Università degli Studi di Napoli Federico II
Facoltà di Ingegneria
Tesi di Laurea in Meccanica delle Vibrazioni
INFLUENZA DELLA FLESSIBILITA’
STRUTTURALE DELL’AVANTRENO SULLA
DINAMICA DEL MOTOCICLO
Relatore:
Ch.mo Prof. Sergio della Valle
Candidati:
Veronica D’Onofrio
Correlatore :
Dott. Ing. Giandomenico Di Massa
Claudio Iaselli
Matr. 343/101
Matr. 343/224
1/38
Obiettivi del lavoro di tesi
Analisi dell’influenza della flessibilità strutturale sul
fenomeno dinamico denominato “shimmy” e la sua
stabilità nei sistemi costituiti da ruote sterzanti, con
particolare riferimento all’avantreno del motociclo.
Il problema è stato trattato secondo due diversi
approcci:
- Integrazione numerica delle equazioni del moto
- Modellazione di tipo multibody
2/38
Il fenomeno dinamico detto “shimmy”
Vibrazione che interessa
le ruote sterzanti dei
veicoli
Ambiti in cui si
manifesta il fenomeno:
automobili, carrelli di
atterraggio, motocicli
Il fenomeno riguarda sia
ruote disposte su un
asse comune sia ruote
singole (caster)
3/38
Il caster
Ruota sterzante il cui
punto di contatto con il
piano stradale giace
posteriormente rispetto
all’intersezione dell’asse
di sterzo con il piano
stesso.
Il motociclo secondo
Roe: coppia di caster
vincolati mediante
cerniera di sterzo con
asse inclinato.
4/38
Modi di vibrare “out of plane” del motociclo
Modo capsize : modo non
oscillatorio, di caduta
laterale del motoveicolo.
Modo weave : modo
oscillatorio, di
ondeggiamento e
serpeggiamento che
coinvolge tutto il veicolo
ma in particolare il
retrotreno.
5/38
Modi di vibrare “out of plane” del motociclo
Modo wobble : modo
oscillatorio, che si
manifesta con l’oscillazione
dell’avantreno intorno
all’asse di sterzo.
Caratteristiche :
- Velocità di avanzamento
moderate
- Frequenze da 4 a 9 Hz
6/38
7/38
Cause della instabilità delle oscillazioni del
caster
Primi studi :
- Influenza della deformabilità dei pneumatici sulla
instabilità delle oscillazioni
Teoria di Roe (1970) :
- La flessibilità strutturale come causa prima della
instabilità del sistema
- Origine del fenomeno : possibilità di deviazione laterale
della superficie di contatto ruota-strada rispetto al piano
individuato dall’asse di sterzo del motociclo
8/38
M w t 2 M w t tk Rt '
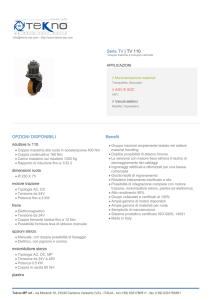
Il modello di Roe
Ipotesi:
- veicolo che avanza con
velocità costante v
- ruota rigida
- attrito coulombiano
(F=μR)
Ruota libera di spostarsi
lateralmente
Flessibilità laterale
strutturale modellata
mediante due molle di
rigidità k
9/38
Il modello di Roe
Le equazioni del moto :
- Asse di sterzo verticale :
I s I wo -tk
M W t 2 - M W t tk - Rt '
- Asse di sterzo obliquo :
(I S IWO ) sk R ' sin t ' s M S gh sin R sin
MW s 2 MW s sk sR ' sin MW gs sin
10/38
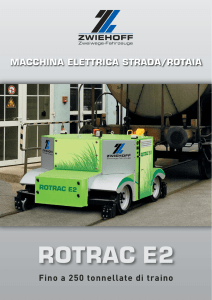
Il modello di Roe : risultati
k è il parametro
che ha la maggiore
influenza sulla
stabilità
All’aumentare di k
si osserva un
incremento dello
smorzamento e un
decremento della
ampiezza delle
oscillazioni
K = 104 N/m
K = 105 N/m
K = 106 N/m
11/38
Modello analitico dell’avantreno del motociclo
Integrazione numerica delle equazioni differenziali del moto
(Simulink)
Modelli di riferimento:
Modello analitico di Roe :
equazioni differenziali di difficile integrazione numerica
Modello “classical shimmying wheel ” di Stépán e Goodwine:
modello più semplice, con un numero ridotto di gradi di
libertà
12/38
Modello “classical shimmying wheel”
Parametri geometrici-inerziali :
mw massa ruota
mc massa braccio di sospensione
ruota
l
lunghezza caster
r raggio ruota
-
Ipotesi :
Ruota rigida
Veicolo modellato come un corpo rigido che avanza in rettilineo a
velocità costante
Cerniera di sterzo ad asse verticale
Moto trasversale della cerniera di sterzo vincolata al veicolo
attraverso elementi elastici di rigidità k/2
Il sistema ha tre gradi di libertà : θ,
y,
φ
13/38
Reazione
del vincolo
(suolo)
< F attrito statico
Moto
di puro
rotolamento
:
2
2del moto : 1
Equazioni differenziali
Fs Fx Fy s Fz s mc mw
Equazioni
+
2
Vincolo cinematico:
vr = 0
3mw tg 2
v 1
1 3mw 2
k
(Due
equazioni
differenziali
scalari del
tg
y 1
2
diCondizione
lAppell-Gibbs
cos 2 di2stabilità
mc
lmc
2mc cos
primo
ordine)
lineare
soluzione
mw r 2
1 della
2
2
6tg cos 2
2 cos 2
tg cos
3 (θ=0, y=0) :4mc l 3mwr < 2mcl
nulla
l
y vtg
cos dei parametri geometrici ed inerziali
Funzione
dalla velocità
v Indipendente
lsen
R cos
Il sistema evolve nello spazio delle fasi a tre
dimensioni , , y
14/38
di (suolo)
slittamento:
ReazioneMoto
del vincolo
> F attrito statico
Equazioni di
nello spazio
delle del moto:
Equazioni
differenziali
Lagrange Il sistema evolve
fasi a 6 dimensioni , , y, y, ,
v ry
v 2 rx v 2 ry
v ry
d g
v rx
2
mc m w - Ml sen - ky - 2 2 sen Md g - 2 2 cos Md g
cos
v rx v ry
v rx v ry
1
r 2 l mc m w
- Mlcos
mc 1 2 m w
4l M cos
3
1
r2
l
y m c 1 2 m w
4l
3
Mcos
v rx
v 2 rx v 2 ry
v ry
v 2 rx v 2 ry
d g
cos
2Md g
mwr
15/38
Fs > μsMg
vr = 0
Fs ≤ μsMg
Rotolamento
Slittamento
Slittamento
Rotolamento
Quando
è
consentito
il
passaggio
tra
le
due
condizioni
Moto caotico
mc=1.5 kg
k=75 N/m
mw=3.75 kg l=0.2
v=1m/s
μs=0.18
r=0.1 m,
μd=0.18
16/38
La Simulazione
fd geometrici
coefficienteed
di attrito
dinamico
0.5
Parametri
inerziali
scooter Scarabeo
150
fs
mw
mc
l
r
coefficiente di attrito statico
1
• La simulazione viene condotta valutando
l’influenza di tre valori di rigidezza :
9 Kg
massa di ruota + pneumatico
5
1. k=10 N/m
massa avantreno (ruota
esclusa) =
4
2. k=10 N/m
massa di steli + piastra di supporto + perno 9.8 Kg
6 N/m
3. k=10
del cannotto di sterzo
+ perno
della ruota +
distanziale
0.084 m
avancorsa normale
• Sono effettuate più prove per valori
0.3 m
raggio della ruota
crescenti di velocità tra 5 e 50 m/s
17/38
Modello Simulink del sistema in condizione di puro rotolamento :
La simulazione : moto di rotolamento
La condizione di stabilità : 3mwr2 <2mcl2
non è soddisfatta
18/38
k = 104 N/m
Dalle simulazioni risulta che le oscillazioni intorno all’asse
di sterzo sono instabili per ciascun valore di k considerato
k = 105 N/m
k = 106 N/m
19/38
La simulazione : moto di slittamento
Condizioni iniziali assegnate in modo da assicurare la
continuità nel passaggio tra le due condizioni:
2
2
2
r
m
l
1 2 2 4 2 F3m
1 2
2
w Mg
c
mwl v s 2 s
m
m
mc g 0
w
s w
2
4
2
3mw r 4mcl
2
2
Dai risultati delle simulazioni
relative al moto di
rotolamento
per ogni k e v
Condizioni iniziali del sistema di
equazioni differenziali del moto di
slittamento
*
per ogni v
, t (s)
, y, y, ,
20/38
Modello Simulink del sistema in condizione di slittamento
21/38
1) k = 105 N/m
v = 5 m/s
v = 20 m/s
v = 10 m/s
v = 50 m/s
22/38
1) k = 106 N/m
v = 5 m/s
v = 50 m/s
v = 20 m/s
Rispetto al caso precedente:
• Aumento dello smorzamento delle
oscillazioni
• Ampiezze di oscillazione molto più
basse (0.002 rad circa)
23/38
3) k = 104 N/m
v = 5 m/s
• Ampiezze di oscillazione
maggiori rispetto ai casi
precedenti: 0.25 rad (14°
circa)
v = 50 m/s
• Leggero aumento della
ampiezza della oscillazione
rispetto a v=5 m/s: 0.3 rad
(17° circa)
24/38
Conclusioni
La rigidezza strutturale ha una importante influenza
sulla stabilità del sistema:
Bassi valori di k
Valori di k elevati
Grandi ampiezze di
oscillazione
• Aumento dello smorzamento
delle oscillazioni
• Riduzione delle ampiezze
della oscillazione
stazionaria
Modelli successivi che considereranno l’inclinazione
dell’asse di sterzo e l’evoluzione continua del sistema
tra le condizioni di puro rotolamento e di slittamento
potrebbero rappresentare meglio la dinamica reale del
fenomeno considerato
25/38
Modellazione
al CAD MULTIBODY
dell’avantreno del
MODELLAZIONE
motociclo (Scarabeo Aprilia 150)
Rilevazione
delle quote
caratteristiche
dei componenti
Modellazione
dei componenti
con l’ausilio del
software
Solidworks
PIASTRA
STELO
RUOTA
FODERO
26/38
Assegnazione delle condizioni di vincolo tra le parti
27/38
Schematizzazione del sistema di sospensione
Il vincolo utilizzato
rappresenta una
combinazione di un
elemento elastico e di uno
smorzatore nella direzione
di scorrimento
Corsa
110 mm
Precarico
176.4 N
Rigidezza
17652 N/m
Smorzamento
425 Ns/m
28/38
agenti
sul sistema:
Derivanti dalForze
contatto
pneumatico-strada
Forza di
attrito
Forza
longitudinale
Coppia di
Forzaresistenza
laterale al
rotolamento
29/38
Forze agenti sul sistema
Derivanti
dall’interazione con
la parte di motociclo
non modellata:
Carico verticale pari
a 1000 N sulla
sommità del perno
del cannotto di
sterzo
30/38
Simulazioni di prova su strada e al banco
Stessi risultati a parità di velocità di avanzamento,
impulso di coppia e di rigidezza trasversale
31/38
Simulazione con il sistema montato al banco
Rotazione dello
sterzo
Velocità
del nastro
Spostamento
laterale
Forza
elastica di
richiamo
regolata da
k
32/38
Simulazione (velocità 20m/s, k=250 N/mm)
Impulso di
coppia allo
sterzo
33/38
Simulazione (velocità 20m/s, k=1000 N/mm)
Impulso di
coppia allo
sterzo
34/38
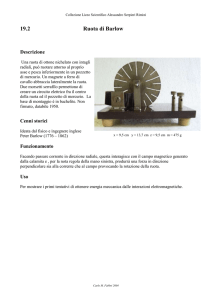
Analisi dei risultati
K=1000 N/mm
20
Angolo di Sterzo [gradi]
Angolo di Sterzo [gradi]
K=250 N/mm
10
0
-10
-20
0
1
2
3
4
5
6
7
8
9
[s]
Oscillazione instabile
10
11
0.2
0.1
0.0
-0.1
-0.2
0
1
2
3
4
5
[s]
Oscillazione stabile
Accordo con i risultati del modello di Roe
35/38
Conclusioni
Sviluppo di un modello multibody a partire dal
modello CAD dell’avantreno dello scooter
Scarabeo
Effettuando simulazioni di prova al banco e su
strada si ottengono i medesimi risultati
E’ stata valutata l’influenza della rigidezza
strutturale dell’avantreno sulla stabilità del modo
wobble
36/38