CURVE E
INTEGRALI
CURVILINEI
IN R2 E R3
Argomenti della lezione
Curve e loro
lunghezza
Integrali curvilinei.
CURVE E LORO
LUNGHEZZA
Abbiamo già accennato alla nozione
di curva o arco di curva continua.
Saremo ora un po’ più completi.
Un’applicazione f: I Rm , dove I è
un intervallo di R e m = 2 o 3, si dice
una curva continua se f è continua.
Diremo che la curva è regolare se
la funzione f è derivabile su I e se la
norma del vettore derivata non è
nulla in alcun punto di I.
D’ora in avanti useremo la lettera
per indicare una curva. Dunque,
è una curva regolare se (t) è
continua e |’(t)| > 0 per ogni t I.
(I) si dice il sostegno della curva.
Dunque la nozione di curva o
cammino è una nozione non solo
geometrica, ma anche cinematica.
Cioè teniamo conto della legge oraria
con la quale si percorre un certo
cammino.
Due curve o cammini possono
avere lo stesso sostegno, ma essere
diverse:
1(t) = (cos t, sen t)T, t I = [0,2π]
e
2(t) = (cos2t, sen2t)T, t I = [0,2π]
hanno lo stesso sostegno, la
circonferenza di centro l’origine e
raggio 1, ma la seconda è percorsa
due volte (a velocità doppia) nello
stesso tempo.
Una curva si dice chiusa se, detto
I = [a,b], (a) = (b); è detta
semplice se da t1≠ t2 segue
(t1) ≠ (t2) a meno che t1 e t2 non
siano a e b. La restrizione di una
curva ad un sottointervallo J di I si
dice un arco di curva. Due archi sono
consecutivi se sono esprimibili come
due archi di curva definiti su intervalli
con un estremo in comune.
1 e 2 sono consecutivi se 1 è definito
su [a,c] e 2 su [c,b] (o si possono
riparametrizzare in modo che ciò
accada) e 1(c) = 2(c).
1(a)
1
1(c) = 2(c)
2
2(b)
Una curva è generalmente regolare
se esiste una decomposizione di I
in un numero finito di punti
t0 = a < t1 < .. < tn = b tale che la
restrizione a ogni sottointervallo
[tk-1, tk] è regolare.
Diremo che due curve 1(t) e 2(t)
definite sugli intervalli I1 e I2
rispettivamente, sono equivalenti
se esiste un’applicazione h: I1 I2
tale che: (1) h(I1) = I2 ; (2) h è di
classe C1(I) e h’(t) > 0; (3) 1= 2 h.
Due curve equivalenti si dice che
differiscono per la rappresentazione
parametrica. Ogni intervallo ha due
versi naturali d’orientazione e così
ogni curva. Se : [a,b] Rm è una
curva assegnata - : [-b,-a] Rm è
la curva orientata in verso opposto.
Fra i vari tipi di curve considereremo,
in particolare, i segmenti di retta
congiungenti due punti x e y di Rm.
(t) = (x1 + (y1 - x1)t, x2 + (y2 - x2)t)T,
t I = [0,1], se m = 2.
Diciamo ora che cosa intendiamo per
lunghezza di una curva.
Data : [a,b] Rm , consideriamo la
decomposizione = {t0 = a < t1 < ..
< tn = b} di [a,b]. Consideriamo la
poligonale P data dall’unione dei
segmenti di retta congiungenti i
punti (t0) = (a) e (t1); (t1) e (t2);
… ; (tn-1) e (tn) = (b).
La lunghezza della poligonale P è
data da
n
l(P) = (tk ) - (t k -1 )
k
=1
Nel caso m = 3, osserviamo che
3
| (t k ) - (t k -1 )| = (xi (tk ) - xi (t k ))2
-1
i
=1
Diremo lunghezza della curva l’
estremo superiore delle lunghezze
delle poligonali inscritte alla curva
stessa se tale estremo è finito. In
tale caso la curva si dice rettificabile
l( ) = sup{l(P) : P dedotta da }
100
80
60
-8
-6
40
-4
-2
20
0
2
0
-4
-2
4
0
2
4
6
8
6
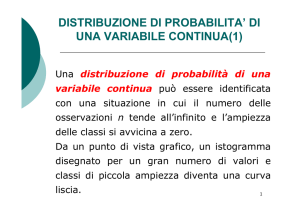
La figura precedente rappresenta una
curva di R3 e una poligonale ad essa
inscritta.
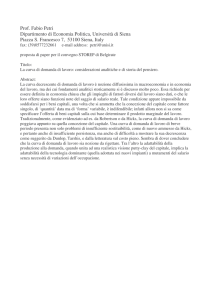
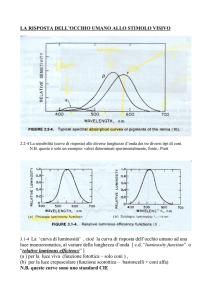
Può accadere che sia l( )= +∞ anche
per curve aventi sostegno limitato
in R3.
0 se t = 0,
Se y(t) =
tsen(1/t) se t≠ 0
Allora (t)=(t,y(t))T è un esempio
in cui l( )= +∞.
Il seno del topologo
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
x
-0.1
-0.2
0.4
0.5
Si può dimostrare che se = 1 + 2
ossia se l’arco è ottenuto dall’unione
degli archi consecutivi 1 e 2 , allora
l() = l(1) + l(2). Inoltre la
lunghezza non dipende dalla
rappresentazione parametrica.
Per trattare in modo preciso il
problema della lunghezza delle curve
e, in generale, l’integrale di funzioni
a valori vettoriali, conviene ricordare
che l’integrale di Riemann si può
presentare come limite di somme
(essendo la nozione di limite intesa in
modo opportuno). Precisamente,
accanto alla somme integrali inferiori
e superiori si possono considerare le
somme che diremo di Riemann
fa m(Ia ), la fa La
a
Si può dimostrare che f: I R è Rintegrabile se e solo se ,
tale che se diam() < allora
| I fdm - fa m(Ia )|<
a
Questo fatto si esprime dicendo che
lim fa m(Ia ) = I fdm
diam( )
a
0
Vale un risultato più generale, che
ci sarà utile nel calcolo della
lunghezza degli archi di curva
generalmente regolari
Supponiamo che, in corrispondenza
ad ogni multi indice a sia dato un
numero a in modo da essere
uniformemente limitato:
, tale che se diam() <
allora |a| < . Allora si ha
lim (fa + a )m(Ia ) = I fdm
diam( ) 0 a
“Principio di Duhamel”
Teorema
(Rettificazione delle curve regolari)
Se : [a,b] Rm è regolare, allora
b
l( ) = a | (t)| dt
Infatti ogni singolo lato della
poligonale misura
3
| (t k ) - (t k -1 )| = (xi (tk ) - xi (t k ))2
-1
i
=1
=
3
2
2
[
x
(
)]
(t
t
)
i t ik
k - k -1
i =1
3
2 +
[
x
(
)]
+ik)(tk - t k -1 )
= ( i i t k
=1
Ciò vale per l’uniforme continuità di
xk’(t) su [a,b], avendo tenuto conto
del teorema di Lagrange su ogni
intervallo [tk-1,tk].
Allora, per il principio di Duhamel:
n
3
=1
=1
2
(
)
lim
(
x
(t
)
l = diam( ) 0 i ik + ik )(t k - t k -1) =
k
i
b
= | (t) | dt
a
Una formula analoga vale per le
curve generalmente regolari
Esempi
1) Lunghezza dell’arco di
circonferenza: x = r cos t,
y = r sen t ;
s() = ∫√(x’2 + y’2) du = r ,
0
0≤ ≤ 2π
2) Lunghezza dell’arco di elica
cilindrica: x = r cos t,
y = r sen t, z = p t;
t
s(t) = (x 2 (u) + y 2 (u) + z 2 (u) du =
0
t
2
2
2
2
(r
p
)
dt
r
p
t
+
=
+
0
Se la curva è data in forma
cartesiana y = f(x), con f e f’
continue
x
s(x) = ∫√(1 + f’2(t))dt
a
La lunghezza d’arco è un
parametro molto conveniente per
la rappresentazione delle curve
Infatti
ds
=
dt
x 2 (t) + y 2 (t) + z 2 (t)
e quindi, poiché
dx dx dt dy dy dt dz dz dt
=
,
=
,
=
ds dt ds ds dt ds ds dt ds
x 2 (s) + y 2 (s) + z 2 (s) = 1
Cioè ’(s) è il versore tangente alla
curva nel punto di coordinata
lunghezza d’arco s.
INTEGRALI
CURVILINEI.
Se : I = [a,b] Rm è una curva
regolare, f: A Rm R è una
funzione continua definita su un
aperto A che contiene il sostegno
della curva e w(t): I R è una
funzione di classe C1(I), definiremo
b
fdw = f (x(t), y(t), z(t))w (t)dt
a
fdw
si dice l’integrale curvilineo esteso
alla curva di f rispetto al peso w.
In particolare
b
fds = a f (x(t), y(t), z(t)) | (t) | dt
b
fdx = f (x(t), y(t), z(t))x (t)dt
a
ed espressioni simili in dy e dz
Si definiranno anche
(f1dx + f2 dy + f3dz) = f1dx + f2dy + f3dz
e
b
f , d = a f ( (t )), (t) dt
dove f = (f1,f2,f3)T
L’integrale di linea
b
f , d = a f ( (t )), (t) dt
permette di calcolare il lavoro
di una forza f, lungo un cammino
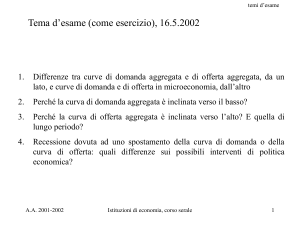
Invece l’integrale
b
fds = a f (x(t), y(t), z(t)) | (t) | dt
permette di calcolare l’area del
cilindro delimitato dalla curva
sul piano x y e dalla superficie
z = f(x,y)
z = f(x,y)
Si verifica facilmente che l’integrale
curvilineo è lineare rispetto alla
funzione f e al peso w; che cambia
segno invertendo il verso del
cammino e che è additivo su archi
consecutivi
Esempi
1) Si calcoli l’area del cilindro
delimitato da f(x,y) = y2 e dalla
semicirconferenza x = cos t,
y = sen t, π ≤ t ≤ 2π (π/2)
2) Si calcoli il lavoro
b
f , d = a f ( (t )), (t) dt
dove f(x,y) = (x exp(y) +log x,
arctg y + x2/2 exp(y) )T per x > 0
e (t) = (2 + sen t, t)T per 0 ≤
t ≤ 2π (0)