Le Macchine Elettriche
Alfredo Contin
Università di Trieste
Programma del Corso per i primi 3 CFU (30 ore circa):
–
–
–
–
trasformatori
motori in CC con diverse eccitazioni
motori sincroni a poli lisci e salienti
motori ad induzione (asincroni) avvolti e a gabbia
Principi di funzionamento
Equazioni per la statica e la dinamica
Caratteristiche di macchina per la regolazione della
velocità delle macchine rotanti
1
2
Programma del Corso per ulteriori 3 CFU (30 ore circa):
Le equazioni per la dinamica per i vari tipi di macchine
- funzioni di trasferimento ed equazioni di stato
- esempi di transitori di accensione e spegnimento
Trasformatori
- Il modello del trasformatore per lo stato stazionario
- I diagrammi fasoriali
- le caratteristiche di macchina
Le Macchine Asincrone
- il modello trasformatorico
- le curve caratteristiche (diagramma circolare)
- L’addensamento di corrente ed i rotori a gabbia
- Le armoniche del Campo Rotante
- Le coppie parassite
3
Programma per l’ultima parte del corso 3 CFU (30 ore
circa)
Generatori Sincroni - Alternatori
- i modelli di macchina ed i relativi circuiti equivalenti
- le curva caratteristiche di macchina
I Generatori in Continua
- Modelli e curve caratteristiche
- Studio della commutazione
Le prove di tipo sulle macchine elettriche
- prove a vuoto ed in corto circuito
- determinazione di alcuni parametri caratteristici
Riferimenti Bibliografici
• Fitzgerald, Kingsley, Kusko: Macchine Elettriche, Ed.
Franco Angeli.
• Penati, Bertoni: I Sistemi di Controllo, Ed.Zanichelli.
• Bonometti: Convertitori di Potenza e Servomotori
Brushless, Ed.Delfino
• Andriollo, Martinelli, Morini: I Trasformatori, teoria ed
esercizi, Ed.Cortina 2003
• Andriollo, Martinelli, Morini: Macchine Elettriche
Rotanti, Ed.Cortina
• appunti del corso in http://didattica.ing.units.it
– > dispense
• -> contin alfredo
– >macchine elettriche
4
Terminologia e Convenzioni Generali
Def. di Macchina: sistema interposto tra sistemi preposti ad uno
scambio di energia mediante il controllo o la trasformazione da una
forma di energia in un’altra.
di Macchina Elettrica: una delle forme di energia coinvolta è
elettrica.
I° Classificazione: possiamo classificare le macchine elettriche a
seconda del modo di controllare il flusso di energia:
a) variazione di alcune caratteristiche elettriche (trasformatori di
tensione, di corrente, di frequenza, convertitori statici o dinamici AC
DC)
b) trasformazione dell’energia da/in elettrica<=>meccanica (una
delle componenti è in movimento generatori e motori elettrici);
c) trasformazione dell’energia da elettrica=>termica (stufe, forni
elettrici);
d) trasformazione dell’energia da elettrica<=>chimica (pile,
accumulatori celle ad idrogeno);
5
Conversione Elettromeccanica della Energia
6
Def.: Conversione della energia elettrica con macchine che hanno
organi in movimento.
Generatori rotanti elettrici: macchine elettriche che ricevono energia
meccanica in ingresso e la trasformano in energia elettrica.
Motori elettrici: macchine elettriche che ricevono energia elettrica in
ingresso e la trasformano in energia meccanica.
Macchina ideale: fornisce in uscita lo stesso ammontare di energia
che ha assorbito all’ingresso.
Macchina reale: parte della energia in ingresso viene spesa per il
funzionamento della macchina e per sopperire alle perdite che
avvengono nella stessa.
L’esame delle cause di perdita e la stima del loro ammontare è di
fondamentale importanza sia tecnica che economica.
Se ne tiene conto introducendo il concetto di RENDIMENTO.
Il Rendimento
7
Def.: Rapporto tra potenza resa (Pr) e quella assorbita (Pa).
Pp
Pr Pa Pp
1
Pa
Pa
Pa
Dove Pp è la potenza persa in
macchina.
Macchina ideale => =1
funzione obiettivo da massimizzare a 1 minimizzando le perdite.
Può essere espresso in % così da rendere immediata la valutazione
della potenza persa %.
Pr
% 100
Pa
Pp% ( 100 % )Pa
è il termine di paragone, anche economici, delle prestazioni tra
macchine diverse.
Pp non rimane costante al variare del carico perché le perdite sono
legate alle prestazioni della macchina che possono variare al variare
del carico stesso.
Principi di Funzionamento
8
Pur trattandosi di macchine diverse, il loro studio si fonda su una
logica comune.
la conversione elettromeccanica o il controllo di flusso di energia si
attua per mezzo della interazione tra campi magnetici ed elettrici.
Osservazione: la presenza di un campo magnetico si spiega perché
le sue forze di attrazione/repulsione sono, a parità di volume, molto
più intense rispetto quelle dei campi elettrici.
Se si considera l’energia specifica (densità di energia) in spazi di aria
(traferri) che separano le diverse componenti di macchina, si ha che:
+ densità di energia => + intensità nelle forze in gioco
=> a parità di superfici affacciate o volumi coinvolti
Esempio:
• densità di energia magnetica in un traferro soggetto a B=1 [T]
2
1B
5
3
W
4 10 [ J / m ]
2 0
9
• densità di energia elettrostatica in un campo elettrico di K=10000
[V/cm] (esistono micromotori basati su forze di tipo elettrostatico)
1
W 0 K 2 4 [ J / m 3 ]
2
•caso dei motori endotermici => densità di energia fino a 107 [J/m3].
Le macchine elettriche sono sedi di campi magnetici sostenuti da
distribuzioni di correnti circolanti in circuiti elettrici immersi in mezzi
eterogenei e non lineari, aventi prefissate configurazioni geometriche.
In generale, le componenti delle macchine elettriche sono 3:
1) Circuito elettrico che genera e sostiene il campo magnetico e
trasforma l’energia elettrica in magnetica (sistema elettrico induttore).
2) Circuito che concentra il campo magnetico.
3) Circuito elettrico che, concatenandosi con il circuito magnetico da
cui assorbe energia, è sede di grandezze elettriche generate dal
campo magnetico stesso (sistema elettrico indotto).
Le Ipotesi di Campo
10
L’approccio logico per il loro studio è legato alla soluzione di
equazioni differenziali di campo (metodo teoricamente corretto ma
praticamente poco utilizzabile => software di simulazione basato su
elementi finiti e differenze finite).
Per i modelli di macchina utilizzati nei controlli e negli azionamenti è
necessario introdurre delle ipotesi di campo semplificative
Le Ipotesi (semplificative) di Campo: hanno lo scopo di individuare
l’andamento qualitativo delle linee di flusso del campo magnetico
senza ricorrere alla soluzione di complicate equazioni differenziali.
Segue la determinazione quantitativa del campo mediante le
equazioni dell’elettromagnetismo applicate a strutture semplificate
Le Equazioni Interne di Macchina
11
Si tratta di
• individuare i circuiti magnetici semplificati;
• individuare i circuiti elettrici concatenati con il campo magnetico;
• scrivere le equazioni sfruttando le regole dell’elettromagnetismo.
ciò porta a scrivere le equazioni interne di una macchina elettrica che
sono:
A) Legge di Ohm per il circuito elettrico che genera il campo
magnetico;
B) Equazione che descrive lo svolgimento del campo magnetico;
C) Equazione di concatenazione tra campo elettrico e magnetico;
D) Leggi di Ohm per i circuiti elettrici accoppiati con il campo
magnetico (Induttore ed Indotto).
Le incognite sono:
I) le correnti dei circuiti elettrici di macchina;
II) il flusso di induzione magnetica o flusso principale che si
concatena con i circuiti elettrici (definizione critica).
Le Equazioni Esterne di Macchina
12
La macchina elettrica è, per definizione, un sottosistema che scambia
energia. E’ necessario introdurre delle equazioni che traducano in
forma analitica i vincoli esercitati dai sottosistemi accoppiati con la
macchina (equazioni di collegamento esterno o equazioni esterne di
macchina)
Caso dei Motori Elettrici: Energia Elettrica => Energia Meccanica
Vincoli di Ingresso: generalmente rappresentato dalla imposizione del
regime di tensioni (DC, AC, PWM, etc.).
Vincoli di Uscita: è un vincolo meccanico (coppia all’asse, velocità
angolare, posizione etc).
Ciò si traduce in relazioni del tipo V=V(t), T=T(t), di equilibrio
elettrico e meccanico tipo :
Tm(t)=Tr(t)+F(t)+Jd(t)/dt
Osservazione: le equazioni interne ed esterne devono essere messe
in relazione tra loro per descrivere in modo univoco il funzionamento
della macchina.
Le Perdite nelle Macchine Elettriche
13
Sulla base della descrizione dei principi di funzionamento, è possibile
precisare la natura delle perdite comuni a tutti i tipi di macchine qui
considerate (perdite attive che si trasformano in calore).
La dissipazione provoca il riscaldamento della macchina. Il livello di
temperatura deve essere contenuto per non provocare la
degradazione dei materiali isolanti e di alcune parti meccaniche
(sistemi di raffreddamento adeguati).
Le perdite incidono sul costo di esercizio.
La limitazione delle perdite si persegue con:
• limiti per le sollecitazioni elettriche e magnetiche;
• limiti per le sollecitazioni meccaniche;
• scelta dei materiali (magnetici, conduttori, isolanti);
• accorgimenti costruttivi;
• sistemi di dissipazione e smaltimento del calore.
14
1) Perdite per Effetto Joule:
Sono le perdite che si manifestano in tutte le componenti della
macchina elettrica attraversate da una corrente elettrica. L’effetto
degli urti dei portatori di carica con la struttura da essi attraversata
produce un aumento della vibrazione atomica con cui è costituita la
struttura stessa (caratteristica microscopica descritta dal concetto
macroscopico di calore).
Dal punto di vista macroscopico, l’attitudine di un materiale a far
passare i portatori di carica viene riassunto dal concetto di resistenza
elettrica).
Se R è la resistenza dei conduttori ed I il valore efficace della
corrente che lo percorre, la potenza dissipata per effetto Juole vale:
Pj=RI2
R varia con la temperatura ed è influenzata dalla frequenza (effetto
pelle nei conduttori)
Le perdite possono essere valutate in termini di perdite per unità di
peso o perdite specifiche [W/Kg]. è utile per il confronto tra
materiali diversi.
Sia il peso specifico,
l,s la lunghezza e la sezione del conduttore;
j la densità di corrente, allora
15
2
l
j
Pj ( js )2 ( ls )
s
ora (ls) è il peso dell’avvolgimento, per cui
2
Ps j
j
ls
Pj
Cu
Ps j 2.4 j 2
[ W / kg ]
Al
Ps j 3.5 j 2
[ W / kg ]
Perdite nei materiali ferromagnetici:
L’uso di materiali ferromagnetici è fondamentale per realizzare circuiti
a bassa riluttanza magnetica ed ottenere circuiti magnetici che
convoglino il campo in un spazio ridotto.
A parità di intensità di campo, in assenza di tali materiali, le correnti
necessarie per la generazione del campo dovrebbero avere una
notevole intensità.
16
Questi materiali non sono ideali e dissipano energia (perdite nel ferro)
se sottoposti a campi a frequenza variabile, con due meccanismi
principali: (A) perdite per isteresi e (B) per correnti parassite.
A) perdite per isteresi magnetica
in regime di frequenza variabile, ad ogni ciclo di isteresi corrisponde,
in termini di energia dissipata per unità di volume, l’area del ciclo
stesso.
P =k fB [W/Kg]
i
i
M
Pi è proporzionale alla frequenza f,
ki è una costante che dipende dal materiale
scelto,
BM riassume le caratteristiche dell’area
sottesa dal ciclo di isteresi magnetica
1.62.1 (2).
La
scelta
del
tipo
di
materiale
ferromagnetico è legata alla applicazione e
dipende da BM e dalla forma dell’area.
Materiali migliori hanno un BM elevato ed un’area piccola (più costosi).
17
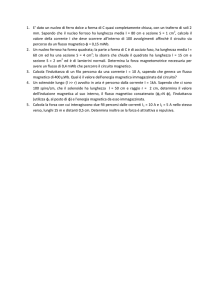
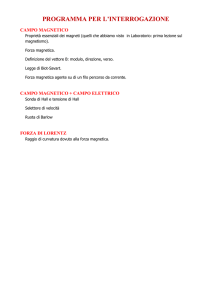
Esempio di curva di prima magnetizzazione
Esempio di curva di perdita
B) Perdite per Correnti Parassite (di Foucault)
a causa della conducibilità del materiale ferromagnetico, in regime di
frequenza variabile, il flusso variabile induce delle f.e.m. che
generano correnti vaganti in circuiti non noti a priori con conseguente
dissipazione di energia per effetto Joule.
Se il campo varia con legge B(t)=BMcos(t), la potenza dissipata, Pd,
risulta
con
i corrente istantanea concatenata con il
2
1 d flusso
.
2
Pd Ri
R dt
Se (t)=SBMcos(t)
(s superfice appoggiata sul circuito dove scorre la corrente i)
Pd diventa:
( SB )2 2
Pd
M
18
sin ( t )
( 2SBM f )2
il cui valore medio, in un periodo T=/2 vale Pd
2R
R
In regime sinusoidale, la potenza dissipata per unità di peso può
essere stimata con
Pd=kp’f2BM2
[W/Kg]
kp’ dipende all’incirca, dall’inverso di e dalla forma geometrica della
sezione trasversale del circuito magnetico
Provvedimenti per ridurre le perdite nel ferro:
a) materiali con scarsa conducibilità ( elevato): leghe ferro silicio;
b) laminazione del circuito magnetico: il nucleo del circuito magnetico
è realizzato accostando lamierini di piccolo spessore (3.55 mm)
isolati tra loro in modo che i tubi di flusso di correnti parassite siano
vincolati a chiudersi all’interno del lamierino stesso.
Si allunga il percorso della corrente in una sezione più stretta.
19
Pd=kp2f2BM2 [W/Kg]
I materiali ferromagnetici possono essere caratterizzati da una Cifra
di Perdita (Cp): potenza persa in un Kg di materiale quando sia
sottoposto ad una induzione sinusoidale con valore B=1 T alla
f=50Hz.
Nota Cp =>Pf=Cp(f/50)mBM2 [W/Kg]
m=1.21.8
C) Perdite Meccaniche
sono presenti dove ci sono componenti in movimento e si distinguono
in:
perdite per attrito: Pma=ka=
ka(d/dt)
perdite per ventilazione: causate dal moto vorticoso dell’aria
generato da parti in movimento o dalle ventole di raffreddamento
Pmv=kv3= kv(d/dt)3
20
D) Perdite Addizionali
sono perdite dovute ai flussi variabili e sono legate alle caratteristiche
costruttive della macchina
• perdite per correnti parassite nei conduttori degli avvolgimenti;
• perdite per isteresi e correnti parassite nelle parti metalliche della
macchina che non fanno parte del circuito magnetico (bulloni, tiranti,
carcassa, etc.)
Perdite nei contatti striscianti.
E) Perdite dovute alle armoniche
la forma d’onda del campo magnetico non è sinusoidale (saturazione,
presenza delle cave). Le armoniche di flusso generano solo perdite.
21
La non -linearità
la non linearità della caratteristica magnetica provoca degli effetti di
distorsione che devono essere adeguatamente valutati. Se ne da
una descrizione qualitativa.
Se si impone che i flussi siano Se invece si impone che la
sinusoidali (tensione impressa corrente di magnetizzazione sia
sinusoidale), ne segue che le sinusoidale,
l’induzione
e,
correnti di magnetizzazione (che conseguentemente
il
flusso,
generano i flussi) sono distorte.
vengono distorti.
Le Grandezze Nominali
22
Tutte le macchine sono definite da un insieme di parametri di tipo
• costruttivo (dimensioni, tipo di avvolgimento, tipo di isolamento, tipo
di raffreddamento….)
• funzionale (tensione, corrente, frequenza,…)
grandezze nominali: definiscono le prestazioni agli effetti della
ordinazione e del collaudo e corrispondono a valori di grandezze
elettriche e meccaniche per le quali la macchina è stata dimensionata
(dati di targa).
I limiti elettrici e termici dipendono principalmente dal tipo di
isolamento adottato che da un lato
• definisce i valori ammissibili delle sollecitazioni dovute al campo
elettrico sui dielettrici,
• dall’altro stabilisce la massima temperatura ammissibile (Classi
d’Isolamento) determinata dalle perdite nei materiali conduttori e
magnetici, dalle perdite meccaniche, dal tipo di servizio e dal sistema
di raffreddamento.
Scelta dei valori di densità di corrente e di induzione
Le Classi di Isolamento
23
TIPI DI SERVIZIO - TRANSITORI TERMICI
24
Per tenere conto, a livello di norme, del comportamento in
funzione del carico di un componente elettromeccanico si
definiscono i seguenti diversi tipi di servizi (CEI EN34-1, sez.3):
S1 - Servizio continuo
S2 - Servizio di durata limitata
S3 - Servizio intermittente
S4 - Servizio intermittente periodico con avviamento che
influenza il riscaldamento della macchina
S5 - Servizio intermittente periodico con avviamento e frenatura
che influenza il riscaldamento della macchina
S6 - Servizio ininterrotto con carico intermittente
S7 - Servizio ininterrotto con avviamento e frenatura che
influenzano il riscaldamento della macchina
S8 - Servizio ininterrotto con cambiamento periodico della
velocità
Tipo di Servizio Secondo le norme
25
Tipo di Servizio Secondo le norme
26
RAFFREDDAMENTO
CIRCUITO APERTO
VENTILAZIONE DI MACCHINA CHIUSA
MACCHINA AD ASSE
ORIZZONTALE
RAFFREDDATA IN
CICLO CHIUSO
REFRIGERANTE
27
28
CLASSIFICAZIONE IN BASE AL MODO DI
RAFFREDDAMENTO
29
30
NORME SUL TIPO DI RAFFREDDAMENTO DELLE MACCHINE ROTANTI
• I metodi di raffreddamento delle macchine elettriche rotanti sono
•
•
•
classificati dalla norma:
CEI 2-7/97- IEC 34 - 6 (IC CODE I° e II°)
Il codice IC tipo I° semplificato si riferisce solamente all’aria ed è
costituito dal codice IC seguito da due cifre caratteristiche
La prima indica la disposizione del circuito di raffreddamento
La seconda la modalità con cui è fornita la potenza necessaria alla
circolazione del fluido di raffreddamento
quando la seconda cifra è 1 (autocircolazione con dispositivo
per muovere il fluido di raffreddamento montato sull’albero
della macchina), tale cifra può essere omessa
31
32
33
34
•
•
Il codice IC II° completo è costituito al massimo da cinque lettere o
numeri, ad esempio:
IC 8 A 1 W 7
Il significato della sigle è indicato nella tabella seguente.
IC (international cooling).
Sigla fissa.
Primo numero
Prima lettera
Secondo numero
Seconda lettera
Terzo numero
Sigla internazionale
di raffreddamento
Tipo di circuito
Tipo di circuito primario
Metodo di circolazione
del fluido primario
Tipo di fluido secondario
(se applicabile)
Metodo di circolazione
del fluido secondario
35
GRADO DI PROTEZIONE DELLE MACCHINE ELETTRICHE
MACCHINE APERTE: nessun dispositivo è stato previsto per
impedire o rendere difficile l’accesso a qualcuna delle sue parti
interne
MACCHINE CHIUSE: le parti attive sono contenute in un
involucro che non permette il passaggio di aria di
raffreddamento fra l’esterno e l’interno
MACCHINE per Atmosfere Esplosive: è una macchina speciale
adatta a funzionare in ambienti con pericolo di esplosione (CEI
2-2, 88)
36
MACCHINE PROTETTE: è costruita in modo da impedire
l’accesso a parti interne, senza ostacolare il passaggio di aria
di raffreddamento fra l’esterno e l’interno
Protetta Contro Corpi Solidi: impedire la penetrazione di corpi
solidi di diametro maggiore rispettivamente a 50-3-1 mm.
(grossi, medi, piccoli)
Protetta Contro lo Stillicidio: impedire che le gocce liquide o
particelle solide, cadenti sulla macchina con un angolo non
maggiore di 15° rispetto alla verticale, non possano
raggiungere le parti attive interne, né direttamente, né
indirettamente scivolando lungo le superfici inclinate
37
Protetta Contro gli Spruzzi di Acqua: impedire che le gocce
liquide o particelle solide, cadenti sulla macchina con un
angolo non maggiore di 60° rispetto alla verticale, non possano
raggiungere le parti attive interne, né direttamente, né
indirettamente scivolando lungo le superfici inclinate
Con Bocche di Ventilazione: le parti attive sono contenute in
un involucro che permette il passaggio dell’aria di
raffreddamento attraverso opportune aperture previste per
essere raccordate con l’ambiente diverso da quello in cui la
macchina è installata
NORME CEI EN 60529/70-1: Gradi di protezione degli involucri.
Norma generale che si applica a tutti gli apparati elettrici ed è
la norma più generale
38
NORME CEI EN 6034-5/2-16: Classificazione dei gradi di
protezione degli involucri delle macchine elettriche rotanti.
Norma particolare
CEI - IEC 34 - 5 (IP CODE)
•
•
•
Il codice IP completo è costituito da due numeri, ad esempio:
IP 54
Il significato della sigle è indicato nella tabella seguente.
La sigla indicata come esempio significa:
macchina protetta contro l’ingresso di polvere in
quantità tale da pregiudicarne il buon funzionamento e
contro l’ingresso di acqua proveniente da qualsiasi
direzione. (L’acqua non deve provocare effetti nocivi).
39
IP (international protection) Sigla
fissa.
Primo numero
Secondo numero
Sigla internazionale del
grado di protezione.
Contro l’ingresso di
corpi estranei.
Contro l’ingresso di
acqua.
Macchina ad Asse
Orizzontale
Raffreddata in Ciclo
Aperto
Grado di protezione
dettato dalla forma della
griglia di presa e di uscita
dell’aria
40
41
42
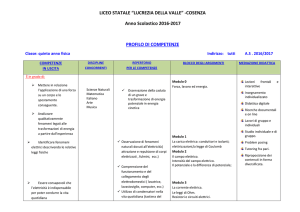
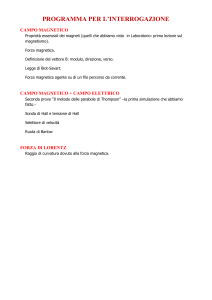
ELEMENTI OGGETTO DI UNIFICAZIONE IN UNA MACCHINA
ROTANTE
L
C
D
1
H
2
B
A
43
FORME COSTRUTTIVE DELLE MACCHINE ELETTRICHE
ROTANTI
•
Le forme costruttive delle macchine elettriche rotanti sono definite
dalla Norma:
CEI 2-14/97 - IEC 34 / 7 (IM CODE I & II)
(Classificazione delle forme costruttive e dei tipi di installazione)
• Il Codice IM-I° riguarda unicamente le macchine con supporti a
scudo e con una sola estremità di albero
IM + B/V+Numero
B=asse orizzontale; V=verticale
44
45
46
47
48
Il Codice IM completo è costituito da 4 numeri: IM 7535
IM (international mounting
arrangement) Sigla fissa.
Primo numero
Secondo numero e Terzo
numero
• Quarto
La siglanumero
IM 7535 significa:
Sigla internazionale di
forma costruttiva
Categoria della forma
costruttiva (9 cat.)
Disposizione di montaggio
(cuscinetti, asse, piedi, ecc)
Tipo di estremità d’albero
macchina ad asse orizzontale;
con supporti a cavalletto, due cuscinetti, con piedi
sollevati, su basamento su cui poggiano anche i
supporti;
con estremità d’albero flangiata.
49
Richiami di Elettromagnetismo
50
Generazione del campo magnetico: una corrente elettrica produce un
campo magnetico nello spazio che la circonda. Il campo magnetico e
tutti i fenomeni magnetici, sono generati da correnti in moto.
0
uT xur
B
I 2 dl
4
r
Cond. rettilineo
0
sin
B
I 2 dl
4 r
Legge di Biot-Savart
0 I
B
u
2 R
Forze magnetiche tra correnti elettriche
2 II '
F Km
L
R
Campo generato da una corrente in circuito chiuso
Legge di Ampere: data una corrente I in un conduttore a
lunghezza infinita, il campo B è costante in ampiezza lungo una
linea circolare. La circolazione magnetica valutata su un percorso
circolare di raggio R è
B
0 I
0 I
L
2R 0 I
L Bdl BL
2 R
2R
51
52
Il flusso magnetico attraverso una superficie S posta in un campo
magnetico vale:
B S B u n ds
B
H
Il campo magnetizzante è
0
BL
I
I
H L Hdl
L
2 R I
0
2 R
2 R
Legge di circuitazione magnetica: La circolazione del campo
magnetizzante lungo una linea chiusa è uguale alla corrente libera
totale che fluisce nel percorso. Se ho N linee chiuse affiancate:
H HL NI
Circuito magnetico ideale: regione dello spazio costituita da un
tubo di flusso in cui posso considerare il vettore B costante in
modulo.
Dato un tubo di flusso di lunghezza L, ed A una qualsiasi superficie 53
che si appoggia al tubo, la legge della circuitazione diventa:
NI = ampere/spire di
magnetizzazione
Se il tubo di flusso è regolare a tratti:
N
I
H
l
i
i
i
i
i 1
i 1
n
m
Se B è uniforme nella sezione (A=BdA). Essendo il vettore H // a dl
Rm è la riluttanza o la resistenza magnetica del circuito considerato
54
Legge dell’induzione (Faraday-Henry): sia (t) il flusso concatenato
con un circuito elettrico. Esso induce una forza elettro-motrice (forza
che mette in moto cariche elettriche) nel circuito elettrico in ragione
della rapidità della variazione del flusso stesso.
La direzione del moto delle cariche è tale da generare un nuovo
campo magnetico che si oppone a quello che lo ha generato.
( t )
( t )
d( t )
E
dt
Flusso totale, (t):
tiene conto del
campo generato.
Flusso concatenato: è la quota delle
linee del campo che si chiudono
inglobando il circuito elettrico.
Coefficiente di Auto-Induzione: Considero un conduttore chiuso dove
fluisce la corrente I. Si genera un campo magnetico nello spazio
circostante. Possiamo calcolare il flusso del campo magnetico
attraverso il circuito dovuto al campo generato dalla corrente che
fluisce nel circuito stesso. (flusso autoconcatenato)
sia (t) il flusso concatenato con un circuito elettrico, esso 55
è
proporzionale alla causa che lo genera
(t) = Li(t).
L (coefficiente di auto induzione) dipende dalla forma del conduttore e
dal mezzo in cui il conduttore è inserito [H].
d
d ( LI ( t ))
EL
dt
dt
I ( t )d ( L ) Ld ( I ( t ))
dt
dt
56
Coefficiente di Mutua-Induzione: Considero due conduttori chiusi
dove fluiscono le correnti I1 ed I2. Nel loro intorno si stabilisce un
campo magnetico le cui linee si concatenano diversamente.
Possiamo calcolare il flusso del campo magnetico generato da I1 che
si concatena con il circuito 2 e viceversa.
1(t) =M12i2(t)
2(t) =M21i1(t)
d 2
d ( M 12 I 2 ( t ))
M 12 d ( I 2 ( t ))
EM 1
dt
dt
dt
d 1
d ( M 21I 1 ( t ))
M 21d ( I 1 ( t ))
EM 2
dt
dt
dt
Mij (coefficienti di
mutua-induzione)
dipende
dalla
forma
del
conduttore e dal
mezzo in cui il
conduttore
è
inserito
e
dall’orientamento
[H].
57
Esempio: Bilancio Energetico
esempio di studio di un semplice sistema elettromeccanico lineare.
Sia R la resistenza dell’avvolgimento, composto di N spire, che genera
il campo magnetico.
Sia v(t) la tensione applicata ai suoi morsetti. Questa fa circolare la
corrente i(t) che genera il flusso (t).
Ni( t ) ( t )
(t) concatenandosi con le N spire induce una f.e.m. (legge di Lenz).
d( t )
d ( N( t ))
e( t )
( t ) N( t )
dt
dt
Se applichiamo il II°principio di Kirchoff alla maglia di ingresso del
circuiro elettrico si ha:
(t)
i(t)
v(t)
N
e(t)
d( t )
v( t ) Ri ( t )
dt
Per valutare gli scambi energetici che
avvengono nel sistema nell’intervallo di
tempo dt, si moltiplicano entrambi i
membri per i(t)dt
d( t )
v( t )i( t )dt Ri ( t )dt i( t )
dt
dt
58
2
v(t)i(t)dt è l’energia elettrica assorbita nel tempo dt dal circuito, energia
fornita dalla sorgente esterna.
Ri2(t)dt è l’energia elettrica dissipata in calore per effetto Joule sulla
resistenza R.
i(t)d(t) è la somma della variazione di energia magnetica
immagazzinata nel circuito magnetico (dWm) e del lavoro meccanico
sviluppato (d) dall’ancora meccanica posta in rotazione (d) dalla
coppia magnetica .
i( t )( t ) dWm d 0 cresce
Se si manifesta uno spostamento d dell’elemento mobile, ricordando
l’espressione della energia magnetica in un sistema lineare il cui
coefficiente di auto induzione è L
( t ) Li( t )
1 2
Wm Li ( t )
2
1
dWm i( t )Ldi( t )
2
Ne viene che
59
1
i( t )d( t ) i( t )d( t ) d
2
dWm
1
d( t )
i( t )
2
d
d
equazione fondamentale della conversione elettromeccanica della
energia.
Le grandezze variabili nel tempo in modo sinusoidale (fasori)
Legge di Faraday-Henry in forma differenziale
rot ( ) d
dt
Legge di Ampere-Maxwell in forma
rot( B ) 0 j 00 d
dt
differenziale
Se le grandezze di campo elettrico () e magnetico (B) variano
lentamente in modo che si possano trascurare le derivate rispetto al
tempo, allora i campi elettrici e magnetici possono essere studiati
separatamente, non interagiscono tra loro (condizione di quasistazionarietà).
Sia y(t) una grandezza variabile nel tempo in modo sinusoidale 60
(cosinusoidale)
y(t)=YMsin (t+)
=>
y(t)=YMcos (t+)
YM è il valore massimo;
t è una fase che varia linearmente con il tempo, t, in proporzione
alla pulsazione =2f= 2/T. f è il numero di variazioni che la y(t)
compie al secondo (Hertz) e T è il periodo di tempo dopo il quale la
y(t) si ripete uguale a se stessa.
è la fase iniziale (per t=0) a cui viene associato il valore iniziale
della y(t=0)=y( ). Per semplicità si assume =0 (traslazione di assi).
Y(t)
1 T
Valore medio:
Ym
T
0
y( t )dt
1 T
1 2
Ym YM sin( t )dt
YM sin( t )dt
T 0
T 0
T
1 2
YM
2
Ym
YM sin( t )dt
cos( t )0
0
YM
2
2
1 1 0
Ym
t
2
61
Valore medio in metà periodo:
1 T2
1 T2
1 T 2
Ym
y( t )dt
YM sin( t )dt
YM sin( t )dt
T 0
T 0
T 0
2
2
2
YM
YM
YM
2
Ym
sin( t )dt cos( t )0 1 1 YM 0.637YM
0
Valore efficace in metà periodo:
è il valore che elevato al quadrato fornisce la potenza del segnale in
un periodo di tempo T.
1 T
Y
T
2
0
1
2
Y
T
2
1
2
y( t ) dt
T
2
YM
Y
2
2
0
T
2
0
T
0
2
y( t ) dt
1
2
2
YM sin ( t )dt
T
2
1 cos( 2t )
YM
dt
2
2
2
0
T
2
YM sin 2 ( t )dt
2
1 cos( 2t )dt
0
2
2
2
2
62
YM
YM
0
0 cos( 2t )dt 2 ( 0 ) 2
YM
Y
2
YM
1 T
2
y( t ) dt
0
Y
T
2
Fattore di forma:
Kf
1.11
1 T
2
lega tra loro valore
Ym
2 2
y
(
t
)
dt
Y
M
0
medio e valore efficace
T
YM
2
Y
2
2
YM
2
Y
2
YM
dt
2
Rappresentazione vettoriale (i fasori):
La rappresentazione di una grandezza sinusoidale in termini di
tempo non è funzionale dal punto di vista del calcolo. Si preferisce
passare attraverso una sua rappresentazione vettoriale (trasformate
di Steinmetz). I vettori rappresentativi possono essere espressi
analiticamente in termini di numeri complessi e graficamente
mediante i fasori. La relazione tra queste rappresentazioni è data
dalle equazioni di Eulero
63
Intuitivamente, se si fa
ruotare un vettore r su un
piano
con
pulsazione
costante , questo descrive
una traettoria circolare.
Se, istante per istante, si
proietta il vertice del vettore
sull’asse
orizzontale
e
verticale, nel tempo si viene
a tracciare una traettoria che è descivibile con una funzione cosin e
sin, rispettivamente.
Se y(t) una grandezza variabile nel tempo in modo sin o cosin
y(t)=YMsin (t+) =>
y(t)=YMcos (t+) =>
y(t)=IM[YMe j(t+)]
y(t)=RE[YMe j(t+)]
dove y= YMe j(t+)= YMe jt ej= (YM ej)e jt
(YM ej) rappresenta il valore iniziale della nostra funzione di tempo e
rimane fissa rispetto all’asse di riferimento del piano di Gauss (Re-Im)
e corrisponde al fasore della grandezza sinusoidale.
64
Il termine moltiplicativo e jt sta ad indicare che il vettore ruota attorno
all’origine nel verso indicato come positivo con pulsazione costante
nel tempo.
Si può anche scrivere che
y=YMe j(t+)=YM[cos (t+)+jsin(t+)]
la funzione seno costituisce il coefficiente della parte immaginaria del
vettore rotante mentra la funzione coseno costituisce quella reale.
Analogamente, YM ej=YM[cos +jsin]= YM[a+jb]
Una volta conosciuto il fasore, lo posso scrivere in forma binomia e
metterlo in relazione con altri fasoro che hanno la stessa pulsazione
come relazione tra vettori sfruttando l’algebra vettoriale (vettori e
matrici).
Assegnato un vettore rotante: y=YMe j(t+),
la sua derivata vale: dy/dt=d(YMe j(t+)/dy=jYMe j(t+)= jy.
La derivata di un vettore rotante è pari al modulo del vettore stesso
moltiplicato per la pulsazione e risulta sfasato in senso antiorario di 90°
(/2) rispetto al vettore assegnato.