ITIS SAVIGNANO S/R
LABORATORIO
CASADEI EMANUELE
DI SISTEMI
4ª-B
E
AUTOMAZIONE DATA 3/10/01
INDUSTRIALE
RELAZIONE N 2
OGGETTO: Analisi del circuito di comando e di potenza per il funzionamento di un motore
asincrono trifase.
SCOPO: conoscenza ed uso di un quadro di comando.
NOTIZIE sui MATERIALI, MACCHINE e sugli STRUMENTI di misura:
Linea di alimentazione
2 teleruttori (AGUT)
2 interruttori magnetotermici (AGUT)
serie di contatti ausiliari (pulsanti, morsettiera, lampade spia)
cassetta di comando con chiusura di sicurezza:
interruttore generale di sicurezza;
5 fusibili (3 di fase e 2 di protezione);
trasformatore abbassatore;
quadro lampade 3 spie (avanti, indietro, arresto).
Motore asincrono trifase:
dati di terga:
HP = 1,5 CV (Potenza sviluppata, Pu);
P = 1,1 kW (potenza assorbita dalla linea, Pe);
Giri: 1400
giri
;
min .
f = 50 Hz;
V 380 V
;
I 2,95 A
V 660V
;
I 1,7 A
IP 44
Cos = 0,79
Classe d’isolamento: B;
PAG. N
1
Trasformatore monofase:
dati di targa:
220V
;
24V
V=
P = 200 VA;
f = 50/60 HZ;
classe d’isolamento: E,
tropicalizzato;
grado di protezione: IP 00;
tachimetro digitale: tolleranza: 1 giro.
CENNI TEORICI:
Corrente alternata: (AC)
caratterizzata dal fatto di alternare periodicamente il suo verso di scorrimento nei conduttori (e
dunque nei circuiti). La variazione è dovuta al cambiamento di verso di percorrenza del conduttore
da parte delle cariche elettriche (elettroni);
Induzione magnetica:
Un campo magnetico variabile concatenato ad una spira genera nella stessa spira una corrente.
Questo fenomeno, studiato da Faraday, Neumann e Lenz, si dice induzione magnetica e la corrente
generata si dice corrente indotta.
Trasformatore:
Macchina elettrica statica capace di trasferire, sfruttando il fenomeno dell'induzione
elettromagnetica, energia elettrica a corrente alternata da un circuito a un altro modificandone le
caratteristiche. Schematicamente un trasformatore è costituito da due avvolgimenti, ciascuno
formato da un certo numero di spire di filo conduttore avvolte attorno a un nucleo di ferro di elevata
permeabilità magnetica, dei quali uno, detto primario, riceve energia dalla linea di alimentazione. Il
campo generato in tal modo si concatena all'altro avvolgimento, che chiameremo secondario, e che
PAG. N
2
diviene sede di una tensione indotta. La tensione generata sul circuito secondario sarà di intensità
maggiore o minore della tensione del circuito primario a seconda del numero di spire.
Il rapporto tra le forze elettromotrici nei due avvolgimenti (a vuoto) è uguale a quello dei numeri di
spire
V2 N 2
.
V 1 N1
Il trasformatore può essere:
Elevatore: che innalza il voltaggio e conseguentemente riduce la corrente, in corrispondenza
della centrale di produzione dell'energia elettrica. Questo perché le “perdite nel ferro” lungo le
linee elettriche sono proporzionali al prodotto del quadrato dell'intensità di corrente e della
resistenza della linea stessa P R * I 2 .
Abbassatori: riducono il voltaggio generalmente per le abitazioni a 220 V.
Il nucleo di un trasformatore è costituito da materiale ferromagnetico di elevata permeabilità
magnetica , con area di isteresi magnetica piccola per diminuire le perdite di calore (nel rame). Esso
si realizza chiudendo con una barra metallica un conduttore a U. Il tutto formato da lamine di ferro
sovrapposte e separate da un isolante (carta, vernice). Altrimenti un nucleo massiccio sarebbe sede,
a causa della variazioni del flusso magnetico, di correnti indotte, dette correnti di Foucault o
correnti parassite, che produrrebbero riscaldamento con conseguente dissipazione di energia per
effetto Joule (perdita nel rame).
Rendimento: è tanto maggiore quanto minore è la quantità di energia dissipata sotto forma di calore
durante il processo di trasformazione, e supera generalmente il 99% grazie all'uso di particolari
leghe di acciaio che facilitano l'accoppiamento dei campi magnetici indotti tra l'avvolgimento
primario e il secondario.
Motore asincrono trifase:
Macchina elettrica rotante, che converte energia elettrica in energia meccanica; possedendo un moto
di rotazione, oltre alle perdite nel rame e nel ferro, ci saranno anche quelle meccaniche. Viene
chiamato asincrono perché ha congegni che non funzionano in sincronia, cioè hanno 2 velocità
diverse. Questo motore è costituito sostanzialmente da:
Statore: il quale è formato da tre solenoidi collegati spazialmente a 120o e connessi alle tre fasi;
PAG. N
3
Rotore: è posizionato al suo interno sorretto da cuscinetti che lo tengono in asse. Questo è
formato da degli avvolgimenti rotorici cortocircuitati capaci di aumentare l’azione di attrazione.
Il rotore può essere costruito in vari modi:
A gabbia di scoiattolo;
A doppia gabbia di scoiattolo;
Avvolto.
Principio generale di funzionamento:
Gli avvolgimenti trifasi statorici, percorsi da corrente trifase sinusoidale, generano un campo
magnetico rotante di intensità B [Wb /m2] la cui velocità n1 [g / min] è costante e dipende dalla
frequenza di alimentazione f [Hz] e dal numero p di coppie polari secondo la relazione:
n1
f * 60 giri
p min
La velocità del campo d'indotto rispetto a quello del rotore vale:
S * n1 n1 n2
Immaginando inizialmente il rotore fermo, n2 = 0 , tale campo rotante, taglierà trasversalmente i
conduttori rotorici che costituiscono i lati delle spire chiuse in cortocircuito. Nelle spire si
svilupperà, grazie alla legge di Newman-Lenz dell'induzione elettromagnetica, una forza
elettromotrice indotta che farà circolare una corrente. Tale corrente interagirà col campo magnetico
rotante induttore dando luogo a delle forze elettromagnetiche dirette in modo tale da formare una
coppia motrice. A causa della coppia motrice il rotore si metterà in movimento nello stesso senso
del campo rotante. Quando esso è fermo si ha un alto valore induttivo per fare scorrere meglio la
corrente, poi mano a mano che il rotore acquista velocità, sotto l'azione della coppia, diminuirà: la
velocità con la quale il campo rotante taglia i conduttori del rotore e con essa la coppia motrice e le
correnti rotoriche, perché il rotore diventa fortemente resistivo. Idealmente, se si trascurano gli
attriti, la coppia motrice si annulla quando la velocità n2 del rotore eguaglia la velocità n1 del campo
rotante. In realtà, anche se il motore è a vuoto (cioè senza coppie frenanti applicate al suo albero), le
perdite meccaniche dovute all'attrito nei cuscinetti e dell'aria, fanno si che sia sempre n2 < n1 e che
quindi permanga la piccola coppia motrice necessaria a vincere la coppia resistente. Le due velocità
si differenziano per un fattore di scorrimento che dipende dalla tecnologia di costruzione, deve
essere:
PAG. N
4
S 00
n1 n2
*100 2 5 0 0 .
n1
Rendimento:
un motore asincrono trifase preleva dalla linea una potenza, entrante od assorbita, pari a:
Pa 3 *V * I * cos ;
di questa potenza assorbita una parte è dissipata per le perdite, le quali si determinano per vari
motivi:
_
Meccaniche: sviluppate per attrito nei cuscinetti e per la ventilazione;
_
Nel rame: dovute al effetto Joule, che determina un riscaldamento al passaggio della
corrente nei tre solenoidi statorici;
_
Nel ferro: causate per il principio delle corrente parassite od Focoult, per le quali è
necessario costruire, sia la struttura che supporta gli avvolgimenti statorici che il rotore, con
la tecnica dei lamierini.
Per questi inconvenienti è necessario precisare che il rendimento si trova:
Pu
; inoltre, il rendimento dei motori asincroni varia dal 70% al 95%, e quando i
Pe Perdite
carichi sono ridotti esso diminuisce fino a diventare zero nella prova a vuoto (è ovvio perché non
c’è una coppia torsionale in quanto l’albero ruota liberamente).
la potenza del motore fornita in uscita è: Pu C *
oppure
* Pe
motore o forza torsionale e “” la velocità angolare calcolata come: n2 *
dove “C” è la coppia
2
.
60
Fusibile:
Dispositivo di sicurezza utilizzato per proteggere i circuiti elettrici dagli effetti di correnti troppo
intense, come nel caso del cortocircuito. Quest’ultimo è un fenomeno determinato da un notevole
abbassamento della resistenza, quindi, per mantenere la tensione costante, la corrente subisce un
innalzamento repentino ed elevatissimo. Tuttavia i circuiti sono dimensionati per resistere ad un
determinato valore di corrente, che, se viene superato determina un danno ai circuiti. Per evitare
questi inconvenienti si ricorre al fusibile. Esso è costituito da un filo di materiale conduttore con
PAG. N
5
temperatura di fusione relativamente bassa (piombo, ad esempio), viene inserito nel circuito in
modo da essere attraversato dalla corrente (collegamento in serie); se questa supera un valore
prefissato, il riscaldamento, che ha luogo per effetto Joule, provoca la fusione dell'elemento fusibile
e quindi l'interruzione del circuito.
Nei fusibili standard, la parte attiva è contenuta in una capsula cilindrica di vetro o di materiale
ceramico. Alcuni fusibili, detti ritardati, prima di fondere sopportano un leggero sovraccarico di
corrente: trovano impiego in dispositivi in cui è facile che si verifichino improvvisi, ma
controllabili, aumenti di corrente. Un altro tipo di fusibile contiene più di un elemento attivo:
quando se ne fonde uno, se ne può azionare un altro senza dover sostituire l'intero dispositivo.
Simbolo grafico
di un fusibile
Interruttore magnetotermico:
La loro funzione è quella di protezione del circuito in cui sono inseriti dal sovraccarico
(sovratensione). Questo fenomeno si verifica quando ci sono ad esempio troppi utilizzatori collegati
alla linea con un conseguente riscaldamento per effetto Joule, il quale deteriora nel tempo gli
isolanti dei conduttori. Per evitare questo risultato si costruisce una lamina composta da due metalli
con coefficienti di dilatazione diversi. Essendo il MT regolato sulla corrente nominale, alla quale i
conduttori possono resistere, se essa viene superata la lamina si curva, tanto da staccare il contatto e
rompere l’arco elettrico.
Il MT può essere utilizzato anche come salvamotore, con la differenza che la lamina ha uno
spessore maggiore per dare tempo al motore di vincere le coppie di spunto, altrimenti le alte
correnti che si hanno all’avviamento riscalderebbero subito la lamina, che staccando il contatto non
farebbe partire il motore.
PAG. N
6
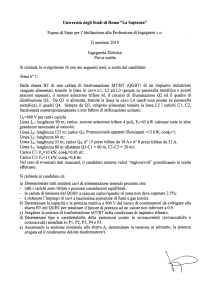
Tecnica costruttiva di un
funzionamento di un
dispositivo magnetotermico
interruttore magnetotermico
Simbolo grafico
di un MT
Rottura arco
elettrico
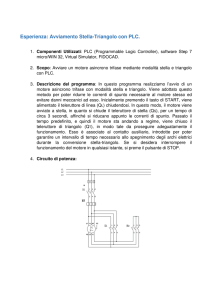
Caratteristica di intervento di un interruttore MAGNETOTERMICO:
I dispositivi magnetotermici aprono il circuito in un tempo che è tanto più breve quanto maggiore è
la corrente che supera il loro valore nominale.
Il valore nominale corrisponde alla potenza massima prevista in quel circuito od impianto ed è
ovviamente, a parità di tensione, tanto maggiore quanto maggiore è la potenza.
La curva mostra la caratteristica d’intervento nel tempo dei dispositivi magnetotermici (interruttori).
In questi ultimi si nota che quando la corrente supera il valore di 10 volte la corrente nominale, il
tempo d’intervento diventa molto piccolo e costante (circa un centesimo di secondo).
t
[s]
1000
100
10
5
1
0,1
0,01
5
In
I 5sec
10In
I [A]
PAG. N
7
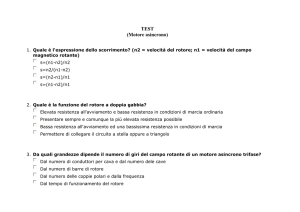
Se si pensa di utilizzare questi dispositivi come protezione contro i contatti indiretti, quindi per
limitare le tensioni sulle masse, bisogna fare le considerazioni seguenti:
La curva di sicurezza fornisce il tempo massimo per cui una persona può sopportare una data
tensione.
T [sec]
10
1
Zona di
pericolo
0,1
sicurezza
0,01
I [mA]
10
100
1000
Moltiplicando i valori di corrente, di una caratteristica di intervento di un MT, per la resistenza di
terra si trova la durata di una data tensione sulle “masse”.
Le combinazioni resistenza di terra – dispositivo, che soddisfano i requisiti di sicurezza sono quelle
che stanno sotto la curva di sicurezza.
Se si considera ad esempio la corrente di intervento a 5 secondi del dispositivo, poiché 5 secondi è
il valore massimo per cui il corpo umano può sopportare la tensione limite VL, si può stabilire il
criterio per coordinare la resistenza di terra con il dispositivo di protezione.
Deve essere:
RT * I 5s < VL
Poiché la corrente di intervento a 5 secondi dei dispositivi magnetotermici è abbastanza
superiore alla corrente nominale del dispositivo, (che corrisponde alla corrente nominale
dell'impianto, essendo VL= 50 V), per ottenere la sicurezza occorrerebbe ricorrere agli interruttori
differenziali d'altra parte i dispositivi magnetotermici non sono nati per proteggere le persone dai
contatti indiretti, ma per proteggere l'impianto dalle sovracorrenti.
Teleruttore:
è chiamato anche interruttore elettrico di controllo od avviamento ed è un dispositivo elettromeccanico, il tipo più diffuso è costituito da un pulsante che manda un comando ad un
PAG. N
8
elettromagnete (bobina K1)
che, percorso da una corrente elettrica in entrata, aziona
meccanicamente uno o più contatti elettrici di uscita.
Simbolo grafico di un teleruttore
start
K1
Tachimetro:
Strumento indicatore di velocità, che in realtà si differenzia in diverse realizzazioni. Il tachimetro
infatti può essere collocato su veicoli terrestri (ad esempio un'automobile) per fornire la velocità
in chilometri all'ora, sulle parti rotanti di meccanismi (ad esempio un albero motore) per indicare
la velocità di rotazione in giri al minuto, su imbarcazioni o su aeromobili.
PREPARAZIONE DELL’ESPERIENZA:
In questa prova ho preparato essenzialmente due circuiti; uno di comando ed uno di potenza, che in
realtà costituiscono un unico quadro elettrico che comanda un motore asincrono trifase.
Supponiamo dalla linea, si preleverà corrente prima assicurandosi con un sezionatore o meglio
interruttore generale, dove sono posizionati 5 fusibili: 3 per ogni fase e 2 per la protezione del
trasformatore (uno in entrata alla 220V ed uno in uscita alla 24V). il trasformatore fornisce una
corrente abbassata al “circuito di comando”, dove si ha un sistema di pulsanti con una linea di
protezione costituita da dei magnetotermici. Il pulsante di arresto precede i MT che regolano la
corrente ai due pulsanti rimanenti: quelli di eccitazione dei 2 teleruttori. In uscita da questi congegni
ci si collega alle tre lampade di segnalazione. Infine a seconda di quale teleruttore è stato eccitato,
un sezionatore manda corrente (trifase) al motore che farà eseguire l’operazione richiesta. In realtà
la cosa è più semplice in quanto abbiamo un alimentatore generale che azionato manda corrente alla
cassetta di comando chiusa, sulla quale è installato un sezionatore generale a rotazione che rompe il
passaggio di corrente quando la si voglia aprire e i pulsanti con le relative lampade d’indicazione.
Al suo interno sono posizionati infatti elementi a basso grado di protezione come: i 6 fusibili, il
trasformatore, i magneto termici. Questo è stato eseguito per seguire le norme di sicurezza, perciò
anche tutti i conduttori che portano l’eccitazione ai teleruttori e l’alimentazione al motore elettrico
sono stesi in un sistema di canette o tubazioni rigide.
PAG. N
9
DESCRIZIONE DELL’ESPERIENZA:
in questa esperienza, allo scopo di conoscere ed usare un quadro di comando ho preparato gli
elementi elettrici finora descritti, poi ho alzato l’interruttore generale, azionato il sezionatore della
scatola di sicurezza in modo che il trasformatore fornisse al circuito di comando una tensione di
24V. subito dopo ho impostato, siccome possibile, il motore con collegamento delle fasi a stella, per
poi attivare il pulsante con l’indicazione “AVANTI”[S2]. Così facendo eccito il teleruttore K1 e
disattivo il K2 per la marcia indietro. Come risultato ho la rotazione dell’albero motore nel verso
desiderato; su di esso è stato applicato un rettangolino adesivo di un materiale adibito a riflettere i
segnali mandati dal tachimetro digitale grazie al quale ho rilevato la velocità di rotazione in giri al
minuto = 1499 giri/min. . la stessa operazione l’ho eseguita sperimentando la “partenza” del motore
con collegamento a triangolo e risulta uguale il no 1499 giri/min. . Ora volendo fare ruotare il
motore in senso opposto devo: spingere il tasto di “ARRESTO”, altrimenti la corrente non riesce ad
eccitare il teleruttore K2, perché K1 non permette il suo afflusso in quella direzione; quindi azionare
il tasto di “MARCIA IN DIETRO” [S3] che va ad eccitare K2. L’esito è lo stesso solo che l’albero
ruota nell’altro verso, così che ho prelevato nuovamente il numero di giri che rimane, a regime,
sempre invariato = 1499 giri/min. .
SCHEMA del QUADRO ELETTRICO UTILIZZATO, DIVISO in CIRCUITO di POTENZA
e di COMANDO:
CONCLUSIONI:
la prova è stata effettuata sottoponendo un CIRCUITO ad una tensione di 380V in modo da,
sfruttando i congegni elettrici e la corrente alternata, comandare un motore asincrono trifase. Questo
allo scopo di definire sperimentalmente la funzionalità, le caratteristiche ed il metodo di utilizzo di
vari elementi basilari dell’impiantistica. Poi ho avuto la possibilità di confrontare il valore, della
velocità di rotazione dell’albero motore, ottenuto tramite rilevazione sperimentalmente, al valore
dichiarato nei dati di targa che tuttavia risulta diverso, con un errore di 99giri/min. 1 (tolleranza
del tachimetro). Non è possibile calcolare il rendimento perché non c’è la Coppia motore non
essendo applicato nessun carico, in verità essa è presente ma in valori piccolissimi, in quanto gli
attriti dei cuscinetti e dell’aria favoriscono una resistenza grazie alla quale, le correnti indotte
creano una minima coppia sufficiente a mantenere in rotazione l’albero senza che si raggiunga la
sincronia tra velocità del campo magnetico rotante di statore- e velocità del rotore. Durante la prova
ho infine dimostrato che la partenza di un motore asincrono trifase “a triangolo” esercita in uscita
PAG. N 10
una coppia maggiore ma assorbe 3 volte la corrente normalmente assorbita da uno collegato a stella.
In conclusione posso affermare che la prova ha permesso di potenziare le nostre conoscenze in
campo elettromeccanico di ampio utilizzo; questo perché la nostra era una prova con la finalità di
arricchirsi e conoscere.
PAG. N 11