Università degli Studi di Modena e Reggio Emilia
Facoltà di Scienze della Comunicazione e dell’Economia
Corso di Laurea Specialistica in Economia e Gestione delle Reti e dell’Innovazione
Anno Accademico 2005/06 (sessione straordinaria)
La motivazione come determinante del
comportamento di organismi artificiali:
una simulazione di Artificial Life
Relatore: Chia.mo Prof. Roberto Serra
Correlatore: Chia.mo Prof. Domenico Parisi
Candidato: Fabio Ruini (matr. 7496)
Il dualismo mente-corpo e gli
attuali limiti della psicologia
cognitivista
La psicologia sperimentale (laboratorio e metodo galileiano) nelle sue
varie correnti: strutturalismo, comportamentismo, cognitivismo.
Per la scienza resta un problema aperto: l’esistenza di due apparati
concettuali distinti, un vocabolario per il realtà fisica ed uno per la “mente”.
La riunificazione della mente con il resto della realtà:
la metodologia della simulazione (per rendere precise e disambigue le
teorie della psicologia, “capire la realtà simulandola”);
la nascita del connessionismo (per superare i limiti dell’intelligenza
artificiale, “mano armata” della psicologia cognitivista).
Oltre l’approccio connessionista:
l’Embodied Cognitive Science
Nella prospettiva connessionista, il comportamento
(individuale) è un fenomeno complesso, emergente
dalla moltitudine di interazioni che hanno luogo ad un
livello più basso e su una scala temporale più ristretta.
D’accordo. Ma l’ambiente?
Embodied Cognitive Science:
Embodiment
Situatedness
Lo spazio per un ulteriore passo
in avanti
Fino ad oggi, la quasi totalità degli studi condotti nel
campo della Embodied Cognitive Science ha riguardato
la creazione di organismi artificiali (simulati a computer
o implementati fisicamente mediante artefatti robotici)
impegnati ad assolvere a singoli compiti, molto specifici.
Magari implementabili attraverso sequenze di azioni più
o meno articolate e gerarchicamente organizzate, ma
comunque finalizzate al perseguimento di un singolo
obiettivo.
Una delle caratteristiche più interessanti del
comportamento umano, però, è la sua flessibilità, intesa
come capacità di mutare e di adattarsi alle diverse
circostanze.
La motivazione
“La motivazione (dall’etimo latino motus) è una
spinta per svolgere una certa attività e si può
definire come un processo di attivazione
dell’organismo finalizzato alla realizzazione di
un dato scopo in relazione alle condizioni
ambientali. Da tale processo dipende l’avvio, la
direzione, l’intensità e la cessazione di una
condotta da parte del soggetto.”
Anolli L., Legrenzi P., Psicologia Generale
(ed. Il Mulino, Bologna, 2006 - pag. 201)
Duplice relazione con l’ambiente
“[…] realizzazione di un dato scopo in relazione alle
condizioni ambientali […] ”
L’ambiente determina gli scopi e dunque il comportamento
di un individuo. Al tempo stesso, l’ambiente è il
palcoscenico sul quale tale comportamento si manifesta e
dal quale l’individuo trae successivamente un feedback.
Ne deriva che lo studio della motivazione non può essere
affrontato mediante l’approccio connessionista tradizionale.
Occorre introdurre tra i vari parametri presi in
considerazione anche l’ambiente di riferimento.
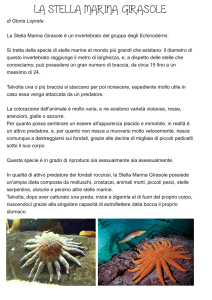
The Predator: l’ambiente
Mondo discreto non-toroidale, formato da
15x15 celle
Ogni cella ha probabilità 0.15 di contenere
al suo interno un’unità di cibo
Un organismo, che si muove all’interno
dell’ambiente alla ricerca del cibo
Un predatore (hard-wired), presente
mediamente per il 25% della vita
dell’organismo, che cerca di catturare
quest’ultimo
Raccolta e cattura hanno luogo
rispettivamente quando, in seguito ad un
movimento, organismo e cibo, oppure
organismo e predatore, si trovano nella
medesima cella
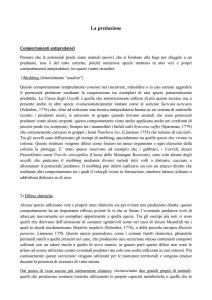
The Predator: l’architettura
neurale degli organismi
Due unità neurali di input, di tipo
continuo, deputate a gestire
l’informazione sensoriale relativa al
cibo (angolo e distanza). Altre due,
del tutto analoghe, dedicate alla
percezione del predatore.
Nove neuroni di tipo continuo nello
strato intermedio.
Due neuroni booleani di output, che
implementano la risposta motoria
dell’organismo:
00 : rimane fermo;
01 : ruota di 90° in senso orario;
10 : ruota di 90° in senso antiorario;
11 : si sposta in avanti di una casella
nella direzione in cui è orientato.
The Predator: dettagli tecnici
Popolazione iniziale composta da 100 individui
Evoluzione genetica per 1000 generazioni
Ad ogni generazione, gli individui sono “testati”
individualmente per 25 epoche (di 100 passi ciascuna)
all’interno di altrettanti ambienti differenti (per una vita
complessiva di 2500 step)
Formula di fitness: quantità di cibo raccolta - (numero di
catture subite x “capture damage”)
I 20 migliori individui di ogni generazione si riproducono in
maniera asessuata, dando origine ciascuno a 5 individui
“figli”, che ereditano il materiale genetico del genitore, non
necessariamente identico (ciascun peso sinaptico ha
probabilità 0.25 di subire una mutazione casuale di un
valore compreso tra -1 e +1)
Fitness media e massima
(capture damage = 5)
Ammontare medio di cibo raccolto
(capture damage = 5)
Numero medio di catture subite
(capture damage = 5)
Ammontare medio di cibo raccolto
in presenza ed in assenza del
predatore (capture damage = 5)
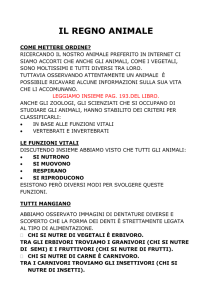
L’emergere di un meccanismo di
attenzione selettiva: analisi
dell’hidden layer
Davvero gli organismi riescono a
discriminare tra gli input sensoriali?
Per scoprirlo sono stati messi a
confronto i pattern di attivazione dello
strato intermedio della rete neurale
relativa ai migliori organismi dell’ultima
generazione:
in presenza esclusiva del predatore
in presenza di predatore e cibo
Dist from pred
Dist from food
PD
4
9
x
Food and predator
i, j
x
Only predator
j
i 1 j 1
4
APD
Dist from pred
Dist from food 1
PD
Dist from pred
2*Dist from food
4
Predator distance /
Food distance
P1/F2
P1/F4
P1/F6
P1/F8
P2/F2
P2/F4
P2/F6
P2/F8
P3/F2
P3/F4
P3/F6
P3/F8
P4/F2
P4/F4
P4/F6
P4/F8
P5/F2
P5/F4
P5/F6
P5/F8
P6/F2
P6/F4
P6/F6
P6/F8
P7/F2
P7/F4
P7/F6
P7/F8
P8/F2
P8/F4
P8/F6
P8/F8
PD
6.4063
6.5595
6.7030
6.8311
7.0756
7.2237
7.3610
7.4824
7.9049
8.0425
8.1643
8.2652
8.7859
8.9057
9.0002
9.0629
9.5610
9.6505
9.7009
9.7024
10.0892
10.1283
10.1103
10.0219
10.2913
10.2511
10.1338
9.9259
10.1430
9.9895
9.7440
9.4017
APD
6.624975
7.285675
8.094225
8.938675
9.6537
10.087425
10.150525
9.81955
Variazioni del valore del
parametro capture damage
Modificando il valore del parametro capture
damage, ovvero l’importanza relativa di una
cattura da parte del predatore al confronto
con la raccolta di un’unità di cibo, varia lo
schema comportamentale degli organismi.
Fitness media e massima
(capture damage = 5, 10 e 50)
Ammontare medio di cibo raccolto
(capture damage = 5, 10 e 50)
Numero medio di catture subite
(capture damage = 5, 10 e 50)
Percentuale di passi spesi senza
muoversi (capture damage = 5, 10 e 50)
I due livelli del comportamento
Livello strategico: il “cosa fare”, deputato a
circuiti neurali relativamente semplici ed
avente uno stretto legame con la
motivazione;
Livello tattico: il “come farlo”, data l’enormità
degli stimoli presenti nell’ambiente, necessita
del supporto di strutture particolarmente
sofisticate.
L’aggiunta di un circuito
“sotto-corticale” per la gestione del
“livello strategico” del comportamento
Modifica
dell’architettura di rete
con l’introduzione di
due neuroni intermedi
aggiuntivi, che
ricevono l’attivazione
dall’input sensoriale
relativo al predatore
(la componente
“emotivomotivazionale”)
Fitness media e massima
(con e senza circuito aggiuntivo)
Ammontare medio di cibo raccolto
(con e senza circuito aggiuntivo)
Numero medio di catture subite
(con e senza circuito aggiuntivo)
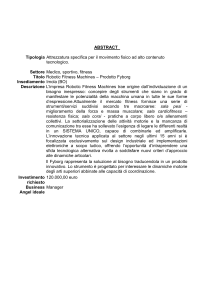
L’effetto del “rumore”
sull’evoluzione genetica
Condizione un po’ “particolare” è quella con capture damage = 0.
In questo caso, il predatore non provoca alcun danno all’organismo in
caso di cattura, limitandosi pertanto ad agire come un semplice
“fattore di disturbo”. “Rumore”, appunto.
Confronto:
con un organismo dotato di un’architettura neurale più semplice,
che non prende in considerazione il predatore;
con un organismo dotato della “solita” architettura di rete, ma che
riceve come input dei neuroni deputati a gestire l’informazione
sensoriale relativa al predatore, del semplice rumore gaussiano.
Fitness massima (predatore “innocuo” vs.
predatore assente)
Fitness media (predatore “innocuo”
vs. predatore assente)
Distribuzione della fitness
(predatore “innocuo”)
Distribuzione della fitness
(predatore assente)
Fitness massima (rumore gaussiano vs.
predatore “innocuo”)
Fitness media (rumore gaussiano vs.
predatore “innocuo”)
Conclusioni (I)
Un meccanismo attentivo compare negli organismi della nostra
simulazione come fenomeno emergente, con modalità che variano
a seconda dell’ambiente (inteso come determinante della “struttura
motivazionale” dell’individuo).
Un’architettura neurale dotata di un circuito
“motivazionale/emozionale” risulta essere più performante rispetto
ad una che ne è priva. Conferma alle tesi di vari neuroscienziati
(ad es. Ledoux, con il suo “Emotional Brain”), secondo i quali nel
sistema nervoso umano esistono strutture sotto-corticali che
agiscono “in appoggio” al più complesso sistema corticale.
Strutture presumibilmente dedicate alla gestione del “livello
strategico” del comportamento.
Conclusioni (II): un aspetto
metodologico
L’introduzione del rumore gioca un ruolo rilevante non soltanto
nell’apprendimento in vita (come già era noto, in virtù dei numerosi
studi effettuati con riferimento ai metodi di addestramento delle reti
neurali), ma anche nell’evoluzione biologica.
La presenza di un certo quantitativo di rumore, se da un lato
peggiora le performance dei migliori individui della popolazione,
dall’altro migliora le prestazioni medie. L’effetto è evidente in
riferimento alle “code di sinistra” delle distribuzioni della fitness
delle popolazioni.
Questo aspetto merita di essere approfondito ulteriormente in
futuro, con studi specifici volti ad indagare il perché del
manifestarsi di un tale effetto.