(y A ) - itet g. maggiolini – area cat")
COMPENSAZIONE DELLE
POLIGONAZIONI
POLIGONALI CHIUSE
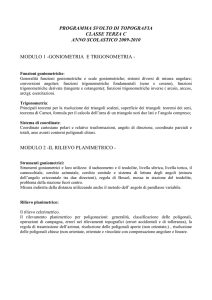
LE POLIGONALI CHIUSE
Le poligonali chiuse sono le più usate nei rilievi di piccola entità. Esse sono
intrinsecamente compensabili e possono essere:
1. Orientate;
2. Locali (o non orientate).
3
SCHEMA DELLE POLIGONALI CHIUSE ORIENTATE
Nelle poligonali chiuse vengono misurati tutti gli angoli interni e tutti i lati. In questo
modo sono presenti 2 elementi sovrabbondanti, un angolo e un lato, che permettono il
controllo e la compensazione sia delle misure angolari sia delle misure lineari. Il vertice
A, poi, viene considerato sia come primo che come ultimo vertice.
Y
y N
E
DE
D
DATI
A
X’A
(AB)
B
C
FASI DI SVILUPPO DELLE
POLIGONALI CHIUSE
X
AB, BC, CD
, , , …
XB; YB
XC; YC
INCOGNITE
XD; YD
XE; YE
MISURE
Y’A
O
X’A; Y’A
(AB)
1.
2.
3.
4.
Controllo e compensazione angolare.
Calcolo delle coordinate parziali.
Controllo e compensazione lineare.
Calcolo delle coordinate totali.
4
CONTROLLO ANGOLARE
Nella misura degli angoli interni vengono commessi errori, pertanto la loro somma
differisce da quella teorica, in più o in meno, di una certa quantità ± che prende il
nome di errore di chiusura angolare della poligonale. Nel nostro caso:
± = [ + + + + ] [(5 2) × 200c]
Y
y N
A
X’A
E
DE
D
| ± | ≤ T
(AB)
C
Y’A
O
È necessario che il valore assoluto
dell’errore di chiusura angolare
non superi un certo valore limite T
chiamato tolleranza angolare.
X
B
Nelle poligonali catastali con
sviluppo inferiore ai 2 km, la
tolleranza angolare viene
calcolata con la formula:
T = 0C,025 √ N
5
COMPENSAZIONE ANGOLARE
Dato che tutti gli angoli vengono misurati con le stesse modalità operative, è logico supporre
che essi siano affetti dallo stesso errore, per cui la compensazione angolare consiste nel
distribuire l’errore di chiusura angolare (cambiato di segno) in parti uguali su tutti gli angoli
misurati.
yN
E
Y
y N
DE
(EA)
X’A A
(DE)
D
CORREZIONE ANGOLI
yN
(AB)
yN
Y’A
O
= –
N
X
(BC)
B
C
(CD)
’ =
’ =
’ =
’ =
’ =
CALCOLO DEGLI AZIMUT
(AB) = noto
(BC) = (AB) + ’ 200C
(CD) = (BC) + ’ 200C
(DE) = (CD) + ’ 200C
(EA) = (DE) + ’ 200C
6
CALCOLO DELLE COORDINATE PARZIALI
Con le lunghezze dei lati e l’ampiezza degli azimut, si possono calcolare le
coordinate parziali, considerando il vertice A, inizialmente come primo vertice,
poi come ultimo.
Ascisse parziali (x)
yN
yN
E
y
DE
A
(yC)B
(AB)
(xA)E
(yB)A
(xC)B = BC × sen (BC)
D
(EA)
(xB)A = AB × sen (AB)
(xD)C = CD × sen (CD)
(xE)D = DE × sen (DE)
(DE)
yN
(xA)E = EA × sen (EA)
Ordinate parziali (y)
(xB)A
(xC)B
(xE)D
yN
(BC)
(xD)C
(yB)A = AB × cos (AB)
(yC)B = BC × cos (BC)
C
(CD)
(yD)C = CD × cos (CD)
(yE)D = DE × cos (DE)
(yA)E = EA × cos (EA)
B
In una poligonale chiusa
dovrebbe essere:
(x) =0
(y) =0
7
CONTROLLO E TOLLERANZA LINEARE
Nella misura dei lati, vengono commessi errori che si trasmettono sulle
coordinate parziali. Dunque le sommatorie delle coordinate parziali non
risulteranno nulle, ma presenteranno invece dei valori (positivi o negativi), diversi
da 0:
Y
E
DE
D
A*
(x) = x ≠ 0
(y) = y ≠ 0
Errore di chiusura lineare
= x2 + y2
A
x
y
Esso deve essere inferiore alla
tolleranza lineare TL assegnata:
C
O
X
B
TL
Nelle poligonali catastali con sviluppo
inferiore ai 2 km, la tolleranza
lineare TL viene calcolata con la
formula assegnata (L=AB+BC+CD+…):
TL = 0,025 L
8
COMPENSAZIONE LINEARE
(empirica)
La compensazione lineare viene eseguita ridistribuendo (con segno
opposto) sulle coordinate parziali, sia il valore ±x sia quello ± y,
proporzionalmente alla lunghezza dei lati. Si calcolano gli errori unitari (per
metro di poligonale), distintamente per le ascisse e per le ordinate:
x
Kx = –
L
y
Ky = –
L
Correzione delle coordinate parziali
ascisse parziali
corrette
ordinate parziali
corrette
(xB)’A = (xB)A ± Kx AB
(yB)’A = (yB)A ± Ky AB
(xC)’B =(xC)B ± Kx BC
(yC)’B = (yC)B ± Ky BC
(xD)’C = (xD)C ± Kx CD
(yD)’C =(yD)C ± Ky CD
(xE)’D =(xE)D ± Kx DE
(yE)’D =(yE)D ± Ky DE
(xA)’E =(xA)E ± Kx EA
(yA)’E = (yA)E ± Ky EA
9
COORDINATE TOTALI COMPENSATE
Con le coordinate parziali compensate è possibile completare la
procedura con il calcolo delle coordinate totali rispetto al sistema di
riferimento principale.
Ascisse totali corrette
Ordinate totali corrette
X’A = elem. noto
XB = X’A + (xB)’A
XC = XB + (xC)’B
XD = XC + (xD)’C
XE = XD + (xE)’D
XA = XE + (xA)’E
Y’A = elem. noto
YB = Y’A + (yB)’A
YC = YB + (yC)’B
YD = YC + (yD)’C
YE = YD + (yE)’D
YA = YE + (yA)’E
10
POLIGONALI RIFERITE A SISTEMI LOCALI
Il calcolo della poligonale locale si sviluppa come una poligonale orientata, ma
con l’ordinata parziale del punto B (o l’ascissa parziale del punto A) che dovrà
essere nulla anche dopo la compensazione lineare [(yB)A = (yB)’A= 0 oppure (xA)F =
(xA)’F= 0]; ciò comporta un diverso modo di calcolare gli errori unitari Kx e Ky .
E
A
Asse X coincidente con AB
D
DE
x
Kx = –
L
B
y
Ky = –
L – AB
C
Asse Y coincidente con AE
x
Kx = –
L – AE
y
Ky = –
L
11
ESEMPIO NUMERICO
XA = 37,85 m; YA = 64,38 m ;
(AB) = 75C,390
Staz.
A
B
C
D
E
Punto
Lettura
C. O.
Distanze
(m)
E
80c,189
-
B
192c,209
67,35
A
110c,701
-
C
300c,171
62,81
B
200c,750
-
D
292c,120
107,63
C
30c,733
-
E
147c,373
118,15
D
201c,628
-
A
292c,078
110,25
12
Vertici
A
Angoli
misurati
Angoli
corretti
Lati
(m)
-67,35
B
189c,47
+0c,01
91c,37
+0c,01
D
116c,64
+0c,01
E
90c,45
+0c,01
A
112c,02
+0c,01
= 599c,95
x = x =
/5 = 0c,01
y’i
---
---
--
--
37,85 64,38
Xi
Yi
+62,380
+0,008
+25,392
0,031
+62,388
+25,361
+ 24,54 39,02
+53,487
+0,007
+32,927
0,029
+53,494
+32,898
+78,03
6,12
68,280
+0,013
+83,199
-0,049
68,267
+83,150
+9,76
+77,03
107,606
+0,014
48,789
0,053
107,592
48,842
97,83
+28,19
+59,964
+0,013
92,517
0,050
+59,977
92,567
37,85
64,38
0,055
+0,212
= y =y
Kx= 0,000118 +0,000455 =Ky
600c,00
= 0c,05
x’i
163c,390
112c,03
L= 466,19
yi
272c,900
90c,46
110,25
xi
356c,250
116c,65
118,15
Coordinate parziali
Coordinate totali
corrette
64c,870
91c,38
107,63
Coordinate parziali
75C,390
189c,48
62,81
C
Azimut
i–1+i200
<Ta = 0c,025 5=0c,056
= 0,2122 + 0,0552 = 0,22m
TL= 0,025 466,19 =0,54m >
13
POLIGONALI APERTE
LE POLIGONALI APERTE VINCOLATE
Le poligonali aperte vincolate sono perlopiù inserite tra due vertici trigonometrici
A e B noti; da ciascuno di questi, poi, è necessario vedere un ulteriore punto di
coordinate note rispetto al quale vengono misurati l’angolo di apertura e quello di
chiusura .
elementi noti
A(X’A;Y’A), B(X’B;Y’B)
P(X’P;Y’P), R(X’R;Y’R)
elementi misurati
incognite
, 1, 2,…n ,
A1(XA1;YA1); A2(XA2;YA2);
A3(XA3;YA3);
….An(XAn;YAn)
AA1, A1A2, A2A3,…AnB
15
IL CONTROLLO ANGOLARE
La necessità di vedere il punto noto P da A è legata all’apertura della poligonale
(definizione dell’azimut (AA1), con la misura di ).
Dopo aver ottenuto (AA1), si possono calcolare gli azimut di tutti i lati della poligonale.
yN
( A1 A2 ) ( AA1 ) 1 200C
X A' X P'
( PA) arctg '
YA YP'
*
P
X’P;Y’P
( AA1 ) ( PA) 200
(PA)
*
*
( A2 A3 ) ( A1 A2 ) 2 200C
( A3 A4 ) ( A2 A3 ) 3 200C
.......................................
C
( An B ) ( An 1 An ) n 200C
Y
yN
yN
1
(AA1)
A
2
(A2A3)
A2
X’A;Y’A
O
(A1A2)
yN
A1
yN
3
(A3A4)
yN
yN
A3
4
(A4An)
A4
n
(AnB)
B
X’B;Y’B
An
X
16
IL CONTROLLO ANGOLARE
La necessità di vedere il punto noto R da B è legata alla chiusura della poligonale
(controllo dell’azimut (BR), con la misura di ).
Dopo aver ottenuto (AnAB), si può calcolare l’azimut (BR), sia con le coordinate di B e R, sia
con l’angolo , permettendo il controllo angolare della poligonale.
P
*
X’R;Y’R
'
B
( BR ) ( An B ) 200C
Y
yN
yN
yN
1
(AA1)
A
yN
(A1A2)
A1
yN
2
(A2A3)
A2
X’A;Y’A
O
R
X X
( BR ) arctg
Y YB'
'
R
'
R
X
3
(BR)
(A3A4)
yN
yN
A3
4
(A4An)
A4
n
(AnB)
B
X’B;Y’B
An
Se non si fossero commessi errori nella misura degli angoli
, 1, 2…, l’azimut (BR) risulterebbe uguale a (BR)*.
17
LA COMPENSAZIONE ANGOLARE
L’azimut (BR)*, calcolato con le coordinate di B e R, è da ritenere corretto, sicché la
somma degli errori commessi nella misura degli angoli al vertice , 1, 2… (errore
di chiusura angolare) sarà fornito dalla seguente espressione:
± = (BR)
(BR)*
Questo errore dovrà essere inferiore
alla tolleranza angolare:
Nelle poligonali catastali con sviluppo inferiore ai 2
km, la tolleranza angolare viene calcolata con la:
| ± | ≤ T
T = 0C,025 N
Considerando tutti gli angoli misurati con le stesse modalità operative, la
compensazione angolare consiste nel distribuire l’errore di chiusura angolare
(cambiato di segno) in parti uguali su tutti gli angoli misurati:
= –
N
(AA1)’ = (AA1) ±
(A1A2)’ = (A1A2) ± 2
(A2A3)’ = (A2A3) ± 3
(A3A4)’ = (A3A4) ± 4
...................................
(BR)’ = (BR) ± N
18
CONTROLLO LINEARE: verifica di XB,YB
Con gli azimut compensati si procede al calcolo delle coordinate parziali:
Ascisse parziali (x)
Ordinate parziali (y)
Le coordinate di B, passando
attraverso tutti i lati della
poligonale, saranno:
(xA1)A = AA1 sen (AA1)’
(yA1)A1 = AA1 cos (AA1)’
(xA2)A1= A1A2 sen (A1A2)’
(yA2)A1 = A1A2 cos (A1A2)’
(xA3)A2 = A2A3 sen (A2A3)’
(yA3)A2 = A2A3 cos (A2A3)’
(xA4)A3= A3A4 sen (A3A4)’
(yA4)A3 = A3A4 cos (A3A4)’
XB = X’A + x
………………………….
…………………………..
(xB)An = AnB sen (AnB)’
(yB)An = AnB cos (AnB)’
YB = Y’A + y
XB;YB
Y
x
A1
A
A3
A2
X’A;Y’A
O
B*
A4
An
y
B
X’B;Y’B
X
19
LA COMPENSAZIONE LINEARE
La misura dei lati avviene con errori che si trasmettono su tutte coordinate
parziali, e infine anche sulle coordinate del punto B che, pertanto, saranno
diverse da quelle assegnate X’B, Y’B:
x = XB–X’B ≠ 0
y = YB–Y’B ≠ 0
Errore di chiusura lineare
= √x2 + y2
Nelle poligonali catastali con sviluppo inferiore ai 2 km, la
tolleranza lineare TL viene calcolata con la formula
assegnata (L=AB+BC+CD+…):
TL = 0,025 L
La compensazione lineare viene eseguita ridistribuendo (con segno opposto)
sia il valore ±x che quello ± y, proporzionalmente alla lunghezza dei lati. Si
calcolano, prima di tutto, gli errori unitari (per metro di poligonale), distintamente
per le ascisse e per le ordinate:
x
Kx = –
L
y
Ky = –
L
20
LA COMPENSAZIONE LINEARE
Con gli errori unitari si correggono le coordinate parziali:
Ascisse parziali corrette (x’)
Ordinate parziali corrette (y’)
(xA1)’A = (xA1)A ± Kx AA1
(yA1)’A1 = (yA1)A1 ± Ky AA1
(xA2)’A1= (xA2)A1 ± Kx A1A2
(yA2)’A1 = (yA2)A1 ± Ky A1A2
(xA3)’A2 = (xA3)A2 ± Kx A2A3
(yA3)’A2 = (yA3)A2 ± Ky A2A3
(xA4)’A3= (xA4)A3 ± Kx A3A4
(yA4)’A3 = (yA4)A3 ± Ky A3A4
………………………….
…………………………..
(xB)’An = (xB)An ± Kx AnB
(yB)’An = (yB)An ± Ky AnB
Infine si calcolano le coordinate totali:
Ascisse totali
Ordinate totali
X’A = elemento noto
Y’A = elemento noto
XA1 = X’A + (xA1)’A
YA1 = Y’A + (yA1)’A1
XA2 = XA1 + (xA2)’A1
YA2 = YA1 + (yA2)’A1
XA3 = XA2 + (xA3)’A2
YA3 = YA2 + (yA3)’A2
XA4 = XA3 + (xA4)’A3
YA4 = YA3 + (yA4)’A3
………………..….
…………………..
XB = XAn + (xB)’An
YB = YAn + (yB)’An
21
APERTURA A TERRA
DELLE POLIGONALI
APERTURA A TERRA DELLE POLIGONALI
I punti trigonometrici A e P (come B e R) sono spesso inaccessibili, dunque non
è possibile farvi stazione per misurare direttamente l’angolo (o ). Non solo, ma
anche la misura diretta della lunghezza del primo lato AA1 risulta impedita.
Per misurare e la lunghezza del lato AA1 esiste una procedura topografica, nota
come apertura a terra. Essa prevede la scelta di un punto ausiliario M in
posizione tale che da esso siano visibili A, A1 e il trigonometrico P.
23
1. APERTURA A TERRA: P visibile da A1
Si misura direttamente il lato b=MA1 e gli angoli =AMA1 e =MA1A.
Con il teorema dei seni si calcola la lunghezza del lato AA1 (primo della
poligonale).
Con stazione in A1 si misura l'angolo =PA1A.
P X’P;Y’P
Il triangolo APA1 diviene risolvibile (noti AP, AA1 e
), dunque si calcola l’angolo APA1 quindi, per
differenza, l’angolo = PAA1, cioè l’angolo di
apertura.
APA1 arcsen (
yN
(AA1)
A
X’A;Y’A
AA1
b
b sen
sen ( )
A1
AA1
sen ) α 200c ( APA1 )
AP
A2
M
24
2. APERTURA A TERRA: P non visibile da A1
Si misura direttamente il lato b=MA1 e gli angoli =AMA1 e =MA1A.
Con il teorema dei seni si calcola la lunghezza del lato AA1 e AM.
Con stazione in M si misura l’angolo =PMA.
P X’P;Y’P
Il triangolo APM diviene risolvibile (noti AP, AM e
). Si calcola, dunque, l’angolo APM, quindi, per
differenza, l’angolo =PAM, cioè l’angolo di
apertura.
AM
APM arcsen (
sen ); PAM 200c ( APM )
AP
A1
yN
(AA1)
A
X’A;Y’A
PAM [200c ( )]
b
M
AA1
b sen τ
sen ( τ λ)
AM
b sen
sen ( )
A2
25
POLIGONALI
COMPENSABILI
PARZIALMENTE
POLIGONALI PARTICOLARI
Se dai vertici A e B non sono visibili altri punti di coordinate note (P e R) allora
non sarà possibile eseguire il controllo e la compensazione angolare. Sono
invece possibili il controllo e la compensazione laterale.
C’è poi anche un altro problema; non potendo misurare l’angolo , non è
nemmeno possibile l’apertura della poligonale che, dunque, rimane priva
dell’orientamento iniziale, cioè dell’azimut del primo lato (AA1).
Y
B
yN
X’B;Y’B
A
(AA1) incognito
An
A3
X’A;Y’A
O
X
A1
A2
27
POLIGONALI PARTICOLARI
Per “aprire” la poligonale si fissa arbitrariamente l’azimut del primo lato assegnandogli un
valore fittizio (AA1)* [es. 100C]. Possiamo ora procedere al calcolo delle coordinate dei vertici
della poligonale fittizia A, A*1, A*2, A*3...B*, che risulteranno tutti rigidamente ruotati di una
certa quantità rispetto al sistema di riferimento X, Y.
B*
X*B = X’A + x*
X*B;Y*B
Y*B = Y’A + y*
A*n
Y
yN
A*3
(AB*)
(AB’)
(AA1)*
X’A;Y’A
A
O
X
B
X B' X A'
( AB) arctg '
YB YA'
'
(AA1)
X’B;Y’B
A* 2
A*1
A1
An
X B* X A'
( AB) arctg *
YB YA'
*
A3
A2
( AB)' ( AB)*
28
POLIGONALI PARTICOLARI
L’angolo rappresenta la rotazione della poligonale fittizia della quale già si
conoscono gli azimut dei lati.
Ciascun azimut della poligonale fittizia verrà poi corretto del valore ±,
ottenendo gli azimut di tutti i lati della poligonale reale A, A1, A2, A3…B.
(AA1) = (AA1)* ±
(A1A2) = (A1A2)* ±
(A2A3) = (A2A3)* ±
...............................
(AnB) = (AnB)* ±
Ottenuti gli azimut dei lati della poligonale reale A, A1, A2, A3…B (ricordiamo però
che essi non sono né controllati né compensati), il suo calcolo proseguirà come
una normale poligonale aperta vincolata con controllo e compensazione lineare.
29
LE MISURE SULLE
POLIGONALI
LA SCELTA DEI VERTICI
Il rilievo di una poligonale inizia con un minuzioso e attento sopralluogo sul terreno interessato
per individuare i vertici che andranno scelti in modo da rispettare le seguenti regole
fondamentali:
1. i vertici devono essere individuati e materializzati a mezzo di picchetti, o da chiodi sulle
superfici non penetrabili, in modo che da ciascuno di essi sia visibile il vertice precedente e
quello seguente (per la misura dell'angolo al vertice);
2. il terreno tra due vertici consecutivi dovrà essere il più possibile sgombro da ostacoli, in
particolare se la misura della dei lati avviene in modo diretto;
3. in una poligonale aperta i vertici devono discostarsi il meno possibile dalla congiungente i
due estremi della poligonale stessa;
4. da ciascun vertice dovrà essere visibile un’adeguata estensione di terreno in modo che da
esso sia poi facile partire per eseguire il successivo rilievo dei particolari topografici del
terreno.
I vertici vengono provvisoriamente segnalati con paline, quindi, una volta definita la loro
posizione, le stesse vengono sostituite con picchetti in legno o con picchetti di ferro
(talvolta con pilastrini in muratura). Di ciascuno di essi deve poi essere redatta un’adeguata
monografia, oltre all’eidotipo della zona di terreno da rilevare da quel vertice.
31
LA MISURA DEI LATI
● Nella misura delle lunghezze dei lati di una poligonale, in
relazione alla precisione da rispettare, alla lunghezza dei lati
e alla conformazione del terreno, vengono di norma utilizzati
i seguenti apparati (in ordine di importanza):
1. Geodimetri elettronici.
2. Misura indiretta (per poligonali speditive).
3. Cordelle metriche per la misura diretta.
Utilizzando i geodimetri elettronici, e se non vi sono
problemi di visibilità, è opportuno posizionare il prisma
riflettente direttamente sul picchetto che segnala il
vertice, in modo da evitare la diminuzione di precisione
dovuta alla eventuale non perfetta verticalità del bastone
portaprisma.
Se ciò non è possibile occorre utilizzare appositi
treppiedi che mantengono l’asta portaprisma verticale
per tutta la durata delle operazioni di misura.
32
LA MISURA DEGLI ANGOLI
● Nella misura degli angoli al vertice compresi tra due lati consecutivi,
vengono di norma utilizzati i seguenti apparati (in ordine di importanza):
1. Geodimetri elettronici.
2. Teodoliti 1”-10” (per poligonali di precisione).
3. Tacheometri 30”-60” (per poligonali speditive).
La misura di un generico angolo al vertice n inizia con la stazione del
goniometro sul vertice An. Successivamente, collimando il vertice
precedente An–1 e quello seguente An+1, opportunamente segnalati da
paline, si faranno al cerchio orizzontale del goniometro le relative letture.
L’angolo al vertice n sarà determinato dalla differenza di queste
letture.
An–1
An+1
n
Ln–1
0c
A
n
Ln+1
n=Ln+1–Ln–1
33
ERRORE DI CENTRAMENTO
● Nella misura degli angoli, soprattutto per vertici ravvicinati, è assai temibile
l’errore di centramento del goniometro (o del segnale) sul vertice.
● Infatti, posizionando lo strumento, o le mire, sui vari vertici della poligonale, il
centramento effettuato con mezzi ordinari (piombino ottico) avviene con errori
dell’ordine di qualche millimetro (3-4 millimetri). Questo errore influenza le letture al
CO, Ln–1 e Ln+1 , dunque anche l’angolo al vertice n.
● L’angolo rappresenta
An–1
l’errore di cui è affetta la lettura
al cerchio Ln–1
d
Ln–1
0c
L’n–1
0c
● Essendo d molto più grande di
e, possiamo considerare e come
un arco di cerchio di raggio d.
e An
A’n
rad
e
d
"
e
206265
d
L’errore angolare , provocato dal non perfetto centramento dello strumento sul vertice, è
inversamente proporzionale alla lunghezza dei lati. Pertanto i vertici dalla poligonale andranno
scelti in modo da limitare la presenza di lati corti (inferiori ai 70-80 m).
34
CENTRAMENTO FORZATO
● Maggiore precisione nella misura degli angoli si ottiene ricorrendo a una procedura
operativa denominata centramento forzato. Essa è realizzabile a mezzo di strumenti (teodoliti e mire) separabili da un comune basamento e intercambiabili sul
basamento stesso.
● Distribuzione di goniometro e mire durante la misura dell’angolo al vertice su An
● Distribuzione di goniometro e mire durante la misura dell’angolo al vertice su An+1
An–1
An+1
n
An
An+2
35
 (y A ) - itet g. maggiolini – area cat")