Il moto armonico
• Altro esempio interessante di moto è quello armonico caratterizzato dal
fatto che l’accelerazione è proporzionale all’opposto della posizione:
a=-w2x
con w una costante positiva (s-1)
• L’equazione differenziale caratteristica del moto armonico è:
d 2x
2
w
x
2
dt
x è la posizione del punto materiale
L’accelerazione è nulla nell’origine e diventa
sempre più grande, sempre diretta verso
l’origine, man mano che ci si allontana da essa
a2
x2
a1
O
x1
La ricerca della soluzione dell’eq. diff. è un po’ più complicata che negli
altri casi, ma ci si può arrivare aggirando l’ostacolo
G.M. - Informatica B-Automazione 2002/03
Il moto armonico
• Andiamo cercando una funzione del tempo, x(t), tale che la sua derivata
seconda rispetto al tempo sia uguale alla stessa funzione x(t), cambiata
di segno e moltiplicata per una costante positiva.
• Tra le funzioni che conosciamo, le funzioni senq e cosq hanno la
proprietà che la loro derivata seconda rispetto a q è uguale all’opposto
della funzione stessa.
2
d
senq d dsenq d
• Infatti:
cos q senq
2
dq
dq
dq
dq
d cos q d dcos q d
senq cos q
2
dq
dq dq
dq
2
• Le funzioni seno e coseno potrebbero farci comodo.
• Le funzioni seno e coseno sono funzioni dell’angolo
• A noi servono delle funzioni del tempo:
– Possiamo provare con le funzioni sen(k1t) e cos(k2t), k1 e k2 due costanti
aventi dimensioni di un tempo alla meno uno, così che moltiplicate per t
danno un numero puro che è compatibile come argomento delle funzioni
seno e coseno.
G.M. - Informatica B-Automazione 2002/03
Il moto armonico
• Proviamo:
d 2 sen k1t d d sen k1t d
2
k
cos
k
t
k
2
1
1
1 sen k1t
dt
dt
dt
dt
2
d cos k 2t d dcos k 2t d
2
k
sen
k
t
k
2
2
2 cos k 2t
2
dt
dt
dt
dt
• le funzioni sen(k1t) e cos(k2t) sono soluzioni dell’equazione differenziale
del moto armonico se k1=k2=w
2
d x
2
w
x
2
dt
w = pulsazione angolare
ha le dimensioni rad/s
• Possiamo dunque scrivere l’integrale generale dell’equazione
differenziale del moto armonico nella forma:
x(t) a senwt bcoswt
• Le costanti reali a e b ci consentono di determinare le infinito alla due
soluzioni dell’equazione differenziale del moto armonico.
G.M. - Informatica B-Automazione 2002/03
Il moto armonico
• È meglio riscrivere l’integrale generale in una forma leggermente
diversa:
x(t) a senwt bcoswt
• Scegliamo A e j in modo che:
• L’integrale generale diventa:
A a 2 b2
a A senj
a b A cos j
j ar cot an
b
x(t) Asen jsenwt Acosj coswt Acos(wt j)
x(t) A cos(wt j)
• Poiché il cos(wt+j) varia tra -1 e 1, x(t) varia
tra -A e A
• A si chiama Ampiezza del moto
• wt+j si chiama fase del moto
• j è la fase iniziale: il valore della fase
quando t=0
Ampiezza
Fase
x(t) A cos(wt j)
Fase iniziale
G.M. - Informatica B-Automazione 2002/03
Il moto armonico e la fase
x(t) A cos(wt j)
v x (t) Awsen( wt j)
wt j 0
wt j
2
wt j
3
wt j
2
xA
vx 0
-A
A
vx
x0
v x wA
O
-A
O
A
-A
O
A
O
A
xA
vx 0
vx
x0
vx wA
-A
G.M. - Informatica B-Automazione 2002/03
Il moto armonico è periodico
• Il punto materiale ripassa ad intervalli regolari, dopo ogni periodo T, per
la stessa posizione.
• Cerchiamo l’intervallo T imponendo che la posizione del punto
materiale all’istante t+T sia la stessa che aveva all’istante t:
x(t T) x(t)
A cos(w(t T) j) A cos(wt j)
• Noi vogliamo anche che anche la velocità sia la stessa:
v x (t)
dx(t) dA cos(wt j)
Awsen(wt j)
dt
dt
wT 2
v x (t T) v x (t)
Aw sen(w(t T) j) Aw sen(wt j)
Le due condizioni si
verificano se:
2
T
w
G.M. - Informatica B-Automazione 2002/03
Il moto armonico - le condizioni iniziali
• I valori dell’Ampiezza e della Fase iniziale si determinano in base alle
condizioni iniziali
• Supponiamo che x(t=0s)=xo
• e che la velocità a t=0s sia uguale a vox.
• All’istante di tempo t=0:
x(t 0s) A cos(j) x o
v x (t 0s) Aw sen(j) v xo Asen( j)
• Quadrando e sommando:
A cos (j) sen (j)
2
2
2
1
A cos(j) xo
x 2o
A cos (j) A sen (j)
2
v2xo
2
w
• Dividendo membro a membro la
seconda per la prima:
2
2
2
x 2o
v2xo
2
w
vx o
w
v2xo
A
2
w
v xo
v xo
w
tan g(j)
xo
wx o
2
xo
G.M. - Informatica B-Automazione 2002/03
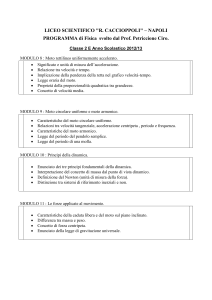
Il moto armonico il grafico orario
x(t) A cos(wt j)
T
con j 0
x(t) A cos(wt)
v x (t) Awsen( wt)
a x (t) Aw cos(wt) w x(t)
2
2
G.M. - Informatica B-Automazione 2002/03
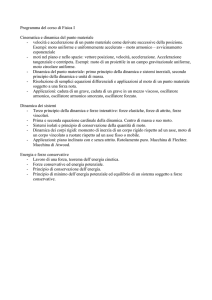
Il moto alternativo del pistone all’interno del cilindro è approssimativamente
armonico. Scrivere la legge oraria del pistone sapendo che il motore compie
3000 giri al minuti, che la corsa del pistone è di 10 cm, in un sistema di
riferimento avente origine a metà della corsa del pistone e supponendo di far
partire la misura dei tempi quando il pistone si trova a metà corsa andando
verso destra.
x(t) A cos(wt j)
O
Appli
cazio
ne
x
• Legge oraria del moto armonico quando l’origine del sistema di
riferimento si trova nel centro delle oscillazioni
– Questo è anche il nostro caso
– Dobbiamo determinare A,w e j.
– A è uguale a metà della corsa (A=5cm)
– Per trovare w osserviamo che ogni giro del motore il pistone si
riporta nella stessa posizione. Valutiamo quanto dura un giro del
motore questo sarà il periodo del moto armonico
– jlo valutiamo sulla base delle condizioni iniziali
G.M. - Informatica B-Automazione 2002/03
•
Dobbiamo determinare la durata di un giro dell’albero motore.
3000giri : 60s 1giro : T
•
Il legame tra il periodo e la pulsazione angolare w nel moto armonico è
dato da:
2
2 2 3.14
rad
T
•
60s
T
0.02s / giro
3000giri
w
w
T
314
0.02s
Appli
cazio
ne
s
La legge oraria e la velocità diventano:
x(t) 5cm cos(314s1 t j)
1
1
v x (t) 5cm 314s sen(314s t j)
•
•
Dobbiamo valutare j, sulla base delle condizioni iniziali,
A t=0, xo=0m, mentre vxo è positiva (il pistone si sta muovendo nella
direzione positiva dell’asse delle x)
dalla prima equazione:
x(0s) 5cm cos(j) 0
v x (0s) 5cm 314s
•
1
j
sen(j) 0
3
,
2 2
La seconda soluzione è quella compatibile con una velocità positiva
1
x(t) 5cm cos(314s t 3 2 )
G.M. - Informatica B-Automazione 2002/03
Moto in tre dimensioni
• Traiettoria: luogo di punti via via
occupati dal punto materiale
• La posizione del punto materiale viene
individuato dal vettore posizione
• Il vettore posizione rappresenta lo
spostamento a partire dall’origine per
raggiungere la posizione del punto
materiale
• Legge oraria: posizione in funzione del
tempo.
• Le componenti cartesiane del vettore
x x(t)
Equaz.
posizione sono le coordinate del
r r(t) y y(t) parametriche
punto materiale
della
• Il moto nello spazio è la
z z(t)
traiettoria
composizione di tre moti rettilinei
r (t) x(t)i y(t) j z(t)k
dei punti proiezione sugli assi
coordinati
G.M. - Informatica B-Automazione 2002/03
La velocità vettoriale media
• Lo spostamento del punto materiale in Dt
Dr r t Dt r t
• Si definisce velocità media nell’intervallo Dt
Dr rt Dt r t
vm
Dt
Dt
• Se il punto materiale nell’intervallo Dt viene
costretto a muoversi con la velocità media,
allora si muoverà sul segmento che connette il
punto P(t) al punto P(t+ Dt)
• La descrizione del moto non è accurata
• Un miglioramento si ottiene se si scelgono
intervalli più piccoli
G.M. - Informatica B-Automazione 2002/03
La velocità vettoriale istantanea
• Si fissa l’istante t
• Si fissa un intervallo Dt maggiore di zero
• Si calcola la velocità media nell’intervallo Dt
Dr rt Dt r t
vm
Dt
Dt
• Si definisce la velocità istantanea come
v lim Dt 0
r t Dt r t dr
Dt
dt
t
• La velocità vettoriale tende ad assumere la
direzione tangente alla traiettoria nel punto
P(t).
• Il verso è quello del moto.
• La velocità vettoriale è la derivata del
vettore posizione valutata all’istante t.
Attenzione è la
derivata di un vettore
G.M. - Informatica B-Automazione 2002/03
La velocità riferita alla traiettoria
• Indichiamo con Ds il percorso effettuato sulla
traiettoria dal punto materiale.
• Osserviamo che per Dt 0 anche Ds 0
• La velocità media può essere scritta:
Dr Ds Dr
vm
Dt Dt Ds
Ds
è la velocità scalare media in Dt
Dt
• Il limite per Dt che tende a zero ci darà la velocità scalare istantanea.
Ds
v lim Dt0
è la velocità scalare istantanea
Dt
• Supponiamo di poter calcolare il limite del
rapporto incrementale nel seguente modo:
Dr
Ds
Dr
v lim Dt0
lim Dt0 lim Ds 0
Dt
Dt
Ds
modulo
direzion e
e v erso G.M. - Informatica B-Automazione 2002/03
La velocità riferita alla traiettoria
• Osserviamo che
lim Ds 0
Dr
1
Ds
• La lunghezza dell’arco, per Dt, o Ds che tende
a zero diventa uguale alla lunghezza della
corda
Dr è un vettore di modulo
lim Ds 0
unitario (versore)
Ds
• Abbiamo già osservato che lo spostamento, per Dt che tende a zero, si
dispone lungo la direzione della tangente alla traiettoria nel punto
considerato nel verso del moto.
Dr
ut versore tangente
lim Ds 0
= ut
• Quindi possiamo porre
Ds
• La velocità istantanea può essere scritta:
v vut
G.M. - Informatica B-Automazione 2002/03
Il moto in tre dimensioni
• La lezione non è completa
• Fare riferimento alle “Dispense del corso di Fisica
Generale per Ing. Edile”
G.M. - Informatica B-Automazione 2002/03