Percezione della profondità
Percezione
z
Due aspetti del problema
1.
2.
Percezione della Profondità
z
Ricostruire la 3a dimensione
z
z
Perché la percezione della
profondità è difficile?
Localizzare gli oggetti nello spazio (percezione della
distanza e dello spazio)
Percepire la corporeità e il rilievo di un oggetto (percezione
del volume)
Il mondo fisico è tridimensionale ma la luce che si riflette
dagli oggetti nel mondo si proietta su un’immagine
bidimensionale sulla retina
In qualche modo dobbiamo usare l’informazione
nell’immagine bidimensionale per recuperare o ricostruire
un percetto 3dimensionale.
Indici extraretinici/oculomotori
z
Funzionano solo per distanze corte: Fissando
su qualcosa lontano più di 5 metri gli occhi
guardano diritti con una lente piatta
z
z
Vergenza ("convergenza") degli occhi varia
(crociata o non crociata) a seconda che fissiate
su oggetti vicini o lontani.
Accomodazione Il livello di accomodazione che
Accomodazione.
l’occhio (lente) attua per focalizzare su un oggetto
varia con la profondità.
1
Vergenza
z
Angolo formato dagli
occhi relativo al
centro della testa
Convergiamo gli occhi
quando guardiamo ad
oggetti vicini
z Li divergiamo quando
guardiamo oggetti lontani
Vergenza
z
z
z
z
L’angolo tra le linee di mira dei due occhi
di
dipende
d dalla
d ll distanza
di t
dell’oggetto
d ll’
tt
Il sistema visivo utilizza il segnale afferente
(feedback) originato dai tensorecettori dei
muscoli oculari per stimare la distanza
dell’oggetto. Oltre i 6 metri gli occhi sono
paralleli
NB Osservate la punta del naso per rendervi
conto del segnale di tensione originato dalla
vergenza
Accomodazione
z
La lente si gonfia
quando mettiamo a
fuoco un oggetto
vicino
2
Accomodazione
z
Indici monoculari
I muscoli ciliari si contraggono per far rilassare il
cristallino
i t lli e permettergli
tt li di assumere una fforma
sferica. Quando i muscoli ciliari sono tesi
sentiamo una sensazione si sforzo. Siamo in
grado di utilizzare il segnale afferente sullo stato
di tensione dei muscoli ciliari (feedback) come
un indice grossolano di profondità. A partire da 6
metri i muscoli ciliari sono perfettamente rilassati
(accomodazione all’infinito del cristallino).
z
z
z
Prospettiva lineare
z
Linee parallele di fronte all’osservatore convergono
mano a mano che si allontanano verso l’orizzonte
l orizzonte.
Nessuno degli indici fisiologici (monoculari o
binoculari) è efficace quando guardiamo un dipinto
Indici pittorici: devono essere appresi
z Prospettiva lineare
z Occlusione
z Sfuocamento atmosferico
z Ombre e contorni
z Altezza nel campo visivo
z Dimensione (relativa e familiare)
Indici di movimento
z Parallasse del movimento
Prospettiva lineare
z
Linee parallele nel mondo reale convergono in un
disegno.
disegno
z
Più grande la distanza, più grande la convergenza.
z
All’infinito le linee si incontrano in un punto
(vanishing point).
3
Prospettiva lineare e arte
Prospettiva lineare e arte
Prospettiva lineare e arte
Prospettiva lineare e arte
4
Prospettiva lineare
z
z
La rappresentazione prospettica è ottimale solo
per un punto
t di vista
i t anche
h se il sistema
i t
compensa eventuali spostamenti da questo punto
di vista ottimale
Possiamo renderci conto di questo fatto
considerando un’immagine nell’immagine (pdv
dell’osservatore
dell
osservatore e pdv implicito nell
nell’immagine)
immagine).
Solo scostamenti dal pdv ottimale dell’osservatore
sono compensati.
Occlusione
Oggetti di fronte ad
altri
lt i oggetti
tti sono
ritenuti più vicini –
dato il vincolo che
gli oggetti non siano
trasparenti
Occlusione
z
z
z
z
Oggetti vicini bloccano parzialmente la vista di
oggetti più lontani.
lontani
L’occlusione porta a una percezione della profondità
(vediamo gli oggetti occludenti come più vicini
dell’oggetto occluso).
L’occlusione ci permette di completare e riconoscere
gli oggetti.
L’
L’occlusione
l i
è strettamente
t tt
t correlata
l t ad
d altri
lt i
fenomeni percettivi come la trasparenza e i contorni
illusori.
5
Occlusione
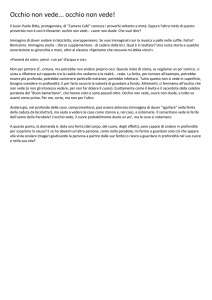
L’occlusione aiuta la percezione
z
Informazione
monoculare identica
z
Percezione
binoculare diversa
(Nakayama, Shimojo, e Silverman, 1989)
L’occlusione aiuta la percezione
Occlusione e trasparenza
z
L’introduzione dell’occlusione cambia la
percezione dell’oggetto
6
Occlusione e contorni illusori
z
Sfuocamento atmosferico
Si completano i contorni illusori più in fretta di quelli occlusi
(Ringach and Shapley , 1996)
Prospettiva aerea
z
z
z
Prospettiva aerea
Oggetti più lontani sono percepiti meno chiaramente
che oggetti più vicini
vicini.
La luce interagisce con l’ambiente e più a lungo
deve viaggiare più è probabile che interferisca in
qualche modo con la materia.
Cambiamento del colore in funzione della distanza (i
colori diventano meno saturi e virano al blu per
ll’umidità
umidità dell’aria)
dell aria)
7
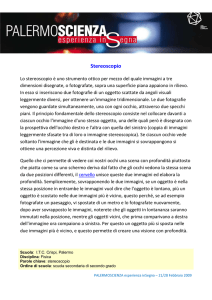
Gradiente di dimensione
Gradienti di tessitura
La dimensione di un
immagine dipende sia
dalla dimensione
dell’oggetto che dalla
sua distanza
dall’osservatore.
Questo è ovvio in
particolar modo q
p
quando
si guarda una
distribuzione regolare e
ripetitiva (gradiente di
tessitura).
z
La tessitura è più densa in un oggetto lontano che in
un identico oggetto vicino
vicino.
z
Se non c’è variazione nella densità della tessitura,
nessuna profondità viene percepita.
z
Un cambio brusco nella tessitura implica una
discontinuità di profondità (un angolo brusco).
Gradienti di tessitura
Gradienti di tessitura
8
Altezza nel campo visivo
zOggetti
a distanze
diverse proiettano a
diverse altezze sulla
retina.
zEuclide: grandezza
percepita dipende
dall’angolo ottico sotteso
dall oggetto
dall’oggetto
z
Indizi pittorici
z
Grandezza familiare
z
z
In assenza di altre informazioni la conoscenza
delle dimensioni normali di un oggetto tende a
influenzare la distanza a cui l’oggetto appare (un
elefante in miniatura è un elefante lontano)
Camera di Ames. Conflitto tra grandezza familiare
e prospettiva in visione monoculare
Vero solo per oggetti
alla stessa distanza
Indizi pittorici: Grandezza
z
Costanza di grandezza.
z
z
z
z
L grandezza
La
d
di un oggetto
tt viene
i
aggiustata
i t t iin b
base alla
ll
distanza a cui sembra trovarsi, in modo che gli oggetti ci
appaiano sempre della stessa grandezza indipendentemente
dalla loro distanza.
E’ un fenomeno percettivo, non è dovuto al fatto che
sappiamo che la grandezza degli oggetti rimane sempre la
stessa
Il meccanismo della costanza di grandezza non funziona a
dovere se manca una stima accurata della distanza
A grandi distanze o da punti di osservazione inusuali il
meccanismo di compensazione non funziona più
(sottocostanza: pedoni osservati da un grattacielo)
9
Indizi pittorici
z
Grandezza relativa
z
z
La grandezza dell’immagine consecutiva aumenta
proporzionalmente alla distanza a cui l’immagine
consecutiva sembra trovarsi (il foglio sul tavolo o la parete
della stanza) (Legge di Emmert): invarianza
g
grandezza/distanza.
L’espansione dell’immagine consecutiva che vediamo è
legata alla compensazione per le distanze dovuta alla
costanza di grandezza (stiamo vedendo questa
compensazione?)
Costanza di grandezza
z
z
z
Questi tre dischi sembrano della stessa dimensione a tre
profondità diverse.
diverse
z
Ma variano molto per dimensione retinica
L’immagine retinica dipende dalla distanza
distanza. Lo si può
sperimentare con le immagini consecutive (che hanno per
definizione una grandezza fissa sulla retina)
z
z
Costanza di grandezza
Il fatto che abbiamo costanza di grandezza
significa che la dimensione percepita dipende da
qualcosa di più che la semplice immagine
retinica.
Sembra che teniamo conto anche della distanza
percepita
Questa relazione tra dimensione p
percepita
p e
distanza percepita è conosciuto come sizedistance scaling.
Legge di Emmert
z
Possiamo formalizzare la nozione di size-distance
scaling utilizzando la legge di Emmert:
Gp = k * Gr * Dp
(Sp -> grandezza percepita; Gr-> grandezza retinica;
Dp -> distanza percepita; k -> costante)
z
La legge di Emmert può spiegare sia la costanza di
grandezza sia i casi in cui non funziona (illusioni di
grandezza).
10
Costanza di grandezza
z
z
z
Paragonate le grandezze percepita del disco centrale e
quello di destra. Ci sembrano uguali.
Sappiamo che differiscono molto per grandezza retinica.
Sp = k * Sr * Dp
Fino a che la grandezza retinica e la distanza percepita
variano in modo inversamente proporzionale la
grandezza percepita rimane costante!
Illusione della luna
Illusione di grandezza
z
Senza buone informazioni sulla
profondità non abbiamo costanza di
grandezza
z
Illusione di grandezza: il cilindro a
destra sembra più grande di quello
di sinistra ma sono uguali
p = k * Gr * Dp
p
Gp
z
Gr è lo stesso per i due oggetti.
Però Dp è diverso
Illusione della luna
z
Near the horizon
11
Illusione della luna
z
Assumiamo che il cielo sia piatto e quindi la luna sopra di noi
assumiamo che sia più vicina e quindi più piccola; vicino
all’orizzonte la luna si crede più lontana ma la luna copre la
stesso angolo visivo, quindi sembra più grande
Costanza di grandezza
z
z
Illusione della luna
Quindi il sistema visivo
compensa l’informazione
l informazione data
dalla prospettiva e dalla
distanza quando giudica la
grandezza
E le correzioni sono grandi!
Illusione di Shepard
z
z
Vincolo forma/inclinazione (vincolo proiettivo)
Noi vediamo un mondo 3D
3D. Quindi abbiamo la tendenza a
strasformare immagini 2D in percetti 3D.
12
Illusione di Shepard
z
Noi vediamo un mondo 3D. Quindi abbiamo la tendenza a
strasformare immagini 2D in percetti 3D.
Conseguenze percettive
z
Illusione di Shepard
Grandezza e forma dell’oggetto sono relativa
alla distanza e all’inclinazione percepite
Ombre e contorni
Il nostro sistema visivo
parte dall’ipotesi
dall ipotesi che la
luce venga dall’alto. La
forma di una superficie
(convessa o concava) e
quindi la distribuzione
della profondità sulla
p
è influenzata
superficie
dall’ombreggiatura
13
Ombre e contorni
Ombreggiatura
z
z
Oggetti 3D proiettano ombre e in questo
modo tendono ad avere gradienti di
luminosità
Ipotesi
C’è solo una fonte di luce
z La luce viene dall’alto
z “alto“ è definito in relazione alla retina.
z
Ombreggiatura
Forma da ombreggiatura
I t
Interazione
i
tra
t una fonte
f t
di luce e le superfici
Cast Shadow
degli oggetti
z
z
z
z
Luminanza media o
Livello di chiarezza
Direzione della luce
Tipo di illuminazione
14
Direzione dell’illuminante
z
Sono concavi o convessi?
Direzione dell’illuminante
Direzione dell’illuminante
z
Influenze simultanee della
direzione dell’illuminante
z
Qual’è concavo e quale
convesso?
Raggruppamento basato
sull’illuminazione
15
Consistenza con
l’illuminazione globale
Direzione dell’illuminante
Forma influenza la percezione
Illusioni di bianchezza
z
Uguale variazione di ombreggiatura: la
direzione della luce varia
uguali
li
z
IL raggruppamento
influenza la
bianchezza tra
superfici diverse
16
Percezione della bianchezza
z
Conoscenza di
alto ordine sulle
ombre influenza
la percezione
della
bianchezza
Ombre proiettate
z
z
Ombreggiatura, speculatità e
tessitura
Sono uguali?
Ombre proiettate
Disambiguare
Di
bi
il
movimento
Riducono
l’ambiguità delle
forme guardate da
punti di vista
accidentali
17
Indizi cinetici
Il movimento degli oggetti può essere
determinante per percepire il rilievo e la
corporeità
z
1.
2.
3.
Parallasse di movimento
Effetto cinetico di profondità (Wallach)
Effetto stereocinetico (Musatti)
Parallasse di movimento
z
Posizione retiniche cambiano quando gli occhi si spostano.
Differenze in posizione danno disparità nel tempo: parallasse di
movimento.
Parallasse di movimento
z
Muovendo gli occhi da un lato
all’altro
all
altro oggetti più vicino di
spostano di più che i lontani.
z
Quelli lontani di muovono più
lentamente
Parallasse di movimento
z
z
Osservare il mondo dal finestrino del treno. La
velocità
l ità d
deglili oggetti
tti è proporzionale
i
l alla
ll di
distanza.
t
Il
mondo ruota attorno al punto di fissazione.
Il nostro sistema visivo è molto efficace ad utilizzare
la velocità come indice di profondità. Perché allora
sviluppare la stereopsi? La parallasse di movimento
per aver luogo
p
g necessita almeno del movimento
della testa mentre un predatore in agguato deve
rimanere assolutamente immobile.
18
KDE
Effetto stereocinetico
Indici monoculari
z
z
z
Nessuno degli indici fisiologici (monoculari o
binoculari) è efficace quando guardiamo un dipinto
Indici pittorici: devono essere appresi
z Prospettiva lineare
z Occlusione
z Sfuocamento atmosferico
z Ombre e contorni
z Altezza nel campo visivo
z Dimensione (relativa e familiare)
Indici di movimento
z Parallasse del movimento
19
Indizi binoculari
z
z
z
z
Indizi monoculari e cinetici ci procurano solo
i f
informazioni
i i sulla
ll di
distanza
t
relativa
l ti
Indizi binoculari ci danno informazioni sulla
distanza assoluta
E’ necessaria la presenza di una regione di
visibilità sovrapposta nei due occhi (campo
visivo binoculare)
Diversi animali hanno campi binoculari di
ampiezze diverse (p.e predatori e prede)
Disparita’ orizzontale
z
z
z
:a stessa immagine vista da due occhi.
Notate le distanze diverse degli oggetti tra loro.
loro
La differenza nelle posizioni di un oggetto nelle due immagini
definisce la sua disparita’ retinica
Disparita’ orizzontale
z
z
Data la separazione in orizzontale dei nostri
occhi
hi (6/7 cm)) le
l due
d iimmagini
i i sono spostate
t t
lateralmente una rispetto all’altra (parallasse
binoculare); Questa differenza e’ chiamata
disparita’ orizzontale.
Le due immagini vengono paragonate
z
A livello del chiasma ottico le fibre ottiche delle
emiretine nasali (la parte sinistra di ciascun
occhio) sono accoppiate: lo stesso accade per le
emiretine temporali
Disparazione retinica
z
z
Osservate un oggetto a 20 cm e chiudete
alternativamente gli occhi. Allontanate ora
gradualmente l’oggetto e osservate quello
che succede.
Il dito impossibile Scindere il guardare (lo
(
sfondo)) dall’osservare (focalizzare
l’attenzione, le dita).
20
Disparita’ orizzontale
z
z
La disparita’ retinica e’ la differenza tra la posizione
laterale di un oggetto nell’occhio
nell occhio destro e sinistro
sinistro.
Dipende dalla distanze relativa dell’oggetto dal
punto di fissazione
Ci procura due tipi di informazione
z
z
z
Piu’ lontano che il punto di fuoco -> disparita’ non crociata
Più vicino che il punto di fuoco -> disparita’
disparita crociata
Può esistere la disparità zero? Sì
O t
Oroptero:
piano
i
immaginario
i
i i d
dove ciascun
i
oggetto
tt
sul piano fa cadere immagini su parti corrispondenti
nei due occhi. Include naturalmente il punto di
fissazione.
z
z
Grandi differenze in profondità -> disparita’ grandi
Piccole differenze in profondità -> disparita’ piccole
Oroptero
z
z
Ampiezza
z
z
z
Segno
z
z
Disparità
Mettendo a fuoco un oggetto ad una data
profondità posizionate i vostri occhi in modo che
profondità,
l’immagine prodotto su entrambe le retine
corrisponda (i.e., disparità zero).
L’ Oroptero è la superficie 3D immaginaria che si
estende da questo oggetto per includere tutti gli altri
punti in cui le immagini cadono su posti
corrispondenti in entrambi gli occhi
occhi.
Gli oggetti che hanno la stessa distanza dall’osservatore
del punto di fissazione hanno disparità zero
Gli oggetti sull’ Oroptero proiettano immagini su punti
corrispondenti dei due occhi
Punti corrispondenti
z
z
z
Gli oggetti che cadono sullo stesso punto in ogni
occhio
hi cadono
d
su punti
ti corrispondenti
i
d ti
Qualsiasi cosa che cade sull’ Oroptero cadrà su
punti corrispondenti
Area 17 nel lobo occipitale ospita detettori di punti
corrispondenti
z
z
Cellule singole che rispondono solo quanto corrispondono
C’è un’unica immagine limpida di cui vi rendete
conto consciamente
21
Oroptero
Oroptero
z
z
z
Disparità non crociata: un oggetto più lontano che
quelli sull’Oroptero
sull Oroptero ha disparità non crociata – avete
bisogno di ‘disincrociare’ i vostri occhi per fissarlo.
Disparità crociata: un oggetto più vicino che quelli
sull’Oroptero ha disparità crociata – avete bisogno di
‘incrociare’ i vostri occhi per fissarlo.
Tutti gli oggetti che cadono sull’Oroptero saranno
percepiti alla stessa distanza dall’osservatore
Oroptero
Oroptero
22
Disparità crociata
Disparità non crociata
Punti disparati
Utilità della stereopsi
z
z
Gli oggetti più vicini o più lontani di quelli sull’
O t
Oroptero
cadono
d
su posizioni
i i i di
diverse neii d
due occhi
hi
Area 18 nel lobo occipitale – detettori di disparità
z
Cellule singole che rispondono a quantità specifiche di
disparità
Base della percezione della profondità
z
z
z
z
Le immagini doppie non sono percepite
consciamente
z
z
E’ indispensabile per localizzare con estrema
precisione
i i
lla posizione
i i
d
deglili oggetti
tti a di
distanze
t
ravvicinate (spazio manipolatorio).
Infilare un ago chiudendo un occhio
Far toccare le punte di due penne tendendo le
braccia e chiudendo un occhio
A parte questo fatto innegabile
innegabile, la stereopsi riveste
un ruolo abbastanza marginale nella percezione
della profondità dove invece dominano gli indici
pittorici
23
Stereogrammi etc.
z
Le persone sono sempre rimaste affascinate con la
creazione artificiale di percetti 3D
3D. Lo stereoscpio di
Wheatstone (1838) è stato il primo esempio.
z
z
z
z
Stereoscpio di Wheatstone(1838)
Presentava un’immagine per ogni occhio. Le immagini
differivano come differirebbero se noi stessimo guardando
invece che una fotografia un oggetto 3D (stereogrammi).
Aggiungendo artificialmente disparità alle due immagini, guardando attraverso lo stereoscopio si vedono oggetti in profondità.
Tecnica alternativa: i filtri colorati e anaglifi rosso-verde
Alcuni sono capaci di fondere gli stereogrammi senza
ausili.
Anaglifi rosso-verde
z
Tecnica usata nei vecchi film 3D:
z
z
z
Indossando occhiali con filtri
rosso/verde, si possono sovrapporre
una immagine rossa e una verde
sullo schermo ma si presentano due
diverse immagini a ciascun occhio.
Se le due immagini differiscono in
modo appropriato possono produrre
la percezione di profondità.
Problema: non si può utilizzare il
colore con questa tecnologia.
24
Esempio
z
Guardando quest’immagine utilizzando occhiali con filtri
rosso-verde (rosso sull
sull’occhio
occhio destro)
vedrete un quadrato che galleggia di
fronte allo sfondo.
z
Invertendo gli occhiali in modo che ora
il filtro verde sia sopra l’occhio destro il
quadrato apparirà dietro lo sfondo.
z
Invertendo le lenti, avete invertito la
disparità: nel primo caso il quadrato
aveva disparità crociata nel secondo
non crociata
Stereo Vision and Depth
Perception
z
Anaglyph Method
Stereo Vision and Depth
Perception
z
Anaglyph Method
Stereo Vision and Depth
Perception
z
Anaglyph Method
25
Stereo Vision and Depth
Perception
z
Correlogrammi di Bela Julez
(1928-2003)
z
z
Si basano sulla stereopsi e sulle capacità del sistema
visivo di estrarre una correlazione tra gli elementi
dell’immagine: una regolarità estratta dall’immagine
viene tradotta in una esperienza percettiva.
Negli anni 60, Julesz sviluppo i ‘random dot
stereograms’.
z
z
z
Ciascun occhio vede solo un insieme di puntini distribuiti random
nello spazio.
Quando l’informazione tra i due occhi viene combinata
combinata,
l’osservatore vede profondità e questa profondità definisce una
forma
In questo caso la percezione della profondità precede la
percezione della forma.
Anaglyph Random Dot Stereogram
Random dot stereograms
z
Per ‘fondere’
fondere gli stereogrammi è tenere il dito tra
gli occhi e lo stereogramma. Fissando il sito si
vedranno immagini multiple dello stereogramma.
Poi dovrete muovere il dito finché le immagini
fondono. Ci siete riusciti quando:
z
z
z
Vedete un quadrato galleggiare sopra la superficie
A t un’immagine
Avete
’i
i monoculare
l
ffantasma
t
ad
d entrambi
t
bi i
lati dell’immagine stereo.
Se questa strategia non funziona provate ad utilizzare
una pezzo di plastica tra voi e l’immagine.
26
Autostereogrammi
z
Combinano due immagini leggermente diverse nella
stessa regione nascondendole in distribuzioni
ripetitive.
z
Se avete problemi a vedere queste immagini provate ad
avvicinarvi all’immagine così da non riuscire più a fondere
(i.e., cioè a vedere doppio). Ora provate a fare in modo
che le due immagini coincidano. Quindi spostatevi
lentamente indietro cercando di tenerle insieme. Un paio di
tentativi dovrebbero aiutarvi.
aiutarvi
27
Autostereogrammi
z
Autostereogrammi
Conosciuti anche come "magic
magic eye
eye"
28
Autostereogrammi
Stereogrammi aleatori:
il problema della corrispondenza
z
z
Negli stereogrammi non si percepisce mai una
forma da sola
sola. Il percetto della forma segue sempre
il percetto della profondità. MA se non c’è una forma
percepita in visione monoculare come sa il nostro
sistema visivo che cosa associare?
La risposta è complessa, ma sappiamo che:
z
z
z
The Correspondence Problem
(Part 2)
La frequenza spaziale ha un forte ruolo nel risolvere
questo problema
Abbiamo bisogno di sovrapposizione di informazione
contenuta a varie frequenze spaziali nei due occhi per
vedere stereo
Quando l’informazione nei sue occhi è in conflitto, vediamo
rivalità binoculare
Rivalità binoculare
z
z
Un esempio di quando il sistema visivo non può
risolvere il problema della corrispondenza
corrispondenza.
Nella rivalità, immagini molto diverse sono
presentate a ciascun occhio.
z
z
Invece di mescolare, l’immagine di un occhio domina per
un pò e poi l’immagine dell’altro occhio domina.
Ci sono delle mescolanze durante i periodi di transizione.
29
Tong, Nakayama, Vaughan, Kanwisher (1998). Binocular Rivalry and Visual Awareness in Human Extrastriate
Cortex. Neuron, 21, 753-59.
Cos’è la causa del
movimento?
Motion Perception
Orientation
P iti
Positions
across retina
ti
Orientation
Positions across retina
30
Possibili cause
z
Movimento attraverso la retina
z
z
z
Oggetto in movimento o occhi in movimento?
z
z
z
No
Sì
No
Static
Vision
Retinal Motion
Sì
Eye/Body
movement
Tracking
Inseguimento di un oggetto o solo guardarsi in
giro?
Movimento della testa
Movimento del corpo
Che cos’è il movimento?
z
Mondo in movimento:
Occhi in movimenti-> scarica corollaria
z
z
Quattro possibilità
Occhi
O
hi in
i
movimento:
Movimento apparente
Cambio di posizione nel tempo
Si di
distinguono
ti
di
direzione
i
e velocità
l ità
Il calcolo del movimento reale non e’ semplice
Lo stesso evento fisico può essere interpretato come
movimenti diversi
31
Che cos’è il movimento?
z
z
z
z
z
Cambio di posizione nel tempo
Si di
distinguono
ti
di
direzione
i
e velocità
l ità
Il calcolo del movimento reale non e’ semplice
Lo stesso evento fisico può essere interpretato come
movimenti diversi
Due forme di indeterminazione cinematica
Problema dell’apertura
z
Problema della corrispondenza
z
Ambiguità
z
z
z
Il nostro sistema visivo interpreta
l’informazione che riceve.
L’informazione non implica un movimento
univoco, l’immagine e’ gravata da
indeterminazione cinematica
L’interpretazione
L
interpretazione può essere ambigua
Movimento indotto
z
z
Spiegato dal principio di organizzazione percettiva
chiamato ‘separazione di sistemi’
Secondo Wallach dipende dalla coesistenza di piu’
piu
meccanismi per l’analisi dei cambiamenti ottici: I
movimenti relativi si distribuiscono in funzione di
principi configurazionali
32
Organizzazione delle traiettorie
Problema dell’apertura
Problema dell’apertura
Problema dell’apertura
33
Problema dell’apertura :
soluzioni
z
Combinare il movimento locale applicando
vincoli:
i
li
z
z
Usare punti terminali che non sono ambigui
Usare l’ 'Intersezione dei vincoli'
Problema della corrispondenza:
soluzioni
z
Combinare i movimenti locali applicando I
vincoli:
z
z
z
Tipi di movimento
1.
2
2.
3.
4.
5.
6
6.
7.
Somiglianza e percorso più breve
Continuità e raggruppamento
Vincoli più forti p.e. plausibilità
Movimento apparente
Semplice traslazione: lancio di una palla.
Movimenti
M
i
i complessi:
l
i strada
d affolata
ff l
– movimento
i
locale e globale.
Movimento apparente:flash successivi, TV.
Effetti postumi del movimento: effetto cascata.
Struttura dal movimento: animali ben camuffati.
Movimento indotto: treno in movimento
Movimenti oculari:immagine cambia, il mondo è
stazionario
34
Effetti postumi del movimento
Movimento illusorio
Filmato
z
z
z
La forma non è influenzata
Adattamento al movimento è indipendente dalla
forma
Sistemi separati per il movimento e per la forma!
Movimento illusorio
Utilizzo dell’informazione di
movimento
•
Velocità relativa dell’osservatore e dell’ambiente
•
Direzione del movimento, tempo per la collisione
•
Segmentazione della figura dallo sfondo
•
Recupero dei parametri 3D
•
•
•
•
disruption of camouflage techniques
Parallasse del movimetno (3D depth)
Profondità cinetica (3D shape)
Identificazione dell’oggetto
•
humans, friend/foe
35
Movimento dell’osservatore
z
z
L’informazione derivata dalla visione è la guida
principale delle nostre azioni; la percezione del
movimento è centrale in modo particolare per i nostri
movimenti attraverso il mondo.
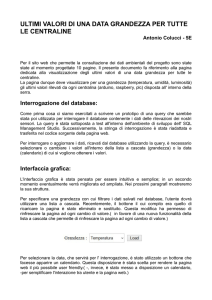
Il flusso ottico e la direzione del movimento
dell’osservatore: un’idea originariamente descritta
da JJ Gibson, il campo del flusso ottico è una
rappresentazione della direzione e della velocità del
movimento relativo all’osservatore.
Flusso ottico
Centre of
expansion ------>
= direction of
heading
Ricostruire la forma 3dimensionale
Flusso ottico
z
Le retine raccolgono una proiezione bidimensionale
d l mondo
del
d
z
z
Usiamo il movimento per recuperare una parte di
questa informazione
z
Filmato
z
z
Evitare collisioni
Mantenere l’equilibrio
z
La profondità è persa
Informazione diversa da punti di vista diversi combinati in
un singolo modello 3D
Due metodi:
z
z
Parallasse del movimento
Profondità cinetica
36