a.s. 2015/16 Programma svolto di “Sistemi e Automazione” – 5MM1 – Meccanici - pag 1 di 2
ISTITUTO TECNICO INDUSTRIALE STATALE “MAGISTRI CUMACINI” - COMO
PROGRAMMA SVOLTO DI SISTEMI E AUTOMAZIONE INDUSTRIALE A.S. 2015/2016
Classe 5MM1 – MECCANICI
prof Balzaretti Sergio, prof Averta Francesco
Logica, circuiti elettrici e pneumatici
La sicurezza nel laboratorio: utilizzo dei pannelli pneumatici, elettropneumatici e del PLC.
Ripasso della logica (YES, NOT, OR, AND, XOR) e dei circuiti pneumatici ed elettrici: il
relè, le resistenze, i conduttori, gli isolanti, le bobine e le valvole pneumatiche. Il circuito di
autoritenuta: memoria set/reset. Equazioni, sequenze semplici e con i segnali bloccanti:
tecnica dei collegamenti e cascata pneumatica ed elettrica; circuiti teorici e collaudo pratico
ai pannelli.
PLC e programmazione
Il PLC: struttura generale; schema elettrico esterno ed interno; alimentatore con il ponte di
diodi; condensatore e stabilizzatore; processore; memoria; clock; BUS dei dati e degli
indirizzi; collegamento degli ingressi analogici e digitali e delle uscite con i relativi codici: il
comune; il foto accoppiatore: diodo e transistor, relè, triac negli Omron C20 e CPM1; i
vantaggi rispetto alla logica cablata; il diagramma ladder e il linguaggio di programmazione
da tastiera o da pc (blocchi); relè interni ed esterni; il temporizzatore e il contatore
Sistemi
Circuito RLC: studio della risposta del sistema in funzione della frequenza, concetti generali
sui filtri; la funzione di trasferimento di un blocco e di sistemi serie o parallelo. Il nodo e la
retroazione negativa. Sistemi attivi e passivi.
Regolazione PID: significato del termine proporzionale, integratore e derivatore, schemi e
diagrammi riferiti alla Matematica; esempi di applicazione pratica (controllo del livello di un
serbatoio, della velocità di un veicolo, della temperatura in una abitazione; il regolatore di
Watt).
Segnali
Analisi dei segnali nel dominio del tempo e della frequenza: esempi e diagrammi; cenni alla
trasformata di Laplace e di Fourier (utilità pratica) nello studio delle armoniche: lo spettro
(vibrazioni nelle macchine, trasmissione dei segnali).
Risposta dei sistemi ai segnali: onda sinusoidale, onda quadra, rampa, gradino: analogia
con i sistemi meccanici (massa, molla, ammortizzatore e la risonanza).
Convertitori analogico digitali e digitale analogici (DAC).
Trasduttori
I trasduttori: sensori, circuito condizionatore del segnale e taratura; la misura delle
grandezze fisiche, sensibilità, risoluzione, linearità, offset, ripetibilità, isteresi, errore,
invasività; risposta statica e dinamica.
Sensori e trasduttori attivi e passivi: campo di misura, caratteristica. Trasmissione dei
segnali: tensione e loop di corrente, in ampiezza, in frequenza e in digitale. La retroazione
nei trasduttori.
Sensori analogici: potenziometro lineare e angolare, caratteristiche e linearità in uscita.
Trasduttori elettromagnetici: il resolver: principio di funzionamento con il campo
elettromagnetico indotto, le componenti seno e coseno; il syncro; l'inductosyn; il
trasformatore differenziale; trasduttori capacitivi.
Trasduttori digitali lineari e angolari: encoder assoluto e incrementale, vantaggi, svantaggi
ed errori nella lettura dei codici; sistemi di lettura della posizione; applicazione ai sistemi
a.s. 2015/16 Programma svolto di “Sistemi e Automazione” – 5MM1 – Meccanici - pag 2 di 2
diretti o tramite vite senza fine.
Trasduttori di velocità: dinamo, alternatore, encoder, ad effetto Hall.
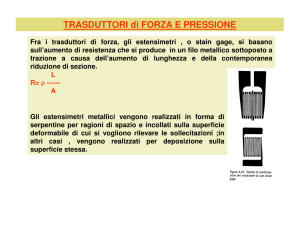
Il ponte di Wheatstone nel bilanciamento dei segnali
L'estensimetro e le relative applicazioni meccaniche (sforzi e deformazioni) e nei misuratori
differenziali di pressione.
Trasduttori piezoelettrici: gli accelerometri.
Il pressostato. I misuratori di livello (capacitivi, resistivi, ad ultrasuoni, a microonde).
Trasduttori di portata: tubo di Venturi, a turbina, a filo caldo.
Trasduttori di temperatura: termoresistenze, termistori (NTC e PTC), termocoppie.
Robotica
I robot cartesiani, polari, cilindrici, sferici e SCARA: gradi di libertà e volume di lavoro.
La matrice di rototraslazione nel piano dal sistema locale al sistema globale (problema
cinematico diretto).
Schemi generali sulla meccanica dei robot.
Precisione e ripetibilità.
APPLICAZIONI E STRUMENTI: spiegazione alla lavagna di tutti gli argomenti tradizionali
affrontati nel programma (schemi, formule, principi); studio a casa e rielaborazione degli
appunti presi in classe; distribuzione di schede e documentazione per la parte pratica delle
esercitazioni sui circuiti elettrici realizzati ai pannelli didattici e convertiti al PLC; esercizi in
classe e in laboratorio; interrogazioni e verifiche scritte (preparazione alla Terza Prova) e di
laboratorio.
Libro di testo: Sistemi ed automazione industriale - Giovanni Saba - Loescher
Como, data: ____________
I rappresentanti (Cognome, Nome, Firma)
Gli insegnanti
Prof. Sergio Balzaretti
____________________________________
____________________
Prof Francesco Averta
____________________________________
____________________