Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Novedrate, 15 giugno 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Calcolo dell’energia cinetica in un atto di moto rigido piano (con dimostrazione).
. Principio dei lavori virtuali.
Esercizi
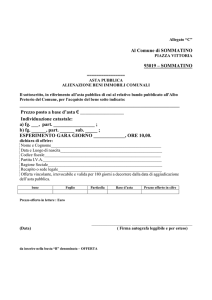
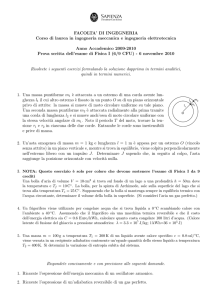
Esercizio 1. Il sistema di figura è posto in un piano verticale si compone di un’asta AB di lunghezza `
e massa m e di una lamina quadrata CDEF di lato a e massa m. L’asta è incernierata nel suo estremo
A ad un punto fisso; la lamina quadrata è appoggiata senza attrito sull’asta ed è posta ad una distanza
s dal punto A. Sull’estremo B dell’asta agisce una forza incognita F , diretta come in figura.
. Determinare il valore di F necessario a mantenere in equilibrio il sistema con l’asta orizzontale;
. in tale configurazione calcolare le reazioni vincolari in A.
F
m, a
E
G
s
C
A
F
D
m, `
B
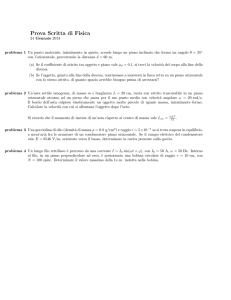
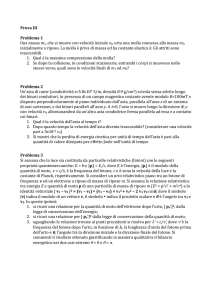
Esercizio 2. Il sistema di figura è posto in un piano orizzontale (si trascurino quindi le forze peso) e
si compone di un’asta AB di lunghezza ` e massa m e di un punto materiale C di massa m. L’asta è
incernierata nel suo estremo A ad un punto fisso; il punto scorre senza attrito lungo l’asta. Sull’estremo
B dell’asta agisce una forza incognita F , diretta come in figura e che si mantiene durante il moto sempre
ortogonale all’asta. Scegliendo come coordinate libere l’angolo ϑ che l’asta AB forma con la direzione
orizzontale e la distanza s tra il punto C ed A, si chiede di:
. scrivere la velocità del punto C;
. calcolare l’energia cinetica del sistema;
. calcolare la componente generalizzata della sollecitazione attiva;
. determinare, in funzione di s e ṡ, il valore di F che mantiene l’asta in rotazione uniforme ϑ̇ = ω0
(costante);
. in tali condizioni trovare il moto del punto materiale.
F
y
m, C
s
ϑ
A
x
B
m, `
Soluzioni
Esercizio 1.
. Il bilancio dei momenti del sistema rispetto ad A è
(sist.)
MAz
`
a
= F ` − mg − mg(s + ) = 0
2
2
⇒
F = mg
` + 2s + a
.
2`
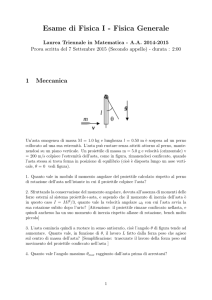
. Sia ΦA = HA i + VA j la reazione vincolare che la cerniera esercita sull’asta nel punto A.
Rx(sist.) = HA = 0
Ry(sist.) = VA − 2mg + F = 0
Esercizio 2.
. Sia er un versore diretto lungo l’asta e sia eϑ un versore ortogonale all’asta, nella direzione delle ϑ
positive.
2
(C − A) = s er ⇒ vC = ṡ er + sϑ̇ eϑ ⇒ vC
= ṡ2 + s2 ϑ̇2 .
.
T =
1
1
1 (asta) 2 1
2
IAz ϑ̇ + mvC
= m`2 ϑ̇2 + m ṡ2 + s2 ϑ̇2
2
2
6
2
. L’unica forza attiva è F (la forza peso non conta: il sistema è posto in un piano orizzontale).
(
(
δL(att) = F · δB = F `δϑ
Qs = 0
⇒
.
(att)
[teoria: δL
= Qs δs + Qϑ δϑ]
Qϑ = F `
. Calcoliamo i termini delle equazioni di Lagrange
d ∂T
dt ∂ ṡ
∂T
∂s
d ∂T
dt ∂ ϑ̇
∂T
∂ϑ
= ms̈
= msϑ̇2
1
d 1 2
=
m` ϑ̇ + ms2 ϑ̇ = m`2 ϑ̈ + 2msṡϑ̇ + ms2 ϑ̈
dt 3
3
= 0.
Le equazioni di Lagrange sono quindi:
ms̈ − msϑ̇2 = 0
1 2
m` ϑ̈ + 2msṡϑ̇ + ms2 ϑ̈ = F `
3
(1)
(2)
Valutando la (2) per il moto assegnato ϑ̇ = ω0 , ϑ̈ = 0, otteniamo il valore richiesto di F , in funzione
di s e ṡ
2mω0
F =
sṡ .
(3)
`
. L’andamento di s in funzione del tempo si ricava dalla (1):
s̈ − ω02 s = 0
⇒
s(t) = Aeω0 t + Be−ω0 t ,
dove A e B sono costanti arbitrarie che si possono determinare imponendo le condizioni iniziali
(non specificate nel testo). In conclusione, il punto C sfugge lungo l’asta con legge esponenziale.
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
Novedrate, 20 luglio 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica.
. Formula fondamentale dell’atto di moto rigido.
Esercizi
Esercizio 1.
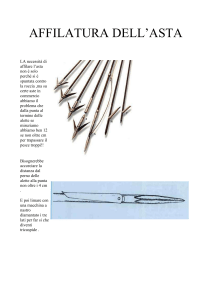
Nel riferimento ortogonale (O; x; y) di figura, l’asta AB, omogenea, di lunghezza ` e
massa m, ha gli estremi A e B scorrevoli rispettivamente lungo gli assi verticale y e orizzontale x. Un filo
inestensibile di massa trascurabile è legato ad un estremo al punto B dell’asta, passa su un piolo fisso C
posto sull’asse y ed è collegato ad O mediante una molla di costante elastica k. Tutti i vincoli sono lisci.
Si assuma come coordinata libera del sistema l’angolo antiorario ϑ di figura, che l’asta forma con l’asse
y. Sia s la coordinata che identifica l’allungamento della molla.
. Scrivere il legame cinematico tra s e ϑ, sapendo che la molla ha allungamento nullo (s = 0) quando
l’asta è verticale (ϑ = 0).
. Determinare k perché la configurazione con ϑ = π/3 sia di equilibrio.
. In tali condizioni, studiare la stabilità della posizione di equilibrio ϑ = π/3.
y
C
A
ϑ
`, m
s k
B
O
x
Esercizio 2. Si consideri il sistema dell’esercizio precedente e si ponga k = mg
` . Si assuma che il filo
rimanga sempre teso durante il moto del sistema. All’istante t = 0, l’asta è in posizione verticale (ϑ = 0)
e ha velocità angolare ω = ω0 k (ω0 ≥ 0).
Si chiede di:
. scrivere l’energia cinetica del sistema e l’energia meccanica totale;
. determinare l’estremo inferiore dei valori di ω0 tale per cui l’asta raggiunge la configurazione
orizzontale ϑ = π/2;
. scrivere l’equazione di moto;
. calcolare la reazione che l’asse verticale esercita sull’asta nel punto A.
Soluzioni
Esercizio 1.
. L’ordinata del punto A è yA = ` cos ϑ. La condizione di inestensibilità del filo impone che sia
ẏA = −ṡ. Il legame cercato è quindi
ṡ = `ϑ̇ sin ϑ ,
(1)
che, integrato, fornisce
s = C − ` cos ϑ ,
(2)
dove C è una costante arbitraria. Questa si può determinare sfruttando la condizione indicata
nel testo: a ϑ = 0 (asta verticale) corrisponde un’elongazione nulla della molla e quindi s = 0.
Sostituendo in (2) si ricava C = ` e quindi il legame finito tra le coordinate è
s = `(1 − cos ϑ) .
(3)
. Applichiamo il Teorema di stazionarietà del potenziale:
1
`
1
U (ϑ) = − ks2 − mgyG = − k`2 (1 − cos ϑ)2 − mg cos ϑ ,
2
2
2
dove abbiamo indicato con G il baricentro dell’asta AB.
Calcoliamo la derivata del potenziale
`
U 0 (ϑ) = sin ϑ mg − 2k`(1 − cos ϑ) .
2
(4)
(5)
Se, come richiesto nel testo, ϑ = π/3 è posizione di equilibrio, deve essere U 0 (π/3) = 0. Questa
condizione determina il valore cercato di k (si ricorda che cos π/3 = 1/2)
mg
.
(6)
mg − 2k`(1 − cos ϑ)
= mg − k` = 0 ⇒ k =
`
ϑ=π/3
. Sostituendo il valore trovato di k nella derivata prima del potenziale, si trova
U 0 (ϑ) =
1
mg` sin ϑ(2 cos ϑ − 1) ,
2
quindi la derivata seconda del potenziale è
U 00 (ϑ) = mg`(cos2 ϑ − sin2 ϑ − 2 cos ϑ) .
Sostituendo ϑ = π/3 si verifica che U 00 (π/3) = − 43 mg` < 0. La configurazione quindi corrisponde
ad un massimo del potenziale (ovvero un minimo dell’energia potenziale) ed è di equilibrio stabile.
Esercizio 2.
. Detto H il centro di istantanea rotazione dell’asta AB (che si trova all’intersezione della retta
verticale condotta per B con la retta orizzontale condotta per A), l’energia cinetica è
T =
1
1 1
`2 2
1
IHz ϑ̇2 =
m`2 + m
ϑ̇ = m`2 ϑ̇2 ,
2
2 12
4
6
dove, per calcolare il momento d’inerzia IHz abbiamo applicato il Teorema di Huygens-Steiner.
L’energia meccanica totale è (con k = mg/`)
(4)
E =T −U =
1 2 2 1
m` ϑ̇ + mg`[(1 − cos ϑ)2 + cos ϑ] .
6
2
(7)
. Le condizioni all’istante t = 0 permettono di calcolare il valore (costante) dell’energia meccanica.
Sostituendo quindi ϑ = 0 e ϑ̇ = ω0 nella (7), si ricava il valore di E:
E=
1 2 2 1
m` ω0 + mg` ,
6
2
la conservazione dell’energia meccanica è espressa quindi dal seguente integrale primo
1 2 2 1
1
1
m` ϑ̇ + mg`[(1 − cos ϑ)2 + cos ϑ] = m`2 ω02 + mg` .
6
2
6
2
(8)
La minima velocità angolare ω0 è quella necessaria a far arrivare l’asta in configurazione orizzontale,
con velocità nulla (ϑ̇ = 0). Valutando quindi la (8) nella configurazione di asta orizzontale (ϑ = π/2)
e con ϑ̇ = 0, si trova
1 2 2
m` ω0 = 0
⇒
ω0 = 0 .
6
Quindi l’energia potenziale iniziale, puramente gravitazionale (la molla ha estensione nulla) è esattamente quella necessaria per arrivare ad una configurazione con l’asta orizzontale, in cui l’energia
potenziale è puramente elastica. Si noti che la configurazione ϑ = 0 è di equilibrio instabile, ipotizziamo quindi di imporre inizialmente una piccola (“infinitesima”) velocità angolare per non ricadere
nella soluzione banale ϑ = 0, ϑ̇ = 0.
. L’equazione di moto si ricava semplicemente scrivendo il Teorema dell’energia cinetica. Per far ciò,
basta derivare la conservazione dell’energia meccanica (7):
dU
dT
dU
dT
−
=
−
ϑ̇ = 0 .
dt
dt
dt
dϑ
Sfruttando l’espressione della U 0 (ϑ) trovata prima, si ottiene dopo qualche passaggio:
ϑ̈ +
3g
sin ϑ(1 − 2 cos ϑ) = 0 .
2`
. La reazione vincolare in A è solo orizzontale: ΦA = HA i. Scriviamo la prima equazione cardinale
per l’asta, proietta lungo l’asse x: Q̇x = HA . Per calcolare la quantità di moto, scriviamo la velocità
del baricentro dell’asta:
(G − O) =
`
(sin ϑ i + cos ϑ j)
2
⇒
vG =
`
ϑ̇(cos ϑ i − sin ϑ j) .
2
Allora,
`
Qx = m ϑ̇ cos ϑ
2
⇒
`
HA = m (ϑ̈ cos ϑ − ϑ̇2 sin ϑ) .
2
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
Roma, 29 luglio 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica.
. Formula fondamentale dell’atto di moto rigido.
Esercizi
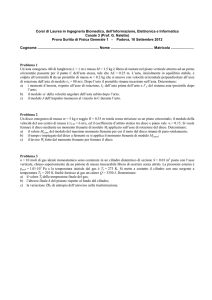
Esercizio 1. Nel riferimento ortogonale (O; x; y) di figura, l’asta AB, omogenea, di lunghezza ` e massa
m, ha gli estremi A e B scorrevoli rispettivamente lungo gli assi verticale y e orizzontale x. L’estremo A
dell’asta è collegato, mediante una molla di costante elastica k, ad un punto fisso C, posto sull’asse y ad
una distanza ` da O . Tutti i vincoli sono lisci.
Si assuma come coordinata libera del sistema l’angolo antiorario ϑ di figura, che l’asta forma con l’asse
y. Sia s la coordinata che identifica l’allungamento della molla.
. Scrivere il legame cinematico tra s e ϑ.
. Determinare k perché la configurazione con ϑ = π/3 sia di equilibrio.
. In tali condizioni, studiare la stabilità della posizione di equilibrio ϑ = π/3.
y
C
s
k
A
`
ϑ
`, m
B
O
x
Esercizio 2. Si consideri il sistema dell’esercizio precedente e si ponga k = 2mg/`. All’istante t = 0,
l’asta è in posizione verticale (ϑ = 0) e ha velocità angolare ω = ω0 k (ω0 ≥ 0).
Si chiede di:
. scrivere l’energia cinetica del sistema e l’energia meccanica totale;
. determinare il minimo valore di ω0 tale per cui l’asta raggiunge la configurazione orizzontale
ϑ = π/2;
. scrivere il valore dell’accelerazione angolare (ovvero di ϑ̈) quando l’asta passa dalla posizione
ϑ = π/4;
. calcolare la reazione che l’asse verticale esercita sull’asta nel punto A.
Soluzioni
Esercizio 1.
. Il legame tra cercato è
s + ` cos ϑ = `
⇒
s = `(1 − cos ϑ) .
(1)
Questa relazione può essere derivata per trovare il legame tra ṡ e ϑ̇:
ṡ = `ϑ̇ sin ϑ .
(2)
. Applichiamo il Teorema di stazionarietà del potenziale:
1
`
1
U (ϑ) = − ks2 − mgyG = − k`2 (1 − cos ϑ)2 − mg cos ϑ ,
2
2
2
dove abbiamo indicato con G il baricentro dell’asta AB.
Calcoliamo la derivata del potenziale
`
U 0 (ϑ) = sin ϑ mg − 2k`(1 − cos ϑ) .
2
(3)
(4)
Se, come richiesto nel testo, ϑ = π/3 è posizione di equilibrio, deve essere U 0 (π/3) = 0. Questa
condizione determina il valore cercato di k (si ricorda che cos π/3 = 1/2)
mg
= mg − k` = 0 ⇒ k =
mg − 2k`(1 − cos ϑ)
.
(5)
`
ϑ=π/3
. Sostituendo il valore trovato di k nella derivata prima del potenziale, si trova
U 0 (ϑ) =
1
mg` sin ϑ(2 cos ϑ − 1) ,
2
quindi la derivata seconda del potenziale è
U 00 (ϑ) = mg`(cos2 ϑ − sin2 ϑ − 2 cos ϑ) .
Sostituendo ϑ = π/3 si verifica che U 00 (π/3) = − 43 mg` < 0. La configurazione quindi corrisponde
ad un massimo del potenziale (ovvero un minimo dell’energia potenziale) ed è di equilibrio stabile.
Esercizio 2.
. Detto H il centro di istantanea rotazione dell’asta AB (che si trova all’intersezione della retta
verticale condotta per B con la retta orizzontale condotta per A), l’energia cinetica è
T =
1
1 1
`2 2
1
IHz ϑ̇2 =
m`2 + m
ϑ̇ = m`2 ϑ̇2 ,
2
2 12
4
6
dove, per calcolare il momento d’inerzia IHz abbiamo applicato il Teorema di Huygens-Steiner.
L’energia meccanica totale è (con k = 2mg/`)
(3)
E =T −U =
1 2 2 1
m` ϑ̇ + mg`[2(1 − cos ϑ)2 + cos ϑ] .
6
2
(6)
. Le condizioni all’istante t = 0 permettono di calcolare il valore (costante) dell’energia meccanica.
Sostituendo quindi ϑ = 0 e ϑ̇ = ω0 nella (6), si ricava il valore di E:
E=
1 2 2 1
m` ω0 + mg` ,
6
2
la conservazione dell’energia meccanica è espressa quindi dal seguente integrale primo
1 2 2 1
1
1
m` ϑ̇ + mg`[2(1 − cos ϑ)2 + cos ϑ] = m`2 ω02 + mg` .
6
2
6
2
(7)
La minima velocità angolare ω0 è quella necessaria a far arrivare l’asta in configurazione orizzontale,
con velocità nulla (ϑ̇ = 0). Valutando quindi la (7) nella configurazione di asta orizzontale (ϑ = π/2)
e con ϑ̇ = 0, si trova (ω0 ≥ 0 per ipotesi)
mg` =
1 2 2 1
m` ω0 + mg`
6
2
⇒
ω0 =
p
3g/` .
. L’equazione di moto si ricava semplicemente scrivendo il Teorema dell’energia cinetica. Per far ciò,
basta derivare la conservazione dell’energia meccanica (6):
dT
dU
dT
dU
−
=
−
ϑ̇ = 0 .
dt
dt
dt
dϑ
Sfruttando l’espressione della U 0 (ϑ) data dalla (4), si ottiene, dopo la sostituzione k = 2mg/` e
qualche passaggio:
3g
sin ϑ(3 − 4 cos ϑ) = 0 .
ϑ̈ +
2`
Valutando questa espressione in ϑ = π/4 si ricava
ϑ̈ = −
3g √
(3 2 − 4) ≈ −0.18 g/` .
4`
. La reazione vincolare in A è solo orizzontale: ΦA = HA i. Scriviamo la prima equazione cardinale
per l’asta, proietta lungo l’asse x: Q̇x = HA . Per calcolare la quantità di moto, scriviamo la velocità
del baricentro dell’asta:
(G − O) =
`
(sin ϑ i + cos ϑ j)
2
⇒
vG =
`
ϑ̇(cos ϑ i − sin ϑ j) .
2
Allora,
`
Qx = m ϑ̇ cos ϑ
2
⇒
`
HA = m (ϑ̈ cos ϑ − ϑ̇2 sin ϑ) .
2
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
Novedrate, 21 settembre 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali d’inerzia.
. Equazioni di Lagrange. Caso non conservativo.
Esercizi
Esercizio 1. In un piano verticale, un’asta OA, omogenea di lunghezza ` e massa m, è incernierata
in O. L’estremo A dell’asta scorre senza attrito sul lato verticale BC della lamina quadrata BCDE,
omogenea di lato ` e massa M , che a sua volta è appoggiata senza attrito su un asse orizzontale passante
per O. Una molla di costante elastica k collega il vertice B della lamina alla cerniera fissa O.
. Si determini il valore di k affinché il sistema rimanga in equilibrio con l’asta inclinata di ϑ = π/6
sull’orizzontale.
. Si calcolino, in corrispondenza di tale configurazione di equilibrio e con tale valore di k, le reazioni
vincolari agenti sulla lamina nei suoi vertici B ed E.
. Per quali valori di M l’appoggio della lamina è garantito?
y
C
A
`, m
ϑ
O
D
`, M
k B
x
E
Esercizio 2. Si consideri ancora il sistema dell’esercizio precedente. Si elimini la molla e si supponga
ora che una forza orizzontale F = −F i agisca sul vertice E della lamina quadrata.
. Scrivere la velocità della lamina, l’energia cinetica del sistema e la potenza delle sollecitazioni attive.
. Determinare il valore di F affinché l’asta ruoti con velocità angolare costante ω0 .
. Calcolare l’azione dell’asta sulla lamina.
y
C
A
`, m
ϑ
O
D
`, M
F
B
E
x
Soluzioni
Esercizio 1.
. Il potenziale del sistema è
`
1
U (ϑ) = −mg sin ϑ − k`2 cos2 ϑ .
2
2
Per il teorema di stazionarietà del potenziale, se ϑ = π/6 è posizione di equilibrio deve essere
U 0 (π/6) = 0:
√
`
3
2
0
0
⇒ U (π/6) =
` k` − mg = 0 .
U (ϑ) = cos ϑ 2k` sin ϑ − mg
2
4
Ricaviamo quindi il valore di k cercato
k=
mg
`
(1)
. Siano ΦB = VB j e ΦE = VE j le reazioni richieste. Determiniamo le incognite verticali VB e VE
utilizzando le seguenti equazioni cardinali della statica, scritte per la sola lamina quadrata:
(lamina)
MAz
Si ottiene:
=0
Ry(lamina) = 0 .
e
(
−Fel ` sin ϑ − M g 2` + VE ` = 0 ,
VB + VE − M g = 0 .
Tenendo conto che
√
(1)
Fel = k` cos ϑ =
si ricava infine
(2)
√
1
3
mg
VE = M g +
2
4
e
3
mg ,
2
√
1
3
VB = M g −
mg .
2
4
. L’appoggio è garantito fintanto che VB ≥ 0 e VE ≥ 0. Dall’espressione di VB si ottiene quindi
√
3
M≥
m.
2
Esercizio 2.
. (B − O) = ` cos ϑ i
L’energia cinetica è
⇒
T =
vB = −`ϑ̇ sin ϑ i.
1 (asta) 2 1
1
1
2
IOz ϑ̇ + M vB
= m`2 ϑ̇2 + M `2 ϑ̇2 sin2 ϑ .
2
2
6
2
(3)
Il baricentro dell’asta ha velocità
`
ϑ̇ n ,
2
essendo n un versore ortogonale all’asta: n = − sin ϑ i + cos ϑ j.
Le sollecitazioni attive sono il peso dell’asta e la forza F. La loro potenza è:
vG =
`
`
Π = −mg j · ϑ̇ n + F · vB = −mg ϑ̇ cos ϑ + F `ϑ̇ sin ϑ
2
2
(4)
. Utilizziamo il Teorema dell’energia cinetica Ṫ = Π e sostituiamo poi le condizioni indicate nel testo,
ϑ̈ = 0, ϑ̇ = ω0 ,
i
`2 h
ϑ̇ 3M sin ϑ cos ϑ ϑ̇2 + m + 3M sin2 ϑ ϑ̈
3
ϑ̈=0, ϑ̇=ω0
= M `2 ω03 sin ϑ cos ϑ .
Ṫ =
Uguagliando questa espressione con la potenza Π, si trova:
1
cos ϑ
F = M `ω02 cos ϑ + mg
.
2
sin ϑ
. Sia ΦA = HA i l’azione che l’asta esercita sulla lamina quadrata nel punto A. Scriviamo la prima equazione cardinale della dinamica per la sola lamina, proiettata lungo l’asse orizzontale. La
derivata della quantità di moto è
Q̇(lamina) =
d
M vB = −M `ϑ̈ sin ϑ i − M `ϑ̇2 cos ϑ i
= −M `ω02 cos ϑ i .
dt
ϑ̈=0, ϑ̇=ω0
La prima equazione cardinale quindi fornisce
HA − F = Q̇(lamina)
x
⇒
HA = F − M `ω02 cos ϑ =
cos ϑ
1
mg
.
2
sin ϑ
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
Novedrate, 28 ottobre 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali d’inerzia.
. Equazioni di Lagrange. Caso non conservativo.
Esercizi
Esercizio 1. Il sistema articolato di figura è composto da tre aste di ugual lunghezza, `, incernierate agli
estremi ed è posto in un piano verticale. L’asta BC ha massa m mentre le aste AC e AB sono di massa
trascurabile. Una molla di costante elastica k collega la cerniera in B con un punto D, posto sulla verticale per
B e alla stessa quota di A. Una forza incognita F = −F j agisce sulla cerniera C.
. Determinare F in modo tale che il sistema sia in equilibrio con ϑ = π/3.
. Si calcolino, in corrispondenza di tale configurazione di equilibrio, le reazioni vincolari a terra in A.
. Determinare le reazioni vincolari che l’asta BC esercita sulla cerniera in C.
F
m, `
C
`
B
k
`
y
ϑ
x
A
Esercizio 2. Il sistema biella-manovella di figura è posto in un piano verticale si compone di due aste AB e
BC di lunghezza ` e massa m, vincolate in B da una cerniera. L’estremo A di AC è vincolato a terra mediante
una cerniera, mentre l’estremo C di BC è libero di scorrere lungo una guida orizzontale. Una molla di costante
elastica k collega il carrello C con un punto fisso D posto sulla guida orizzontale a distanza 2` da A.
. Scrivere il legame tra la coordinata ϑ e l’elongazione della molla s.
. Determinare le coordinate del centro di istantanea rotazione dell’asta BC.
. All’istante iniziale t = 0, il sistema è in quiete con ϑ = π/2. Determinare la velocità angolare dell’asta
AB quando ϑ = 0.
. Calcolare, in funzione di ϑ, ϑ̇ e ϑ̈, le reazioni vincolari in A.
B
y
m, `
m, `
ϑ
s
A
2`
C
k
D
x
Soluzioni
Esercizio 1.
. Scriviamo la seconda equazione cardinale risp. ad A, per tutto il sistema:
√
MA = F `/2 − Fel `/2 = 0
⇒
F = Fel = k` sin ϑ = k
3
`.
2
. Detta ΦA = HA i + VA j la reazione che la terra esercita sulla cerniera in A, si ha
R x = HA = 0
⇒
HA = 0
Ry = VA − mg − F − Fel = 0
⇒
√
VA = mg + k 3 `
. Isoliamo l’asta AC (inclusa cerniera in C) dal resto del sistema. Nella figura seguente sono evidenziate le
forze agenti su ciascun sotto-sistema.
F
HC
HC
m, `
C
VC
B
mg
VC
`
Fel
`
VA0
HA0
HA0
HA
VA0
VA
Usiamo l’equazione del momento per l’asta BC, rispetto a B, per trovare VC e l’equazione del momento
per l’asta AC, rispetto ad A, per trovare HC :
(BC)
MB
(AC)
MA
`
= mg − VC ` = 0
⇒
2
√
3
`
`
= VC + F − HC
`=0
2
2
2
VC =
1
mg
2
⇒
1
1
HC = √ mg + k` .
2
2 3
Esercizio 2.
. 2` cos ϑ + s = 2`
⇒
s = 2`(1 − cos ϑ)
. Il centro di istantanea rotazione si trova, per il Teorema di Chasles, all’intersezione tra la retta verticale
passante per C e la retta che congiunge A con B (retta su cui giace l’asta AB). Le sue coordinate sono
quindi (2` cos ϑ, 2` sin ϑ).
. Applichiamo la conservazione dell’energia meccanica. Sia G il baricentro dell’asta BC:
(G − O) =
3
1
` cos ϑ i + ` sin ϑ j
2
2
⇒
3
1
vG = − `ϑ̇ sin ϑ i + `ϑ̇ cos ϑ j ,
2
2
Quindi,
2
vG
= `2 ϑ̇2
1
4
+ 2 sin2 ϑ .
(1)
L’energia cinetica è
1 1
1 (AB) 2 1
1 (BC)
1 1 2 2 1 2 2 1
2
IAz ϑ̇ + mvG
+ IGz ϑ̇2 =
m` ϑ̇ + m` ϑ̇
+ 2 sin2 ϑ +
m`2 ϑ̇2
2
2
2
2 3
2
4
2 12
1 2 2
= m` ϑ̇ 1 + 3 sin2 ϑ
3
T =
Il potenziale delle forze attive è:
`
1
U = −2mg sin ϑ − ks2 = −mg` sin ϑ − 2k`2 (1 − cos ϑ)2 .
2
2
(2)
Si arriva quindi al seguente integrale primo:
T −U =
1 2 2
m` ϑ̇ 1 + 3 sin2 ϑ + mg` sin ϑ + 2k`2 (1 − cos ϑ)2 = E = cost.
3
(3)
Valutando l’energia meccanica (3) all’istante t = 0 (ϑ = π/2, ϑ̇ = 0) e uguagliandola al valore della (3)
nella configurazione finale (ϑ = 0, ϑ̇ = ωf ), si ottiene:
r
3g 6k
1 2 2
2
mg` + 2k` = m` ωf
⇒
ωf = −
+
.
3
`
m
. Sia ΦA = HA i + VA j la reazione vincolare in A. Si può calcolare la componente HA ricorrendo alla prima
equazione cardinale, in direzione x, scritta per tutto il sistema:
Q̇(sist.)
= HA + Fel .
x
Poiché
3
`
Q(sist.)
= Q(AB)
+ Q(BC)
= −m ϑ̇ sin ϑ − m `ϑ̇ sin ϑ = −2m`ϑ̇ sin ϑ ,
x
x
x
2
2
e
Fel = ks = 2k`(1 − cos ϑ) ,
si ottiene infine
HA = −2m`ϑ̈ sin ϑ − 2m`ϑ̇2 cos ϑ − 2k`(1 − cos ϑ) .
Per ricavare la reazione verticale scriviamo la seconda equazione cardinale, per la sola asta AB, con polo
in B:
(AB)
(AB)
Γ̇B
= MB
− Ḃ × Q(AB) .
Osservando che la velocità di B è sempre parallela alla velocità del baricentro di AB (e quindi Ḃ × Q(AB) = 0),
la precedente equazione si semplifica in:
(AB)
Γ̇B
(AB)
= MB
.
Non rimane che calcolare i vari termini. Sia D il baricentro di AB,
(AB)
ΓB
(AB)
MB
(AB)
= m(D − B) × vD + IDz ϑ̇ k = −m
1
``
1
ϑ̇ k + m`2 ϑ̇ k = − m`2 ϑ̇ k ,
22
12
6
`
= mg cos ϑ k − VA ` cos ϑ k + HA ` sin ϑ k .
2
Ricaviamo quindi
VA =
1
1
mg + HA tan ϑ +
m`ϑ̈ .
2
6 cos ϑ
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
13 dicembre 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Trasporto del momento d’inerzia per assi paralleli (Teorema di Huygens-Steiner)
. Principio dei lavori virtuali
Esercizi
Esercizio 1.
Il sistema descritto in figura è posto in un piano verticale ed è composto da una lamina
rettangolare di massa m che si appoggia senza attrito su un disco omogeneo di massa m e raggio R. Il disco è
incernierato a terra in un punto della sua circonferenza. La lamina è appoggiata senza attrito a due muri e può
muoversi solo in verticale. Sul disco è applicata una coppia antioraria costante di momento M.
. Scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura.
. Determinare M in modo tale che il sistema sia in equilibrio con ϑ = π/3.
. Si calcolino, in corrispondenza di tale configurazione di equilibrio, le reazioni vincolari a terra in O0 .
y
B
m
A
H
M
s
C
ϑ
O
x
O0
m, R
Esercizio 2. Si consideri ancora il sistema descritto nell’esercizio precedente e sia la coppia M incognita.
. Scrivere l’energia cinetica e la potenza delle forze attive.
. Determinare il valore di M perché il disco ruoti con velocità angolare costante ω0 .
. Calcolare la reazione vincolare in H.
Soluzioni
Esercizio 1.
⇒
. s = R + R sin ϑ
ṡ = Rϑ̇ cos ϑ.
HB
HB 0
mg
HA
HA0
Φ
y
Evidenziamo in figura le forze agenti sui singoli corpi
rigidi. La prima equazione cardinale scritta per la
sola lamina rettangolare fornisce la reazione interna
Φ:
Ry(l) = 0 ⇒ Φ = mg .
La seconda equazione cardinale (risp. ad O0 ), scritta per il solo disco, permette di calcolare la coppia
incognita M:
Φ
.
(d)
M − ΦR cos ϑ − mgR cos ϑ = 0 ,
da cui, sostituendo la configurazione di equilibrio
ϑ = π/3 si ottiene:
mg
ϑ
HO0
⇒
MO 0 = 0
M
M = 2mgR cos ϑ = mgR .
x
VO0
In alternativa questo punto poteva essere risolto tramite il Teorema di stazionarietà del potenziale (chiamiamo G il baricentro della lamina rettangolare e b la sua altezza):
U = Mϑ − mgyC − mgyG = Mϑ − mgR sin ϑ − mg(R + R sin ϑ + b/2)
(a meno di costanti)
=
Mϑ − 2mgR sin ϑ .
Il valore di M all’equilibrio si ricava quindi imponendo la stazionarietà del potenziale:
∂U
= M − 2mgR cos ϑ = 0
∂ϑ
⇒
M = 2mgR cos ϑ = mgR .
. Basta a questo punto scrivere la prima equazione cardinale per il solo disco:
(
(
(
(d)
HO0 = 0
HO0 = 0
Rx = 0
⇒
⇒
(d)
0
VO − mg − Φ = 0
VO0 = 2mg
Ry = 0
.
Esercizio 2.
.
T =
1
1 (d)
1
13
1
3
2
mvG
+ IO0 z ϑ̇2 = mṡ2 +
mR2 ϑ̇2 = mR2 ϑ̇2 cos2 ϑ + mR2 ϑ̇2
2
2
2
2
2
2
4
| {z } | {z }
lamina
disco
Π = Mϑ̇ − mg ẏC − mg ṡ = Mϑ̇ − 2mgRϑ̇ cos ϑ .
. Applichiamo il Teorema dell’energia cinetica Ṫ = Π. Calcoliamo la derivata dell’energia cinetica
3
Ṫ = mR2 ϑ̇ϑ̈ cos2 ϑ − mR2 ϑ̇3 cos ϑ sin ϑ + mR2 ϑ̇ϑ̈ .
2
Valutando questa espressione nel moto assegnato (ϑ = ω0 t, ϑ̇ = ω0 e ϑ̈ = 0), si ottiene:
Ṫ = −mR2 ω03 cos(ω0 t) sin(ω0 t)
ϑ̈=0
Dall’equazione Ṫ = Π si ricava quindi il valore di M:
−mR2 ω03 cos(ω0 t) sin(ω0 t) = Mω0 − 2mgRω0 cos(ω0 t)
⇒
M = 2mgR cos(ω0 t) − mR2 ω02 cos(ω0 t) sin(ω0 t) .
. Possiamo calcolare la reazione Φ tramite la prima equazione cardinale della dinamica, scritta per la sola
(l)
(l)
lamina rettangolare e proiettata in direzione y: Q̇y = Ry .
La componente y della quantità di moto della lamina è
Q(l)
y = mṡ = mRϑ̇ cos ϑ ,
quindi
(ϑ̈=0)
2
2
Q̇(l)
y = mRϑ̈ cos ϑ − mRϑ̇ sin ϑ = −mRω0 sin(ω0 t) .
La prima equazione cardinale fornisce quindi
−mRω02 sin(ω0 t) = Φ − mg
⇒
Φ = mg − mRω02 sin(ω0 t) .
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
I sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Trasporto del momento d’inerzia per assi paralleli (Teorema di Huygens-Steiner)
. Principio dei lavori virtuali
Esercizi
Esercizio 1. Il sistema di figura è posto in un piano verticale e si compone di un’asta omogenea di lunghezza
l, massa m e di un disco con centro C di raggio R e massa m. L’asta è vincolata a scorrere senza attrito
in direzione verticale tramite un manicotto (posto a distanza d > R dall’asse delle y) ed il suo estremo B è
incernierato alla circonferenza del disco. Il disco è libero di strisciare senza attrito sulla guida orizzontale. Una
molla di costante elastica k collega un punto A della circonferenza con un punto A0 posto sull’asse delle y alla
b è di 90◦ . Sia H il punto di contatto tra disco e guida. Si chiede di:
stessa altezza di A. L’angolo ACB
. calcolare le coordinate xC e yB in funzione dell’angolo ϑ;
. scrivere il potenziale delle forze attive;
. determinare il valore di k perché il sistema stia in equilibrio con ϑ = π/2;
. calcolare in tale situazione la reazione vincolare che la guida orizzontale esercita sul disco in H.
y
m
d
m, R
k
A
A0
ϑ
B
ϑ
C
xC
O
H
yB
x
Esercizio 2. Si consideri il sistema descritto nel precedente esercizio.
Si chiede di:
. calcolare l’energia cinetica e la potenza delle forze attive;
. scrivere l’equazione di moto;
. determinare, in funzione di ϑ, ϑ̇ e ϑ̈, la componente verticale della reazione che l’asta esercita sul disco in
B.
Soluzioni
Esercizio 1.
. I legami cinematici tra le coordinate sono:
(
xC = d − R sin ϑ
yB = R + R cos ϑ
(
⇒
ẋC = −Rϑ̇ cos ϑ
ẏB = −Rϑ̇ sin ϑ
.
(1)
. Notiamo che xA = d − R sin ϑ − R cos ϑ. Il potenziale allora è
1
1
U (ϑ) = −mgyB − kx2A = −mgR(1 + cos ϑ) − k(d − R sin ϑ − R cos ϑ)2 .
| {z } | 2{z }
2
peso asta
molla
. Per trovare il valore di k che garantisce l’equilibrio per ϑ = π/2, imponiamo che si annulli la derivata
prima di U :
U 0 (ϑ) = mgR sin ϑ − kR(sin ϑ − cos ϑ)(d − R sin ϑ − R cos ϑ)
(2)
0
U (π/2) = mgR − kR(d − R) = 0 ,
da cui ricaviamo
k=
mg
.
d−R
(4)
Chiamiamo Φ = VH j la reazione (puramente verticale, in assenza
di attrito) che la guida orizzontale esercita sul disco nel punto di
contatto H. Scriviamo il bilancio dei momenti, per il solo disco,
con polo in B nella configurazione di equilibrio (ϑ = π/2):
Fel
HB
C
.
(3)
mg
(disco)
VB
MB
= mgR − VH R + Fel R = 0 ,
Poiché poi Fel = kxA = k(d − R), si ottiene
VH
mgR−VH R+kR(d−R) = 0
⇒
(4)
VH = mg+k(d−R) = 2mg .
Esercizio 2.
. L’energia cinetica è:
T =
1
1
1
1
1
3
2
2 (1) 1
mvC
+ ICz ϑ̇2 + mẏB
= mR2 ϑ̇2 cos2 ϑ + mR2 ϑ̇2 + mR2 ϑ̇2 sin2 ϑ = mR2 ϑ̇2
2
4
2
4
|2
{z2
} |2 {z }
asta
disco
. L’equazione di moto si ricava agevolmente dal Teorema dell’energia cinetica. Poiché già conosciamo il
potenziale, il modo più comodo per calcolare la potenza delle forze attive è derivare il potenziale rispetto
al tempo:
Π=
dU
(2)
= U 0 (ϑ)ϑ̇ = mgRϑ̇ sin ϑ − kRϑ̇(sin ϑ − cos ϑ)(d − R sin ϑ − R cos ϑ) .
dt
Otteniamo quindi la seguente equazione di moto (Ṫ = Π)
3
mR2 ϑ̇ϑ̈ = mgRϑ̇ sin ϑ − kRϑ̇(sin ϑ − cos ϑ)(d − R sin ϑ − R cos ϑ)
2
Semplificando otteniamo
ϑ̈ =
d
2g
2k
sin ϑ −
(sin ϑ − cos ϑ)
− sin ϑ − cos ϑ .
3R
3m
R
C
Φ
Per determinare la VB è comodo considerare le forze agenti sull’asta
anziché quelle agenti sul disco. Questo metodo è lecito in quanto,
per il principio di azione e reazione, la forza reattiva che l’asta
esercita sul disco è uguale in modulo e direzione, ma opposta in
verso, a quella che il disco esercita sull’asta.
Scriviamo allora la prima equazione cardinale per la sola asta, in
direzione verticale. Abbiamo
mg
.
mÿB = −mg − VB .
Sfruttando poi la relazione cinematica (1) ricaviamo
VB
ÿB = −Rϑ̈ sin ϑ − Rϑ̇2 cos ϑ ,
HB
e quindi
VB = mRϑ̈ sin ϑ + mRϑ̇2 cos ϑ − mg .
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
II sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali di inerzia.
. Stabilità. Teorema di Dirichlet-Lagrange per sistemi ad 1 g.d.l.
Esercizi
Esercizio 1. Il sistema disegnato in figura è posto in un piano verticale. Le aste OA e AB sono omogenee, di
massa m e lunghezza `. L’estremo O è vincolato a terra mediante una cerniera, e l’estremo B di AB scorre lungo
una guida orizzontale. Il carrello in B è legato ad un contrappeso P , di massa M , mediante un filo inestensibile
di massa trascurabile che si avvolge su di un piolo fisso C posto sulla guida orizzontale a distanza h da O. In
assenza di attrito, si chiede di:
. scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura;
. utilizzare il Principio dei Lavori Virtuali (PLV) per determinare la configurazione di equilibrio del sistema
(con ϑ ∈ [0, π/2]);
. in tale configurazione, calcolare la forza scambiata tra le aste nella cerniera A e le reazioni vincolari a
terra in O e in B.
h
O
B
C
x
ϑ
m, `
m, `
s
A
y
P, M
Esercizio 2. Si consideri il sistema descritto nel precedente esercizio. All’istante t = 0 il sistema si trova in
quiete con ϑ = π/2.
Si chiede di:
. scrivere l’energia cinetica, T , e il potenziale, U , del sistema;
. determinare la velocità angolare dell’asta OA quando questa passa dalla posizione orizzontale ϑ = 0 e
discutere la limitazione su M tale per cui la soluzione ha significato;
. calcolare, in funzione di ϑ, ϑ̇ e ϑ̈ la tensione del filo durante il moto.
Soluzioni
Esercizio 1.
. Indicando con L la lunghezza (costante) del filo, si trova:
(h − 2` cos ϑ) + s = L
⇒
ṡ = −2`ϑ̇ sin ϑ .
(1)
. Il lavoro virtuale è
δL = mgδyG1 + mgδyG2 + M gδs ,
dove il segno positivo è dovuto al fatto che abbiamo scelto l’asse y rivolto verso il basso e abbiamo indicato
con G1 e G2 i baricentri rispettivamente delle aste OA e AB.
I vettori posizione dei baricentri delle aste sono
(
(G1 − O) = 2` cos ϑ i + 2` sin ϑ j
(2)
`
(G2 − O) = 3`
2 cos ϑ i + 2 sin ϑ j
Quindi
δyG1 = δyG2 =
`
cos ϑ δϑ .
2
Dal legame (1) ricaviamo poi che
δs = −2`δϑ sin ϑ .
In conclusione quindi il lavoro virtuale risulta
δL = (mg` cos ϑ − 2M g` sin ϑ)δϑ .
Ponendo δL = 0, ∀ϑ si ricava che ϑ = ϑ? di equilibrio deve soddisfare
tan ϑ? =
m
.
2M
. Scomponiamo il sistema e introduciamo le reazioni vincolari come indicato nelle figura seguente
Per trovare HA e VA scriviamo l’equazione dei momenti per le aste OA (risp. ad O) e AB (risp. a B)
(
(
(OA)
ϑ
HA = 12 mg cos
MO
= mg 2` cos ϑ − VA ` cos ϑ − HA ` sin ϑ = 0
sin ϑ
⇒
.
(AB)
VA = 0
MB
= −mg 2` cos ϑ − VA ` cos ϑ + HA ` sin ϑ = 0
Ricordando poi che all’equilibrio tan ϑ = m/2M , si ricava
HA =
1
2M
mg
= Mg ,
2
m
VA = 0 .
Le reazioni a terra si ricavano semplicemente scrivendo la prima equazione cardinale per le singole aste:
(AB)
= −VB + mg + VA = 0
Ry
VB = mg
(OA)
⇒
HO = M g .
Rx
= HA − HO = 0
(OA)
VO = mg
Ry
= mg − VO − VA = 0
Esercizio 2.
. Le coordinate e la velocità del baricentro dell’asta AB sono
3
1
` cos ϑ i + ` sin ϑ j ,
2
2
1
3
= − `ϑ̇ sin ϑ i + `ϑ̇ cos ϑ j
2
2
1
1
2
2 2 9
= ` ϑ̇
sin ϑ + cos2 ϑ = `2 ϑ̇2
+ 2 sin2 ϑ
4
4
4
(G2 − O) =
vG2
2
vG
2
L’energia cinetica quindi è:
T =
1
1
1 (OA) 2 1
2
+ IG2 z ϑ̇2 + M vP2
IOz ϑ̇ + mvG
2
2
2
2
2
| {z } |
{z
} | {z }
asta OA
asta AB
punto P
1 1
1 1 2 2 1 2 2 1
1
=
m` ϑ̇ + m` ϑ̇
+ 2 sin2 ϑ +
m`2 ϑ̇2 + M ṡ2
23
2
4
2 12
2
1 2 2
= m` ϑ̇ + (m + 2M )`2 ϑ̇2 sin2 ϑ
3
Il potenziale è
U = mg(yG1 + yG2 ) + M gs
(1)+(2)
=
mg` sin ϑ + M g[L − (h − 2` cos ϑ)] .
Trascurando i termini costanti possiamo usare:
U = mg` sin ϑ + 2M g` cos ϑ .
. Sfruttiamo la conservazione dell’energia meccanica: T − U = E = cost. Dalle condizioni iniziali (a t = 0
si ha quiete con ϑ = π/2) ricaviamo il valore della costante E:
E = −mg` .
L’integrale primo dell’energia risulta
1 2 2
m` ϑ̇ + (m + 2M )`2 ϑ̇2 sin2 ϑ − mg` sin ϑ − 2M g` cos ϑ = −mg` .
3
(3)
Imponendo il passaggio dalla configurazione finale, ϑ = 0, possiamo ricavare l’incognita, ovvero la velocità
angolare ϑ̇. Poiché quando ϑ = 0 si ha sin ϑ = 0 e cos ϑ = 1, dalla (3) si ottiene
r
3g 2M − m
1 2 2
m` ϑ̇ − 2M g` = −mg` ⇒ ϑ̇ = −
.
3
`
m
Poiché la velocità angolare può assumere solo valori reali, la soluzione ha senso solamente quando il termine
sotto radice è maggiore o uguale a zero, ovvero per
M≥
m
.
2
Per valori di M < m/2 l’asta non raggiunge la posizione orizzontale; per M = m/2 l’asta OA raggiunge
la posizione ϑ = 0 con velocità angolare nulla e poi inverte il moto.
. Per calcolare la tensione del filo si può scrivere l’equazione fondamentale della dinamica per il punto P :
M s̈ = M g − T .
Da (1) ricaviamo che
s̈ = −2`ϑ̈ sin ϑ − 2`ϑ̇2 cos ϑ ,
e la tensione risulta quindi essere:
T = M g + 2M `ϑ̈ sin ϑ + 2M `ϑ̇2 cos ϑ .
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
III sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali di inerzia.
. Stabilità. Teorema di Dirichlet-Lagrange per sistemi ad 1 g.d.l.
Esercizi
Esercizio 1. Il sistema disegnato in figura è posto in un piano verticale. Le aste OA e AB sono omogenee, di
massa m e lunghezza `. L’estremo O è vincolato a terra mediante una cerniera, e l’estremo B di AB scorre lungo
una guida orizzontale. Il carrello in B è legato ad un contrappeso P , di massa m, mediante un filo inestensibile
di massa trascurabile che si avvolge sulla cerniera in A. Una coppia C di modulo costante e verso antiorario
agisce sull’asta OA. In assenza di attrito, si chiede di:
. scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura;
. utilizzare il Principio dei Lavori Virtuali (PLV) per determinare il valore di C in modo tale che il sistema
sia in equilibrio con ϑ = π/3;
. in tale configurazione, calcolare le reazioni vincolari a terra in O e in B.
B
O
x
C
ϑ
m, `
m, `
A
s
P, m
y
Esercizio 2. Il sistema disegnato in figura è posto in un piano verticale si compone di un disco omogeneo
di raggio R, massa m e centro C; di un’asta omogenea di lunghezza ` e massa m e di un punto materiale P di
massa m. Il disco rotola senza strisciare su una guida orizzontale. L’asta appoggia senza strisciare sul disco e
senza attrito su un piolo fisso A posto a distanza 2R dalla guida orizzontale. Un filo inestensibile e di massa
trascurabile collega il centro del disco con il punto P e si avvolge senza attrito su un secondo piolo fisso D posto
ad altezza R dalla guida. Scegliendo possibilmente la coordinata x indicata in figura come coordinata libera, si
chiede di:
. scrivere i legami cinematici tra le coordinate x, ϑ e s indicate in figura;
. calcolare la funzione di Lagrange, L , del sistema;
. determinare il moto del sistema sapendo che a t = 0 il sistema è in quiete con x(0) = R;
. calcolare il valore della componente orizzontale della reazione vincolare fra disco e asta.
ȳ
m, `
x
A
B
C
ϑ
D
s
O
x̄
H
P, m
Soluzioni
Esercizio 1.
. Indicando con L la lunghezza (costante) del filo, si trova:
L = BA + AP = ` + (s − ` sin ϑ)
⇒
ṡ = `ϑ̇ cos ϑ .
(1)
. Il lavoro virtuale è
δL = mgδyG1 + mgδyG2 + mgδs − Cδϑ ,
dove il contributo delle forze peso ha segno positivo poiché l’asse y è stato scelto verso il basso. Abbiamo
indicato con G1 e G2 i baricentri rispettivamente delle aste OA e AB.
I vettori posizione dei baricentri delle aste sono
(
(G1 − O) = 2` cos ϑ i + 2` sin ϑ j
(2)
`
(G2 − O) = 3`
2 cos ϑ i + 2 sin ϑ j
Quindi
δyG1 = δyG2 =
`
cos ϑ δϑ .
2
Dal legame (1) ricaviamo poi che
δs = `δϑ cos ϑ .
In conclusione quindi il lavoro virtuale risulta
δL = (2mg` cos ϑ − C)δϑ .
Ponendo δL = 0, ∀ϑ e imponendo che ϑ = π/3 sia equilibrio, si ricava
C = mg` .
(3)
. Sia ΦO = HO i − VO j la reazione nella cerniera in O e sia ΦB = −VB j la reazione a terra nel carrello B.
Per trovare HO , VO e VB non è necessario scomporre il sistema, basta scrivere le equazioni cardinali per
l’intero sistema
`
3
1
VB = 2 mg
MO = mg 2 cos ϑ + mg` cos ϑ + mg 2 ` cos ϑ − C − VB 2` cos ϑ = 0
π
(3),(ϑ= 3 )
=⇒
.
R x = HO = 0
HO = 0
Ry = 3mg − VO − VB = 0
VO = 52 mg
Esercizio 2.
. Poiché il disco rotola senza strisciare sulla guida orizzontale, le velocità di B e di C sono:
vB = 2Rϑ̇ i ,
vC = Rϑ̇ i .
Siccome l’asta non scivola sul disco, deve essere vB = ẋ i. Confrontando le due espressioni di vB , otteniamo
il legame tra x e ϑ
ẋ
ẋ = 2Rϑ̇
⇒
ϑ̇ =
.
(4)
2R
Per ricavare la dipendenza di s da x, imponiamo l’inestensibilità del filo: vP · (−j) = vC · i. Sapendo che
vP = −ṡ j, ricaviamo
(4) 1
ṡ = Rϑ̇ = ẋ .
(5)
2
. L’energia cinetica è:
T =
1 (d) 2 1
1
3
1
1
IHz ϑ̇ + mẋ2 + mṡ2 = mR2 ϑ̇2 + mẋ2 + mṡ2
2
2
2
4
2
2
| {z } | {z } | {z }
disco
(4),(5)
=
3
mR2
4
asta
ẋ
2R
punto P
2
1
1
+ mẋ2 + m
2
2
1
ẋ
2
2
=
L’unica forza attiva è la forza peso del punto P . Il potenziale quindi è
U = −mgyP = −mg(R − s) .
13
mẋ2 .
16
Trascurando i termini costanti possiamo usare U = mgs. Integrando la relazione (5) e trascurando la
costante di integrazione, possiamo scrivere il potenziale in funzione della coordinata x:
1
mgx .
2
U=
La lagrangiana è
13
1
mẋ2 + mgx .
16
2
L =T +U =
(6)
. L’equazione di moto si ricava dall’equazione di Lagrange
∂L
d ∂L
−
=0
dt ∂ ẋ
∂x
⇒
13
1
mẍ − mg = 0 ,
8
2
che, semplificata, diventa
ẍ =
4
g.
13
(7)
L’integrazione dell’equazione di moto è
x(t) =
2 2
gt + At + B .
13
Imponendo le condizioni iniziali x(0) = R, ẋ(0) = 0, si trova
x(t) =
2 2
gt + R .
13
. indichiamo con ΦB = HB i + VB j le reazioni che il disco esercita sull’asta in B a con ΦA = VA j la
reazione che il piolo A esercita sull’asta. La prima equazione cardinale scritta per la sola asta e proiettata
in direzione x, fornisce la reazione vincolare richiesta, HB .
(
(a)
Qx = mẋ
(7) 4
⇒ HB = mẍ =
mg .
(a)
13
Rx = HB
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
III sessione 2012, compito B
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Atto di moto rigido piano. Teorema di Eulero e Teorema di Chasles.
. Spostamenti virtuali. Vincoli ideali.
Esercizi
Esercizio
1. Il sistema disegnato in figura è posto in un piano verticale. L’asta AB ha massa m e lunghezza
√
` 2; le aste BC e CD hanno massa m e lunghezza `. L’estremo A di AB è incernierato a terra; l’asta CD è
vincolata a rimanere ortogonale ad una guida orizzontale mediante un pattino (ovvero trasla lungo l’asse x, ma
non può né ruotare né traslare in verticale). Una forza incognita F = −F i, applicata nel punto medio dell’asta
CD, mantiene il sistema in equilibrio con ϑ = π/4.
In assenza di attrito, si chiede di:
. calcolare, nella configurazione di figura, le coordinate del centro di istantanea rotazione dell’asta BC;
. determinare la forza F e le reazioni vincolari a terra in A e in D.
y
m, `
B
C
√
m, ` 2
F
m, `
ϑ
A
x
D
Esercizio 2. Il sistema disegnato in figura è posto in un piano verticale. Si compone di una lamina quadrata
CDEF omogenea di lato ` e massa m; di un’asta omogenea AB di lunghezza ` e massa m. Il lato CD della
lamina si appoggia su una guida orizzontale, scelta come asse x. Gli estremi dell’asta scorrono senza attrito sui
lati CD e CF della lamina, come indicato in figura. Una forza orizzontale incognita, F = F i, è applicata sul
lato DE.
Utilizzando le coordinate libere s e ϑ e in assenza di attrito, si chiede di:
.
.
.
.
scrivere le velocità dei punti A, B e del baricentro G dell’asta, in funzione delle coordinate libere;
calcolare l’energia cinetica del sistema e le componenti generalizzate delle sollecitazioni attive;
determinare F in modo tale che l’asta ruoti con velocità angolare costante ω0 ;
calcolare in tale situazione le reazioni vincolari agenti sull’asta in A e in B.
y
m, `
F
E
B
G
s
m, `
F
ϑ
A
O
C
D
x
Soluzioni
Esercizio 1.
. Il CIR dell’asta BC si trova mediante il Teorema di Chasles. Poiché vB ⊥ AB e vC ⊥ CD, il CIR è il
punto di intersezione tra il prolungamento di AB con il prolungamento di CD. Nella configurazione di
figura il CIR ha coordinate date da
CIR ≡ (2`, 2`) .
. Isoliamo l’asta CD e evidenziamo le forze agenti sui singoli sotto-sistemi:
VC
VC
B
mg
C HC
HC
C
F
mg
HA
A
mg
MD
D
VA
VD
Abbiamo complessivamente 7 incognite: HA , VA , HC , VC , VD , MD e F . Serviranno quindi 7 equazioni
indipendenti per risolvere il problema. L’obiettivo è scrivere delle equazioni semplici (non esiste ovviamente
un unico modo per fare ciò). Le reazioni HC e VC si possono calcolare semplicemente scrivendo la seconda
equazione cardinale per l’asta BC (polo in B) e per il sotto-sistema ABC (polo in A)
(
(
(BC)
MB
= −mg 2` + VC ` = 0
VC = 21 mg
.
⇒
(ABC)
`
3
HC = −mg
MA
= −mg 2 − mg 2 ` + VC 2` − HC ` = 0
A questo punto, le tre equazioni cardinali per la sola asta CD permettono di trovare VD , MD e F :
(CD)
= −HC − F = 0
R x
F = mg
(CD)
.
⇒
VD = 23 mg
= VD − mg − VC = 0
Ry
(CD)
1
`
`
MD = F 2 = 2 mg`
MC
= MD − F 2 = 0
Per calcolare HA e VA usiamo la prima equazione cardinale per tutto il sistema
(
(
(sist.)
HA = mg
= HA − F = 0
Rx
⇒
.
(sist.)
VA = 32 mg
= VA − 3mg + VD = 0
Ry
Esercizio 2.
. I vettori posizione dei punti A, B e G sono:
(A − O) = (s + ` cos ϑ) i ,
(B − O) = s i + ` sin ϑ j ,
`
`
(G − O) = s + cos ϑ i + sin ϑ j .
2
2
Derivando troviamo le velocità dei punti
vA = (ṡ − `ϑ̇ sin ϑ) i ,
vB = ṡ i + `ϑ̇ cos ϑ j ,
`
`
vG = ṡ − ϑ̇ sin ϑ i + ϑ̇ cos ϑ j .
2
2
(1)
2
. Calcoliamo preliminarmente la vG
:
2 `
2
`
`2
2 (1)
vG
= ṡ − ϑ̇ sin ϑ +
ϑ̇ cos ϑ = ṡ2 + ϑ̇2 − `ϑ̇ṡ sin ϑ
2
2
4
(2)
L’energia cinetica è:
T =
1 1
1 2 1
1 (asta)
1
1 `2
2
mṡ + mvG
+ IGz ϑ̇2 = mṡ2 + m ṡ2 + ϑ̇2 − `ϑ̇ṡ sin ϑ +
m`2 ϑ̇2
2
2
2
2
2
4
2
12
| {z } |
{z
}
lamina
asta
1
1
= mṡ2 + m`2 ϑ̇2 − m`ϑ̇ṡ sin ϑ .
6
2
(3)
Per calcolare le componenti generalizzate delle sollecitazioni attive, che indichiamo con Qs e Qϑ , sfruttiamo
la relazione (nota dalla teoria)
X
δL(att) =
Qk δqk = Qs δs + Qϑ δϑ ,
k
dove δL(att) è il lavoro virtuale delle forze attive.
Nel nostro caso, le forze attive sono la F e la forza peso dell’asta, che, per i conti che seguono, possiamo
schematizzare come una forza concentrata −mg j applicata nel baricentro G. Poiché
yG =
`
sin ϑ
2
⇒
δyG =
`
cos ϑ δϑ ,
2
otteniamo
(att)
δL
`
= F · δD + (−mg j) · δG = F δs − mg δyG = F δs − mg cos ϑ δϑ
2
⇒
(
Qs = F
Qϑ = −mg 2` cos ϑ
.
. Scriviamo le equazioni di Lagrange in forma non conservativa
d ∂T
∂T
−
= Qs ,
dt ∂ ṡ
∂s
d ∂T
∂T
−
= Qϑ .
dt ∂ ϑ̇
∂ϑ
Sviluppiamo i conti per i termini cinetici
d ∂T
d
1
1
1
=
2mṡ − m`ϑ̇ sin ϑ = 2ms̈ − m`ϑ̈ sin ϑ − m`ϑ̇2 cos ϑ
dt ∂ ṡ
dt
2
2
2
∂T
=0
∂s
1
d 1 2
1
1
1
d ∂T
=
m` ϑ̇ − m`ṡ sin ϑ = m`2 ϑ̈ − m`s̈ sin ϑ − m`ṡϑ̇ cos ϑ
dt ∂ ϑ̇
dt 3
2
3
2
2
∂T
1
= − m`ṡϑ̇ cos ϑ .
∂ϑ
2
Le equazioni di moto sono
1
1
2ms̈ − m`ϑ̈ sin ϑ − m`ϑ̇2 cos ϑ = F
2
2
1 2
`
1
m` ϑ̈ − m`s̈ sin ϑ = −mg cos ϑ
3
2
2
(4)
(5)
Sostituiamo il moto imposto, ovvero sostituiamo ϑ̇ = ω0 e ϑ̈ = 0 nelle equazioni di moto
1
2ms̈ − m`ω02 cos ω0 t = F
2
1
`
m`s̈ sin ω0 t = mg cos ω0 t .
2
2
Ricavando s̈ dalla seconda e sostituendo nella prima, otteniamo il valore di F
cos ω0 t 1
− m`ω02 cos ω0 t
sin ω0 t
2
cos ω0 t
s̈ = g
.
sin ω0 t
F = 2mg
(6)
(7)
. Indichiamo con ΦA = VA j e ΦB = HB i le reazioni che la lamina esercita sull’asta, rispettivamente in A
e in B. Usiamo la prima equazione cardinale scritta per la sola asta
R(e) = −mg j + VA j + HB i ,
`
`
(1)
Q(asta) = mvG = m ṡ − ϑ̇ sin ϑ i + m ϑ̇ cos ϑ j ,
2
2
cos ω t
` 2
` 2
`
`
(7)
0
(asta) Q̇
− ω02 cos ω0 t i − m ω02 sin ω0 t j
ϑ̈=0 = m s̈ − ω0 cos ω0 t i − m ω0 sin ω0 t j = m g
2
2
sin ω0 t
2
2
ϑ̇=ω0
`
VA = mg − m ω02 sin ω0 t ,
2
cos ω t
`
0
HB = m g
− ω02 cos ω0 t .
sin ω0 t
2
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
IV sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Atto di moto rigido piano. Teorema di Eulero e Teorema di Chasles.
. Spostamenti virtuali. Vincoli ideali.
Esercizi
Esercizio 1. Il sistema disegnato in figura è posto in un piano verticale. Si compone di un’asta OH omogenea
di massa m e lunghezza 2` e di una lamina ABCD omogenea quadrata di massa m e lato `. L’asta è incernierata
a terra nell’estremo O e passa per il baricentro G della lamina scorrendo in una cerniera fissa in G sui cui è stata
praticata una scannellatura. Il lato AB della lamina è vincolato a scorrere in verticale, mediante due appoggi in
A e in B. Sull’estremo H dell’asta è applicata una forza verticale F = F j, che mantiene il sistema in equilibrio
con ϑ = π/3.
In assenza di attrito, si chiede di:
. scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura;
. calcolare la forza F ;
. determinare le reazioni vincolari a terra in A e in B e la reazione che l’asta esercita sulla lamina in G.
y
H
m, 2`
A
F
D
`/2
G
m, `
s
C
B
ϑ
O
x
Esercizio 2. Si consideri ancora il sistema descritto nell’esercizio precedente. All’istante t = 0 la forza F
viene posta istantaneamente a zero e il sistema abbandona la configurazione di equilibrio, partendo dalla quiete
e procedendo in caduta libera.
In assenza di attrito, si chiede di:
. scrivere l’energia cinetica e il potenziale del sistema;
. determinare la velocità angolare dell’asta quando passa dalla configurazione orizzontale ϑ = 0;
. calcolare, in funzione di ϑ, ϑ̇ e ϑ̈, la reazione vincolare che l’asta esercita sulla lamina quadrata.
Soluzioni
Esercizio 1.
. Il baricentro G della lamina si mantiene ad una distanza fissa e pari a `/2 dall’asse delle y, si ha quindi
xG = `/2. Poiché vale xG = OG cos ϑ, il segmento OG è
OG =
` 1
.
2 cos ϑ
In conclusione il vettore posizione di G è
(G − O) =
`
`
i + tan ϑ j .
2
2
Ricaviamo quindi
s = yA = yG +
`
`
= (1 + tan ϑ)
2
2
⇒
ṡ =
`ϑ̇
.
2 cos2 ϑ
(1)
Ricordiamo che
d sin x
cos x sin x(− sin x)
sin2 x + cos2 x
1
d
tan x =
=
−
=
=
.
2
dx
dx cos x
cos x
cos x
cos2 x
cos2 x
. Per trovare F possiamo altrettanto bene applicare il teorema di stazionarietà del potenziale o le equazioni
cardinali. Scegliamo di scrivere le equazioni cardinali.
Isoliamo l’asta OH e evidenziamo le forze agenti sui singoli sotto-sistemi:
HA
F
Φ
m, 2`
π/3
Φ
mg
HB
mg
π/3
HO
VO
Si osservi che: (1) la reazione Φ è ortogonale all’asta in quanto la cerniera passante posta in G è priva
di attrito; (2) Φ e mg sono applicate entrambe nel baricentro dell’asta. Ciò è dovuto al fatto che stiamo
valutando le forze nella configurazione di equilibrio ϑ = π/3, ma non è vero in generale. Per dimostrarlo,
calcoliamo
` 1 OG =
= `,
2 cos ϑ ϑ=π/3
in quanto cos π3 = 12 .
Calcoliamo Φ scrivendo la prima equazione cardinale, in direzione y, per la sola lamina quadrata
Ry(lamina) = Φ cos ϑ − mg = 0
⇒
Φ = 2mg .
La seconda equazione cardinale (polo in O) per la sola asta ora fornisce F :
(OH)
MO
= F 2` cos ϑ − mg` cos ϑ − Φ` = 0
. Le reazioni HA e HB si possono ricavare da
(
(lamina)
Rx
= HA + HB − Φ sin ϑ = 0
(lamina)
MG
= HB 2` − HA 2` = 0
⇒
⇒
F =
1
5
mg + Φ = mg .
2
2
√
Φ
3
HA = HB = sin ϑ = mg
.
2
2
Esercizio 2.
. L’energia cinetica è:
T =
1 2 1 (asta) 2 (1) 1
`2 ϑ̇2
11
2
1 2 ϑ̇2
2
2
mṡ + IOz ϑ̇ = m
+
m(2`)
ϑ̇
m`
+ m`2 ϑ̇2 .
=
4
4
2 4 cos ϑ 2 3
8
cos ϑ 3
|2 {z } |2 {z }
lamina
(2)
asta
Sia K il baricentro dell’asta. Il potenziale è determinato solo dalle forze peso (per ipotesi è F = 0) e vale
`
U = −mgyG − mgyK = −mg tan ϑ − mg` sin ϑ
2
(3)
. Sfruttiamo la conservazione dell’energia meccanica: T − U = E =costante. All’istante t = 0 si ha ϑ = π/3
e ϑ̇ = 0, quindi
√
√
`√
3
(2)+(3)
E = (T − U )ϑ̇=0,ϑ=π/3 = mg
3 + mg`
= mg` 3 .
2
2
In ogni istante il sistema conserva questo valore dell’energia meccanica. In particolare, quando l’asta è
orizzontale (ϑ = 0) sarà
√
1
2
19 2 2
mg` 3 = (T − U )ϑ=0 = m`2 ϑ̇2 + m`2 ϑ̇2 =
m` ϑ̇ ,
8
3
24
da cui si ricava
s
ϑ̇ = −
√
24 3 g
,
19 `
dove il segno meno è stato scelto perché, come specificato nel testo, l’asta sta cadendo (e quindi ϑ decresce).
. Con riferimento alla figura precedente, calcoliamo la Φ usando la prima equazione cardinale della dinamica,
scritta per la sola lamina e proiettata in direzione y.
Ry(lamina) = −mg + Φ cos ϑ ,
m`ϑ̇
2 cos2 ϑ
m`ϑ̈
m`ϑ̇
− sin ϑ
m`ϑ̇2 sin ϑ
m`ϑ̈
=
+
(−2)
+
ϑ̇ =
2
3
2
2 cos ϑ
2
cos ϑ
2 cos ϑ
cos3 ϑ
(1)
Q(lamina)
= mṡ =
y
Q̇(lamina)
y
Ry(lamina) = Q̇(lamina)
y
⇒
Φ=
m`ϑ̈
m`ϑ̇2 sin ϑ
mg
+
+
cos ϑ 2 cos3 ϑ
cos4 ϑ
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
V sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica.
. Potenza in un atto di moto rigido. Potenza delle forze interne per un corpo rigido.
Esercizi
Esercizio 1.
Il sistema di figura è posto in un piano verticale e si compone di una lamina fissa a forma
di triangolo rettangolo isoscele di cateto h e con l’ipotenusa inclinata di π/4 rispetto all’orizzontale. Un disco
omogeneo di massa
√ m e raggio R rotola senza strisciare sull’ipotenusa della lamina. Una molla di costante
elastica k (k ≤ 2mg/R) collega il centro C del disco con un punto C 0 , posto lungo l’asse delle y alla stessa
quota di C. Scegliendo s come coordinata libera, si chiede di:
.
.
.
.
scrivere il legame cinematico tra le coordinate s, ϑ e yC indicate in figura;
calcolare la configurazione di equilibrio;
determinarne la stabilità;
studiare la frequenza delle piccole oscillazioni
y
s
m, R
k
C0
C
ϑ
H
h
yC
π/4
x
O
Esercizio 2. Si consideri ancora il sistema descritto nell’esercizio precedente e si supponga ora che la lamina
possa traslare senza attrito lungo l’asse delle x e abbia massa m. Si elimini inoltre la molla.
Si chiede di:
.
.
.
.
scrivere la velocità del punto C in funzione delle coordinate libere x e s;
calcolare l’energia cinetica e la quantità di moto del sistema;
determinare due integrali primi del moto e fornirne un’interpretazione meccanica;
sapendo che all’istante t = 0, il sistema è in quiete con
√ s = 0, determinare la velocità della lamina
triangolare e la velocità angolare del disco quando s = h 2.
y
s
m, R
C
ϑ
H
h
m
π/4
x
O
A
B
x
Soluzioni
Esercizio 1.
. Per il puro rotolamento deve essere ṡ = Rϑ̇.
y
s
s
√
2
2
R
s
√
2
2
R
h
√
2
2
√
2
2
π/4
x
O
Detta h l’altezza della lamina triangolare è poi (si veda la figura)
√
√
√
2
2
2
yC = h − s
+R
,
⇒
ẏC = −ṡ
.
2
2
2
. Per trovare la (o le) configurazioni di equilibrio sfruttiamo il teorema di stazionarietà del potenziale.
√
√ √
√ 2
2
1 2
2 2
1
U = −mgyC − k|C − C 0 |2 = −mg h − s
+R
− k s
+R
2
2
2
2
2
2
A meno di costanti, otteniamo quindi
√
U=
2
1
mgs − k(s + R)2
2
4
(1)
Deriviamo rispetto a s e poniamo uguale a zero per trovare la configurazione di equilibrio:
√
√
1
∂U
2
2 mg
=
mg − k(s + R) = 0 ,
⇒
s=
−R.
∂s
2
2
k
. L’equilibrio è sempre stabile, infatti studiando il segno della derivata seconda abbiamo
∂2U
1
=− k<0
2
∂s
2
∀s .
. Per determinare la frequenza della piccole oscillazioni abbiamo bisogno di conoscere l’energia cinetica:
T =
13
3
mR2 ϑ̇2 = mṡ2 .
2 2
4
Confrontando con l’espressione generale
T =
1
a(q)q̇ 2 ,
2
ricaviamo che il coefficiente di massa all’equilibrio, a(q̄), è dato da a(q̄) = 23 m. La pulsazione delle piccole
oscillazioni è
s
s
r
V 00 (q̄)
k/2
k
ω=
=
=
.
a(q̄)
3m/2
3m
Esercizio 2.
. Osserviamo preliminarmente che il legame tra s e ϑ è ancora: ṡ = Rϑ̇.
Le coordinate del punto C sono:
(
√
√
xC = x + s √22 + R √22
.
yC = h − s 22 + R 22
(2)
Derivando, ricaviamo la velocità vC
√ √
2
2
vC = ẋ + ṡ
i − ṡ
j
2 √
2
2
vC
= ẋ2 + ṡ2 + 2 ẋṡ .
(3)
(4)
. L’energia cinetica è:
T =
ṡ2
√
1
1
1
1 (disco) 2
1
11
2
mẋ2 + mvC
+ ICz
ϑ̇ = mẋ2 + m(ẋ2 + ṡ2 + 2 ẋṡ) +
mR2
2
2
2 2
R2
|2 {z } |2
{z
} 2
lamina
disco
√
3
2
= mẋ2 + mṡ2 +
m ẋṡ .
4
2
(5)
La quantità di moto del sistema è
√
√ 2
2
i − mṡ
Q = mẋ i + mvC = m 2ẋ + ṡ
j
2
2
(6)
. Poiché le reazioni vincolari esterne, in A e in B, sono verticali, la prima equazione cardinale, proiettata
in direzione x, consente di affermare che si conserva la componente x della quantità di moto. Il primo
integrale primo è quindi:
√
2
Qx = 2mẋ +
mṡ = cost.
(7)
2
La seconda quantità conservata è l’energia meccanica del sistema:
√
√
3
2
2
E = T − U = mẋ2 + mṡ2 +
m ẋṡ −
mgs = cost.
4
2
2
(8)
. Calcoliamo le quantità conservate (7), (8) sfruttando la conoscenza della condizioni iniziali. Sappiamo
infatti che a t = 0 il sistema è in quiete (ẋ = 0, ṡ = 0) con x = 0 e s = 0:
Qx =0
E
= 0.
(9)
t=0
t=0
I due integrali primi si posso quindi riscrivere nella seguente forma
√
4ẋ + 2ṡ = 0
√
√
3
2
2
ẋ2 + ṡ2 +
ẋṡ −
gs = 0
4
2
2
√
Il testo chiede di calcolare ẋ e ṡ all’istante finale, quando s = h 2. Ponendo quest’ultimo valore negli
integrali primi sopra individuati, ricaviamo
r
r
gh
8gh
ẋ = −
,
ṡ =
,
5
5
da cui otteniamo immediatamente la velocità angolare del disco
r
ṡ
8gh
ϑ̇ =
=
.
R
5R2
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
VI sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Equazioni di Lagrange. Caso non conservativo.
. Stabilità. Teorema di Dirichlet-Lagrange per sistemi ad 1 g.d.l.
Esercizi
Esercizio 1. Il sistema di figura è posto in un piano verticale ed è costituito da un’asta AB di massa m e
lunghezza 3R e da un disco omogeneo di centro C, massa M e raggio R. Il disco rotola senza strisciare su una
guida orizzontale. L’estremo A dell’asta è vincolato tramite un carrello all’asse delle y e l’estremo B dell’asta
è incernierato ad un punto della circonferenza del disco. Il sistema è tenuto in equilibrio con ϑ = π/6 da una
coppia concentrata C = −C k applicata sull’asta. In assenza di attrito, si chiede di:
. determinare l’angolo α che il raggio CB forma con l’orizzontale;
. calcolare il valore di C all’equilibrio (ϑ = π/6);
. determinare le reazioni vincolari in A e in B.
y
M, R
B
C
α
C
m, 3R
ϑ
A
x
H
Esercizio 2. Il sistema di figura è posto in un piano verticale ed è costituito da un’asta AB di massa m e
lunghezza R e da un disco omogeneo di centro O, massa m e raggio R. Il disco ruota senza attrito attorno al
proprio centro. L’asta è vincolata nel suo estremo A a scorrere lungo l’asse orizzontale mediante un carrello
liscio. L’estremo B dell’asta è vincolato mediante cerniera ad un punto della circonferenza del disco. Una forza
incognita F(t) = −F (t) i è applicata sul carrello in A. In assenza di attrito, si chiede di:
. scrivere la velocità del punto A in funzione delle coordinata libera ϑ e trovare le coordinate del centro di
istantanea rotazione dell’asta AB;
. calcolare l’energia cinetica del sistema;
. determinare la forza F (t) perché il disco ruoti con velocità angolare costante;
. in tale situazione, calcolare le reazioni vincolari interne in B.
y
B
m, R
m, R
F
ϑ
O
A
x
Soluzioni
Esercizio 1.
. Con riferimento alla figura seguente, notiamo che yB = 3R sin ϑ =
3
R.
2
B
α
3R
3
R
2
R
C
B0
R
π/6
A
Ma è anche yB = R + R sin α, da cui si ricava
sin α =
1
2
⇒
α=
π
.
6
. Evidenziamo le forze agenti sui singoli sotto-sistemi.
VB
VB
HB
HB
C
ϑ
α
C
Mg
mg
HA
HH
VH
Il valore di C si ricava scrivendo la seconda equazione cardinale della statica per tutto il sistema, con polo
in H:
√
3R
5 3
π
π
MH = −C + mg
cos 6 + R cos 6 = 0 , ⇒ C =
mgR .
2
4
Si ricorda che: (1) HA , HH e VH non compaiono nell’equazione perché hanno braccio nullo e (2) VB e HB
non compaiono perché forze interne al sistema.
. È sufficiente scrivere le tre equazioni cardinali per la sola asta
(asta)
= HA + HB = 0
Rx
(asta)
Ry
= VB − mg = 0
√
(asta)
3
1
M(B) = mg 3R
2 2 + HA 3R 2 − C = 0
La soluzione del precedente sistema di equazioni è:
VB = mg ,
mg
HB = − √ ,
3
mg
HA = √ .
3
Esercizio 2.
. Il triangolo OBA è isoscele, quindi il raggio OB forma un angolo ϑ con l’asse delle x.
xA = 2R cos ϑ
⇒
vA = ẋA i = −2Rϑ̇ sin ϑ i .
Per il Teorema di Chasles, il centro di istantanea rotazione dell’asta AB si trova nel punto di intersezione
della retta verticale condotta per A e il prolungamento del raggio OB. Detto H il CIR è dunque
H ≡ (2R cos ϑ, 2R sin ϑ) .
. Sia G il baricentro dell’asta AB:
(G − O) = (G − A) + (A − O) = −
R
R
3
R
cos ϑ i + sin ϑ j + 2R cos ϑ i = R cos ϑ i + sin ϑ j .
2
2
2
2
3
R
vG = − Rϑ̇ sin ϑ i + ϑ̇ cos ϑ j
2
2
Per calcolare l’energia cinetica dell’asta AB è conveniente usare il Teorema di König:
T =
1 (d) 2 1
1 (a)
2
IOz ϑ̇ + mvG
+ IGz ϑ̇2
2
2
2
| {z } |
{z
}
asta
disco
9
1 1
11
1
1
=
mR2 ϑ̇2 + mR2 ϑ̇2
sin2 ϑ + cos2 ϑ +
mR2 ϑ̇2
2 2
2
4
4
2 12
5
2
2 2
2 2
=
mR ϑ̇ + mR ϑ̇ sin ϑ .
12
. Per determinare la forza F (t) usiamo il Teorema dell’energia cinetica Ṫ = Π.
Ṫ =
5
mR2 ϑ̇ϑ̈ + 2mR2 ϑ̇ϑ̈ sin2 ϑ + 2mR2 ϑ̇3 sin ϑ cos ϑ .
6
Poiché il moto imposto è tale da far ruotare il disco con velocità angolare costante (ϑ̇ = ω0 ); si ha ϑ̈ = 0
e quindi
= 2mR2 ω03 sin ϑ cos ϑ .
Ṫ ϑ̈=0
La potenza delle forze attive è
Π = −F i · vA − mg j · vG = 2F Rϑ̇ sin ϑ − mg
R
ϑ̇ cos ϑ .
2
L’equazione di moto è
Ṫ = Π
2mR2 ω03 sin ϑ cos ϑ = 2F Rω0 sin ϑ − mg
⇒
R
ω0 cos ϑ ,
2
da cui si ricava
1
cos ϑ
mg
+ mRω02 cos ϑ .
4
sin ϑ
. Evidenziamo le forze agenti sui singoli corpi rigidi:
F =
VB
mg
ϑ
HO
VB
HB
HB
F
mg
VO
VA
La reazione HB si calcola scrivendo la prima equazione cardinale, proiettata in direzione x, per la sola
asta:
3
Rx(asta) = −F − HB ,
Qx(asta) = mvGx = − Rϑ̇ sin ϑ
2
3
3 2
3
(asta)
(asta) Q̇x
= − Rϑ̈ sin ϑ − Rϑ̇ cos ϑ ,
Q̇x
= − Rω02 cos ϑ
2
2
2
ϑ̈=0
La reazione vincolare HB è allora
3
1
1
cos ϑ
Rω02 cos ϑ − F = mRω02 cos ϑ − mg
.
2
2
4
sin ϑ
ricorriamo alla seconda equazione cardinale per il disco, scritta rispetto al polo O:
Q̇(asta)
= Rx(asta)
x
Per calcolare VB
(disco)
MOz
Γ̇(disco)
⇒
HB =
(disco)
= −HB R sin ϑ − VB R cos ϑ ,
Γ(disco) = IOz
1
= mR2 ϑ̈ k ,
Γ̇(disco) = 0.
2
ϑ̈=0
ϑ̇ k =
1
mR2 ϑ̇ k
2
Ricaviamo quindi
(disco)
Γ̇(disco) = MOz
⇒
VB = −HB tan ϑ =
1
1
mg − mRω02 sin ϑ .
4
2
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
VII sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica. Dimostrazione ed esempi.
. Analisi dell’atto di moto rigido. Teorema di Mozzi.
Esercizi
Esercizio 1.
ϕ
x
r
y
E
A
D
s
k
P, m
C
B
Il sistema di figura è posto in un piano verticale ed è costituito
da un punto materiale P di massa m che può muoversi lungo
la direzione verticale, da un disco omogeneo di raggio r e massa
trascurabile che può ruotare attorno al suo centro e da un disco di
raggio R e massa M che rotola senza strisciare lungo una parete
verticale. Sul punto P è fissato l’estremo di un filo inestensibile
e di massa trascurabile che si avvolge senza strisciare sui due
dischi. Una molla di costante elastica k collega il centro B del
disco di raggio R con un punto fisso. I tratti liberi del filo e della
molla sono verticali.
Si chiede di:
. scrivere il legame cinematico tra le coordinate s, ϑ e ϕ
introdotte in figura e scrivere la velocità del punto P in
funzione di s e ṡ;
. utilizzando il Principio dei Lavori Virtuali, determinare la
lunghezza della molla all’equilibrio;
. in tale situazione, calcolare le reazioni vincolari in H e la
tensione del filo lungo il tratto CD.
H
M, R
ϑ
Esercizio 2.
O
Il sistema di figura è posto in un piano orizzontale ed è costituito da due aste uguali, OC e AB, omogenee di massa m e
lunghezza ` e da un punto materiale P di massa m. L’asta OC
rimane ortogonale ad AB ed è saldata nel suo estremo C al punto di mezzo dell’asta AB, in modo da formare una ‘figura a T’.
L’estremo O è vincolato a terra mediante una cerniera e il punto
P si muove senza attrito sull’asta AB. Una molla di costante
elastica k collega il punto P con l’asta OC. In assenza di attrito,
si chiede di:
x
ϑ
m, `
y
P, m
s
C
m, `
A
B
. determinare i gradi di libertà del sistema e scrivere la velocità del punto P in funzione delle coordinate ϑ e s indicate
in figura;
. calcolare la funzione di Lagrange, L , del sistema;
. individuare due integrali primi del moto e fornirne
un’interpretazione meccanica;
. sapendo che a t = 0 il sistema è in quiete con s = `/2,
calcolare la velocità angolare di OC quando s = 0.
Soluzioni
Esercizio 1.
. Essendo H il centro di istantanea rotazione del disco di raggio R, si ha vB = Rϑ̇ j = ṡ j; la velocità
angolare del disco è quindi
ṡ
ϑ̇ = .
(1)
R
Per inestensibilità del filo, vale vC = vD da cui ricaviamo,
⇒
vC = 2Rϑ̇ j = vD = rϕ̇ j
ϕ̇ =
2
2R
ϑ̇ = ṡ .
r
r
(2)
La velocità di P è
(2)
vP = −rϕ̇ j = −2ṡ j .
(3)
. Le informazioni ottenute al punto precedente per le velocità tornano utili per calcolare gli spostamenti
virtuali, infatti
(1)
(3)
δyP = −2 δs .
δyB = Rδϑ = δs ,
(4)
Il PLV richiede quindi che sia
(4)
δL = mg δyP + M g δyB − ks δyB = (M − 2m)g δs − ks δs = 0 ,
∀δs .
La lunghezza della molla all’equilibrio è quindi
s=
(M − 2m)g
.
k
(5)
. Per il calcolo delle reazioni vincolari basta isolare il disco di raggio R e imporre l’equilibrio mediante le
equazioni cardinali. Indichiamo con ΦH = HH i + VH j la reazione che il piano verticale esercita sul disco
di raggio R in H e con T = −T j la forza che il filo esercita sul disco in C. Le equazioni cardinali forniscono
il seguente sistema
Rx(disco) = HH = 0
Ry(disco) = VH + M g − Fel − T = VH + M g − ks − T = 0
(disco)
MH
= T 2R + Fel R − M gR = (2T + ks − M g)R = 0 ,
che ha come soluzione (tenendo conto della (5))
HH = 0 ,
VH = −mg .
T = mg ,
Esercizio 2.
. Il sistema ha due gradi di libertà, siano s e ϑ le coordinate libere. Introduciamo un sistema di versori
mobile, solidale con l’asta a T. Più precisamente sia:
• il versore t diretto come (B − A);
• il versore n diretto come (C − O).
Il vettore posizione del punto P è (P − O) = ` n + s t. Osservando poi che
ṫ = −ϑ̇ n ,
ṅ = ϑ̇ t ,
(6)
si ricava la velocità di P :
vP =
d
(6)
(P − O) = ` ṅ + ṡ t + s ṫ = (ṡ + `ϑ̇) t − sϑ̇ n .
dt
. L’energia cinetica è:
T =
1 (OC) 2 1
1 (AB)
1
2
IOz ϑ̇ + mvC
+ ICz ϑ̇2 + mvP2
2
2
2
| {z } |
{z
} |2 {z }
OC
AB
1 1 2 2 1 2 2
=
m` ϑ̇ + m` ϑ̇ +
|2 3 {z
} |2
(7)
OC
punto P
1 1
1 m`2 ϑ̇2 + m (ṡ + `ϑ̇)2 + s2 ϑ̇2
2{z 12
2
} |
{z
}
AB
17 2 2 1 =
m` ϑ̇ + m (ṡ + `ϑ̇)2 + s2 ϑ̇2 ,
24
2
punto P
(7)
dove per calcolare il contributo dell’asta AB abbiamo usato il Teorema di König.
Poiché il sistema si muove in un piano orizzontale, l’unica forza attiva è la forza elastica e il potenziale è
semplicemente dato da
1
U = − ks2 .
2
La funzione di Lagrange è
L =T +U =
1
17 2 2 1 m` ϑ̇ + m (ṡ + `ϑ̇)2 + s2 ϑ̇2 − ks2 .
24
2
2
. Un integrale primo è fornito dall’energia meccanica totale
E =T −U =
1
17 2 2 1 m` ϑ̇ + m (ṡ + `ϑ̇)2 + s2 ϑ̇2 + ks2 = cost.
24
2
2
Un secondo integrale primo si ricava osservando che la lagrangiana non dipende esplicitamente da ϑ e
quindi si conserva il momento cinetico pϑ
pϑ :=
17 2
∂L
=
m` ϑ̇ + m`(ṡ + `ϑ̇) + ms2 ϑ̇ = cost.
12
∂ ϑ̇
Dal punto di vista fisico questo integrale primo rappresenta la conservazione del momento angolare di tutto
il sistema, rispetto al polo O. Ciò si verifica facilmente osservando che il momento delle forze rispetto ad
O di tutto il sistema è nullo e applicando quindi la seconda equazione cardinale.
. Ricaviamo i valori delle costanti del moto, sfruttando le informazioni contenute nel testo a t = 0: s = `/2
e quiete:
1
pϑ = 0.
E
= k`2 ,
8
t=0
t=0
Gli integrali primi sono quindi
1
17 2 2 1 1
m` ϑ̇ + m (ṡ + `ϑ̇)2 + s2 ϑ̇2 + ks2 = k`2 ,
24
2
2
8
17 2
m` ϑ̇ + m`(ṡ + `ϑ̇) + ms2 ϑ̇ = 0 .
12
Nella situazione di interesse, quando s = 0, ricaviamo dalla (9) che
ṡ = −
29
`ϑ̇ ,
12
che sostituita nella (8) fornisce un’equazione nella sola ϑ̇
1
493 2 2
m` ϑ̇ = k`2 ,
288
8
da cui ricaviamo
r
ϑ̇ =
36 k
.
493 m
(8)
(9)
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
VIII sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Riduzione di sistemi di forze, sistemi equivalenti di forze.
. Piccole oscillazioni attorno ad una configurazione di equilibrio stabile.
Esercizi
Esercizio 1. Il sistema di figura è posto in un piano verticale e viene studiato in un riferimento cartesiano
ortogonale (O; x, y). È costituito da un’asta omogenea AB di massa m e lunghezza 4R e da un disco omogeneo
di centro G, massa m e raggio R. L’asta AB è scorrevole senza attrito sull’asse x e il disco rotola senza strisciare
sull’asta AB. Il centro G è vincolato a rimanere fisso, ad una distanza d dall’asse delle y. Una molla di costante
elastica k collega l’estremo A dell’asta con l’origine degli assi. Una coppia antioraria C = C k è applicata al
disco. Si chiede di:
. scrivere il legame tra C e x all’equilibrio;
. calcolare le reazioni vincolari sull’asta in A e in B e la reazione vincolare esercitata sul disco in G;
. detto µ il coefficiente di attrito tra il disco e l’asta, determinare il massimo valore di C affinché il disco
non scivoli.
y
d
C
ϑ
G
x
O
m, R
m, 4R
H
A
B
x
Esercizio 2. Il sistema di figura è posto in un piano verticale e viene studiato in un riferimento cartesiano
ortogonale (O; x, y). È costituito da due aste AB e CD e da un disco di raggio R; disco e aste sono omogenee,
di ugual massa m. L’asta AB è scorrevole sull’asse x, con l’estremo A collegato ad O mediante una molla di
costante elastica k, l’asta CD si appoggia al disco e ad un piolo fisso e liscio posto ad altezza 2R dal suolo.
Il vincolo tra il disco e le aste è di puro rotolamento. Assumendo come coordinate libere le coordinate x e s
indicate in figura, si chiede di:
.
.
.
.
calcolare la velocità del centro G e la velocità angolare del disco;
scrivere la funzione di Lagrange, L , del sistema;
determinare il moto del sistema a partire da una condizione iniziale di quiete con x(0) = x0 e s(0) = s0 ;
calcolare le componenti orizzontali delle forze tra disco e aste durante il moto.
y
C
D
m
E
s
G
m, R
x
O
m
A
B
x
Soluzioni
Esercizio 1.
. Il problema si risolve ugualmente bene utilizzando le equazioni cardinali, il PLV o il Teorema di stazionarietà del potenziale. Scegliamo di usare le equazioni cardinali. A tal fine, risulta comodo evidenziare le
forze che agiscono su ciascun sottosistema.
C
HG
mg
HH
d−x
VH
HH
kx
VH
mg
VA
VB
Il seguente sistema di due equazioni cardinali fornisce il legame tra C e x
(
(
(disco)
MG
= C − HH R = 0
C = kxR
⇒
(AB)
HH = kx
= HH − kx = 0
Rx
.
Per illustrare un metodo alternativo, risolviamo il primo punto anche con il Teorema di stazionarietà del
potenziale. Il potenziale è
1
U = Cϑ − kx2 .
(1)
2
Poiché il sistema è ad 1 g.d.l. dobbiamo trovare il legame cinematico tra x e ϑ. La velocità del punto
di contatto H, in virtù del puro rotolamento, è vH = ẋ i. Per la formula fondamentale dell’atto di moto
rigido abbiamo
vG = vH + ϑ̇ k × (G − H) = ẋ i + Rϑ̇ k × j = (ẋ − Rϑ̇) i .
Poiché il centro G è fisso, deve essere vG = 0; ricaviamo quindi
ẋ = Rϑ̇ ,
x = Rϑ + K ,
essendo K una costante di integrazione. Sostituendo nell’espressione del potenziale (1) e trascurando i
termini costanti, si ottiene
x
1
U = C − kx2 .
R 2
Derivando il potenziale e ponendo a zero la derivata si ottiene infine il legame tra C e x all’equilibrio:
U 0 (x) =
C
− kx = 0 ,
R
⇒
C = kxR .
. A differenza del punto precedente, per calcolare VA e VB dobbiamo conoscere dove il disco si appoggia
sull’asta AB. Poiché il centro è fisso a distanza d dall’asse y, si ricava HA = d − x. L’equilibrio verticale
del disco fornisce immediatamente VH = mg, per cui abbiamo
(
(AB)
VA = mg 6R − d + x
Ry
= VA + VB − VH − mg = VA + VB − 2mg = 0
4R
⇒
(AB)
2R + d − x
MA
= VB 4R − VH (d − x) − mg2R = VB 4R − mg(2R + d − x) = 0
VB = mg
.
4R
Per calcolare HG possiamo scrivere la prima equazione cardinale per il solo disco, in direzione x: HG =
HH = kx.
. Basta richiedere che sia soddisfatta la relazione di Coulomb-Morin per l’attrito statico:
|HH | ≤ µ|VH | .
Nel caso specifico si ha kx ≤ µmg. Sfruttando il risultato precedente kx = C/R, si ottiene infine
C ≤ µmgR .
Esercizio 2.
. Il sistema ha due gradi di libertà, il testo suggerisce di usare le coordinate libere x e s. Il vettore
posizione del punto G è (G − O) = (x + s) i, la velocità è quindi vG = (ẋ + ṡ) i. Poiché è anche
vG = vH + ω × (G − H) = ẋ i + Rω i, si ricava che la velocità angolare del disco è
ω=−
ṡ
k.
R
Analogamente, indicando con K il punto di contatto del disco con l’asta CD, si trova
vK = ẋ i + ω × (K − H) = (ẋ + 2ṡ) i .
. L’energia cinetica è:
T =
ṡ 2
1
1
1
1
1 (disco) 2
1
1
11
2
mẋ2 + m(ẋ + 2ṡ)2 + mvG
+ IGz
ω = mẋ2 + m(ẋ + 2ṡ)2 + m(ẋ + ṡ)2 +
mR2
2
2
2
2 2
R
{z
} |2
{z
} 2
|2 {z } |2
AB
CD
disco
11
3
= mẋ2 + mṡ2 + 3mẋṡ .
2
4
Il potenziale è: U = − 12 kx2 .
Infine, la funzione di Lagrange è
L =T +U =
3
11
1
mẋ2 + mṡ2 + 3mẋṡ − kx2 .
2
4
2
. Per trovare il moto scriviamo le equazioni di Lagrange.
d
d ∂L =
3mẋ + 3mṡ = 3mẍ + 3ms̈
dt ∂ ẋ
dt
∂L
= −kx
∂x
11
d ∂L
d 11
=
mṡ + 3mẋ =
ms̈ + 3mẍ
dt ∂ ṡ
dt 2
2
∂L
= 0.
∂s
Arriviamo quindi alle seguenti equazioni di moto
3ẍ + 3s̈ +
k
x = 0,
m
11s̈ + 6ẍ = 0 .
(2)
Ricavando s̈ dalla seconda e sostituendo nella prima si ricava un’equazione nella sola x che può essere
semplificata nell’equazione seguente (oscillatore armonico)
ẍ + Ω2 x = 0 ,
Ω2 =
11k
.
15m
(3)
La soluzione, con le condizioni iniziali x(0) = h e ẋ(0) = 0, è x(t) = h cos Ωt. L’andamento di s(t) si ricava
dalla seconda delle (2)
11s̈ + 6ẍ = 0
⇒
s(t) = −
6
x(t) + At + B ,
11
essendo A e B costanti di integrazione da determinarsi mediante le condizioni iniziali s(0) = a, ṡ(0) = 0.
Si arriva infine a
6h
s(t) = a +
(1 − cos Ωt) .
11
. Dette ΦH = −HH i − VH j e ΦK = HK i + VK j le reazioni vincolari che agiscono rispettivamente sull’asta
AB e sull’asta CD nei punti di contatto con il disco, il quesito si risolve facilmente scrivendo la prima
equazione cardinale della dinamica per AB e per CD, proiettate in direzione x:
(
(
(AB)
(AB)
Q̇x
= Rx
mẍ = −kx − HH
⇒
(4)
(CD)
(CD)
m(ẍ + 2s̈) = HK .
Q̇x
= Rx
Semplificando e tenendo conto dei legami tra ẍ, s̈ con x, che si ricavano dalle equazioni (2)–(3), si ottiene
infine
1
4
HK =
kx .
HH = − kx ,
15
15
Università degli Studi eCampus
Facoltà di Ingegneria
Meccanica razionale e statica
Prof. S. Turzi
VIII sessione 2012, compito B
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Riduzione di sistemi di forze, sistemi equivalenti di forze.
. Piccole oscillazioni attorno ad una configurazione di equilibrio stabile.
Esercizi
Esercizio 1. Il sistema di figura è posto in un piano verticale e viene studiato in un riferimento cartesiano
ortogonale (O; x, y). È costituito da un’asta omogenea AB di massa m e lunghezza 4R e da un disco omogeneo
di centro G, massa m e raggio R. L’asta AB è scorrevole senza attrito sull’asse x e il disco rotola senza strisciare
sull’asta AB. Il centro G è vincolato a rimanere fisso, ad una distanza d dall’asse delle y. Una molla di costante
elastica k collega l’estremo A dell’asta con l’origine degli assi. Una coppia antioraria C = C k è applicata al
disco. Si chiede di:
. scrivere il legame tra C e x all’equilibrio;
. calcolare le reazioni vincolari sull’asta in A e in B e la reazione vincolare esercitata sul disco in G;
. detto µ il coefficiente di attrito tra il disco e l’asta, determinare il massimo valore di C affinché il disco
non scivoli.
y
d
C
ϑ
G
x
m, R
m, 4R
H
O
A
B
x
Esercizio 2. Il sistema di figura è posto in un piano verticale e viene studiato in un riferimento cartesiano
ortogonale (O; x, y). È costituito da un’asta omogenea AB di massa m e da un disco omogeneo di raggio R
e massa m. L’asta si appoggia in K al disco e ad un piolo fisso D posto ad altezza 2R dal suolo. Il disco
rotola senza strisciare su una guida fissa, scelta come asse delle x. Il vincolo tra il disco e l’asta AB è di puro
rotolamento, mentre il piolo D è liscio. L’estremo A dell’asta è collegato mediante una molla di costante elastica
k ad un punto A0 posto sull’asse delle y alla stessa quota di A. Assumendo x come coordinata libera (indicata
in figura), si chiede di:
.
.
.
.
esprimere il legame cinematico tra le coordinate x e ϑ ;
scrivere la funzione di Lagrange, L , del sistema;
determinare il moto del sistema a partire da una condizione iniziale di quiete con x(0) = x0 ;
calcolare la componente orizzontale della forza tra il disco e l’asta durante il moto.
y
x
0
A
m
A
K
m, R
O
C
H
D
B
ϑ
x
Soluzioni
Esercizio 1.
. Il problema si risolve ugualmente bene utilizzando le equazioni cardinali, il PLV o il Teorema di stazionarietà del potenziale. Scegliamo di usare le equazioni cardinali. A tal fine, risulta comodo evidenziare le
forze che agiscono su ciascun sottosistema.
C
HG
mg
HH
d−x
VH
HH
kx
VH
mg
VA
VB
Il seguente sistema di due equazioni cardinali fornisce il legame tra C e x
(
(
(disco)
MG
= C − HH R = 0
C = kxR
⇒
(AB)
HH = kx
= HH − kx = 0
Rx
.
Per illustrare un metodo alternativo, risolviamo il primo punto anche con il Teorema di stazionarietà del
potenziale. Il potenziale è
1
U = Cϑ − kx2 .
(1)
2
Poiché il sistema è ad 1 g.d.l. dobbiamo trovare il legame cinematico tra x e ϑ. La velocità del punto
di contatto H, in virtù del puro rotolamento, è vH = ẋ i. Per la formula fondamentale dell’atto di moto
rigido abbiamo
vG = vH + ϑ̇ k × (G − H) = ẋ i + Rϑ̇ k × j = (ẋ − Rϑ̇) i .
Poiché il centro G è fisso, deve essere vG = 0; ricaviamo quindi
ẋ = Rϑ̇ ,
x = Rϑ + K ,
essendo K una costante di integrazione. Sostituendo nell’espressione del potenziale (1) e trascurando i
termini costanti, si ottiene
x
1
U = C − kx2 .
R 2
Derivando il potenziale e ponendo a zero la derivata si ottiene infine il legame tra C e x all’equilibrio:
U 0 (x) =
C
− kx = 0 ,
R
⇒
C = kxR .
. A differenza del punto precedente, per calcolare VA e VB dobbiamo conoscere dove il disco si appoggia
sull’asta AB. Poiché il centro è fisso a distanza d dall’asse y, si ricava HA = d − x. L’equilibrio verticale
del disco fornisce immediatamente VH = mg, per cui abbiamo
(
(AB)
VA = mg 6R − d + x
Ry
= VA + VB − VH − mg = VA + VB − 2mg = 0
4R
⇒
(AB)
2R + d − x
MA
= VB 4R − VH (d − x) − mg2R = VB 4R − mg(2R + d − x) = 0
VB = mg
.
4R
Per calcolare HG possiamo scrivere la prima equazione cardinale per il solo disco, in direzione x: HG =
HH = kx.
. Basta richiedere che sia soddisfatta la relazione di Coulomb-Morin per l’attrito statico:
|HH | ≤ µ|VH | .
Nel caso specifico si ha kx ≤ µmg. Sfruttando il risultato precedente kx = C/R, si ottiene infine
C ≤ µmgR .
Esercizio 2.
. La velocità del punto K del disco è vK = 2Rϑ̇ i (formula fondamentale dell’atto di moto rigido applicata
al disco). Per puro rotolamento deve anche essere vK = ẋ i. Si ricava quindi
ẋ = 2Rϑ̇ .
(2)
. L’energia cinetica è:
T =
ẋ 2
1 (disco) (2) 1
11
1
11
=
mẋ2 + IHz ω 2 = mẋ2 +
mR2 + mR2
mẋ2 .
2
2
2
2
2
2R
16
{z
}
| {z } |
AB
disco
Il potenziale è: U = − 21 kx2 .
Infine, la funzione di Lagrange è L = T + U =
11
mẋ2 − 21 kx2 .
16
. Per trovare il moto scriviamo le equazioni di Lagrange. Si trova
d ∂L 11
=
mẍ ,
dt ∂ ẋ
8
∂L
= −kx;
∂x
semplificando arriviamo alla seguente equazione di moto
ẍ + Ω2 x = 0 ,
Ω2 =
8k
,
11m
(3)
la cui soluzione, con le condizioni iniziali x(0) = x0 , ẋ(0) = 0, è x(t) = x0 cos Ωt.
. Detta ΦK = HK i + VK j la reazione vincolare che agisce sull’asta AB nel punto di contatto con il disco,
il quesito si risolve facilmente scrivendo la prima equazione cardinale della dinamica per AB, proiettate
in direzione x:
Q̇(AB)
= Rx(AB)
x
⇒
mẍ = −kx + HK .
(4)
Semplificando e tenendo conto del legame tra ẍ e x, che si ricava dall’equazione di moto (3), si ottiene
HK = kx −
8k
3
x=
kx .
11
11