LEZIONE 09
MOMENTO DI UNA FORZA
Torque
Nella dinamica del punto materiale, fissata la massa e la forza, si deduce una sola accelerazione
lineare.
Nelle rotazioni, la stessa forza applicata sulla stessa massa, può invece produrre accelerazioni
angolari diverse a seconda del punto in cui viene applicata la forza.
Le rotazioni sono prodotte da una nuova grandezza fisica che tiene conto della forza e del punto di applicazione. Momento della Forza, (Torque)
r r
r
R^ F = M
≠
r r
r
F ^ R= M
F sin
F
F sin
F
Rsin
R
R
Rsin
O
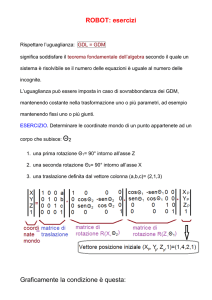
1) Modulo: prodotto del modulo di R per la componente di F perpendicolare a R (F sin ) oppure il prodotto del modulo di F per la componente di R perpendicolare a F (R sin ) detta
braccio, che è la distanza del polo 0 dalla linea di applicazione di F. Il modulo non cambia traslando la forza lungo la sua retta di applicazione
2) Direzione () al piano individuato da R ed F .
Se R ed F sono contenute nel piano xy il momento avrà la direzione dell’asse z
La direzione indica l’asse della rotazione prodotta dal momento.
r
r
3) Verso: avanzamento di una vite destrosa quando gira come quando r si sovrappone a F .
La rotazione è positiva o negativa a seconda del verso positivo fissato per asse z . Indipendentemente se la rotazione è oraria o antioraria.
1
NB:
Il Momento ha dimensioni N m come il Lavoro, ma è grandezza molto diversa : (il primo è vettore, il secondo è uno scalare).
Unità di misura del Momento è Nm ed è senza nome proprio.
r
r
Nei moti traslazionali, m poneva in relazione la forza con l’accelerazione. F = ma
r
r
Nei moti rotazionali studiamo la relazione fra M e
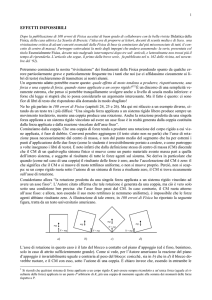
Consideriamo una m che ruoti nel piano x-y attorno all’asse z, a una distanza r da O’
FT
M
O’
z
ω
FR
r
d
m percorre una traiettoria circolare con una velocità angolare e una accelerazione =
.
dt
r
r
Poiché r ed F sono contenuti nel piano x y, esiste solo MZ.
Si ricordi che v = r aT = r
r
r
r
r
r r r
r r
M = r ^ F = r ^ ( FT + FR ) = r ^ FT
M z = r FT = r m aT = r m r = m r 2 = I z
M z = I z
I = m r 2 Momento di inerzia rispetto all’asse rotazione ( Rotational Inertia ).
Una massa ha infiniti I perché sono infinite le posizioni della massa rispetto all’asse di rotazione. Il momento di inerzia I, rappresenta la resistenza che un corpo oppone alla variazione della sua velocità angolare, così come la massa inerziale rappresenta la resistenza del
corpo alla variazione della velocità lineare.
Se raddoppio r, quadruplica I e quindi quadruplica Mz , a parità di
Se a ruotare è un sistema di masse poste a diverse distanze dall'asse (arto che ruota), il
Momento d’Inerzia del sistema dipende dalla distribuzione delle masse attorno all’asse di
rotazione
n
ITot m1 R12 m2 R2 2 m3 R32 ... mi Ri2
i 1
2
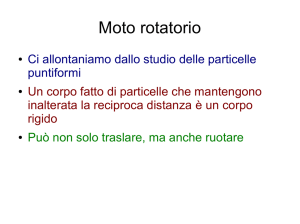
COPPIA DI FORZE :
E’ un sistema di due forze uguali e contrarie agenti su rette d’azione parallele e distanti d.
La risultante delle forze è nulla e quindi il centro di massa non può traslare, ma il corpo potrà ruotare.
F1
F2
d
Calcolando il momento della coppia di forze F1 e F2 rispetto a un qualsiasi polo, si trova
d r d r
( F1 F2 )
che il modulo del momento è sempre M d F
2
2
Il momento della coppia è un Vettore Libero
Ciò significa che:
1) la rotazione prodotta dal Momento della coppia avviene attorno a qualsiasi asse di rotazione.
2) mantenendo fisso l’asse, l'applicazione della coppia in punti qualsiasi produce la stessa rotazione attorno all’asse.
3
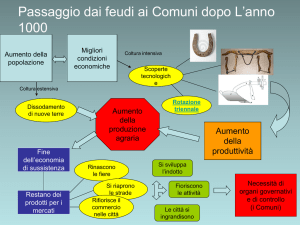
Esempio: Una Forza che agisce lungo una retta posta a distanza d dal C.M. di un corpo rigido non
vincolato, imprime un movimento traslatorio equivalente alla applicazione di F nel C.M. e un movimento rotatorio equivalente all’applicazione del momento M = Fd.
F
F
C.M.
F
d
C.M.
Rotatorio F d
F
aCM
F
m
Fd M I
t
*) Massetere e Temporale nella Mandibola
simulazione del Momento angolare alla pagina
http://www.ba.infn.it/~palano/chimica/book/it/Chap_6/sec_5/lz.html
4
Moto Corpo Rigido
Gli spostamenti elementari sono la Traslazione e la Rotazione.
Nella traslazione
* Gli assi O'x'y'z' solidali al corpo rigido rimangano paralleli agli assi della terna fissa Oxyz.
* In queste situazioni il corpo si sposta parallelamente a se stesso
* e la Velocità e l’accelerazione sono uguali per tutti i punti del corpo
* lo studio del moto si riconduce a quello del C.M.
NB: Anche quando le traiettorie del moto di traslazione sono curvilinee, tutti i punti descrivono
r
uguali traiettorie con velocità uguale a quella del centro di massa: VCM
r
r
r dP
r
R = MaCM Teorema centro massa (1°Legge cardinale R =
)
dt
1
EC = + 2 I CM
2
Nella Rotazione
* Gli assi O'x'y'z' solidali al corpo rigido, non rimangano paralleli a quelli della terna fissa Oxyz.
* Le singole mi del corpo rigido descrivono, con la stessa ω, circonferenze con centri sull’asse di
rotazione e raggi uguali alla loro distanza dall’asse.
La velocità delle singole masse è Vi ri .
L’equazione fondamentale della dinamica per la rotazione del corpo rigido è ( II° legge cardinale):
r
r
M est . = I
Rototraslazione E’ il movimento più generale di un corpo rigido. Viene descritto dal Teorema del
r
r
Centro di Massa ( R Est . = M aCM ) che fornisce la posizione del centro di massa e dal Teorema del
r
r
r dL
Momento Angolare M est . = I =
che fornisce la rotazione nello spazio del corpo rigido ridt
spetto al SR fisso Oxyz.
5