La trattazione delle tecnologie meccaniche parte dalla conoscenza di alcuni concetti scientifici di base, inerenti alle leggi dell’equilibrio dei
corpi, delle macchine semplici, della trasmissione e della trasformazione del moto, delle forze d’attrito, ecc. L’individuazione e la
sperimentazione di questi principi della meccanica in situazioni quotidiane, in oggetti d’uso comune, in attrezzi e macchinari con cui lavoriamo
e ci spostiamo, oltre a farci conoscere il mondo della tecnologia meccanica, ci aiuteranno concretamente a comprendere le leggi fisiche, anche
le più complesse.
1
Storia delle macchine
- Archimede di Siracusa (III sec. a.c.) studiò l’equilibrio della leva, introducendo i
concetti di peso specifico e baricentro, enunciando il principio idrostatico del
galleggiamento dei corpi.
- Erone di Alessandria sperimentò le macchine semplici e degli ingranaggi, le
applicazioni del sifone, la potenza motrice del vapore, ma solo in macchine di gioco
o belliche.
- I Romani non aggiunsero molto sul piano teorico, ma applicarono gli studi
precedenti a numerose opere e costruzioni monumentali.
Archimede
Leonardo da Vinci, progettò macchine e sistemi meccanici di sorprendente
attualità, ma non riuscì a influenzare il mondo scientifico del tempo.
Nel Rinascimento, tuttavia, si verificarono continui progressi tecnici nelle
macchine usate per l’agricoltura, nella produzione di manufatti e di energia,
nella navigazione: in tutto ciò la meccanica rivestì un ruolo di primo piano.
Nel XVII secolo numerosi scienziati si occuparono di meccanica: Galileo,
Newton, Pascal ecc.
Nel periodo della Rivoluzione industriale, con l’enorme sviluppo della tecnologia
e l’applicazione della macchina a vapore, la meccanica trovò la sua definitiva
affermazione in moltissimi ambiti operativi.
Dalle prime macchine a vapore agli attuali sistemi meccanici controllati da
computer, è stato un susseguirsi di perfezionamenti e innovazioni tecnologiche
Dalla macchina operatrice si è arrivati agli automi, in grado di sostituire l’uomo in
quasi tutte le fasi del processo produttivo.
2
Le macchine semplici
L’equilibrio
Ogni corpo, fermo o in movimento, è sottoposto in ogni istante a una serie di forze che tendono a
modificarne l’assetto: quando la risultante di tutte le forze applicate è uguale a zero,
cioè quando le forze si annullano reciprocamente, il corpo è nello stato di equilibrio.
- Il baricentro (o centro di gravità) è il punto di un corpo in cui si può immaginare concentrata la sua
forza-peso.
Le macchine semplici
Esistono dispositivi, noti fin dall’antichità, che possiamo individuare in numerose situazioni:
sono le cosiddette macchine semplici:
a. La leva
- È formata da un’asta rigida girevole attorno
ad un suo punto fisso, detto fulcro F, cui sono
applicate due forze, la forza motrice P (o
potenza) e la forza resistente R (o
resistenza).
- La distanza tra i punti di applicazione delle
forze ed il fulcro si chiama braccio
- La distanza dal fulcro alla resistenza è detta:
“braccio della resistenza” (br)
- La distanza tra la potenza e il fulcro è detta:
“braccio della potenza” (bp)
3
Le leve
In relazione alla posizione del fulcro rispetto alla potenza e alla resistenza, le leve si
possono considerare di primo, secondo o terzo genere.
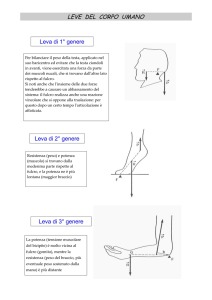
Leva di primo genere
- Il fulcro si trova tra il punto
d’applicazione della
resistenza e quello della
potenza
- Esempi: chiave inglese,
grimaldello, forbici, tenaglie,
ecc.
- Leva vantaggiosa quando il
braccio della potenza è più
lungo di quello della
resistenza
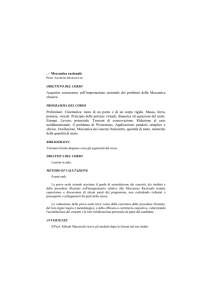
Leva di secondo genere
- Il punto di applicazione
della resistenza si trova fra il
fulcro e il punto di
applicazione della potenza
- Esempi: carriola, remo
della barca schiaccianoci,
pedale bicicletta, apribottiglia
- Sempre favorevole e
vantaggiosa.
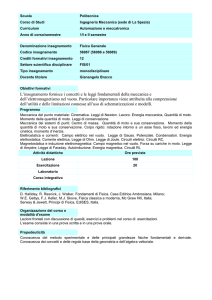
Leva di terzo genere
- Il punto di applicazione della
potenza si trova fra il fulcro e il
punto di applicazione
della resistenza
- Esempi:canna da pesca,
pinzette, molle per il camino.
-Leva sfavorevole, perché il
braccio della potenza è più
corto di quello della resistenza
- Consente però movimenti più
precisi e prolunga lo spazio di
azione.
4
Altre macchine semplici
b. Cuneo
- Prisma con sezione a
triangolo isoscele, che
penetra in un corpo, fino a
spezzarlo
- Penetrazione è facilitata
dall’aumentare della
lunghezza del lato obliquo
del cuneo
- Esempi: coltello,ferro
triangolare che spezza i
tronchi, spessore in legno
che si infila sotto una porta
per tenerla aperta
c. Vite
- Corpo cilindrico (o gambo)
su cui viene inciso un solco a
forma elicoidale
- La parte in rilievo (filetto) si
inserisce in un solco
identico, inciso all’interno
di un corpo, in modo tale che
la vite diventa un organo di
collegamento o di manovra
d. Carrucola
- Basata sulla ruota, può
essere
considerata come una leva a
bracci uguali: l’equilibrio si
ha quando F=F”.
- Esempio: sollevamento del
secchio da un pozzo.
5
Altre macchine semplici
e. Verricello e argano
- Cilindro (o tamburo) che può ruotare intorno al proprio
asse orizzontale: su questo si avvolge una fune che
solleva pesi
- L’argano è molto simile al verricello, solo che il tamburo
è disposto con l’asse in posizione verticale
- Adatto per trascinare pesi lungo un piano inclinato
Argano
f. Piano inclinato
- Superficie piana obliqua, cioè inclinata rispetto al piano
d’appoggio
- Lungo il piano inclinato è possibile tenere in equilibrio e far
scorrere grossi carichi, portandoli ad altezze notevoli senza
sforzi particolari
- Usato anche per la costruzione delle grandi piramidi egizie.
Piano inclinato di funicolare
6
La trasmissione del moto
- Numerosi sono i meccanismi realizzati per la
trasmissione meccanica di forza e movimento
- In genere sono applicazione ulteriore o
assemblaggio geniale di alcune macchine
semplici,
disposte in un certo ordine e grandezza
- Alcuni meccanismi sono originali: cinghie,
funi, catene, ingranaggi, ruote di frizione, ecc.
b. Trasmissione per legame rigido
Alberi di trasmissione
a. Trasmissione per contatto
Ruote dentate
Ruote di frizione
Trasmissione per legame flessibile
Cinghie, catene, funi
7
La trasformazione del moto
Spesso è necessario trasformare il tipo di moto per poterlo utilizzare. Esistono, al riguardo, alcuni
dispositivi che trasformano il moto rotatorio continuo dell’albero motore in moto oscillatorio e viceversa.
a. Camma
Organo dalla forma particolare, con una
prominenza eccentrica che, nel corso della
rotazione, è in grado di spostare un’asta cedente
nella direzione del suo asse: così trasforma il
moto rotatorio in moto traslatorio.
Esempio: controllo delle valvole dei motori a
scoppio e nelle macchine operatrici.
Albero a
camme
b. Sistema biella-manovella
Trasforma il moto rettilineo alternativo in moto rotatorio
continuo,
- La biella è un collegamento rigido, a forma di asta, che
unisce fra loro due manovelle o una manovella e un pattino.
- La manovella è in grado di ruotare intorno a un centro ed è
collegata a una biella mediante uno snodo (testa di biella).
La biella è collegata, a sua volta, con un elemento che scorre
in una guida rettilinea.
- Esempi: motore a scoppio delle automobili, o trasformazione
in moto rettilineo della pedalata in rotazione della stella nella
bicicletta.
Biella
Manovella
8
L’industria meccanica
Produce beni di consumo finali, semilavorati e molti degli stessi mezzi di produzione (macchine utensili e
macchine per lavorare materiali, ecc.).
- Il progettista si avvale dei sistemi di CAD (Computer Aided Design, progettazione assistita dal
computer), che semplificano il disegno progettuale
- I reparti di produzione sono organizzati per isole produttive, interamente gestite da robot e governate
da computer di controllo
- Ogni singola macchina può eseguire più operazioni, prima affidate a macchine diverse, costituendo un
sistema di produzione flessibile
- Automatizzate le attività di montaggio, saldatura, verniciatura, misura e controllo.
I sistemi meccanici
- Comprendono anche componenti
elettrici ed elettronici
Tre funzioni fondamentali:
a. Funzione motrice (Fm), che indica la
generazione di potenza meccanica;
b. Funzione di trasmissione e
trasformazione (Ft) per adattare la
potenza alle esigenze del sistema;
c. Funzione operatrice o utilizzatrice
(Fo) completa, in pratica, il sistema.
- Le funzioni possono svolgersi in modo
sequenziale, secondo uno schema
aperto, oppure essere connesse tra loro
con un collegamento a ciclo chiuso.
9
La robotica
Dai primi semplici meccanismi e trappole utilizzati per cacciare gli animali della foresta, agli splendidi
automi del XVII secolo, per arrivare alle macchine automatiche (il telaio Jacquard, ad esempio) della
Rivoluzione industriale e alla robotica.
Obiettivi:
- Imitare il comportamento dell’uomo in un meccanismo
qualunque
- Rendere il meccanismo automatico, svincolandolo dal controllo
diretto dell’uomo.
Il robot
- Karel Capek, inventò il termine robot, derivante dalla parola
“robota” che, in cecoslovacco, significa “lavoro forzato”.
-Per robot oggi si intende un sistema automatico che può
sostituirsi all’uomo nel compiere un lavoro
- lavora seguendo le istruzioni impartite dall’uomo (mediante
un “programma”) e agisce anche senza il suo diretto controllo.
- In alcuni casi al robot si conferiscono sembianze umane (con
testa, mani, braccia e gambe),
- i robot industriali non hanno per nulla l’aspetto umano.
La robotica si occupa dello studio e della progettazione
di sistemi e dispositivi automatici, in cui l’elettronica trova larga
applicazione, insieme alla meccanica.
10
Come funziona un robot
- La struttura di un robot è assimilabile a uno scheletro, resistente e indeformabile, che regge i motori
e gli elementi speciali per la trasmissione e la trasformazione del movimento (cinghie, ingranaggi,
ecc.) e per la raccolta di informazioni (sensori).
- Grande importanza, oltre al motore, hanno gli elementi di rilevamento,controllo e azione, collegati tra
loro da sistemi di trasmissione meccanica. Tra gli elementi principali ricordiamo:
a. Sensori
I sensori e i rivelatori sono strumenti costituiti da componenti
meccanici, elettrici o elettronici, usati nei sistemi di controllo per
rilevare la presenza di qualcosa e per misurare una grandezza
fisica o i suoi cambiamenti. Ad esempio, un sensore tattile
informa del tocco di una superficie o di un oggetto.
b. Trasduttori
Trasformano una grandezza fisica in un’altra, ad esempio:
- una forza o una pressione in una tensione elettrica;
- un tipo di energia, come calore, luce o energia acustica,
in energia elettrica;
- fotodiodi, fototransistori, fotoresistenze, per la luce;
- microfoni, per l’energia acustica;
- energia elettrica in energia sonora (altoparlante).
Robot con
sensore a
telecamera
c. Rivelatori
Strumento in grado di scoprire o evidenziare un evento,
una sostanza, un oggetto o un essere vivente (rivelatori di
fiamma, di fughe di gas, di presenza di persone, ecc.).
11
Programmazione e controllo dei robot
- Per fornire l’automatismo operativo è necessaria un’azione di programmazione e controllo dei
movimenti del robot.
- È necessario programmare, in un linguaggio comprensibile dalla macchina, l’ordine preciso delle
operazioni da compiere, i movimenti, la quantità di potenza da applicare, ecc.
- Inoltre, quando il sensore rileva un’anomalia, il programma deve indicare alla macchina se
segnalarla, se fermarsi o compiere un intervento per risolvere il problema.
La meccatronica
- La meccanica è sempre più
integrata con le parti
elettroniche: si parla di
meccatronica, scienza che
prepara ingegneri e tecnici
conoscitori delle leggi e delle
tecnologie meccaniche, ma, al
tempo stesso, abili
programmatori informatici e
conoscitori dei circuiti elettronici.
- I settori di impiego, ad esempio,
sono la centralina di una
moderna automobile o un
robot inserito in una catena di
montaggio.
1212
12