Parte I (I Sensori)
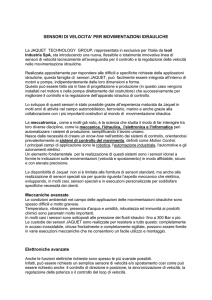
I sensori induttivi di prossimità
•I sensori a correnti parassite, sfruttano il
fenomeno dell’induzione di correnti
parassite su un opportuno target, per
sbilanciare un ponte.
•L’intervallo di funzionamento va da
0.25 a 30 mm (sensori di prossimità)
Parte I (I Sensori)
I sensori induttivi di prossimità
•Intervallo di misura: 0.25, 30 mm;
•Non linearità migliore di 0.5%;
•Frequenza di eccitazione 1MHz;
•Risoluzione 0.0001 mm.
2
Parte I (I Sensori)
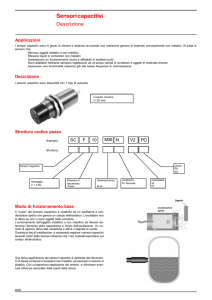
I sensori capacitivi
E’ possibile, in teoria, variare una capacità, in
funzione di uno spostamento cambiando uno dei
parametri che forniscono il valore di una capacità:
A
C o r
x
Le soluzioni che si basano sul cambiamento del
dielettrico vengono raramente utilizzate per difficoltà
costruttive.
Si ricorre al cambiamento della distanza per valori
molto grandi e molto piccoli del misurando.
3
I dispositivi che si basano sulla variazione dell’area
sono adatti per applicazioni intermedie (1÷ 10 cm).
Parte I (I Sensori)
I sensori capacitivi
Nonostante alcuni problemi di tipo elettrico, i
sensori capacitivi hanno delle caratteristiche
metrologiche che li rendono apprezzabili (basso
carico meccanico, semplicità costruttiva, elevata
stabilità).
La forma più comune di sensore capacitivo è a
facce piane parallele. Per esso si ha:
A
C o r
x
Oppure, se si usa un capacitore con n piatti:
A
C o r n 1
x
e quindi, rispettivamente:
dC
A dC
A
o r 2 ;
o r 2 n 1
dx
x
dx
x
Valori tipici di C vanno da 1 pF a 500 pF, con
una frequenza maggiore di 10 kHz, per ridurre il
valore dell’impedenza d’uscita del sensore.
Parte I (I Sensori)
I sensori capacitivi
I sensori capacitivi:
•Hanno una vita media molto maggiore
rispetto ai potenziometri in quanto non
sono soggetti ad usura per strofinio;
•Hanno un campo di misura circa doppio
rispetto a quello dei sensori induttivi;
•Producono verso l’esterno un campo
elettromagnetico molto minore.
•Esistono delle configurazioni differenziali
che eliminano il problema della non
linearità.
5
Parte I (I sensori)
I sensori capacitivi
Infatti si ha:
A
A
C1
; C2
dz
dz
Vr
1
C2
V1
Vr
1
1
jC1
C1 C2
jC1 jC2
V2
Vr
1
1
jC1 jC2
1
C1
Vr
j C 2
C1 C2
1 / d z
V1 Vr
Vr
1 / d z 1 / d z
1 / d z
V2 Vr
Vr
1 / d z 1 / d z
dz
2d
dz
2d
z
d z d z
V1 V2 Vr
Vr
2d
d
2d
6
Parte I (I Sensori)
I sensori capacitivi
•I sensori capacitivi coprivano nel 1999
il 3.1% del mercato US.
•Applicazioni
tipiche
capacitivi sono:
dei
sensori
•Sensori di prossimità (comprese le
applicazioni
di
riconoscimento
presenza umana e veicoli);
•Misure di altre grandezze (flusso,
livello, etc.)
•Realizzazione di interruttori.
NB: un buon testo sui sensori capacitivi è
Capacitive Sensors, Larry K. Baxter, IEEE
Press.
7
Parte I (I Sensori)
I sensori piezoelettrici
•I sensori piezoelettrici si basano sulla
proprietà
di
alcuni
materiali
di
accumulare cariche alla superficie per
effetto di carichi meccanici e viceversa
(a differenza dei sensori capacitivi sono
dei dispositivi attivi).
•I sensori piezoelettrici godono di:
•Elevata rigidità
•Elevata frequenza naturale (fino a
500 kHz)
•Grande dinamica (migliore di 108)
•Stabilità, riproducibilità e linearità
•Ampio campo di temperatura
•Elevata
insensibilità
elettromagnetici esterni.
ai
campi
Parte I (I Sensori)
I sensori piezoelettrici
I sensori piezoelettrici non possono
misurare fenomeni statici per
lunghi intervalli di tempo a causa
della resistenza di dispersione e
delle correnti di perdita verso i
9
componenti elettronici attivi.
Parte I (I Sensori)
I sensori piezoelettrici
•La piezoelettricità è legata a delle
asimmetrie della struttura cristallografica
dei materiali.
•I materiali che presentano l’effetto
piezoelettrico sono dei dielettrici e
possono essere: cristalli naturali (quarzo
e tomalina), ceramiche ferroelettriche (è
richiesto un processo di polarizzazione) e
10
film polimerici.
Parte I (I Sensori)
I sensori piezoelettrici
I
fenomeni
piezoelettrici
vennero
scoperti nel 1880-1881 da Jacques e
Pierre Curie. Essi vengono descritti
mediante le equazioni piezoelettriche.
Si consideri il caso schematico di un
parallelepipedo di materiale dielettrico.
Se il materiale non è piezoelettrico,
applicando una forza esterna si ha:
11
Parte I (I Sensori)
I sensori piezoelettrici
F
l
T Y
YS
A
l
1
S sT ;
s
Y
Applicando contemporaneamente una
differenza di potenziale V tra i due
elettrodi, si ha:
D E 0 E P
D
vettore spostamento elettrico
P vettore di polarizzaz ione
12
Parte I (I Sensori)
I sensori piezoelettrici
Se il materiale è piezoelettrico occorre
introdurre anche gli effetti mutui:
D dT T E
S s ET dE
T costante dielettric a a stress costante
s T cedevolezz a a campo elettrico costante
d (C/N) è detta costante piezoelett rica
13
Parte I (I Sensori)
I sensori piezoelettrici
E
D
T
dT
T
D
T
gT
S
d
S
T E E E E eE
s
s
s
g
d
T
coeff. piezoelett rico di tensione
d
e E coeff. piezoelett rico di deformazio ne
s
Viene introdotto anche un coefficiente
di accoppiamento elettromeccanico:
k g e
d
2
s
T
E
14
Parte I (I Sensori)
I sensori piezoelettrici
ESEMPIO 1:
Per il titanato di piombo si ha:
d=-44pC/N;
T=600o;
g=-8(mV/m)/(N/m2);
Si vuole calcolare la tensione sviluppata
(a circuito aperto) da un carico di 1000
N su un papallelepipedo di 1 cm di lato.
15
Parte I (I Sensori)
I sensori piezoelettrici
SOLUZIONE:
Essendo in condizioni di circuito aperto si
ha:
D0
E
dT
T
44 10 1000 /(. 01)
12
2
600 8.85 1012
82.9 kV/m
V E h 82.8 1000 / 100 828 V
16
Parte I (I Sensori)
I sensori piezoelettrici
ESEMPIO 2:
iSi vuole calcolare la deformazione
prodotta sullo stesso dispositivo quando
si applica una differenza di potenziale
pari a V=1kV, in assenza di carico
meccanico.
SOLUZIONE
T 0
44 10 1000
S dE
4.4 10
12
6
0.01
4.4με
6
8
h 4.4 10 0.01 4.4 10
44nm
17
Parte I (I Sensori)
I sensori piezoelettrici
In realtà nel caso di un dispositivo reale
le azioni meccaniche possono avvenire
secondo sei diversi assi (tre per tensionecompressione e tre per sollecitazioni di
torsione).
E’ necessario quindi ricorrere a una
rappresentazione matriciale.
18
Parte I (I Sensori)
I sensori piezoelettrici
Nel caso di assenza di fenomeno
piezoelettrico le relazioni diventano:
Si sij T j
Di ij E j
i 1, 2, 3
j 1,..,6
i, j 1, 2, 3
E in presenza di effetto piezoelettrico si
ha:
Si sij T j sik Ek
Di im Em d in Tn
j , n 1, ...,6
i, k , m 1, 2, 3
d ij d ji
im 0 per i m
19
Parte I (I Sensori)
I sensori piezoelettrici
Per un tipico dispositivo
riportati i seguenti parametri
vengono
Tale materiale genera ad esempio in
reazione a uno stress torsionale di 1N/m2
applicato attorno all’asse 2 (direzione
5), una densità di carica pari a 515
pC/m2 su due elettrodi collegati al
materiale in corrispondenza della
20
direzione 1.
Parte I (I Sensori)
I sensori piezoelettrici
Per i materiali più comuni valgono i
valori riportati in tabella per le
caratteristiche piezoelettriche.
21
Parte I (I Sensori)
I sensori piezoelettrici
•Anche i sensori piezoelettrici vengono
utilizzati per realizzare sensori di sistemi di
deformazioni in tre direzioni (rosette
piezoelettriche).
NB: Informazioni sui sensori piezoelettrici
si possono trovare in G. Gautschi,
Piezoelectric Sensorics, Springer Edt.
Parte I (I Sensori)
I sensori piezoelettrici
•La connessione con un dispositivo di
misura dei sensori piezoelettrici crea
problemi, a causa della loro elevata
impedenza d’uscita.
23
Parte I (I Sensori)
I sensori optoelettrici
Esistono vari sensori optoelettrici, tutti
hanno in comune la proprietà di influire
in modo trascurabile sul misurando.
Esempi di tali dispositivi sono:
•il sensore Fotonic.
• I vettori e/o le matrici di fotodiodi.
Parte I (I Sensori)
I sensori optoelettrici
Il sensore Fotonic
Utilizza fibre ottiche per inviare un fascio
luminoso al target. Il segnale riflesso
viene catturato da fibre ottiche
riceventi.
25
Parte I (I Sensori)
I sensori optoelettrici
Si ottiene in tal
modo un sensore
di prossimità ad
elevata sensibilità.
26
Parte I (I Sensori)
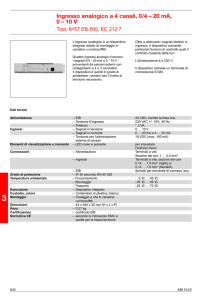
I sensori a ultasuoni
I sensori ad ultasuoni usano la misura del
tempo di volo (TOF) di un’onda di
pressione ad ultrasuoni per la misura della
distanza.
Reflected
beam
z
S
O
Transmitted
beam
A
S
h
A
Receiver
Target
y
2h
TOF
vs
27
Parte I (I Sensori)
I sensori a ultasuoni
Il ricevitore e il trasmettitore vengono
realizzati con:
ceramiche piezoelettriche
polimeri
Operanti a una temperatura inferiore alla
temperatura di Curie.
Lo stesso dispositivo può funzionare da
trasmettitore e ricevitore del segnale di
eco.
Si utilizzano generalmente dispositivi
risonanti a frequenza tipica di 40kHz.
28
Parte I (I Sensori)
I sensori a ultasuoni
Tali sensori sono carattetizzati da un
basso costo (qualche euro).
Principali cause d’incertezza sono
la risoluzione (limitata a qualche dalla
lunghezza d’onda del segnale ad
ultrasuoni).
la dipendenza della velocità del suono
in aria dalla temperatura.
29
Parte I (I Sensori)
Gli encoder
Gli encoder hanno il vantaggio di fornire
un’uscita direttamente sotto forma
digitale. Esisono encoder per
•Misure angolari
•Misure di spostamento rettilineo
Parte I (I Sensori)
Gli encoder
Tutti gli encoder sono caratterizzati da
strutture geometriche regolari che
permettono di determinare la posizione
dell’organo cui è vincolato il sensore.
Esistono sistemi:
• Ottici
•Elettromagnetici
31
Parte I (I Sensori)
Gli encoder
Gli encoder hanno il vantaggio di fornire
un’uscita direttamente sotto forma
digitale. Esisono tre tipi di encoder:
•Encoder tachimetrico
•Encoder incrementale
•Encoder assoluto.
32