della freccia del vettore L si muove lungo un
31
cerchio come in figura
Riferendoci al disegno della slide precedente, vediamo quindi di capire da quali parametri
dipende la velocità angolare di precessione ωp
z
ΔL
Δβ
L + ΔL
L
Si ha:
θ
ωp = Δβ / Δt
32
Poiché abbiamo assunto ΔL << L potremo scrivere
Δ𝐿
Δβ =
𝐿 sin θ
e poiché era :
Si ha:
E quindi :
Cioè:
=
τ Δ𝑡
𝐿 sin θ
τ = r m g sin θ
Δβ =
r m g sin θ Δ𝑡
𝐿 sin θ
ωp = Δβ /Δt
r m g sin θ Δ𝑡
rmg
=
𝐿 sin θ Δ𝑡
𝐿
per L grande, la velocità angolare di precessione è piccola
33