Il corpo rigido
• È un particolare sistema di punti materiali in cui le distanze, tra due
qualunque dei suoi punti, non variano nel tempo
– un corpo rigido non subisce alcuna deformazione anche se sottoposto a
sollecitazioni estremamente elevate. Il corpo rigida conserva la sua forma.
• I corpi solidi possono, in prima approssimazione, essere considerati
rigidi.
– Il corpo rigido è un’astrazione: in natura non ci saranno mai corpi
perfettamente rigidi
– Ci saranno corpi il cui comportamento, in particolari condizioni, può
essere descritto come quello di un corpo rigido.
– Un corpo rigido non può avere moti caratterizzati da una variazione delle
dimensioni del corpo stesso (vibrazioni, maree, etc.)
continuo
n
i 1
discreto
n numero di punti
tuttoil corp o
Infiniti punti
G.M. - Informatica B-Automazione 2002/03
Le equazioni a disposizione
• Corpo rigido = sistema di punti materiali:
• I e II legge della dinamica dei sistemi.
dP
R est
dt
dL o
M est
o
dt
• Due equazioni vettoriali
– Equivalenti a sei equazioni scalari
• Poiché le distanze tra due punti qualsiasi di un corpo rigido si mantengono
costanti
– Il lavoro delle forze interne è nullo.
• Il teorema delle forze vive diventa:
K W
est
G.M. - Informatica B-Automazione 2002/03
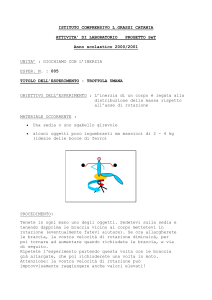
La terna solidale
• E’ una terna con origine in un particolare punto del corpo rigido e assi
che passano per punti fissi del corpo rigido
y’
corpo rigido
O’
P
Terna solidale
L’asse z’ è
perpendicolare alla
figura uscente dal
foglio.
x’
• Ogni punto del corpo rigido, proprio per la definizione del corpo rigido,
occupa una posizione fissa in questa terna.
• Descrizione del moto di un CR:
– trovo la posizione di tutti i punti del CR all’istante di tempo iniziale to
rispetto alla terna solidale (questa posizione è costante modulo direzione e
verso)
– trovo la posizione della terna solidale in un istante successivo t.
– Utilizzando la posizione di ciascun punto del CR rispetto alla terna solidale
determinata all’istante iniziale, posso determinare la posizione di ciascun
G.M. - Informatica B-Automazione 2002/03
punto all’istante t.
I moti del corpo rigido: la traslazione
y’
• Traslazione
– Le orientazioni degli assi della terna solidale
rimangano costanti (gli assi si muovono
mantenendosi paralleli a se stessi)
– Tutti i punti del corpo rigido subiscono lo
stesso spostamento nello stesso intervallo di
tempo
• Spostamento che è lo stesso di quello subito
dal centro di massa
• Tutti i punti sono fermi rispetto al centro di
massa
– È sufficiente determinare il moto del centro di
massa, utilizzando la I equazione cardinale
della dinamica dei sistemi.
P
CM
O’
L CM 0
x’
v P v CM
r' m v'
i
i
i
dP
R est
dt
– La II equazione richiede che il momento
risultante valutato rispetto al centro di massa dL CM M est
CM
sia nullo.
dt
M est
CM 0
LCM 0
G.M. - Informatica B-Automazione 2002/03
I moti del corpo rigido: la rotazione
y’
• Rotazione
P
– Le orientazioni degli assi della terna solidale non
rimangono costanti
– Esiste un insieme di punti, allineati su una retta,
che rimangono fermi
• Asse di rotazione (asse fisso)
• L’asse z’ nel caso dell’animazione
O’
x’
– Tutti i punti si muovono su traiettorie circolari
attorno all’asse di rotazione
• Il piano della traiettoria è perpendicolare all’asse
di rotazione
• Il centro della traiettoria circolare è il punto
comune dell’asse di rotazione e del piano della
traiettoria
– Tutti i punti subiscono lo stesso spostamento
angolare nello stesso intervallo di tempo
– Tutti i punti si muovono con la stessa velocità ed
accelerazione angolare rispetto all’asse di
rotazione
y’
= d
dt
= d
dt
P
O’
x’
G.M. - Informatica B-Automazione 2002/03
I moti del corpo rigido: la rotazione
• Rotazione
y’
– La velocità di ciascun punto è tangente alla
traiettoria circolare
– Il modulo della velocità è proporzionale alla
distanza del punto considerato dall’asse di
rotazione
P
v
v R
O’
– Anche l’accelerazione tangenziale è
proporzionale alla distanza dall’asse di
rotazione
x’
a t R
– Così come lo è l’accelerazione centripeta
ac R
2
G.M. - Informatica B-Automazione 2002/03
•
•
•
•
•
•
•
Un volano di diametro di 1.20 m gira a velocità angolare di 200giri/min
Qual è la sua velocità angolare in rad/s?
Qual è il modulo della velocità lineare di un punto del bordo del volano?
Qual è l’accelerazione centripeta di un punto sul bordo del volano?
Qual è l’accelerazione angolare costante necessaria per portare a 1000 giri/min
in 60 s la velocità angolare del volano?
Qual è l’accelerazione tangenziale di un punto del bordo del volano?
Quanti giri compirà in questi 60 s?
diametro
R
.60m
2
Applica
zione
200giri 200 2 rad
20.9 rad
s
min
60s
m
v R 20.9 rad
s .60m 12.55 s
m
a c 2 R 20.9 rad
.60m
262.1
s
2
2
s
f
1000giri 1000 2 rad
104.7 rad
s
min
60s
o t
f o 104.7 20.9
1.397 rad
2
s
t
60
m
rad
a t R 1.397 2 .60m .84 2
s
s
G.M. - Informatica B-Automazione 2002/03
•
•
•
•
•
•
•
Un volano di diametro di 1.20 m gira a velocità angolare di 200giri/min
Qual è la sua velocità angolare in rad/s?
Qual è il modulo della velocità lineare di un punto del bordo del volano?
Qual è l’accelerazione centripeta di un punto sul bordo del volano?
Qual è l’accelerazione angolare costante necessaria per portare a 1000 giri/min
in 60 s la velocità angolare del volano?
Qual è l’accelerazione tangenziale di un punto del bordo del volano?
Quanti giri compirà in questi 60 s?
o ot 12 t
Applica
zione
2
o ot 12 t 2
20.9 60 12 1.397 602 1254 2414
3668rad
3668rad
giro
583.79giri
2rad
G.M. - Informatica B-Automazione 2002/03
I moti del corpo rigido: la rotatraslazione
• Rototraslazione
y’
P
– In generale il moto di un corpo rigido sarà la
composizione di un moto di traslazione
– più un moto di rotazione
• Attenzione: non è detto che l’asse di rotazione si
mantenga fisso
• Esso può cambiare sia in posizione che in
orientazione
O’
x’
– Un moto comunque complesso può sempre
essere immaginato come la sovrapposizione
del moto del CM (I equazione cardinale)
– Più un moto di rotazione attorno al centro di
massa (II equazione cardinale)
– Noi non affronteremo il caso generale
• Ci occuperemo del moto di rotazione attorno ad
un asse fisso
• Moto di puro rotolamento (il moto delle ruote)
G.M. - Informatica B-Automazione 2002/03
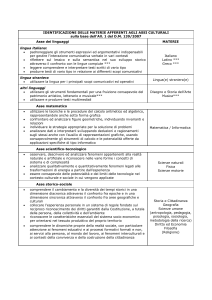
I gradi di libertà del corpo rigido
•
•
Le equazioni a disposizione sono sufficienti a risolvere il moto del corpo
rigido?
Quante coordinate ci servono per individuare la posizione del corpo rigido
nello spazio?
– Abbiamo detto che la posizione nello spazio di un CR è determinata se conosciamo
la posizione nello spazio della terna solidale!
•
y’ P
2
Osserviamo che per conoscere la posizione della
terna basta fornire le posizioni dell’origine O’ del
punto P1 sull’asse x’ e del punto P2 sull’asse y’.
– Con questi tre punti si determinerà la posizione
dell’origine e i due assi x’, y’.
– L’asse z’ sarà automaticamente determinato dovendo
passare per l’origine ed essere perpendicolare agli
altri due.
•
•
Occorrono dunque nove coordinate (tre per ciascun
punto)
Ma i tre punti non sono liberi di assumere delle
posizioni arbitrarie
– Facendo parte del CR le loro mutue distanze devono
restare costanti!
CM
O’
P1 x’
x1 x2 y1 y2 z 1 z2 d21 2
x1 xo 2 y1 yo 2 z 1 zo 2 d21o
2
2
2
2
xo - Informatica
y 2 yoB-Automazione
d 2o
x 2 G.M.
z 2 z o 2002/03
2
2
2
I gradi di libertà del corpo rigido
•
•
Esistono quindi tre relazioni tra le nove coordinate dei punti O’, P1 e P2.
Quindi solo sei di esse possono essere scelte in maniera indipendente.
– Una volta scelte le prime sei le ultime tre vengono determinate dalle relazioni tra le
coordinate.
•
I gradi di libertà di un corpo rigido, ossia le coordinate indipendenti sono solo
sei (nove complessive meno tre relazioni)
y’ P
•
2
D’altro lato abbiamo a disposizione 6 equazioni
– La prima e la seconda equazione cardinale
•
•
CM
Sei equazioni e sei coordinate da determinare
Dovrebbero essere sufficienti per descrivere il moto
di un corpo rigido.
O’
P1 x’
x1 x2 y1 y2 z 1 z2 d21 2
x1 xo 2 y1 yo 2 z 1 zo 2 d21o
2
2
2
2
xo - Informatica
y 2 yoB-Automazione
d 2o
x 2 G.M.
z 2 z o 2002/03
2
2
2
Moto di rotazione attorno ad un asse fisso:
determinazione dell’energia cinetica
• Consideriamo un corpo rigido discreto (fatto da n punti materiali) in
rotazione attorno ad un asse fisso.
• Tutti i punti si muovono attorno all’asse con la stessa velocità angolare.
• Consideriamo l’i-esimo punto materiale.
– Il mdulo della sua velocità:
v i Ri
z
• La sua energia cinetica:
vi
P
i
1
1
1
2
2 2
2 2
K i m i v i m i R i m i R i
2
2
2
P'
i
• L’energia cinetica di tutto il sistema:
n
K
i1
n
n
1
m i R 2i
2 i1
2
Ki
n
1
m iv 2i
2
i1
i1
Ri
i
1
m iR 2i 2
2
O
ri
y
x
Momento di inerzia
G.M. - Informatica B-Automazione 2002/03
Il momento di inerzia di un corpo rigido
rispetto all’asse di rotazione
mi = massa della i-esima particella
Ri = distanza dell’i-esima particella
dall’asse di rotazione
n
I
m i R2i
i1
•
I ML2
SI : kgm 2
•
Il momento di inerzia dipende dalle masse dei punti che costituiscono il corpo
rigido
Ma soprattutto dalla distribuzione della massa attorno all’asse di rotazione
•
Per i corpi continui:
I
dm R
2
dm=rdV
R = distanza dell’elemento dV
dall’asse di rotazione
tutto il co rpo
dI dm R
2
dm = massa contenuta
nell’elemento infinitesimo dV
I
dI
tutto il corp o
Per un corpo rigido in rotazione
attorno ad un asse fisso,
l’energia cinetica è data da:
K
1 2
I
2
G.M. - Informatica B-Automazione 2002/03
Momento di inerzia di un punto
materiale di massa M
• Consideriamo la situazione in figura:
• Applichiamo la definizione:
M
R
1
I
m i R2i MR2
i1
G.M. - Informatica B-Automazione 2002/03
Momento di inerzia di un anello omogeneo di
massa M e raggio R rispetto al proprio asse
• Consideriamo la situazione della figura:
• Supponiamo che l’anello ruoti attorno un asse,
perpendicolare all’anello passante per il suo centro (asse
dell’anello).
M
l
• Indichiamo con l la densità lineare dell’anello:
M
R
2R
• Consideriamo un elemento dell’anello: d Rd
•
M
M
Rd
d
a cui corrisponde la massa: dm ld
2R
2
y
R
d
d
x
• Applichiamo la definizione di momento di inerzia per i corpi
continui:
M 2 2
M 2 2 M 2
2
M
I
R d
R 0
R 2 0 MR 2
2
2
I dm R
dR
2
2
2
0
anello
0 2
• I=MR2 come se la massa dell’anello fosse concetrata in un
punto materiale a distanza R dall’asse.
G.M. - Informatica B-Automazione 2002/03
Momento di inerzia di un disco omogeneo di
massa M e raggio R rispetto al proprio asse
• Consideriamo la situazione di figura:
• Supponiamo che il disco ruoti attorno un asse, perpendicolare
al disco passante per il suo centro (asse del disco).
M
s
• Indichiamo con s la densità superficiale del disco:
R 2
• Suddividiamo il cerchio in tante corone circolari infinitesime
e concentriche di spessore dr. A tutti gli effetti può essere
considerato un anello di massa:
M
2M
dm sdS
R
2
2rdr
R
2
rdr
• a cui corrisponde un momento di inerzia:
dI dmr
2
2M 3
2 r dr
R
• Applichiamo la definizione di momento di inerzia per i corpi
continui:
I
dI
corp o
R
0
R
4
2M 3
2M r 4 2M
R
0
1 MR2
r
dr
2
R2
R 2
2
4
0 R 4
G.M. - Informatica B-Automazione 2002/03
Momento di inerzia di un cilindro omogeneo
di massa M e raggio R e altezza h rispetto al
proprio asse
• Consideriamo la situazione di figura:
• Supponiamo che il cilindro ruoti attorno al proprio asse.
M
• Indichiamo con r la densità del cilindro:
r
M
R
R
R h
2
• Suddividiamo il cerchio in tanti strati infinitesimi
infinitesime di altezza dz. A tutti gli effetti ogni strato può
essere considerato un disco di massa:
dm rdV
M
M
2
R
dz
dz
2
R h
h
• a cui corrisponde un momento di inerzia:
dI
1
1M
2
2
dmR
dzR
2
2 h
h
• Applichiamo la definizione di momento di inerzia per i corpi
continui:
h
I
dI
corp o
• Come il disco
0
z
M
R
R
z=h
z+dz
z
z=0
1M 2
1 M 2 h 1M 2
1
R dz
R z0
R h 0 MR 2
2 h
2 h
2 h
2
G.M. - Informatica B-Automazione 2002/03
Sbarra di lunghezza L e massa M ruotante
rispetto ad un asse passante per un estremo
• Consideriamo la situazione della figura:
• Supponiamo che la sbarra ruoti attorno un asse,
perpendicolare alla sbarra passante per un suo
estremo.
M
• Indichiamo con l la densità lineare della sbarra. l
L
M
L
l
M
L
z
• Introduciamo un sistema di riferimento come in figura
• Suddividiamo la sbarra in elementi infinitesimi di
lunghezza dx,
– indichiamo con x la coordinata del primo estremo
dell’elemento infinitesimo
– La distanza dell’elemento infinitesimo dall’asse di
rotazione sarà proprio il valore assoluto di x.
L
R=x
x
x+dx
dm ldx
M
x
M
dx
L
L
3
M L2
M x3
M
L
1
2
2
0
ML 2
I dmR ldx x
x dx
L 0
L 3 0 L 3
3
sbarra
0
L
G.M. - Informatica B-Automazione 2002/03
Sbarra di lunghezza L e massa M ruotante
rispetto ad un asse passante per il centro
• Consideriamo la situazione della figura:
• Supponiamo che la sbarra ruoti attorno un asse,
perpendicolare alla sbarra passante per il suo centro.
M
• Indichiamo con l la densità lineare della sbarra. l
l
L
• Introduciamo un sistema di riferimento come in figura
• Suddividiamo la sbarra in elementi infinitesimi di
lunghezza dx,
M
L
M
L
z
M
L R=|x|
L
2
x x dx
x
L
2
– indichiamo con x la coordinata del primo estremo
dell’elemento infinitesimo
– La distanza dell’elemento infinitesimo dall’asse di
rotazione sarà proprio il valore assoluto di x.
L
M
I* dmR
ldx x
L
sbarra
L 2
2
2
2
L
3
3
M x 2 M
L
L
1 ML2
x dx
L 3 L
L 3 8 3 8 12
L 2
L
2 2
3
2
G.M. - Informatica B-Automazione 2002/03
Tabella riassuntiva
G.M. - Informatica B-Automazione 2002/03
Il teorema di Steiner
• il momento di inerzia di un corpo
rispetto ad un asse qualunque è uguale
alla somma
– del momento di inerzia rispetto ad un
asse parallelo al primo ma passante
per il centro di massa
– e di un termine pari al prodotto della
massa totale del corpo per la distanza
al quadrato tra i due assi:
I I * Mh
2
y’
y
yi
y’i
mi
R’i
Ri
P
h
CM x’
i
b
a
xi
x’
x
x i x' i a
y i y' i a
G.M. - Informatica B-Automazione 2002/03
Il teorema di Steiner
• Dimostriamo per un CR discreto:
yi
Distanza del punto i-esimo dall’asse
di rotazione passante per il CM
R i xi y i
Distanza del punto i-esimo dall’asse di
rotazione passante per il punto P
2
2
2
2
2
n
IP
n
m i R2i
i1
m i x 2i
y2i
Ri
m x' a y' b
2
i
P
2
i
i
h
CM x’
i
b
a
xi
x’
y i y' i a
m i x' i m i y' i m i a m i b 2m iax' i 2m i by' i
2
2
2
x
x i x' i a
n
y’i
R’i
i1
mi
i1
n
y
R' i x' i y' i
2
y’
2
i1
n
m i x' i y' i
i1
2
2
n
2
2
m i a b 2a
i1
n
n
m i x' i 2b
m i y' i ICM Mh
2
i1
i1
Mx' CM 0
G.M.
- Informatica B-Automazione 2002/03
My'
CM 0
Verifica del teorema di Steiner
• Momento di inerzia di una sbarra rispetto
all’asse della sbarra
• Momento di inerzia di una sbarra rispetto
ad un asse passante per un estremo
1
2
I* ML
12
M
L
l
M
L
M
1
2
I ML
3
L
l
M
L
• Verifica del teorema di Steiner
1
1
1
13
4
1
L
I I * Mh ML2 M ML2 ML 2
ML2 ML2 ML2
2 12
12
4
12
12
3
2
2
G.M. - Informatica B-Automazione 2002/03
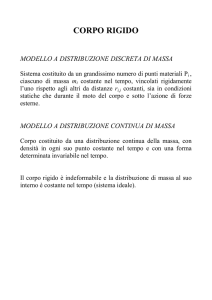
•
•
•
Ciascuna delle tre pale del rotore di un elicottero, mostrate in figura , è lunga
5.20m ed ha una massa di 240 kg
Qual è il momento di inerzia del rotore rispetto all’asse di rotazione? (le pale
possono essere considerate come asticelle sottili)
Qual è l’energia cinetica rotazionale del rotore alla velocità angolare di 350
giri/min?
Applica
zione
1
1
2
2
2
I p ala ML 240kg 5.20 2163.2kgm
3
3
I ro tore 3Ip ala 3 2163.2kgm 2 6489.6kgm 2
K
350giri 350 2 rad
36.6 rad
s
min
60s
1 2 1
2
I 6489.6 36.6 4.34MJ
2
2
G.M. - Informatica B-Automazione 2002/03
•
L’elemento oscillante di un pendolo è costituito da una sbarretta di massa
ms=0.5kg e lunga 50 cm a cui è attaccata un disco di massa md=1kg di 20cm
di diametro. Determinare il momento di inerzia rispetto ad un asse
perpendicolare all figura passante per l’estremo superiore della sbarretta.
y
I
Asse di rotazione
dm R
tutto il corp o
2
dm R
corp o 1
2
dm R
Applic
azione
2
corp o 2
I I sbarra I disco
1
1
2
2
2
I sbarra ML 0.5 0.5 0.0417kgm
3
3
x
I disco
*
1
1
2
2
2
MR 1.0 0.1 0.005kgm
2
2
I disco Idisco Mh 0.005kgm 1.0kg .5 .1 0.005kgm .36kgm .365kgm
*
2
2
I 0.0417 .365 0.407kgm
2
2
2
2
2
G.M. - Informatica B-Automazione 2002/03