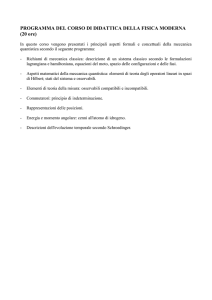
Capitolo 7
Il problema della non-località
nella MQ
L’argomento EPR-Bohm-Bell
1 Stati Entangled
2 Esposizione qualitativa di EPR
3 Dimostrazione del teorema di Bell
4 Risultati sperimentali
5 Conseguenze concettuali e implicazioni
filosofiche
7.1 Stati entangled
“Io considero l’entanglement non uno ma il tratto più
caratteristico della meccanica quantistica, quello che
implica il suo completo distacco da qualsiasi concezione
classica”
E. Schroedinger
Stati fattorizzati e non fattorizzati (Ghirardi p. 430 e ss)
Uno stato fattorizzato è uno stato Y dello spazio composto H che
risulta il prodotto diretto (o tensoriale) di stati appartenenti ai
sistemi componenti H1 e H2:
(1)
( 2)
Y
Y (1) ( 2) [ ai i ] [ b j j ] aib j [(1) ( 2) j ] cij [(1) ( 2) j ]
(1)
i
( 2)
j
ij
ij
Nello spazio H associato al sistema composto esistono anche stati
non fattorizzati, che corrispondono a combinazioni lineari di stati
fattorizzati in cui i fattori sono autovettori con autovalori distinti. Il
problema concettuale principale in questo contesto è se e quando è
possibile attribuire proprietà definite o oggettive ai componenti di
uno stato non fattorizzato di H. Se lo stato fattorizzato ha come
fattori autovettori di osservabili A e B relative ai sistemi
componenti, allora i componenti possiedono proprietà oggettive.
Se lo stato fattorizzato è FF = (1) i ( 2) j e
A(1) (1) i ai (1) i ; B ( 2) ( 2) j b j ( 2) j
allora gli stati componenti posseggono le proprietà ai e bj
indipendentemente da un processo di misura, dato che FF è
autostato di A(1) I (2) e di
I (1) B ( 2) (ciascun prodotto
tensore è un operatore autoaggiunto relativo a H) con gli
autovalori sopra riportati.
Se, “dato un qualsiasi stato di uno spazio di Hilbert esiste sempre
un operatore autoaggiunto di cui esso è autostato e se si assume
che ogni operatore autoaggiunto rappresenti un’osservabile,
allora può concludersi che nel caso di un sistema fisico
individuale (…) associato a uno stato fattorizzato, i costituenti
del sistema possiedono, ciascuno, una precisa proprietà
oggettiva” (Ghirardi p. 431)
~ (1, 2)
Y a(1) i ( 2) j b(1) r ( 2) s ; | a |2 | b |2 1
Ecco uno stato puro entangled (verschraenkt) del sistema
composto associato a H, in cui i fattori dei due termini della
sovrapposizione risultano autovettori delle osservabili A e B con
autovalori distinti.
Abbiamo quindi una probabilità |a|2 che dopo una misura i due
sistemi componenti rivelino l’autovalore ai per l’osservabile A e
l’autovalore bj per l’osservabile B (lato sinistro della
sovrapposizione) e probabilità |b|2 di rivelare invece gli
autovalori ar e bs per il sistema associato a H(1) e H(2)
rispettivamente ( con a e b diversi da 0 e 1)
Ne segue che le due parti del sistema composto (il “tutto”) il
cui stato è la sovrapposizione qui in alto non hanno proprietà
oggettive o definite!
È solo se si suppone che f(1)i e f(2)r siano autovettori relativi allo
stesso autovalore c di un operatore degenere C(1) - cosicché i due
autovettori appartengano alla stessa autovarietà - che il vettore di
stato del sistema composto è un autostato di un’osservabile e i
componenti hanno proprietà definite
~ (1, 2)
[C I ]Y [C (1) I (2) ] ((1) i ( 2) j (1) r ( 2) s )
(1)
c
(2)
(1)
i
( 2)
j
c
(1)
r
( 2)
s
~ (1, 2)
cY
Per un sistema composto in uno stato di sovrapposizione di due o
più stati fattorizzati, i costituenti del sistema non hanno proprietà
oggettive, anche se il sistema come un tutto ha sempre qualche
proprietà (c’è un osservabile di cui lo stato è un autostato). In
generale, se si lascia evolvere liberamente uno stato fattorizzato
dopo aver fatto interagire le sue parti, i costituenti perdono le
proprietà definite e solo il tutto le mantiene nel senso visto.
Dato che tutto interagisce prima o poi con tutto il resto, le
particelle che compongono il nostro corpo sono
inestricabilmente entangled con tutto il resto dell’universo
“L’universo indiviso” di cui parlano Bohm e Hiley (1989) è
una forma di olismo in cui solo la funzione d’onda che descrive
l’universo ha una sua definitezza, mentre tutte le sue
componenti non possiedono alcuna proprietà oggettiva
Dunque non è vero, come spesso pensano i filosofi che non
conoscono le scienze naturali ma ne pontificano spesso, che
l’olismo è una caratteristica che si ritrova solo nella mente o
nelle scienze umane.
Ovviamente, ci sono vari “olismo”: olismo delle credenze, del
significato, della conferma (Duhem-Quine), e l’olismo della MQ
è diverso da questi altri tipi di olismo
In tutti i casi, nell’olismo c’è l’idea che le proprietà delle parti dipendano da
quelle delle altre parti o addirittura da quelle del tutto. A volte c’è l’idea che il
tutto sia più della somma delle parti. Nel caso quantistico, l’olismo ha vari
significati, che apprezzeremo fino in fondo quando tratteremo la non-località. Per
ora, c’è l’idea che le parti di un tutto che hanno interagito e che sono in uno stato
non fattorizzato non possiedono proprietà definite prima della misura e le
acquisiscono “tutte insieme” con una misura.
ESERCIZIO (Si veda Ghirardi 1997, pp. 433-4)
Dopo aver ricordato la generica forma di un generico vettore di spin semintero
a , a, b C, | a |2 | b |2 1
b
dimostriamo per esercizio che per ogni stato Y dello spazio di spin esiste
sempre una direzione n tale che Y risulta autovettore dell’operatore sn (che da
la componente dello spin in quella direzione prescelta) con autovalore unitario
sn |Y> +1 |sn>. Scriviamo il nuovo operatore in funzione del versore n =
(nx+ny+nz), “proiettando” quindi le matrici di Pauli s = (sx, sy ,sz) in quella
direzione,ovvero facendo il prodotto scalare tra n e s
2
2
2
n (nx , n y , nz ), n x n y n z 1, n versore
s n s x nx s y n y s z nz
nx in y
nz
0
1
0
i
1
0
s n
nx
ny
nz
nz
1 0
i 0
0 1
nx in y
nx in y a
nz a (nx in y )b a
nz
a
|
1
2
2 1
a
|
|
b
|
b
b
nz
(nx in y )a nz b b
nx in y
a *[nz a (nx in y )b] aa* | a |2 nz | a |2 (nx in y )a * b | a |2
b *[( nx in y )a nz b] bb* | b |2 b * a(nx in y ) nz | b |2 | b |2
Dopo aver moltiplicato entrambi i membri per i complessi coniugati di a e b, sommo
membro a membro, ottenendo 1 a destra perché il vettore di spin è normalizzato
nx (a * b b * a) n y i (b * a a * b) nz (| a |2 | b |2 ) 1
1
1
Re[ b * a] (b * a a * b); Im[ b * a] (b * a ba*)
2
2i
nx (a * b b * a) nyi(b * a a * b) nz (| a |2 | b |2 ) 1
I coefficienti che moltiplicano le componenti del versore n (le
espressioni tra parentesi) sono quindi(dx=2Re[ab*], dy= -2Im[ab*],
dz=1-2|b|2). Quadrando i coefficienti si ha dx2 + dy2+ dz2 =1, come
dev’essere per un vettore di spin
(a * b) 2 (b * a) 2 2 | a |2 | b |2 (b * a) 2 (b * a) 2 2 | a |2 | b |2
| a |4 2 | a |2 | b |2 | b |4 | a |4 2 | a |2 | b |2 | b |4 (| a |2 | b |2 ) 2 1
Sostituiamo ora i valori di d nella matrice trovata sz , ,verificando
quel che volevamo dimostrare, ovvero che esiste una direzione
rispetto alla quale lo stato di spin di componenti generiche (a, b) è
austostato con autovalore 1 (in unità di h/2p)
1 2 | b |2
sd
2a * b
2ab *
a
a
s
1
b
d b
2 | b |2 1
QED!
Troviamo gli autovettori az e bz dell’operatore sz
nz w nx in y
det( s z wI) det
0
nx in y nz w
2
2
2
2
2
2
2
2
nz w n x n y 0 w n x n y nz 1 w 1
Sostituiamo i due autovalori trovati nella matrice di cui sopra
nz 1
nx in y
a
nx in y a x 0
(nz 1)a x (nx in y )a y 0
nz 1 a y 0 (nx in y )a x (nz 1)a y 0
w 1
(nz 1)a x (nx in y )a y a x (nx in y ); a y (nz 1)
w 1
(nx in y )a x (nz 1)a y a x (nz 1); a y (nx in y )
n( w1)
1
1
1 nz
(nx in y )
n in ; b n( w1)
y
2(1 nz ) x
2(1 nz ) 1 nz
a
n( w1)
b n( w1)
1
1 nz
n in
y
2(1 nz ) x
1
(nx in y )
1
n
2(1 nz )
z
Scriviamo gli autovettori di sz
1
0
a z ; b z
0
1
Poiché gli autovettori di sz sono una base completa dello spazio di
spin, possiamo esprimere gli autovettori di sn come loro
combinazione lineare
nx in y
(nx in y )
1 nz
1 nz
an
az
b z ; bn
az
bz
2(1 nz )
2(1 nz )
2(1 nz )
2(1 nz )
(1)
YF a c
b
d
( 2)
In uno stato fattorizzato di un sistema composto,
esistono per le ragioni viste una direzione relativa al
primo e una al secondo componente, con autovalore
+1, che ci consentono di dire che YF è autostato di
entrambe e i componenti hanno proprietà di spin
definite
YS
(1, 2 )
1 (1) ( 2) (1) ( 2 )
[a z b z b z a z ]
2
In questo stato di singoletto, si ha uno stato entangled, e si ha
probabilità ½ di trovare la prima particella con spin lungo z in su
e la seconda con spin lungo z in giù, e ½ di trovare la situazione
opposta (la prima particella con spin lungo z in giù e la seconda
con spin lungo z in su). Queste conclusioni valgono per
qualunque direzione n si scelga:
YS
(1, 2 )
1 (1) ( 2) (1) ( 2 )
[a n b n b n a n ]
2
come si può verificare prima sostituendo alle espressioni per an e
bn le espressioni trovate nella pagina precedente e poi facendo i
prodotti tensori che così si trovano
7.2 Esposizione qualitativa di EPR
a
A e B sono separati da intervalli di tipo spazio, ovvero
non sono connettibili da alcun segnale, nemmeno dalla
luce
A
b
B
Condizione di realtà di EPR
“Se, senza disturbare in alcun modo un sistema, è possible
prevedere con certezza (vale a dire, con probabilità pari a 1) il
valore di una quantità fisica, allora esiste un elemento di realtà
fisica che corrisponde a questa quantità”
Condizione di località di EPR
“Gli elementi di realtà fisica di un sistema non possono essere
influenzati istantaneamente a distanza”
Prendiamo due particelle a e b in uno stato entangled:
(1, 2 )
1
2
1
1
1
2
2
2
posizionate in due zone A e B distanti nello spazio, in cui ci siano
due apparati misuratori dello spin, e assumiamo la condizione di
(i) realtà di EPR e di (ii) completezza.
Allora il fatto di poter prevedere con certezza pari a 1, e prima di
eseguire la misura, che cosa si otterrà dall’altra parte
dell’esperiemento, basta, in base alla condizione di realtà
esplicitata nella pagina precedente, a concludere che esiste un
elemento di realtà oggettiva e definita che la teoria ufficiale non
descrive, dato che lo stato qui sopra è puro, ed è uno stato di
sovrapposizione privo di proprietà relative allo spin lungo una
direzione. Ne segue che o la MQ è non locale o incompleta ed
EPR optano per la incompletezza, senza proporre alcuna teoria
7.3 Il teorema di Bell (“On the
EPR paradox”, Physics 1, 1964)
È tra i risultati più importanti della fisica della
seconda metà del 900, e non solo da un punto
di vista concettuale e filosofica, visto che ha
aperto la strada a numerosissimi esperimenti
(vedi Entanglement di A. Aczel, Cortina
editore, 2004, per una storia divulgativa degli
esperimenti nati a partire dagli anni 70.)
a
A
A e B sono separati da intervalli di tipo spazio, ovvero
non sono connettibili da alcun segnale, nemmeno dalla
luce
b
B
Due particelle vengono sparate in direzioni opposte e misurate nelle regioni
spazio-temporali A e B, separate da intervalli di tipo spazio. Sia a il risultato di
misura effettuato sulla prima particella in A, sia a la direzione spaziale in cui si
effettua la misura e sia l la eventuale variabile nascosta; sia b il risultato di misura
in B effettuato nella direzione b sull’altra particella. Il requisito di località di Bell è
che la probabilità congiunta pAB di ottenere a da una parte dell’esperimento e b
dall’altra è dato dal prodotto delle due probabilità singolarmente considerate. Un
altro modo per descrivere tale località è quello di affermare che gli eventi dati dai
due risultati di misura sono probabilisticamente indipendenti l’uno dall’altro e il
risultato di misura in A dipende solo dal parametro locale a e dalla variabile
nascosta. Indichiamo con p(a|*a) la probabilità condizionata di ottenere il risultato
a se si misura nella direzione a e nessuna misura viene eseguita dall’altra parte
(*). Analogamente per l’altra probabilità. Si ha allora
Bell ' slocality plAB (a b | a b) plA (a | *a) plA (b | *b)
LB= plAB(a,b;a,b) plA(a,*;a) plB(b,*;b)
Questa formula rende precisa l’idea originale di EPR che se c’è
località il risultato da un parte dell’esperimento non deve
dipendere da ciò che si misura dall’altra parte e addirittura dal fatto
che si faccia una misura dall’altra parte.
se un esperimento di tipo EPR-Bohm deve essere localmente
spiegabile magari anche tramite variabili l che completino la
teoria standard, allora le probabilità dei risultati di misura alle due
ali A e B dell’esperimento devono essere statisticamente
indipendenti.
Per un semplice teorema del calcolo delle probabilità, ne segue che
una qualsiasi teoria che intenda descrivere lo stato del sistema a+b
in modo locale, deve assegnare una probabilità ai due eventi che
sia uguale al prodotto delle probabilità assegnate ai due eventi di
misura presi singolarmente.
Prendiamo due particelle 1 e 2 in uno stato non
fattorizzabile:
(1, 2 )
1
2
1
1
1
2
2
2
posizionate in due zone A e B distanti nello spazio,
in cui ci sono due apparati misuratori: uno che può
misurare lo spin di a in direzione a o c, e il secondo
che può misurare lo spin di b in direzione b o d.
Consideriamo la quantità che esprime la differenza tra risultati
discordi :
El(a,b)= plAB(a,b;up, up)- plAB(a,b;up, down) plAB(a,b;down, up)+ plAB(a,b;down, down)
Per LB, si ottiene:
El(a,b)= plA(a,*;up) plB(b,*;up)- plA(a,*;up) plB(b,*;down)plA(a,*;down) plB(b,*;up)+plA(a,*;down)
plB(b,*;down)
Da cui:
El(a,b)=[plA(a,*;up)- plA(a,*;down)] [plB(b,*;up)- plB(b,*;down)](1)
Ripetiamo il calcolo per la quantità per le due direzioni a (nella
regione A) e d (nella regione B):
El(a,d) = plAB(a,d;up, up)- plAB(a,d;up, down)- plAB(a,d;down,
up)+ plAB(a,d;down, down)
Che per LB diventa:
El(a,d)= plA(a,*;up) plB(d,*;up)- plA(a,*;up) plB(d,*;down)plA(a,*;down)plB(d,*;up)+ plA(a,*;down)plB(d,*;down)
E quindi
El(a,d)= [plA(a,*;up)- plA(a,*;down)] [plB(d,*;up)- plB(d,*;down)]
(2)
Sottraendo la quantità rossa da quella blu, ovvero la 2) dalla (1), si
ottiene la (3) qui sotto:
El(a,b)- El(a,d)= [plA(a,*;up)- plA(a,*;down)]
[[plB(b,*;up)- plB(b,*;down)]- [plB(d,*;up)- plB(d,*;down)]] (3)
Ma plA(a,*;up)+ plA(a,*;down)=1, per cui
plA(a,*;up)- plA(a,*;down)=1-2 plA(a,*;down)
Poiché però 0< plA(a,*;down)<1, allora
-1 < 1-2 plA(a,*;down) < 1 e dunque, prendendo il valore assoluto
|1- 2 plA(a,*;down)|< 1
(4)
Poiché il valore assoluto del prodotto di due numeri è uguale al
prodotto dei valori assoluti dei due numeri, applicando la (4), si ha:
|El(a,b)- El(a,d)| = |1-2plA(a,*;down)|
|[[plB(b,*;up)-plB(b,*;down)]-[plB(d,*;up)- plB(d,*;down)]]|
|El(a,b)- El(a,d)| < |[plB(b,*;up)- plB(b,*;down)]- [(plB(d,*;up)plB(d,*;down)]|
(5)
Consideriamo adesso l’altra direzione c lungo cui è possibile
misurare la particella nell’ala A dell’esperimento.
Con lo stesso ragionamento si riottiene la (5) dell’ultimo lucido, con
l’unica differenza data dalla variabile c al posto di a e dal segno +:
|El(c,b) + El(c,d)| < |[[plB(b,*;up)- plB(b,*;down)] + [plB(d,*;up)plB(d,*;down)]]|
(6)
Sommando la (5) e la (6) si ottiene:
|El(a,b)-El(a,d)| + |El(c,b)+El(c,d)| < |[[plB(b,*;up)plB(b,*;down)] - [plB(d,*;up)- plB(d,*;down)]]| +
+ |[[plB(b,*;up)- plB(b,*;down)]+ [plB(d,*;up)- plB(d,*;down)]]|
r
s
|El(a,b)-El(a,d)| + |El(c,b)+El(c,d)| < |r-s|+|r-s|
r-s
Positivo
Positivo
Negativo
Negativo
r+s
r
s
Positivo Positivo
Negativo
Negativo
Positivo
Positivo
Negativo Negativo
r+s + r-s
2r
-2s
2s
-2r
Si noti che nella prima fila si ha r-s + r-s = 2r, nella seconda r-s –r-s
= -2s, nella terza –r+s+r+s=2s e nell’ultima –2r. Ricordando che
r = [plB(b,*;up)- plB(b,*;down) ], e s = [plB(d,*;up)- plB(d,*;down)]
e che |1- 2 plA(a,*;down)|< 1
si ha che sia r che s sono minori o uguali a 1. Ne segue la DB:
|El(a,b) - El(a,d)| + |El(c,b)+El(c,d)| < 2
La dimostrazione di Bell, però, vuole considerare la possibilità che
una eventuale completamente locale della MQ sia governata da
variabili l che noi non possiamo controllare, e di cui, perciò, non
conosciamo il valore se non in senso statistico.
Perché la disuguaglianza appena provata valga anche per una
teoria a variabili nascoste che riproduca le previsioni statistiche
quantistiche, dobbiamo fare una media pesata della quantità che è
argomento della disuguaglianza rispetto una distribuzione di
probabilità r(l) su l, che è poi l’unica quantità fisicamente
misurabile:
E(a, b )
Eλ (a, b )r(l )dl
(7)
In questo caso r(l) è la funzione che riproduce la distribuzione di
probabilità che risulta dal procedimento di preparazione del sistema
Dimostriamo che anche la media E(a,b) soddisfa la disuguaglianza
vista prima, per cui
|E(a,b)-E(a,d)| + |E(c,b)+E(c,d)| < 2
Per la dimostrazione, oltre alla (7), usiamo il fatto che la funzione
r(l) è positiva e il suo integrale è unitario (è una probablità) e il
fatto che l’integrale di un modulo maggiora il modulo
dell’integrale:
E(a, b) - E(a, d) E(c, b) E(c, d)
dlr(l)[E (a, b) - E (a, d)] dlr(l)[E (c, b) - E (c, d)]
l
l
l
l
dlr(l) [E (a, b) - E (a, d)] dlr(l) [E (c, b) - E (c, d)]
l
l
l
l
dlr(l)( [E (a, b) - E (a, d)] [E (c, b) - E (c, d)] ) 2 dlr(l) 2
l
l
l
l
E(a, b) - E(a, d) E(c, b) E(c, d) 2
Questa è la disuguaglianza di Bell nella forma di Clauser, Horne,
Shimony e Holt (1969)
Tale disuguaglianza è violata dalla MQ. In MQ le probabilità
congiunte relative ai risultati delle misure in A e in B, relativi
all’angolo ab compreso tra le due direzioni a e b sono:
plAB(a,b;up, up)= plAB(a,b; down, down)=1/2 sin2(ab)
plAB(a,b;up, down)= plAB(a,b; down, up)=1/2 cos2(ab)
Da cui si deriva che per la MQ:
El (a,b) = 1/2 sin2(ab) + 1/2 sin2(ab) - 1/2 cos2(ab) -1/2 cos2(ab)
=-cos (2ab)
Se applichiamo alla quantità
El(a,b)-El(a,d) + El(c,b)+El(c,d)
queste probabilità su determinati angoli a=0°, b=22.5°, c=45°,
e d=67.5° , si ottiene un valore maggiore di 2, per cui si
dimostra che le probabilità della MQ violano la disuguaglianza
data.
Bell, infine dimostra che la differenza tra E(a,b)=-cos(a-b)
calcolato dalla MQ e E(a,b) calcolato da una teoria locale, non
può essere resa arbitrariamente piccola.
Per cui, conclude Bell, “the quantum mechanical expectation
value cannot be represented, either accurately, or arbitrarily
closely, in the form
E(a, b ) dlr (l )E λ (a, b )
“On the Einstein-Podolsky-Rosen paradox”, J. S. Bell. 1964.
In “Speakable and unspeakable in quantum mechanics”.
Rimane in effetti ancora una possibilità che salverebbe la
località della MQ.
Si può ipotizzare che la semplice sistemazione dell’apparato
misuratore di A in posizione a, piuttosto che in c, influenzi il
risultato della misura su B e che tale influenza sia locale. La
sistemazione di un apparato misuratore, infatti, non è
un’operazione eseguibile in un lasso di tempo abbastanza
breve da poter cominciare dopo l’emissione delle particelle e
terminare prima del loro arrivo agli apparati- va dunque
eseguita prima dell’emissione delle particelle dalla fonte.
Ciò significa che un segnale (un processo causale,
un’informazione..) mandato dall’apparato misuratore sino alle
particelle (o sino all’altro apparato) avrebbe tutto il tempo di
influenzare la misura all’altro capo dell’esperimento
mantenendo sempre una velocità al di sotto di quella della
luce.
C’è quindi la possibilità, che la MQ sia una teoria di limitata
validità:
“Essa si potrebbe applicare unicamente ad esperimenti in cui le
sistemazioni degli strumenti sono fatte sufficientemente in anticipo
per permettere ad essi di raggiungere qualche mutuo rapporto
tramite scambio di segnali con velocità minore o uguale a quella
della luce.”
Per dare una risposta definitiva a tale questione fu necessario
aspettare sino al 1982, quando l’esperimento di Alain Aspect
falsificò questa ipotesi.
Il risultato dell’esperimento di Aspect è che le previsioni della
MQ vengono nuovamente rispettate: questo esperimento è
considerato la prova definitiva che la MQ non può subire un
completamento locale.
7.4 Il significato concettuale del
teorema di Bell e degli
esperimenti ad esso seguiti
Si noti che la teoria a variabili nascoste considerata è del tutto generale,
nel senso che l fissa le probabilità dei risultati, e nulla impedisce che
tali probabilità siano sempre 0 o 1, e si abbia dunque a che fare con una
teoria deterministica. Nel caso in cui le disuguaglianze di Bell siano
violate sperimentalmente, come effettivamente accade, si è così
dimostrato che non può esistere una teoria a variabili nascoste
(stocastica o deterministica che sia) che sia anche locale nel senso di
Bell.
Più in generale e tornando a EPR, ne segue che se l’alternativa posta da
EPR era tra completezza e località della MQ, qualunque teoria che
riproduca le correlazioni quantistiche può essere completa solo se nonlocale nel senso di Bell! La prova formale di questa asserzione è data
nella pagina seguente. Ne segue, per esempio, che la luna c’è solo se la
si osserva, nel senso che se le proprietà di spin in una direzione non
preesistono alla misura; piuttosto, esse sono create a distanza dalla
misura, ovvero dall’atto di osservare!
Molti fisici asseriscono che la violazione sperimentale delle disuguaglianze di
Bell conferma la meccanica quantistica a scapito della teoria a variabili nascoste.
Ma una teoria a variabili nascoste non-locale è compatibile con i dati sperimentali
e non è refutata da questi. Inoltre, l’ipotesi di definitezza delle proprietà o
realismo non è necessaria per ricavare le disuguaglianze stesse, cosicché anche la
MQ è non-locale.
1)Anticorr 100% & LB Determinismo (dimostrata nella p. seguente)
2)Determinismo & LB Dis. Bell
(teorema di Bell)
3)MQ -(Dis. Bell)
4) - Dis. Bell -Determinismo v –LB (dalla 2)
nella seconda alternativa QED da 3 e 4,per cui esaminiamo solo la prima alternativa
5)-Determinismo-Anticorr 100% v –LB (dalla 1)
ma la prima alternativa è falsa perché MQ implica Anticor 100% e rimane la seconda
6) MQ-LB
QED
Se valgono le anti-correlazioni perfette, per una stessa direzione
n, qualunque essa sia,non si hanno mai risultati identici, mentre è
equiprobabile ottenere +1 a destra e –1 a sinistra o viceversa
plAB (n, n | 1,1) 0 plAB (n, n | 1,1)
p
AB
l
1
(n, n | 1,1) plAB (n, n | 1,1)
2
Dalla prima equazione a sinistra, applicando LB, e ricordando
A (n | * 1)
p
che i risultati
sono
1
o
–1,
si
ottiene
che
o
è
nullo
o
l
l
p (n | * 1)
è nullo B
. Non sono nulli entrambi per le ultime 2
equazioni della pagina, ovvero non si può avere –1 da entrambe
le parti con prob. 1, perché il prodotto deve dare 0
plAB (n, n | 1,1) plA (n | * 1) plB (n | * 1) 0
1) plA (n | * 1) 0 plA (n | * 1) 1 oppure
2) plB (n | * 1) 0 plB (n | * 1) 1
plAB (n, n | 1,1) plA (n | * 1) plB (n | * 1) 0
Dalla 1) e da questa eq. si ricava che se plA (n | * 1) 1 allora
plB (n | * 1) 0 E quindi anche che plB (n | * 1) 1
In sintesi, dalla 1) si ricava che
plA (n | * 1) 0, plA (n | * 1) 1 plB (n | * 1) 0, plB (n | * 1) 1
Ragionando sulla 2) nell’identico modo, si hanno le seguenti
relazioni, che completano la dimostrazione:
plA (n | * 1) 0, plA (n | * 1) 1
plB (n | * 1) 0 plB (n | * 1) 1
ogni probabilità relativa a una sola misura può quindi assumere solo
i valori 1 e 0 e, nell’ipotesi di anticorr.100% e di LB, vale quindi il
determinismo
Riassumendo, la disuguaglianza di Bell, che è
tanto
semplice
matematicamente
quanto
concettualmente ricca, è deducibile solo da LB (la
condizione di località di Bell) e dalle predizioni di
anticorrelazione
quantistiche.
Poiché
la
disuguaglianza è violata sperimentalmente, se si
vogliono
riprodurre
le
predizioni
di
anticorrelazione, si deve abbandonare la nonlocalità di Bell. In questo senso, qualunque teoria
che riproduce le anticorrelazioni (e dunque anche
la MQ “ordinaria”) è non-locale nel senso di Bell.
È in questo senso che gli esperimenti hanno
provato che la natura stessa è non-locale: un
esempio di metafisica sperimentale
7.5 Non-località e segnali
superluminale
Ovvero, il rapporto tra QM e
relatività speciale: coesistenza
pacifica
Indichiamo con W(1,2) l’operatore statistico relativo a un
insieme composto S =S1 +S2 supponendo di avere a che
fare con un insieme statistico (non omogeneo) di tali
sistemi S. Restringiamo la nostra attenzione al sistema
S1 e ad una sua osservabile A1, costruendo l’operatore
relativo al sistema composto A1 I2 con A operatore
limitato di S1 e I operatore identità di S2. In generale,
ricordiamo che per un operatore B limitato e uno stato
puro Y si ha
Tr (PY B) i PY Bi idem. i P 2 Y Bi hermit. PY i PY Bi
i
i
i
PY 1 Y Y PY BY herm. PY Y BY Y |B Y B >
Per una miscela di stati puri, ognuno dei quali ha
probabilità pa ,il valor medio di un operatore B è dato dal
prodotto delle probabilità per i valori medi che possono
assumeri i sistemi nei vari stati Ya
<B>=Sa pa <Ya|B| Ya >= Sa pa Tr (PYaB)=Tr(WB)
Dove W= Sa paPYa
Valutando la traccia su una base fattorizzata f12
calcoliamo il valore medio o aspettato di S1I2
Tr[(S1 I2 )W]=
f1i 2 j ( A1 I 2 )W 1, 2 f1i 2 j
=
ij
i
fi A
1
1
j
2
j
W
1, 2 2
j
2
fi
1
1
i
~1 1
~1
1
fi A W fi Tr ( A W )
1
1
1
L’operatore W1tilde= Sj 2 j W 1, 2 2 j
2
è un operatore di H1
Come si vede, la fisica dell’insieme statistico di S1 si può
descrivere utilizzando l’operatore statistico ridotto W1 tilde,
ottenuto facendo la traccia, nello spazio di Hilbert H2,
dell’operatore statistico W1,2 relativo all’insieme dei
sistemi composti (ciò corrisponde a porre lo stesso indice
e a sommare i valori degli indici del secondo sistema:
vedi nota 23, p. 440, Ghirardi)
~1
W Tr ( 2)W 1, 2 2 r W 1, 2 2 r
5.3
r
Se S1 è omogeneo, W1,2 coincide con un proiettore PY1,2
che proietta su uno stato monodimensionale Y1,2
2
~1
1
2
1
,
2
2
1
,
2
2
W Tr P r P r pi Pi , pi cij
r
i
j
P1 è l’operatore di S1 associato allo stato f1i.. Poiché se lo stato Y1,2
non è fattorizzato l’ultima somma della pagina precedente contiene più
di un termine, l’operatore statistico W1 non è idempotente, e quindi dal
punto di vista del componente S1 l’insieme è come se fosse una
miscela statistica, malgrado lo stato composto S sia puro. Ne segue
che, per esempio, eseguendo misure solo su uno dei due stati di
singoletto, non si può distinguere lo stato puro da un’opportuna
miscela di stati puri di spin, mentre le misure di correlazione sui due
sistemi mostrano l’entanglement. Tornando ora al nostro problema, sia
Ps la famiglia di proiettori di un operatore discreto: la misura trasforma
l’operatore statistico Wprima nell’operatore
Wdopo = Ss Ps Wprima Ps
5.4
Supponiamo ora di misurare S2 e siano Ps(2) gli operatori di proiezione
sulle autovarietà corrispondenti:
W1,2 (misura) W#dopo1,2 = Ss Ps2 Wprima1,2 Ps2
5.5
D’altra parte, sulla base di ciò che abbiamo visto in 5.3,
qualunque informazione statistica relativa al sistema 1 si
ottiene considerando l’operatore statistico ridotto W#(1),
ottenuto facendo la traccia parziale sullo spazio H2
dell’operatore statistico del sistema composto W1,2
W#(1)=Tr (2)(W#dopo1,2 ) = Tr (2) (SsP2sW1,2prima P2s) =
Ss Tr(2) (P2sW1,2 P2s)=ciclicità traccia Ss Tr(2)(P2sP2sW1,2)=idempot P
Tr (2) (Ss P2s)W1,2 = Tr (2) IW1,2 = W1tilde per la 5.3
L’istantanea riduzione del pacchetto non consente effetti superluminali, visto che
l’operatore statistico W#(1) che si deve usare per valutare la probabilità di eventi
fisici relativi a S1 nel caso in cui l’altro composto è stato assoggettato a misura è
uguale all’operatore statistico W1tilde che andrebbe utilizzato per la descrizione del
sottosistema S1 prima che si sia effettuata una misura.(Ghirardi p. 461). Si tratta
quindi non di una azione ma di una passione a distanza
Per ciascuno di due osservatori ai lati di un
esperimento di tipo Aspect, fatto con spin o con fotoni
polarizzati, si ottiene una successione casuale sia che
si misuri la polarizzazione e lo spin anche dall’altra
parte sia che non si misuri: dunque c’è una “località di
tipo statistico,” perché dal tipo di successione che si
ottiene da una parte o dall’altra (perfettamente
random) non c’è modo di sapere se l’altro ha misurato
oppure no. In altre parole, ciascun osservatore, non
potendo controllare l’esito delle misure, non può
mandare segnali utilizzando la non-località.
Per concludere, osserviamo che la non località in questione NON
può essere utilizzata per mandare segnali istantanei a distanza: ne
segue che secondo molti studiosi (ma non tutti, vedi Maudlin,
Quantum nonlocality and relativity) si può parlare di una
“coesistenza pacifica” tra relatività speciale e meccanica quantistica,
malgrado la violazione della località secondo Bell, ovvero malgado
la non fattorizzabilità della probabilità di un sistema in stato di
singoletto.
La differenza che passa tra possibilità di segnalare e nonfattorizzabilità può anche vedersi come la differenza che c’è tra la
indipendenza dal parametro e la indipendenza dal risultato di
misura. Se ci fosse dipendenza del risultato di misura in A dal
parametro lontano in B, cambiando il tipo di misurazione potrei
inviare segnali a distanza. La dipendenza probabilistica tra i risultati
di misura implica invece solo una sorta di non-separabilità tra due
sistemi posti in un certo stato, indipendentemente dalla distanza cui
si trovano (questo rende la non-separabilità diversa dalla gravità
nella meccanica newtoniana).
Capitolo 8
Il problema delle variabili nascoste
• Nel 1952 Bohm mostrò che un completamento
della meccanica quantistica non-relativistica, da
von Neumann ritenuto impossibile, era invece
realizzabile!
• Le variabile nascoste sono le posizioni delle
particelle, che non sono così nascoste, visto che
vengono rivelate da ogni misura.
• Le posizioni sono le uniche osservabili non
contestuali, mentre tutte le altre proprietà di un
microsistema dipendono dal contesto di
misurazione, proprio come aveva insegnato Bohr
Riassumiamo nel simbolo l tutte le variabili addizionali o
nascoste. Se A è un’osservabile del microsistema in oggetto,
assegnata l, la funzione A(l) deve avere un valore preciso
appartenente allo spettro discreto o continuo dell’operatore stesso
Tutto il contenuto empirico della meccanica quantistica è espresso
dalla conoscenza del valore medio <A> dell’osservabile A. Si
assume quindi che le variabili nascoste l e L siano distribuite
secondo una funzione a valori reali e positiva r(l) > 0, che è una
misura di probabilità (densità di probabilità) il cui integrale deve
dare 1. La probabilità che il valore l sia compreso tra l e dl è
r(l)dl
r(l)dl 1
A > Y A | Y A(l)r(l)dl
L
Ancora sul teorema di
impossibilità di von Neumann
La conoscenza della variabile nascosta l, che caratterizza in
modo completo il sistema, permetterebbe di conoscere il valore
A(l) di ogni osservabile A del sistema in funzione di l. A(l)
deve appartenere allo spettro dell’operatore autoaggiunto A che
la teoria gli associa
Le variabili sono però non accessibili in linea di principio e
quindi dobbiamo usare le probabilità, che diventano però
epistemiche, nello stesso identico senso in cui lo sono in
meccanica statistica classica. Si consideri un’osservabile che è
combinazione lineare di altre osservabili:
0 1
0 i
1 0
nx
n y
nz
s n
1 0
i 0
0 1
Più in generale, consideriamo un’osservabile C che è
combinazione lineare con coefficienti reali di altre due
osservabili C = aA +bB
In generale, vale anche in MQ come in meccanica classica che il valor medio
della combinazione lineare è la combinazione lineare dei valori medi dei
termini della combinazione
Y |C Y a Y | A Y b Y |B Y
Per il suo “no-go theorem” contro le variabili nascoste (contro l’idea che si
possano assegnare valori precisi a tutte le osservabili), von Neumann assunse
che un’eventuale teoria che completasse la MQ dovrebbe soddisfare le stesse
condizioni di linearità che soddisfano i valori medi anche per le variabili
nascoste. Ovvero, il suo teorema di impossibilità assume che in una teoria a
variabili nascoste in cui un’osservabile risulti combinazione lineare di altre, i
valori precisi o certi A(l), B(l), C(l) delle osservabili, che vengono assunti
quando si specificano le variabili nascoste, devono soddisfare le stesse
condizioni che valgono per i valori medi:
C(l) = aA(l) + bB(l)
*
Ma questa premessa è irragionevole se i valori A(l) devono
coincidere con gli autovalori. Nell’esempio dello spin, se
1
nx n y nz
sn (l) [s x (l) s y (l) s z (l)] / 3
3
Poichè le quantità certe si (l) devono coincidere con gli autovalori
degli osservabili relativi alle matrici di spin, essi devono valere +1
cosicché
s n (l ) k /
3
k 3,1,1,3
Ma poiché deve valere anche per la componente di spin lungo n che
sn (l) 1
si ha un risultato impossibile! Ne segue che la premessa * è
irragionevole e Bohm (1952) fornì un controesempio al teorema di von
Neumann
Immaginiamo una particella che si muove in una
dimensione. |Y(x)|2 rappresenta come sappiamo la densità
di probabilità che la particella sia nel punto x se se ne
misura la posizione. L’idea di Bohm è che se si prepara un
sistema in modo identico n volte, a causa del fatto che non
si può gestirlo in modo assoluto, ogni volta la sua
posizione sarà leggermente diversa: esiste quindi sempre
un intervallo di imprecisione nella posizione, che
corrisponde, nella visione tradizionale della teoria,
all’intervallo in cui si troverebbe la particella se si andasse
a misurarla. Per Bohm la posizione di ogni particella è
però sempre oggettivamente e realmente posseduta, e la
distribuzione delle posizioni delle n particelle individuali
riproduce la densità di probabilità associata dalla funzione
d’onda a un unico sistema la cui posizione prima della
misura è indefinita
La meccanica bohmiana
Non vi è modo di preparare un sistema in cui la posizione sia determinata in
modo assoluto, per cui l’osservatore non la può conoscere: di qui l’uso della
probabilità. Si prendono N particelle e si definiscono N campi di velocità. La
velocità di una particella i dipende in modo non locale e olistico dalla posizione di
tutte le altre e soddisfa a una equazione differenziale che lega le velocità alle
posizioni, e che insieme all’eq.deterministica di Schroedinger, reinstaura il
determinismo completo della MQ non relativistica
Y(r1 , r2 ,.....rn , t ) n 2
i
i Y(r1 , r2 ,...., rn , t ) V (r1 , r2 ,...., rn )Y(r1 , r2 ,.....rn , t ) 1
t
i 1 2M i
Prima si determina una soluzione Y(r1,r2,…rn,t) dell’equazione di
Schroedinger (qui sopra) rispetto a date condizioni iniziali e poi, in
funzione della soluzione ricavata, si definiscono N campi di velocità
vi
vi (r1 , r2 ,...rN , t )
dove
j (r1 , r2 ,...rN , t )
2
Y1 (r1 , r2 ,...rN , t )
f
f f f
i
j
z
x
y
z
ih
j (r1 , r2 ,...rN , t )
[Y (r1 , r2 ,...rN , t )i Y *1 (r1 , r2 ,...rN , t )
2 p2 M i
Y *1 (r1 , r2 ,...rN , t )i Y (r1 , r2 ,...rN , t )]
dri Y
v i ( x1 , x2 ,...xn , t ) x r , x r ..., x r
1 1 2 2
n n
dt
2
Date la funzione d’onda al tempo t =0 e le posizioni
iniziali ri(0), la soluzione delle due equazioni
differenziali 1 e 2 determinano a ogni istante curve o
traiettorie ben definite nello spazio-tempo. Prendiamo
l’equazione a una particella e poi moltiplichiamo per Y*
a sinistra entrambi i membri
Y (r , t )
i
i
[
V (r )]Y (r , t )
t
2m
Y * (r , t )
Y (r , t )
t
i
i
Y * (r , t )[ V (r )]Y (r , t )
2m
Facciamo lo stesso per la complessa coniugata
dell’equazione di Schroedinger, moltiplicandola per Y a
sinistra e poi sommiamo le due equazione così ottenute
Y * (r , t )
t
Y (r , t )
i
i
[
V (r )]Y * (r , t )
2m
Y * (r , t )
t
i
i
Y (r , t ) [ V (r )]Y * (r , t )
2m
(Y (r , t )Y * (r , t )) i
(Y (r , t ) * Y(r , t ) Y (r , t )Y * (r , t )
t
2m
i
div[
(Y (r , t ) * Y (r , t ) Y (r , t )Y * (r , t ))] divj (r , t )
2m
Se v(r,t) e r(r,t) sono velocità e densità di un fluido, le
equazioni di conservazione danno
r(r , t )
divj (r , t ) 0
t
j (r , t ) r(r , t )v(r , t )
Si osservi la corrispondenza formale tra densità del
fluido r e densità di probabilità |Y|2, che obbediscono
alla stessa equazione differenziale. Così r(r,0)
|Y(r,0|2 implica che la stessa eguaglianza vale al tempo
t.
L’insieme statistico che ha la distribuzione di posizioni
|Y(r,0|2 evolve dunque nell’insieme che corrisponde
all’evoluta dell’equazione di Schroedinger |Y(r,t|2
Derivazione delle equazioni di Bohm per una
particella
(1)
Cominciamo a scrivere l’equazione di Schroedinger (1) in forma
polare, scrivendo prima la funzione Y(r,t) in forma polare
(2)
Calcoliamo la derivata parziale rispetto al tempo (per la e, si applica
la chain rule, ovvero si deriva parzialmente la e rispetto a S e poi si
moltiplica per la parziale di S rispetto a t)
(3)
Per calcolare il laplaciano, calcoliamo prima il gradiente di Y
(4)
E poi applichiamo di nuovo l’operatore “del”, per ottenere
(5)
Sostituendo la 3 e la 5 nell’equazione di Schroedinger, si ha
A i S
2 2
A
i
2
i( A ) [ A (S ) (2AS A 2 S )] UA
t t
2m
2
(abbiamo diviso per il fattore esponenziale comune ai 2 membri)
Raccogliendo ora la parte reale e quella immaginaria della funzione
d’onda scritta in forma polare, si ottengono due equazioni:
(6)
Dividendo per A e raccogliendo i termini con S a sinistra, otteniamo
(7)
La parte immaginaria dà invece (dividendo per il fattore i):
(8)
Moltiplichiamo per
2A /
e riscriviamo
Trasformazioni ausiliarie
A2 f A
A
2A
t
A t
t
f A2
( A. A) A
A
A
A A
2A
t
t
t
t
A2 ( A. A) 2 AA
(9)
Eq. di Bohm
(10)
Come si vede immediatamente, nella (10), per
0
si ottiene l’equazione classica di Hamilton-Jacobi per il moto
di una particella in un potenziale U, con il momento p2= (S ) 2
Eq. HamiltonJacobi classica
Richiamo su Hamilton-Jacobi
In generale, passando da variabili qi e pi definite nello spazio delle fasi ad altre
variabili Qi e Pi l’equazione di Hamilton non è preservata. Però, se la
trasformazione in questione è canonica, ovvero, se la funzione generatrice S
obbedisce alle seguenti relazioni:
pi
S ( q, p, t )
S ( q, p, t )
S
; Qi
; H H ( q, p, t )
qi
Pi
t
allora le equazioni di Hamilton sono preservate. Se in più si ha che H=0,
allora le due eq. di Hamilton rispetto alla nuova funzione
H
H
Q i
0; Pi
0
Pi
Qi
forniscono due costanti del moto.
Se si ha che le pi in S = (qi ,pi , t) sono date da questa relazione
Allora l’annullarsi della nuova hamiltoniana H è equivalente alla
seguente condizione
che è appunto l’equazione di Hamilton Jacobi cercata
Nella (10),
2 2 A
Q
2m A
è il potenziale quantistico
Cosicché l’equazione quantistica di Hamilton-Jacobi è
S (S ) 2
U Q 0
t
2m
Mentre l’equazione del moto della particella è, ovviamente,
dv
m
(U ) (Q)
dt
Dove, a fianco di una forza classica, c’è una forza quantistica
(Q )
La particella è dunque guidata (e accelerata) dal campo quantistico!!!
A differenza di un campo classico, il campo quantistico non
può essere influenzato dalle particelle e non ha sorgenti
Moltiplicando il campo per una costante, la sua azione non
varia, perché A è sia a numeratore che a denominatore di Q:
2 2 A
Q
2m A
Ciò significa che l’effetto del potenziale quantistico dipende
solo dalla sua forma e non dalla sua intensità: un elettrone si
muove con la sua energia e il potenziale o l’onda lo guida e lo
dirige, come una macchinetta teleguidata
L’effetto del campo è altamente non-locale, cioè non dipende
dalla distanza, in un modo che è stato verificato
sperimentalmente
Il concetto di informazione attiva: qualcosa che ha poca energia
guida ciò che ha molta più energia e fa ciò in modo non meccanico!
Anche nel meccanismo di duplicazione del DNA, l’energia è data
dalla cellula, e dall’ambiente, ma la informazione attiva è data dalla
forma del DNA. La parte del DNA che non viene copiata è solo
potenzialmente attiva.
La capacità di compiere lavoro viene dalle particelle, e non si
origina nel campo; le prime potrebbero avere una struttura interna.
Poiché un sistema di fenditure diverso produce un campo Q
diverso, un esperimento quantistico e la meccanica quantistica sono
olistiche: detto semplicemente, il moto dell’elettrone non può essere
discusso astraendo da tutto il contesto sperimentale (Bohr)
Riprendiamo la forma polare della funzione d’onda
Y(r, t ) A(r, t )eiS /
Poiché |Y|2YY*, la probab. di trovare la particella =P=A2
A2
S
P
S
2
.( A
)0
.( P
)0
t
2m
t
2m
La prima a sinistra del segno di conseg. logica è la (9), la seconda
è l’equazione di continuità per la densità di probabilità P, ma il
ruolo fondamentale di A = |Y|2 non è quello di determinare la
probabilità di trovare un’osservabile con un certo autovalore se si
va a fare una misura, ma di definire il potenziale quantistico Q.
La P in questa interpretazione è epistemica, e dunque simile alla
meccanica statistica classica
I teoremi limitativi dopo von
Neumann: la contestualità delle
teorie
a
variabili
nascoste:
VD+NC+MQ = contraddizione
VD= ogni sistema quantistico ha tutti i valori
delle osservabili simultaneamente definiti
(definitezza
proprietà,
o
realismo)
NC ogni valore dell’osservabile di un
sistema non dipende da quali altri valori sono
misurati insieme ad esso (non contestualità)
Gleason e Kochen-Specker rimediano all’assunzione troppo
forte del teorema di additività di Von neumann fatta per
qualunque osservabile supponendo che la [5] di quel teorema
(vedi p. 52 e vedi * p. 195) valga solo per osservabili
compatibili, tesi che non è messa in discussione dai teorici
delle variabili nascoste.
Teorema di Gleason:In uno spazio di Hilbert di dimensione >
3, le uniche possibili misure di probabilità sono le misure
[7]
μ (Pα) = Tr(Pα W),
in cui Pα è un operatore di proiezione, W è l’operatore
statistico che rappresenta lo stato del sistema e Tr l’operatore
traccia.
“The Pα can be understood as representing yes-no observables, i.e. questions
concerning whether a QM system represented by a Hilbert space of dimension
greater than or equal to 3 has a property α or not, and every possible property α
is associated uniquely with a vector |α> in the Hilbert space -- so, the task is to
unambiguously assign probabilities to all vectors in the space. Now, the QM
measure μ is continuous, so Gleason's theorem in effect proves that every
probability assignment to all the possible properties in a three-dimensional
Hilbert space must be continuous, i.e. must map all vectors in the space
continuously into the interval [0, 1]. On the other hand, an HV theory (if
characterized by VD + NC) would imply that of every property we can say
whether the system has it or not. This yields a trivial probability function which
maps all the Pi to either 1 or 0, and, provided that values 1 and 0 both occur
(which follows trivially from interpreting the numbers as probabilities), this
function must clearly be discontinuous” (C. Held, The Kochen-Specker
Theorem, p. 4) (Redhead 1987, Incompleteness and non-locality in QM, p.28)
Bell nel 1966 produce un teorema contro le variabili
nascoste che poi critica mettendone in discussione una
premessa. Egli prova che mentre la funzione di
probabilità quantistica μ richiede che due vettori |α> and
|α′> mappati in 1 e 0 non possano essere arbitrariamente
vicini, perché devono avere una certa separazione
angolare, la funzione che assume come valori delle
variabili nascoste richiede invece che i due vettori siano
arbitrariamente vicini. La contraddizione si elimina
mettendo
in
discussione
una
premessa
di
noncontestualità: “it was tacitly assumed that
measurement of an observable must yield the same value
independently of what other measurements may be made
simultaneously” (Bell, 1987, p. 9).
In altre parole, malgrado Gleason supponga compatibilità
tra coppie di osservabili che entrano nella [5], è possibile
che la stessa osservabile V prenda valori diversi se
misurata con W o se misurata con Y, anche se V e W
sono tra loro compatibili e V e Y pure.
La differenza tra Kochen-Specker e i due teoremi che
abbiamo sommariamente esposto è che mentre i primi
assumono un continuum di osservabili, KS indeboliscono
questo assunto mostrando che persino con un numero
finito di osservabili discrete si ha incompatibilità tra NC
(noncontestualità), Value Definiteness e QM. Si rimuove
così una possibile obiezione contro il no-go theorem di
Gleason.
Formulazione del teorema KS
Sia H è uno spazio di Hilbert di dimensioni x > 3, contenente un
numero finito y di osservabili in un insieme M, definite da operatori
corrispondenti su H. Allora per specifici valori di x e di y, le due
assunzioni qui riportate sono contraddittorie:
(KS1) Definitezza di valori: tutti i membri y di M hanno valori
simultanei, ovvero per tre osservabili qualsiasi A B e C, v(A), v(B),
v(C) sono numeri reali simultaneamenti definiti;
(KS2) I valori delle osservabili obbediscono ai seguenti vincoli:
(a) Se A, B, C sono tutte compatibili e C=A+B, allora
v(C)= v(A) + v(B);
(a) If A, B, C sono tutti compatibili e C=AB, allora v(C)= v(A)v(B)
La regola della somma e quella del prodotto sono
conseguenze di un principio di composizione funzionale
chiamato FUNC, che a sua volta, come vedremo,
discende da un’ipotesi di non-contestualità.
Nel teorema originale di KS, x =3 e y = 117. Ci sono però
teorema più recenti, validi per x = 3 e y = 33 (Peres 1995,
pp.197-199) e Kernaghan (1994) per x = 4 e y =20,
quest’ultimo più debole degli altri due
Il teorema di Karnaghan (x=4 e y =20)
Come vedremo, dalla (KS2) si può derivare la seguente condizione
sugli operatori Pi , corrispondenti a quattro distinti autovalori q1, q2,
q3, q4 di un’osservabile Q su H4:
(VC1’) v(P1) + v(P2) + v(P3) + v(P4) = 1, dove
v(Pi) = 1 o 0 , per
i = 1, 2, 3, 4.
Passando a uno spazio di Hilbert con scalari nel campo reale (il
teorema vale lo stesso anche in questo caso, perché se
l’assegnazione di valori definiti è impossibili nello spazio di Hilbert
definito sui reali (R3), allora è impossibile su H3 definito sul
campo complesso), possiamo tradurre la condizione (VC’) nella
richiesta che in ogni quadrupla di raggi ortogonali in tale spazio
esattamente uno deve essere colorato in bianco - v(Pi) = 1 - e gli
altri tre in nero - v(Pi) = 0 - ciò che è impossibile
1,0,0,0 1,0,0,0
1,0,0,0
1,0,0,0 -1,1,1,1 -1,1,1,1
1,-1,1,1
1,1,-1,1 0,1,-1,0 0,0,1,-1
1,0,1,0
0,1,0,0 0,1,0,0
0,0,1,0
0,0,0,1 1,-1,1,1
1,1,-1,1 1,1,1,-1 1,0,0,-1 1,-1,0,0
0,1,0,1
0,0,1,0 0,0,1,1
0,1,0,1
0,1,1,0
0,1,1,0
1,1,-1,-1
1,1,-1,1
1,1,-1,1 1,0,1, 0
0,0,0,1 0,0,1,-1 0,1,0,-1 0,1,-1,0 1,1,1,-1 0,1,0,-1 1,0,0,-1
0,0,1,1
1,1,1,1
1,1,1,1
1,-1,0,0 1,-1,-1,1 1,1,-1,-1 1,-1,-1,1
Nella tabella, costituita da 44 elementi, ci sono 20 raggi distinti, perché 20 sono le
osservabili considerate. In ognuna delle 11 colonne ci sono 4 raggi ortogonali (x =
4= dimensioni dello spazio): ci sono dunque 44 elementi, alcuni dei quali sono
ripetuti 2 o 4 volte. Per specificare un raggio o una linea che passi per l’origine
basta dare le coordinate della retta che passa per l’origine (non specificata) e per il
punto. Per esempio, "1,0,0,0" denota l’asse x. Dato che il numero delle colonne è
dispari, e i quattro vettori di ogni colonna sono ortogonali, per la condizione VC1’ il
numero totale dei bianchi deve essere dispari (infatti in ogni insieme di vettori
ortogonali c’è solo un raggio colorato di bianco). D’altra parte, si vede che ogni
raggio è ripetuto nella tabella o 2 o 4 volte; poiché a causa della premessa di
noncontestualità, uno stesso raggio, anche se in colonne diverse, riceve sempre lo
stesso colore (valore), ne segue che ogni volta che uno di questi raggi in una
colonna è bianco (esattamente uno deve esserlo), dobbiamo colorare un numero
pari di raggi bianchi. Ne segue che il numero totali di raggi bianchi deve essere
pari, e quindi la contraddizione è provata!
L’idea del teorema di Kochen-Specker
L’idea del teorema, che presuppone uno spazio di Hilbert
di dimensioni x=3, è che, come prima, per ogni insieme di
triple ortogonali in H3, un raggio vale 1 e gli altri due 0 e
si pone dunque lo stesso problema di colorare due raggi di
nero e uno di bianco. Per ottenere queste condizioni, si
considera un arbitrario operatore Q, con autovettori |q1>,
|q2>, |q3>, e relativi autovalori distinti q1 q2 q3. Si
considerano 3 proiettori P1, P2, P3 che proiettano sui tre
autovettori di cui sopra e che sono ovviamente degli
osservabili “si-no”, dato che Pi corrisponde alla domanda
sperimentale: “il sistema ha il valore qi per l’osservabile
Q?”
Poiché i tre proiettori Pi sono per ipotesi mutualmente
compatibili, possiamo applicare ad essi la regola della
somma e del prodotto e derivare il seguente lemma, che ora
dimostriamo
(VC1) v(P1) + v(P2) + v(P3) = 1, dove v(Pi ) = 1 o 0,
i =1,2,3
(A) Pi2 = Pi (i proiettori Pi sono idempotenti);
(B) Se H è uno spazio di Hilbert di dimensione finita, e i
Pi sono operatori che proiettano su |qi>, dove gli
insiemi {|qi>} formano un base ortonormale di H,
allora Si Pi= I , ovvero i vari Pi formano ‘una
risoluzione dell’identità’).
Si consideri un arbitrario |Y>, un operatore non degenere Q con
autovettori |q1>, |q2>, |q3>, e relativi autovalori distinti q1 q2 q3. Si
considerino 3 proiettori P1, P2, P3 che proiettano sui tre autovettori di
cui sopra. Allora, per l’ortonormalità, si ha
[8]
P1 + P2 + P3 = I
Ora, poiché P1, P2, e P3 sono compatibili, dall’assunzione KS2 si ha
(a)(Regola della somma): v(P1) + v(P2) + v(P3) = v(I);
(b) Per la regola del prodotto, passiamo da Pi2 = PiPi a v(Pi)2 = v(Pi2);
per l’idempotenza, si ha v(Pi2) = v(Pi) v(Pi)2 = v(Pi) = 1 o 0
Sia R un osservabile tale che v(R) sia diverso da 0 nello stato |Y>.
Da questa assunzione e KS2 (b) (Product Rule):
v(R) = v(I R) = v(I) v(R). Ne segue allora che v(I) = 1 e per la regola
della somma
[9]
(VC1) v(P1) + v(P2) + v(P3) = 1
In cui v(Pi) = 1 or 0, for i = 1, 2, 3. Qed
Ghirardi si chiede (1997, p. 481): “tenuto conto delle
motivazioni che animano i proponenti delle teorie a variabili
nascoste, il riconoscimento dell’inevitabile contestualità di almeno
alcune osservabili non entra in conflitto con la pretesa
“oggettività” delle proprietà possedute da un sistema? Se il valore
di verità (cioè il fatto che essa risulti vera o falsa) dell’asserzione
“A assume il valore A(l)” dipende dal fatto che, per esempio, un
osservatore decida (a suo libero arbitrio) se misurare l’osservabile
B o l’osservabile C (entrambi compatibili con A ma incompatibili
tra loro)…in che senso l’asserzione in esame può ritenersi avere
un valore oggettivo?
La risposta a questa domanda è non solo che si possono sempre
trovare osservabili non contestuali, ma che il mondo quantistico è
fondamentalmente e irriducibilmente relazionale e privo di
proprietà e dunque di identità definite: come un personaggio
pirandelliano (uno nessuno e centomila), le proprietà che le
microentità assumono dipendono dal contesto sperimentale
Ovvero, se persino nella teoria massimamente “realistica” (e cioè
che assume quanta più definitezza di proprietà è possibile
assumere) l’indefinitezza deve essere riconosciuta, questa
indefinitezza fa parte dell’ontologia della natura, visto che è
comune anche all’interpretazione standard, nonché ad altre
interpretazioni che verranno discusse
Questo metodo di lettura o di interpretazione di una teoria fisica
guarda a ciò che è comune a diverse interpretazioni di una teoria
o a diverse teorie che hanno in comune lo stesso ambito
sperimentale. Così come si deve dire che la non-località è una
caratteristica della natura, si deve aggiungere che l’indefinitezza
delle proprietà, il loro carattere non intrinseco ma relazionale è
parte della natura, perché è comune a tutte le interpretazioni
Tale relazionalità, a causa dell’entanglement non locale, è essa
stessa non locale. Con uno slogan potremmo dire: ontologia della
QM e dunque della fisica=relazionismo olistico non locale
(RONL)
Capitolo 9
Il problema della macro-oggettivazione
1. Molte storie decoerenti
2. L’interpretazione modale
3. Il programma GRW
Le varie opzioni (vettore di
stato, osservabili, dinamica)
• Completezza o incompletezza vettore di stato
• Se il vettore è completo, si può assumere che
l’insieme è formalmente omogeneo ma
fisicamente disomogeneo (assunzioni sulle
osservabili, rottura della connessione autovettoreproprietà, molti mondi)
• Insieme formalmente omogeneo e fisicamente
omogeneo (due principi dell’evoluzione o una sola
dinamica)
0 F 0 [ cr r ] F 0 cr F r
misura
r
r
1) Nella teoria di Bohm, il postulato del collasso è
un’accurata approssimazione, nel senso che
trascurare l’effetto di uno dei due termini soppressi
può significare trascurare un effetto fisico reale sul
potenziale quantomeccanico: lo stato finale corretto
è quello di sovrapposizione scritto sopra
2) Tuttavia, il gatto nella teoria in questione è di fatto
vivo o morto, perché le posizioni delle particelle
nei due casi sono assai diverse: si usano le
equazioni irreversibili anche se quelle corrette sono
quelle reversibili.
Omogeneità o disomogeneità dei sistemi
nell’ipotesi di completezza di |Y>
• La completezza “formale” di |Y> non è
incompatibile con il fatto che, facendo opportune
assunzioni sulla misurabilità delle osservabili, si
abbia a che fare con sistemi fisicamente
disomogenei (ha senso parlare di completezza?)
• Supponiamo che non risulti possibile (o i linea di
principio o di fatto) misurare tutte le grandezze
fisiche che corrispondono a tutte gli operatori del
microsistema e che le sole quantità osservabili
dell’equazione precedente commutino tutte: allora
diventa impossibile distinguere uno stato puro da
una miscela statistica (si veda 8.7 Ghirardi)
• Se la non misurabilità di osservabili incompatibili è
dovuta a ragioni di principio, ne conseguirebbe che
l’energia iniziale del sistema dell’equazione di cui sopra
e quella finale non sarebbero misurabili, visto che la
situazione
iniziale
e
quella
finale
sono
macroscopicamente distinguibili e corrispondono ad
autovarietà distinte Inoltre, non si danno prescrizioni
precise su come individuare le osservabili compatibili,
perché non si dà distinzione precisa tra quantum e
classico.
• Allora la non misurabilità deve essere di fatto: visto per
es. il rapido accoppiarsi del sistema all’ambiente come
misurare tutte le correlazioni finali del microsistema
con tutto ciò che lo circonda, in modo da distinguere
miscela e stato puro?
• L’ultima soluzione è accettabile a fini pratici, e per gli
strumentalisti, ma l’approssimazione in questione è
diversa da quella richiesta dalla teoria di Bohm. Per
quest’ultima, l’indice è di fatto in una posizione
definita e l’approssimazione che ci porta ad usare una
miscela è giustificata, come è giustificato usare
approssimate equazioni irreversibili per predire che un
singolo gas si sta espandendo, malgrado il teorema di
ricorrenza di Poincaré ci dica che le eq. corrette sono
altre: non c’è contraddizione tra il fatto che le
equazioni corrette sono quelle reversibili con l’uso nel
presente di equazioni approssimate irreversibili
• Nel caso della teoria che limita di fatto le osservabili
misurabili, se in tempi di ricorrenza di Poincaré si
riuscisse a misurare sovrapposizioni macroscopiche,
avremmo che ora la teoria in questione è falsa
Il teorema di decomposizione biortogonale di un
sistema composto asserisce che lo stato Y di un
sistema composto da S e A può scriversi in un solo
modo come la combinazione lineare di stati
biortonormali. Indicati con pi gli autovalori comuni
ai due operatori statistici WS e WA ottenuti facendo
la traccia parziale su ciascuno dei due spazi
costituenti, si ha (tralasciando questioni legate alla
degenerazione)
Y S A i
pS i Ai
(S i , S j ) i , j
( Ai , A j ) i , j
H H 1 H 2 ...H N
1 M N H H M H N
Y S A (1,2,...N , t ) i p F S i (1,2,...M , t ) X ( M 1,...M N , t )
Se siamo interessati al sottosistema SM scrivendo lo stato
puro del sistema composto in forma biortogonale possiamo
affermare che le due parti F e X hanno proprietà definite,
anche se lo stato del sistema non è in un autostato
dell’osservabile. Questo è tipico dell’int. modale.Tali
proprietà dipendono però dal tipo di decomposizione
prescelta. Se si ha un protone, un neutrone e un elettrone
con i loro spin, si potrebbe essere interessati alle proprietà
del primo lasciando gli altri due insieme, o a quelle dei
primi due e all’ultimo separatamente considerato
• Se lo stato finale fosse descritto da una miscela
statistica, il confronto con la miscela ottenuta
tramite il procedimento di Dieks porterebbe a
risultati diversi, visto che quest’ultimo parte da
stati puri: l’interpretazione modale offre una
soluzione puramente formale al problema di
come siano possedute le proprietà
Molte storie decoerenti
Siano a, ble osservabili, mentre i loro autovalori
siano k(a), j(b); siano Pak(a) i proiettori associati
all’autovalore k(a). Una storia è costituita da una
successione di eventi, ovvero da una successione di istanti
temporali, t1, t2, ….tn e dal fatto che a quegli istanti certi
sistemi hanno certe proprietà. La probabilità P di una storia
è la probabilità che si siano succeduti certi eventi:
P[t N , , m(),..., t2 , b, j (b), t1 , a, k (a)]
Per un dato
dell’identità
a
P
k ( a ) I
k (a)
osservabile, vale
la
decomposizione
P a k ( a ) P a m ( a ) k ,m
P[t N , , m(),..., t2 , b, j (b), t1 , a, k (a)]
2
j
Pm( ) e iH (t N t N 1 ) / ...Pj (b) e iH (t2 t1 ) / Pka( a ) e iHt1 / Y(0).
La teoria non si riferisce a riduzioni ma interpreta le
probabilità di successioni di eventi, o di date storie. Si
prenda ora un’osservabile a a un istante dato t. Prendiamo
ora la famiglia di tutte le storie a , t che affermano che
a t il sistema in oggetto ha uno dei suoi possibili autovalori
k
La k-esima storia della famiglia è quella che afferma che a t vale
k(a). Sommando su tutti i valori k(a) di questa osservabile, si ha che
la probabilità è 1, ma considerando altre osservabili b a quel tempo,
la somma per le probabilità associate a tutte le storie date dall’unione
delle due famiglie sarebbe >1.
Limitandosi a famiglie di storie alternative decoerenti, si
evitano problemi con la probabilità. Si consideri il
seguente funzionale di decoerenza
(Y (0), e iHt1 / Pra( a ) e iH (t2 t1 ) / Psb(b) ...e iH (t N t N 1 ) / Pm( )
Pm( ) e iH (t N t N 1 ) / ...Pj j(b) e iH (t2 t1 ) / Pka( a ) e iHt1 / Y (0))
Supponiamo che questa espressione risulti nulla ogni volta che
almeno uno tra gli indici corrispondenti è diverso (r da k, s da j,
etc.), allora l’insieme delle probabilità associate alla famiglia è
consistente (famiglia decoerente). Per l’espressione di cui sopra,
si tenga conto che
PYa (t ) F (Ya (t ), F)Ya (t ) (e iHt / Ya (0), F)e iHt / Ya (0)
e iHt / Ya (0)( Ya (0), e iHt / F) e iHt / PYa (t ) e iHt / F
GRW: l’evoluzione del vettore di stato è
deterministica, la riduzione del pacchetto è
non-lineare e stocastica
“Un corpo macroscopico deve avere sempre una
posizione quasi perfettamente definita in ogni descizione
oggettiva del mondo reale” (Einstein)
Consideriamo una sola particella e una funzione di
localizzazione Lr* (r) una gaussiana di ampiezza 1/a1/2
centrata attorno al valore r*
a
Lr* (r )
p
3/ 4
e
a
( r r *)
2
N è un fattore di normalizzazione; la localizzazione
fa sì che tutti i valori di r in Y(r) che distano da r* più di
1/a1/2 siano posti = 0
Y (r ) Yr* (r ) NLr* (r )Y (r )
Sia
Fr Lr*Y(r)
per GRW la densità di probabilità che una localizzazione avvenga
in r* è data da |Fr|2; cioè le localizzazioni spontanee avvengono in
modo da rispettare la prescrizione probabilistica della teoria
standard. Ovvero la localizzazione può avvenire attorno a un
qualsiasi punto r* tale che la particella abbia secondo la teoria
standard una prob. non nulla di venir trovata in un volume 1/a3/2
Se l è la frequenza media, la probabilità che si
verifichi un processo di localizzazione nell’intervallo t,
data da lt, è irriducibile (stocasticità): non c’è una
causa per cui si verifica in uno piuttosto che in un altro
istante.
Dato che la probabilità dipende da |Fr|2 , il processo
non è lineare nel vettore di stato
l 10 16 sec 1
1 / a 10 5
Due nuove
costanti di natura
1
Y (r )
[Yr1 (r ) Yr 2 (r )]
2
I due stati di posizione (per una particella) sono localizzati
attorno ai due punti r1 e r2, la cui distanza è assai
maggiore di (1/a)1/2 Poiché per come è costruito il
modello, la localizzazione può avvenire solo attorno a uno
dei due punti, ciò che costringe il sistema in
sovrapposizione a localizzarsi attorno a uno dei due punti
con probabilità 1/2
Appendice 1
Valor medio di un operatore, operatore statistico o di densità
Supponiamo al solito di avere un’osservabile B, per semplicità non
degenere e dallo spettro discreto, e tale che Bvk=bkvk e supponiamo
anche che Y non sia un autostato dell’osservabile. Allora Y si può
espandere nella base ortonormale costituita dagli autovettori vj
c j v j c j v j P( B b j | ) | c j |2
j
Ricordando la linearità e l’antilinearità del prodotto scalare e
l’ortonormalità della base vk si calcola il valor medio <B> di B
B B ck vk Bc j v j c *k c j vk b j v j c *k c j b j vk v j
kj
kj
c*
k
Sandwich di B
kj
c j b j kj k j
kj
| c |
j
2
bj
Media degli esiti di
misura pesata con la
loro probabilità
Nel caso di un dado, la media degli esiti pesata con la loro probabilità
(la distribuzione) è
(1/6)1+(1/6)2+ (1/6)3+(1/6)4+ (1/6)5+(1/6)6=21/6 = 3,5
Calcoliamo ora il valor medio di un proiettore associato a
un’autospazio di un’osservabile con la regola del “sandwich”, e
mostriamo che esso è uguale alla probabilità di ottenere il relativo
autovalore in un processo di misura
P
B
j
| [P j ] | P j P j P j
B
2
B
B
B
2
Consideriamo ora un operatore hermitiano A su uno spazio di
Hilbert H. Si dice che A è positivo se, per ogni v di H,
v Av 0
Esercizio: Dimostrare che dalla condizione nel box blu, omettendo l’hermiticità di
A, segue che A è hermitiano e che i suoi autovalori sono positivi
Prendiamo ora una base di v ortonormali e ridefiniamo la funzione
traccia di A, Tr(A)
Tr (A) def
v
i
Avi
i
Si noti che scrivendo
l’ortonormalità di v si ha
v
i
i
l’equazione
agli
autovalori,
per
Avi vi ai vi ai ii ai
i
i
i
che coincide con la definizione più nota, ovvero con la somma
di elementi diagonali in cui si può mettere la matrice di A
quando A è hermitiano; come si vede, gli elementi diagonali
sono gli autovalori di A. Inoltre, siccome A è hermitiano, la
traccia di A è un numero reale.
Ovviamente la traccia di un operatore può divergere, cioè dare
somma infinita. Diciamo ora che un operatore appartiene alla classe
traccia se (i) A è positivo e (ii) se la sua traccia è finita, cioè
(i)
(ii)
v Av 0
v
Avi
i
A è di classe traccia
i
Prendiamo ora un proiettore P su un raggio di H (che è un
sottospazio monodimensionale di H) e sia vi il vettore che giace
nel raggio in questione. Allora si ha Pvi=vi e Pvj=0 se i j
Tr (P) vi Pvi i j vi vi 1
i
Siccome P è di classe traccia e la sua traccia =1, allora è detto operatore statistico
Esercizi: dimostrare le seguenti tre proprietà della traccia: (i) Tr(aA) = a Tr(A) ; (ii)
Tr(A+B) = Tr(A)+Tr(B) (iii) Tr(A) dipende solo da A e non dalla base prescelta
Svolgimento di (ii). (i) è stato svolto in classe
vi Avi vi ai vi ; vi Bvi vi bi vi
Tr ( A B) vi (A B)vi vi Avi Bvi vi Avi vi Bvi Tr ( A) Tr (B)
i
i
i
i
Svolgimento di (iii); Sia Tr’(A) la traccia di A in base v’=Si ci vi con v’ base ortonormale
esprimibile come combinazione lineare della base ortonormale originale vi
Tr ( A) vi Avi ai vi vi ai
i
i
i
Tr ' ( A) v'i Av'i ci vi Aci vi ci vi ci Avi
i
a
i
i
ci vi ci vi ci vi orton.
i
i
a
i
i
Si ha quindi Tr(A)=Tr’(A).QED
Operatore di densità (statistico)
W è detto operatore di densità o operatore statistico o matrice di
densità se
(i) W è un operatore di classe traccia (e quindi W è positivo e la sua
traccia è finita) e inoltre
(ii) è di traccia unitaria Tr(W)= 1.
Abbiamo visto nella pagina precedente che ogni operatore di
proiezione P che proietti su un raggio è un operatore statistico o di
densità (infatti si ha Tr(P) =1). Dimostrare che se [Pi] è una famiglia
di proiettori che operano su raggi di H, allora per la (i) e la (ii) di
questa pagina, si ha che
((ai )ai 0 ai 1 W ai Pi ) W è un operatore di densità
i
i
Dimostrazione.
La condizione di positività è soddisfatta quando per ogni v in H, si
ha
v Wv 0
Infatti se l’equazione agli autovalori è Wvi=aivi, con vi base
ortonormale, allora ogni v in H si esprime come combinazione
lineare di vi e quindi si ha
vi Wvi ai vi vi ai 0
con fattori che moltiplicano le a per il modulo quadro c*c dei
coefficienti dell’espansione di v=Sicivi e che dunque non influiscono
sulla positività del prodotto scalare
v Wv 0
La condizione di finitezza della traccia è soddisfatta perché la
traccia di W è unitaria e quindi a fortiori finita:-(i) e (ii) qui sotto si rif.
alle proprietà della traccia trattate negli esercizi della p.61-
Tr ( W) Tr ( ai Pi ) (ii) Tr (ai Pi ) (i )
i
i
a Tr (P ) a
i
i
i
i
i
1
Si può dimostrare che è sempre possibile decomporre un operatore di densità W in
una somma pesata di proiettori Si aiPi, anche se la decomposizione di W non è
unica (vedi sez. 5.2 R. I. G. Hughes S.I. of QM). Ogni operatore di densità che
non sia esso stesso un proiettore può esprimersi in un numero infinito di modi
come somma pesata di proiettori su raggi (varietà monodimensionali dello spazio
di Hilbert)
0
1
s
sx
y
1
0
0
i
1
0
s
z 0 1
i
0
I 1 0
0 1
Date queste quattro matrici su C2 e un operatore hermitiano A su C2 mostrare che
(i)
Esistono quattro numeri reali r1, r2,r3, r4 tali che A= r1sx+ r1sy+r3sz+ r4I
(ii) Se A è un operatore di densità, allora r4=1/4
(iii) Se A è di proiezione, allora r4=1/2, e (r1)2 +(r2)2 + (r3)2= ¼ (per idempotenza).
Allora scrivendo r2 r1 etc.
(iv) Se A è un operatore di proiezione, si può scrivere nella forma
A=1/2(r1sx + r2sy +r3sz +I) con (r1)2 +(r2)2 + (r3)2 =1
Abbiamo visto che se si considera l’operatore di proiezione PY
sulla varietà monodimensionale individuata da Y l’operatore PY è
di classe traccia con traccia unitaria. Se prendiamo un’osservabile
B il cui operatore B sia limitato (ovvero c’è un numero reale b
tale che per ogni v di H si ha |Bv| < b|v|), allora PY B è di classe
traccia, e la sua traccia è il valor medio di B. Infatti, possiamo
trovare una base ortonormale il cui primo elemento f1 = Y mentre
gli altri elementi fk sono ad esso ortogonali: se supponiamo che
PY f1 Y e PY fk = 0 per k diverso da 1, si ha (Ghirardi, 387):
Tr (PY B) i PY Bi idem. i P 2 Y Bi hermit. PY i PY Bi
i
i
i
PY 1 Y Y PY BY herm. PY Y BY Y |B Y B >
Il valor medio di un operatore limitato B è la traccia del prodotto
dell’operatore per il proiettore sulla varietà generata dallo stato Y
SCARTO QUADRATICO MEDIO
Definiamo ora lo scarto quadratico medio A (detto anche
secondo momento della distribuzione) come la radice quadrata
della media pesata dei quadrati degli scarti dalla media. Se pi è la
probabilità di ottenere l’esito ai, la quantità A ci permette di dire
che la maggior parte degli esiti sono concentrati nell’intervallo
[<A> - A, <A> + A]. Per esempio, se <A> = A =1/2
possiamo solo dire che la frazione di pollo che ogni italiano
mangia sta tra 0 = <A> - A e 1 = <A> + A, mentre se
A1/100 e <A> =1/2, allora quasi tutti gli italiani mangiano
mezzo pollo a testa (Ghirardi p. 388)
2
ΔA pi (ai A >) ; A > pi ai
i
i
Data un’osservabile B e il relativo operatore autoaggiunto B, si ha
(B)
2
| (B - B >) 2
Assumendo infatti che YSi ci fi ; e che B fi=bi fi
| (B - B >) 2 ck k (B - B >) 2 c j j
c
kj
k
kj
c
kj
* c j k (B - B >) 2 j ck * c j k (b j - B >) 2 j
kj
k
* c j (b j - B >) k j ck * ck (b j - B >) c j (b j - B >) 2
2
2
2
j
j
Ovvero il valor medio dell’operatore (B - <B>)2 detto anche
dispersione, è la media pesata con la probabilità |cj|2 del quadrato
dello scarto tra l’esisto bj e il valor medio di B.
Si noti che poiché B è hermitiano, e <B> =|ci |2 bi è reale, anche
l’operatore (B - <B>)2 è simmetrico, cosicché
(B)2 Y ( B B >) 2 | Y ( B B >)Y ( B B >)Y
( B B >)Y (B) ( B B >)Y
2
Se un sistema scelto a caso da un insieme quantisticamente non
omogeneo (miscela) E in cui una percentuale di sistemi Ea è nello
stato puro Ya con probabilità pa= Na/SaNa si ha, sommando su
tutte le opzioni possibili Ea e moltiplicando per il valor medio di
B relativamente allo stato a considerato
y 1 i y
1 i
1
1 i 1 1 i
[(1 i )(1 i ) (1 i )(1 i )] 1 i
4 1 i
Notiamo ora che se A è di classe traccia e B è limitato, si ha che AB e BA sono
entrambi di classe traccia e Tr(AB) = Tr (BA).
Sia Pv il proiettore che proietta sul raggio contenente un vettore normalizzato v e
sia Q un qualunque proiettore sullo spazio H. Sia pv(A,) la probabilità che
l’osservabile A sia in relativamente allo stato v. Se [vi] è una base normalizzata
di H che contiene v, allora Pvv=1 e Pvi=0 se vi è diverso da v
Tr (PvQ) Tr (QPv ) vi QPv vi
i
v Qv Q PA v PA v pv ( A, )
pv ( A, ) Tr (QPv ) Tr (Pv PA )
Se rappresentiamo lo stato puro con Pv piuttosto che con il vettore v, e con PA il
proiettore che proietta sul sottospazio che rappresenta la domanda sperimentale
“A è in ”?, allora pv(A,) è la traccia del prodotto tra lo stato puro Pv e il
proiettore PA . Sia L l’insieme dei sottospazi di H. Allora per ogni L in H, con il
corrispondente PL, mP(L)Tr(PvPL) è una misura di probabilità e le somme pesate
Siaimi sono ancora misure di probabilità, purché valga ai >0 e Siai=1.
Ora si consideri un operatore statistico W=SiaiPi con i proiettori Pi
che proiettano su raggi di H, a ciascuno dei quali corrisponde una
misura di probabilità mi. Allora per ogni sottospazio L e ogni
proiettore PL si ha
Tr ( WPL ) Tr[( ai Pi )PL ] aiTr (Pi PL ) ai mi ( L)
i
i
i
All’operatore W corrisponde così la misura di probabilità mW= Si ai mi
sull’insieme di sottospazi di H, a patto che per ogni ai , si abbia ai >0 e
Siai=1. Rappresentando con W lo stato del sistema, generalizziamo
l’algoritmico probabilistico della teoria scrivendo
pW ( A, ) Tr (WPA )
pv ( A, ) Tr ( Pv PA )
se W=stato puro Pv
questa relazione si
riduce al già visto