2U
Id
V1
Vr
+ ir
Vs
+ is
Vt
+ it
V3
rs
rt
st
sr
tr
ts
vd (t)
V5
0
T t
T/6
- 2U
V4
V6
V1
V6
V2
V1
V2
Id
V3
V2
V3
V4
V5
V4
V5
V6
ir (t)
T
0
t
T/6
6
Vd
T
T /6
/6
T /12
6
3
v
(
t
)
dt
2
U
cos(
t
)
dt
d
2 U cos(t )dt
T
0
T /12
/6
3
3
2 U (sin / 6 sin / 6)
2U
T
If
1 2
i f (t )dt
T 0
2
T
T /3
2
i f (t )dt
0
2 2
Id
3
2
Id
3
2U
Id
V1
Vr
+ ir
Vs
+ is
Vt
+ it
V3
rs
rt
st
sr
tr
ts
V5
0
t
6
- 2U
V4
V6
V1
V6
V2
I
0
6
Vd
T
T /6
V1
V2
V3
V2
V3
V4
ir (t)
T /12 /
6
v
(
t
)
dt
2 U cos(t )dt
0 d
T T /12 /
3
3 2 U cos
2 U sin sin
6
6
V5
V4
V5
V6
t
Id
dis
di
t
dt
dt
di
di
di
di
v vt
v s Lc s vt Lc t vt Lc s Lc s s
dt
dt
dt
dt
2
is it I d
rs
rt
rr
s
t=t*
t
+
Vr
*
i r =Id
is
Vs
+
-Lc di s
dt
it
Vt
+
di
v vt
vd v r v s Lc s v r s
dt
2
v vt v rs v rt
v
v
r r s
2 2
2
2
vd
i s ( I d it )
di
v st 2U sin (t t 0 ) 2 L s
dt
2U
is (t )
cos(t t0 ),C t t *
2L
it ( I d is )
[A]
[V]
400
300
-is (IV6 )
-it (IV2 )
200
100
0
V*st /40
-100
Vst /20
-200
35
40
45
50
55
Created using UNREGISTERED Top Draw 3.10 May 2,'97 2:48:48 PM
t [ms] 60
Id
V1
Lc
Vr
+
Vs
+
is
Vt
+
it
V3
V5
ir
u
Vrs
Vst
A
V6
V4
V2
t 0 t*
u
A
2U
2
v vrt
vrt rs
dt
2
u
Vd
sin tdt
Vrt
u
u
vrt vrs
v
dt st dt
2
2
2
U cos cos( u )
2
A
A
3 U
cos cos( u)
T /6 /3 2
t
300
200
200
150
Vd
100
100
Vrt
Vrs
0
-100
Vrs
Vrt
50
Vst
0
Vd
is
Vst
-50
u
-200
is
-100
-300
u
-150
15
20
(file comm.adf; x-var t) Vrs
Vst
Vrt
25
Is
30
[ms]
300
200
35
22.5
23.5
(file comm.adf; x-var t) Vrs
Vst
24.5 [ms]
Vrt Is
25.5
200
Vd
Vrs
150
Vst
Vrt
100
100
Vrt
50
0
-200
0
is
-100
-50
u
-300
0.0975
0.1025
(file comm.adf; x-var t) Vrs
Vrs
Vst
Vst
-100
0.1075
Vrt Is
0.1125
[s]
is
u
-150
0.1175
0.1045
0.1055
(file comm.adf; x-var t) Vrs Vst
[s]
Vrt Is
0.1065
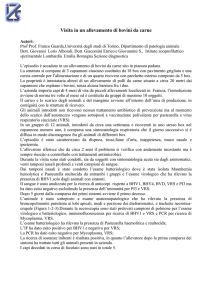
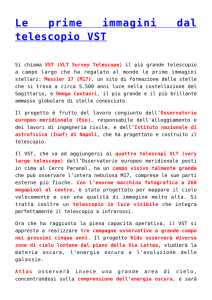
Legame tra , u e Id
dall’espressione di is(t)
is (t )
2U
cos(t t0 ),C t t *
2L
si possono scegliere le costanti in modo da ottenere:
2U
cos (t t0 ) cos (t * t0 ) I d
2L
all’inizio della commutazione cioè per t t0 deve essere i s (t ) I d da cui:
is (t )
t t0
per ~
t t 0 (u ) / , cioè al termine della commutazione, si ha:
2U
cos(u ) cos I d
0 is (~
t)
2L
e quindi (posto X=L):
Id
U
cos cos( u)
2X
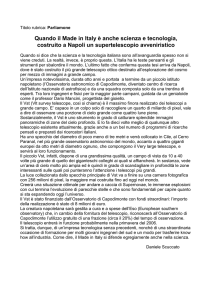
Vd / I d
3 U 2X 3
X cos tan te Rx
2 U
3
Xc
Vd
caduta dovuta
alle valvole
V'd 0
Vd0
+
caduta dovuta
ad R x
Vd0 cos
~
'
Vd0
cdt delle valvole Vd0
Id
Vd 0
rx
3
X
RDCn
3
2U
U n2
3 xZ ACn 3 Pn U n2
3
x
x
0
.
5
x 0.5 x
2
2
RDCn Vd 0 Pn
3
3
2U n
Funzionam. da
raddrizzatore
Vd
-Vi
Vo cos 1
Vo cos 2
Vo cos 3
Funzionam.
da invertitore
u
u
Vo cos 4
-Vo cos 2
-Vo cos 1
crescenti
I
d
crescenti
Id
V1
Lc
Vr
+
Vs
+
is
Vt
+
it
V3
V5
2U
ir
0
V6
V4
V2
- 2U
u
300
200
u
Vrs
150
Vrs
100
Vrt
Vst
Vrt
u
Vrt
50
100
0
0
-50
is
-100
-100
-200
Vd
-300
0.300
0.305
(file comm2.adf; x-var t) Vrs
Vst
-150
u
0.310
Vrt Is
0.315
Vl
[s]
Vst
is
Vd
-200
0.320 0.3115
0.3125
(file comm2.adf; x-var t) Vrs Vst
Vrs
[s]
Vrt
0.3135
Is Vl
Vst
3 X
Id
Vd Vd 0 cos
+
Vd
Vd0 cos
3
Vd Vd 0 cos
Id
3 X
+
V d0 cos
Id
X I d Vd 0 cos
Vi
3
X Id
3X
Vd0 cos
+
-V d
Vi Vd 0 cos
3
X Id
3
X Id
Id
u
U
cos cos( u)
2X
u
Vd
=-
=-(+u)
- 3
X
2U cos
3
XI d
3 U
cos cos( u)
2
V
V
d 0 cos cos( u ) d 0 (cos cos )
2
2
Id
-Vd
V d0 cos
+
Vd
3
2U cos
Vd 0
V
(cos cos ) Vd 0 cos d 0 (cos cos )
2
2
U
cos cos( u)
2X
Vd 0
(cos cos )
3X 2
3X
Id
Id
Vi
3
- 3
X
Vd0 cos
Vd 0
(cos
cos
)
2
+
Vi Vd Vd 0 cos
3
XI d
-2Rx
V d0 cos
+
Rx
Id
V d0 cos
R x= 3 X
Vi
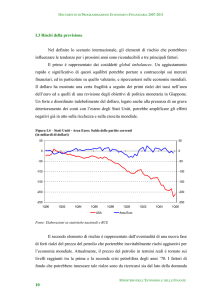
LS
LS
Raddrizzatore
Inverter
Filtro
DC
Sistema
AC
Filtro AC
Linea
DC
Filtro
DC
Sistema
AC
Filtro AC
Funzionam. da
raddrizzatore
Vd
-Vi
Vo cos 1
Vo cos 2
Vo cos 3
Funzionam.
da invertitore
u
u
Vo cos 4
-Vo cos 2
-Vo cos 1
crescenti
I
d
crescenti
Rr
Vor cos
Rl+sL l
2
sLs
I dr
Vdr
Rl+sL l
2
1
sLs
I di
Vdi
sC l
Ri
Voi cos i
Circuito elettrico equivalente di un collegamento HVDC con inverter funzionante ad costante
Rr
Vor cos
Rl+sL l
2
sLs
Vdr
I dr
Rl+sL l
2
1
sC l
sLs
I di
Vdi
-R i
Voi cos
Circuito elettrico equivalente di un collegamento HVDC con inverter funzionante a costante
Vd
Vo cos min
-Vi
mincostante
funzionamento ad costante e pari al valore minimo min,
funzionamento a costante e pari al valore minimo min,
funzionamento a corrente costante Id, agendo sull’angolo .
d costante
I
d
mincostante
-Vo cos min
funzionamento a tensione costante,
funzionamento ad angolo di accensione a massimo,
funzionamento in controllo di corrente con limite dipendente dalla
tensione sul collegamento (VDCOL Voltage Dependent Current
Order Limiter) ecc
Vd
Punto di lavoro
mincostante
mincostante
d -I) costante
d costante
I
d
Raddrizzatore
Inverter
Modello alle variazioni supponendo costante la forza elettromotrice lato inverter sia ad
costante che costante
A
R1
sL1
I d
Vor cos
sL2
R2
1
sC
B
Y s
1
R1 R 2
1
2 z
1
s 2 s2
nz
nz
1 sT 1
Con parametri
tipici e L1=L2
2 p
1
s 2 s2
np
np
1
nz
CL 2
z 1 R 2 C
2
L2
2 p L1 L 2 CR1R 2
T
R
R
R1 R 2
np
1
2
2 p
CR 1 L 2 R 2 L1
1
T 2
R1 R 2
np
np
T
CL1 L 2
2 R R
1
2
np
1
nz
CL
1 R C
z 2 2 L segno dipendente da R2: positivo a costante
T 2 L
segno dipendente da R1+R2
R1 R 2
2
nz
np
1
C
R 1 R 2 segno dipendente da R1+R2
p
4 2 L
I ref
1
In
C(s)
cos
180
-sin o
Vor
Vcos
or
Y(s)
I
Normalizzando e supponendo Vor costante
ys
1
r1 r2
1
2 z
1
s 2 s2
nz
nz
1 sT 1
i ref
2 p
1
s 2 s2
np
np
C(s)
y o y1 s
y sin oo
180 o
yo
1
r1 r2
segno dipendente da R1+R2
y1(s)
i
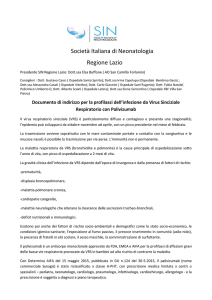
La funzione di trasferimento y1(s) presenta due zeri complessi coniugati z1 e z2, due poli complessi coniugati
p1 e p2 ed un polo reale p3 in -1/T. Nel funzionamento dell’inverter a costante solitamente R2<0 in quanto la
resistenza equivalente della commutazione dell’inverter Ri ha valore maggiore della Rl/2 di metà del
collegamento. Pertanto i due zeri sono a parte reale positiva risultando z<0. Il segno di p invece dipende
dalla somma R1+R2 che diviene negativa al diminuire della potenza di corto circuito della rete AC lato
inverter ovvero quando Ri>Rr+Rl. Il polo reale in -1/T cambia anch’esso segno diventando positivo quando
R1+R2 diviene negativo, così come il valore statico yo di y(s).
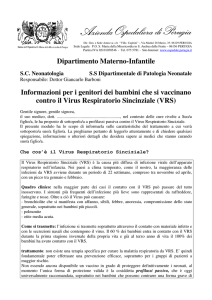
Inverter a costante
Poli e zeri funzione y(s)
Poli e zeri sistema con controllo I
Im
Ki
K
1
i
Cs K p
Kp 1
K p 1
s
sTi
sK p
p
Im
p
1
Im
p
1
1
z1
z1
zc
p
p
3
z1
zc
c
p
p
c
3
Re
Re
z2
z2
p
3
Re
p
p
2
2
p
1
Im
Im
p
1
z2
z1
p
2
Il sistema in ciclo aperto senza
controllo di corrente è stabile solo
se R1+R2>0 ovvero Pcc lato
inv>Pccmin
zc
p
zc
p
3
c
p
2
z1
p
p
c
3
Re
Re
z2
z2
p
2
Inverter a costante
poli e zeri a p.r. negativa
luogo delle radici nel semipiano a
p.r. neg.
stabilità incondizionata
Inverter a costante
stabilità condizionata da Pcc
sulla rete lato inverter
Root Locus
200
150
150
100
100
50
50
Imaginary Axis
Imaginary Axis
Root Locus
200
0
0
-50
-50
-100
-100
-150
-150
-200
-250
-200
-150
-100
-50
0
50
-200
-250
-200
-150
-100
-50
0
Sistema GRITA
Linea CC 400kV
Equivalente rete
greca 400kV
Stazione
400kV
Stazione
400kV
Filtri DC
Filtri AC
2x90+9Mvar
Filtri AC
2x90+9Mvar
Compensatore
sincrono