Meccanica 13
14 aprile 2011
Leggi di Keplero
Accelerazione orbitale per orbite circolari
Il problema dei due corpi. Massa ridotta
Legge di gravitazione di Newton, costante gravitazionale
Formula di Binet, accelerazione orbitale per orbite ellittiche
3a legge di Keplero rivisitata
Momento angolare ed energia cinetica
Analisi energetica qualitativa, velocita` di fuga
Integrazione dell’eq. dell’orbita, 1a legge di Keplero
Leggi di Keplero
• Newton arrivò alla sua legge studiando l’opera di Keplero,
il quale aveva enunciato tre leggi valide per il moto dei
pianeti del sistema solare
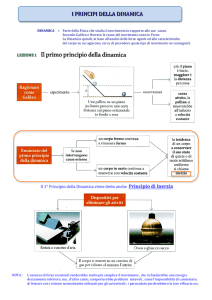
• Prima legge: l’orbita percorsa da un pianeta giace su di un
piano e ha forma di ellisse, di cui il sole occupa uno dei
due fuochi
Leggi di Keplero
• Useremo un sistema di coordinate polari per descrivere l’orbita
del pianeta
• Il raggio vettore r, con origine nel sole e vertice nel pianeta, è
definito dal modulo r e dall’angolo (detto anomalia o azimut)
• Il punto A in cui il pianeta è più lontano dal sole è detto afelio; il
punto B in cui il pianeta è più vicino al sole è detto perielio
• Entrambi son detti apsidi
r
A
B
Leggi di Keplero
• La prima legge si può esprimere matematicamente
1
p1 ecos
r
• Ove p ed e sono due parametri orbitali: e è l’eccentricità
dell’orbita (sempre <1 per un’ellisse)
• Esercizio: esprimere p in funzione degli altri parametri
orbitali analizzando, p.e., il perielio (r=a-ae, =0)
1
p
2
a1 e
Leggi di Keplero
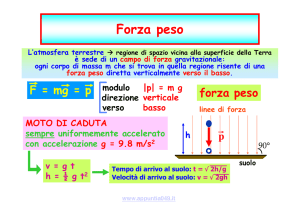
• Seconda legge: l’area “spazzata” dal raggio vettore è
proporzionale al tempo impiegato per spazzarla: A=kt, in
termini infinitesimi: dA=kdt
dA
• Ovvero: la velocità areale è costante
k
dt
• Storicamente fu scoperta per prima
A
B
• Possiamo esprimere
la costante k
mediante l’area e il
periodo
A ab
k
T
T
3a legge di Keplero
• Il quadrato del periodo di rivoluzione di un pianeta
attorno al sole è proporzionale al cubo del semiasse
maggiore dell’orbita
T 2 ka3
• La costante di proporzionalità è uguale per tutti i pianeti
• Una legge analoga vale per il sistema di Giove e i suoi
satelliti
• La costante è uguale per tutti i satelliti (ma è diversa da
quella del sistema Sole-pianeti, come vedremo)
6
Legge di gravitazione
• Non sappiamo come Newton sia giunto alla sua legge
per la forza gravitazionale
• Sappiamo che Hooke era giunto alla conclusione che
l’accelerazione posseduta dai pianeti nella loro
rivoluzione intorno al sole fosse proporzionale
all’inverso del quadrato della distanza tra sole e pianeta
• In forza del fatto che nella 3° legge di Keplero, la
costante e` uguale per tutti i pianeti, alcuni pensavano
anche che il sole fosse responsabile del moto dei
pianeti tramite una ‘forza’ che da esso emanava
7
Legge di gravitazione
• Le considerazioni si limitavano a orbite circolari e si
basavano sull’analisi fatta da Huygens del moto
circolare uniforme e sulla 3a legge di Keplero (valida
in realtà più in generale anche per orbite ellittiche)
• Huygens era riuscito a trovare l’espressione
dell’accelerazione posseduta da un corpo in moto
circolare uniforme
• Nessuno, all’epoca, era in grado di calcolare
l’accelerazione per il moto ellittico, cosa che riuscira`
piu` tardi a Newton
8
Legge di gravitazione
• Il ragionamento era il seguente
• L’accelerazione di un pianeta in moto circolare
uniforme è (detti R il raggio dell’orbita e T il periodo)
4
2
a r 2 R
T
• Applicando la 3a legge di Keplero
4
4
4 1
a 2 R 3 R
T
kR
k R2
9
Legge di gravitazione
• Newton inoltre ebbe l’idea di considerare l’attrazione tra due
corpi come una caratteristica universale, quindi l’attrazione tra
sole e pianeta, tra terra e mela e tra terra e luna erano tutti
casi particolari di una proprietà generale della materia
• Newton quindi paragonò l’accelerazione di una mela sulla
superficie terrestre con quella della luna: se l’accelerazione
dovuta alla ‘forza’ gravitazionale fosse davvero stata
inversamente proporzionale al quadrato della distanza, allora
queste due accelerazioni avrebbero dovuto soddisfare la
seguente relazione
2
aluna rmela
amela rluna
10
Legge di gravitazione
• Stimando l’accelerazione della luna con la formula di Huygens
(rluna=3.84x108 m , Tluna=27.3 giorni=2.36x106 s)
4 2
4 2
8
3
2
aluna 2 rluna
3.84
10
2.72
10
m
/s
6 2
Tluna
2.36 10
• e tenendo conto che amela=g=9.8 m/s2, accelerazione di gravità
e rmela=R=6.37x106 m, raggio della terra, Newton giunse ai
valori
g
aluna
9.8
3603
3
2.72 10
8 2
rluna
3.84 10
3634
6
R 6.37 10
2
11
Legge di gravitazione
• Un risultato indubbiamente molto incoraggiante, ma Newton
non ne fu totalmente soddisfatto, essenzialmente per tre
motivi
• Il primo: i dati a sua disposizione non erano molto accurati ed
aveva ottenuto un accordo numerico meno buono
• Il secondo: aveva supposto che l’orbita lunare fosse circolare
• Il terzo: aveva supposto, ma non giustificato, che la distanza
rilevante tra i corpi fosse quella tra i loro centri, senza tener
conto della loro estensione spaziale
• Molti anni piu` tardi, dopo aver creato il calcolo differenziale,
Newton riuscì a dimostrare questa assunzione nel caso in cui la
distribuzione di materia dei corpi sia isotropa attorno al loro
centro
12
Il problema dei due corpi
• Consideriamo un sistema isolato costituito da due
corpi massicci puntiformi M e m, interagenti con forza
di tipo centrale
• Sia S un sistema di riferimento inerziale in cui
descrivere il sistema dei due corpi
r
r2
r1
• Siano r1 e r2 i vettori
posizione (in S) dei due corpi
• La forza mutua dipende solo
dal vettore r tra i due corpi:
r = r 2 - r1
13
Il problema dei due corpi
• Introduciamo anche il vettore R, posizione del centro
di massa:
Mr1 mr2
R
Mm
r
R
• Le trasformazioni inverse
permettono di esprimere r1 e r2
in funzione di R e r
r2
r1
m
r1 R
r
Mm
M
r2 R
r
Mm
14
Il problema dei due corpi
• Poiché il sistema è isolato, il centro di massa si muove di
moto rettilineo uniforme
dR
const.
dt
• Possiamo sfruttare questo risultato per scegliere un
sistema di riferimento inerziale più conveniente, S’, con
l’origine O’ coincidente con il centro di massa dei due corpi
(i due punti coincidono e traslano assieme)
anche se con abuso di notazione,
• D’ora in poi,
continueremo ad usare gli stessi simboli nel nuovo sistema
S’ (però ora R=0)
15
Il problema dei due corpi
• Trovare la dipendenza di r dal tempo
equivale a risolvere il problema. Infatti,
una volta noto r, le coordinate delle
masse si ottengono (ora R=0)
semplicemente da
m
r1
r
Mm
r2
r1
r
M
r2
r
Mm
• Nel seguito ci serviranno anche le accelerazioni dei due
corpi, che si trovano derivando le posizioni due volte rispetto
M
m
al tempo
a2
a
a1
a
M m
M m
• Ove a e` l’accelerazione della coordinata r
16
Forza newtoniana
• Newton postulò la seguente forma per la forza di
gravitazione
Mm
Mm
F21 G
r
2
rˆ
F12 G
r
2
rˆ
• ove G è una costante indipendente dalla massa
dei corpi interagenti
17
Gravitazione universale
• G è una costante fisica universale di dimensioni (nel
sistema MKS)
• e valore
2
F
L
3 2
1
G
L
T
M
M2
3
m
G 6.67 10
2
kg s
11
•
Fu determinata sperimentalmente per la prima volta da
Cavendish mediante una bilancia di torsione
18
Il problema dei due corpi
• La direzione comune alle forze
passa per il centro di massa:
l’accelerazione di entrambi i corpi è
quindi diretta verso il CM
• Il sole sia il corpo 1 e il pianeta il 2:
r2
r1
Mm
Mm
Fs G 2 rˆ Mas
a
r
Mm
Mm
Mm
ˆ
Fp G 2 r ma p
a
r
Mm
r
Fp
Fs
19
Il problema dei due corpi
Mm
• Introducendo la massa ridotta
Mm
possiamo concludere che il problema dei due
corpi è formalmente equivalente a quello di un
corpo fittizio di massa a distanza r da un
centro di forza fisso
• il corpo fittizio è ‘legato’ a questo centro da una
forza
Mm
F G
r
2
rˆ
r
2
rˆ
e sottoposto ad un’accelerazione a F
20
Determinazione dell’accelerazione
orbitale
• L’accelerazione orbitale del corpo fittizio e`
puramente radiale, mentre la componente
azimutale e` nulla
• Trovata l’accelerazione di questa particella
fittizia e` immediato calcolare le accelerazioni di
sole e pianeta
• Per trovare l’accelerazione orbitale deriviamo la
velocita` espressa in coordinate polari
21
Determinazione dell’accelerazione
orbitale
dv d
dvr
drˆ dv
dˆ
a
vr rˆ vˆ
rˆ vr
ˆ v
dt dt
dt
dt dt
dt
d 2r
dr drˆ dr d
d 2
d dˆ
2 rˆ
r 2 ˆ r
dt
dt dt dt dt
dt
dt dt
d 2 r d 2 dr d
d 2
2 r
r 2 ˆ
rˆ 2
dt
dt dt dt
dt
ar rˆ aˆ
22
Determinazione dell’accelerazione
orbitale
• Poiche’ la forza e` centrale, l’accelerazione azimutale e`
nulla
dr d
d 2
a 2
dt dt
r
dt
2
0
• Riscriviamo l’accelerazione come
dr d
d d 1 d 2 d
a 2
r
r
0
dt dt
dt dt r dt dt
• Ne segue che
2 d
r
H
dt
• Ove H e` una costante, uguale, per la 2a legge di Keplero a
A
H 2
T
23
Determinazione dell’accelerazione
orbitale
d H
2
dt r
• Possiamo dunque scrivere
• E sostituendo nell’accelerazione radiale
d r d
d r H
d dr H 2
ar 2 r
2 r 2 3
dt
dt
dt dt r
dt
r
• Ora cambiamo variabile t->f
2
2
2
2
d dr d d H 2
d dr H H H 2
3
ar
3
2 2
d d dt dt
r
d d r r
r
2 d
H
d
d 1 1 H 2
H2 d2 1 H2
d r r 2 r 3 r 2 d 2 r r 3
24
Determinazione dell’accelerazione
orbitale
• Ricordiamo ora la 1a legge di Keplero
• Ne segue che
d2 1
1
p1 e cos
r
pe cos
2
d r
• Sostituendo nell’accelerazione radiale, troviamo
H2
H2 H2
ar 2 pe cos 3 2 pe cos p1 e cos
r
r
r
H2
2 p
r
1
• Inserendo i valori di H e di p ( p
)
2
a1 e
25
Determinazione dell’accelerazione
orbitale
• Otteniamo infine
2
1
A 1
4 2a 2b 2 1
4 2 a 3
ar
2 2 2
2
2
2
T 2 r2
a1 e T r
T a1 e r
3
a
• Ovvero ar 2 2
r
• ove 2 4 2 T 2 è la velocità angolare media
dell’orbita
ellittica
• Abbiamo dunque per le forze gravitazionali
3
a
F 2 2 rˆ
r
26
3a legge di Keplero rivisitata
• Rivisitiamo la 3a legge di Keplero nella teoria newtoniana
• Abbiamo trovato la forza radiale tra particella fittizia e centro
3
3
Mm
a
Mm
a
di forza
F G 2 a 2 2
2 2
r
r
Mm
r
• Da ciò ne discende
• Ovvero
GMm
2
4
T2
a3
GM m
Mm
2a 3
Mm
newtoniana della 3a legge di Keplero, con
• Che è la versione
costante k pari a
4 2
k
GM m
27
3a legge di Keplero rivisitata
• La teoria di Newton “verifica e smentisce” allo
stesso tempo la 3a legge di Keplero
• La smentisce in quanto la costante che compare
nella legge è diversa da pianeta a pianeta
• La conferma in quanto tale costante è con buona
approssimazione uguale per tutti i pianeti
4 2
4 2
GM m GM
28
Momento angolare
• Calcoliamo il MA totale dei due corpi
L l1 l2 r1 Mv1 r2 mv2
m
m
M
M
r m
v
r M
v
M m
M m
M m
M m
r v
• Esso è uguale al momento angolare del corpo
fittizio
29
Momento angolare
• Poiche’ il sistema e` isolato il momento
angolare si conserva, ne segue che i vettori r e
v stanno sempre nello stesso piano
• Proiettando L lungo il versore perpendicolare
a questo piano, otteniamo
2 d
L rv sin a rv r
dt
v
a
v
vr
r
30
Il momento delle forze
• Calcoliamo il momento delle forze interne,
sfruttando il fatto che la forza è centrale:
r1 F12 r2 F21 r1 F12 r2 F12
r1 r2 F12 r f rr 0
• L’annullarsi del momento delle forze, implica che il
momento angolare sia costante
dL
0
dt
L const.
31
Energia cinetica
• Calcoliamo l’energia cinetica dei due corpi
1
1
2
K Mv1 mv 22
2
2
2
2
1 M
1 2
1 m
M
v m
v v
2 M m 2 M m 2
• Essa è uguale all’energia cinetica del corpo fittizio
• Esprimiamo la velocità in termini delle componenti
radiale e azimutale:
2
2
1
1
dr
2
2
2 d
K v r v r
dt
2
2 dt
32
Energia
• L’energia meccanica si conserva, perche’ la
forza gravitazionale è conservativa
E K V const.
• Sostituendo le espressioni di T e V:
2
2
1 dr
2 d
E r
2 dt
dt r
33
Energia
• Esprimendo la velocità azimutale in funzione di L e r
2
1 dr
L2
E
2
2 dt 2 r
r
• Il primo termine del membro di destra è l’energia cinetica
radiale, il secondo termine è l’energia cinetica azimutale, il
terzo termine è l’energia potenziale
• Formalmente
possiamo pensare il secondo termine come
energia potenziale, aggiuntiva a quella gravitazionale, della
particella e il primo termine come tutta l’energia cinetica
• Questo modo di vedere ha il vantaggio di ridurre il numero
di dimensioni del problema da due a uno
34
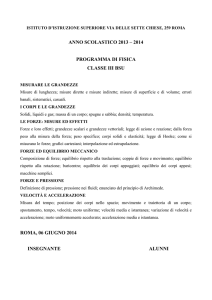
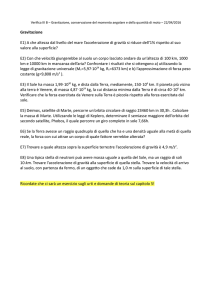
Energia
• Nella figura abbiamo
tracciato le due energie
potenziali con linee
tratteggiate e la loro
somma Vtot con linea
continua
• L’energia totale E è una
costante (retta
tratteggiata)
• La differenza tra E e Vtot
è l’energia cinetica
(freccia)
1 2
L2
E v
2
2
2r
r
r
35
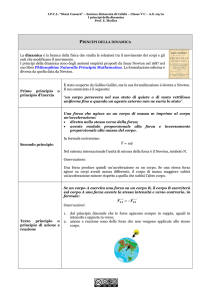
Analisi qualitativa
• Per E>0, r assume un
valore minimo ma può
assumere valori
arbitrariamente grandi:
l’orbita è illimitata
E>0
T
r
36
Analisi qualitativa
• Per E<0, r è compreso tra
un valore minimo e uno
massimo: l’orbita è
limitata (e chiusa)
r
T
E<0
37
Velocita` di fuga
• L’analisi precedente ci permette di concludere
che affinche’ il corpo riesca a sfuggire al
centro di forza occorre che la sua energia sia
almeno uguale a zero
1 2
E v 0
2
r
• In termini di velocita`, questa dev’essere
almeno uguale alla velocita` di fuga
2
v
v fuga
r
Da tradurre in
velocita` di fuga
per il corpo 2
38
Corpo fittizio e corpi reali
• Un caso particolare ma molto importante e` quello in
cui uno dei due corpi e` molto piu` massiccio
dell’altro, p.e. nei sistemi terra-missile e sole-pianeti
m
m
• Allora
M
r1
r r
r2
r r
M m
M m
M
• Cioe` la massa minore si comporta con buona
approssimazione come la massa ridotta
• La massa maggiore rimane praticamente ferma
39
Velocita` di fuga
• La velocita` di fuga del corpo leggero e`
M
2GMmM m
2GM
v2
vv
M m
Mmr
r
40
Integrazione dell’eq. del moto
• Torniamo all’espressione dell’energia
2
1 dr
L2
E
2
2 dt 2 r
r
• Esplicitando rispetto alla derivata di r:
dr
2E 2 1 L2 1
2 2
dt
r r
• Risolvere questa equazione ci darebbe la legge
oraria di r (e quindi di )
41
Integrazione dell’eq. del moto
• È più facile però determinare r in funzione
dell’angolo , in questo modo otteniamo
l’equazione dell’orbita
• Se a tal fine riscriviamo la velocità radiale come
dr dr d dr r 2
dt d dt d L
• Otteniamo
dr
2E 2 2
r
2 r
2 r 1
d
L
L
42
Integrazione dell’equazione
• Quest’equazione si può risolvere per
quadrature:
d
dr
2 E 2 2
r
2 r
2 r 1
L
L
43
Integrazione dell’equazione
• L’integrando si può riportare ad una forma
standard con la sostituzione u=1/r
d
,
du
2E 2
2
2 u u
2
L
L
• L’integrale è della forma
b 2cu
1
arccos
2
2
c
b 4ac
a bu cu
du
44
Integrazione dell’equazione
L2 u
1
• E quindi
k
'
arccos
2 EL2
1
2
k
• Tornando alla variabile r
2
1
2 EL
'
2 1 1
cos
2
r L
• Ove l’origine degli angoli può convenientemente
essere scelta in modo che ’=0
45
1a legge di Keplero
• L’espressione precedente è della forma
1
p1 ecos
r
cioè proprio la forma della 1a legge di Keplero
• Inoltre l’eccentricità è data da
e 1
2EL2
2
46
Eccentricità
• Per un’iperbole E>0 e l’eccentricità è >1
e 1
2EL2
2
1
2 E L2
2
1
• Per un’ellisse E<0 l’eccentricità è <1
e 1
2EL2
2
1
2 E L2
2
1
47
Il problema degli n corpi
• Se si hanno tre o più corpi, qualunque sia la
forza d’interazione, il problema non
ammette, in generale, una soluzione
analitica
• Teoria delle perturbazioni
• Problema della stabilità del sistema solare
48