CORPO RIGIDO
MODELLO A DISTRIBUZIONE DISCRETA DI MASSA
Sistema costituito da un grandissimo numero di punti materiali Pi ,
ciascuno di massa mi costante nel tempo, vincolati rigidamente
l’uno rispetto agli altri da distanze ri,j costanti, sia in condizioni
statiche che durante il moto del corpo e sotto l’azione di forze
esterne.
MODELLO A DISTRIBUZIONE CONTINUA DI MASSA
Corpo costituito da una distribuzione continua della massa, con
densità in ogni suo punto costante nel tempo e con una forma
determinata invariabile nel tempo.
Il corpo rigido è indeformabile e la distribuzione di massa al suo
interno è costante nel tempo (sistema ideale).
TIPI DI MOTO DI UN CORPO RIGIDO
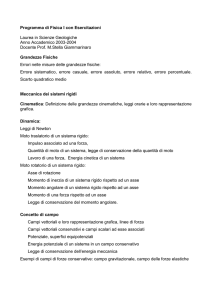
a) Traslazione:
Tutte le particelle descrivono traiettorie parallele (le rette che
uniscono due punti qualsiasi del corpo rimangono sempre parallele
alla loro direzione iniziale).
b) Rotazione attorno ad un asse:
Tutte le particelle descrivono traiettorie circolari attorno ad una
retta chiamata asse di rotazione.
(a) Moto di traslazione di un corpo rigido. (b) Moto di rotazione di un corpo rigido.
Equazione che descrive il moto nel caso a):
r
r
dv c
M
= Fext
dt
Equazione che descrive il moto nel caso b):
r
r
dL
= τ
dt
c) Rototraslazione:
Rotazione + Traslazione
Moto di un corpo rigido soggetto alla forza di gravità
DINAMICA DEL CORPO RIGIDO
MOTO TRASLATORIO DI UN CORPO RIGIDO
Quantità di moto
r
P =
r
m
v
∑ i i =M
i
∑
i
r
mi vi
M
con M massa del corpo.
La velocità del centro di massa vale:
r
vC =
∑
i
r
mi vi
M
In definitiva:
r
r
P = M vC
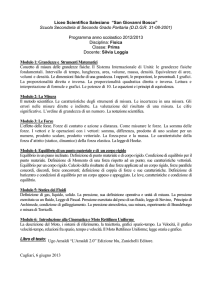
MOTO ROTOTRASLATORIO DI UN CORPO RIGIDO
Relazione cinematica fondamentale
C: centro di massa del corpo rigido
Velocità di rotazione (rispetto a C)
del punto Ai intorno ad un asse
r
parallelo ad ω e passante per C:
r r
r
v i′ = ω × ri ′
Velocità del punto Ai (rispetto ad un osservatore inerziale O):
r r
r
r
r
r
r
r
r r
′
′
v i = v C + v i = v C + ω × ri = v C + ω × ( ri − rC )
Velocità del punto Aj (rispetto ad O):
r
r
r
r
r
v j = v C + ω × ( r j − rC )
Velocità relativa di Ai rispetto Aj:
r
r
r
r r
v i − v j = ω × ( ri − r j )
La precedente è chiamata relazione cinematica fondamentale.
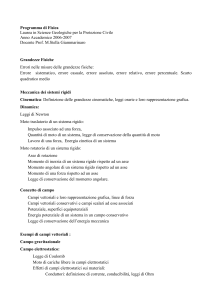
MOTO ROTATORIO DI UN CORPO RIGIDO
Momento angolare assiale
r
π piano di rotazione della particella (perpendicolare al piano della pagina); vi giace
su π con verso entrante nella pagina.
Velocità di Ai rispetto ad O (punto fisso in un sistema inerziale o
centro di massa del sistema):
r r
r
v i = ω × ri
r
v i = v i = ω ri sin ϑi
= ω Ri
NB: ω uguale per tutte le particelle
Momento angolare di Ai rispetto ad O:
r
r r
li = mi ri × vi
r
r
r r
π
(li ⊥ ri , vi ) ⇒ ( li , zˆ =
− ϑi )
2
π
li z = li cos ( − ϑi ) = li sin ϑi
2
r r
( ri ⊥ vi ) ⇒ (li = mi ri vi ) ⇒
⇒ (li z = mi ri vi sin ϑi = mi Ri vi )
li z = mi Ri2 ω
Momento angolare assiale del corpo rigido
Lz =
2
l
=
(
m
R
∑ iz
∑ i i )ω
i
i
Momento d’inerzia del corpo rispetto all’asse Z
I =
∑
mi Ri2
i
Relazione fondamentale del moto rotatorio del corpo rigido
Lz = I ω
Momento angolare del corpo rigido
r
L =
r
∑ li
i
r
r
In generale L non è parallelo ad ω
Tuttavia, se Z è un asse principale di inerzia, allora vale la
relazione vettoriale:
r
r
L = Iω
Se il corpo possiede qualche simmetria gli assi principali di
inerzia coincidono con gli assi di simmetria.
Per ogni corpo, qualunque sia la sua forma, ci sono almeno tre
direzioni mutuamente perpendicolari per le quali il momento
angolare è parallelo all’asse di rotazione.
Calcolo del momento d’inerzia
Momento d’inerzia di una particella rispetto ad un generico asse:
I = md2
(kg m 2 )
Momento d’inerzia di un sistema di n particelle rispetto ad un
generico asse:
I =
∑
mi d i2
i
Momento d’inerzia di un corpo rigido rispetto ad un generico asse
(modello a distribuzione di massa discreta):
I =
∑
mi Ri2
i
Momento d’inerzia di una corpo rigido rispetto ad un generico
asse (modello a distribuzione di massa continua):
I =
2
R
∫ dm =
2
2
R
ρ
dV
=
M
K
∫
con il parametro K detto raggio giratore.
Se il corpo è omogeneo:
I = ρ ∫ R 2 dV = ρ FG
FG fattore geometrico uguale per tutti i corpi aventi la stessa
forma e le stesse dimensioni (indipendentemente dal materiale).
Iz =
2
R
∫ ρ dV =
2
2
(
x
+
y
) ρ dV
∫
Ix =
2
2
(
y
+
z
) ρ dV
∫
Iy =
2
2
(
x
+
z
) ρ dV
∫
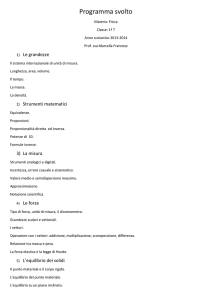
Se il corpo è una lamina sottile, allora:
Iz = Ix + Iy
Teorema di Huygens-Steiner:
I = IC + M a2