Grandezze periodiche e grandezze alternate.
Una grandezza y(t), funzione del tempo, si dice periodica se assume gli stessi valori,
nello stesso ordine, ad intervalli di tempo uguali, detti periodi.
In altri termini una grandezza si dice periodica di periodo T quando esiste un valore
finito di tempo T tale per cui la grandezza soddisfa per un t qualunque la condizione:
Y(t)=Y(t + kT )
con k intero qualsiasi.
Come si vede la grandezza Y(t) è periodica appunto perché assume valori uguali per
intervalli di tempo uguali ( al variare di T ), a partire dall’istante iniziale.
f
1
T
Il numero di periodi contenuti nell’unità di tempo si chiama frequenza per cui
Valore medio
Dicesi valore medio in un periodo T di una grandezza periodica il numero:
Ym
1 t T
t Y t dt
T
Si può anche definire il valore medio di Y(t) in una frazione qualsiasi del periodo
come:
Ym ,
1
0 Y t dt
L’integrale precedente esprime l’area totale che la curva rappresentante la funzione Y
data determina con l’asse orizzontale entro l’intervallo di tempo T, e ciò a partire da
un qualunque istante t.
1
Perciò geometricamente il valore medio è l’altezza di un rettangolo avente area pari a
quella racchiusa dalla curva Y(t) ( in un periodo) e base T.
Valore efficace
Dicesi valore efficace di una qualunque grandezza periodica Y(t) il numero:
Yeff
1 t T 2
t Y t dt
T
E’ interessante osservare che i valori di ym e yeff sono indipendenti dall’istante
prescelto come origine del periodo. Invece, il valore ym dipende dagli estremi
dell’intervallo considerato.
Questo è importante per la determinazione del valore medio in una semionda.
Fattore di forma
Il rapporto tra valore efficace in un periodo e valore medio in un periodo è detto
fattore di forma della grandezza periodica considerata.
1 t T 2
t Y t dt Y
eff
T
=
1 t T
Ym
t Y t dt
T
Grandezze alternate
Le grandezze alternate sono quelle particolari grandezze periodiche che presentano
nel periodo T valore medio nullo (Ym=0).
Una funzione alternata dovrà quindi essere rappresentata da una curva la quale, in un
intervallo di tempo uguale al periodo T determina rispetto all’asse dei tempi aree
positive uguali a quelle negative. Tuttavia molte volte per queste grandezze si
considera un altro valore medio, precisamente il valore medio in un semiperiodo:
2
Ym
2 T
02 Y t dt
T
Si noti che per il calcolo dell’integrale l’origine del tempo non è più qualunque, ma
quel particolare valore che rende massimo il valore dell’integrale stesso.
Nel caso in cui per la grandezza alternata data si possa definire un valore medio nel
semiperiodo, allora questo è utile per definire il cosiddetto fattore di forma ; esso,
infatti, risulta uguale al rapporto tra il valore efficace Yeff ed il valore medio in un
semiperiodo Ym (nel caso particolare in cui le semionde sono uguali).
Si osservi da ultimo che il valore efficace di una grandezza alternata qualunque
2
sempre è diversa da zero, perché la curva Y t è costantemente positiva, cioè la
radice quadrata della media dei quadrati dei valori istantanei in un periodo (o in un
numero intero di periodi).
Osservazione:
Il valore efficace di solito è maggiore del valore medio ( Yeff Ym )
I valori Ym e Yeff sono indipendenti dall’istante prescelto come origine del periodo,
invece il valore Ym , dipende dagli estremi dell’intervallo considerato.
In elettrotecnica, il valore efficace di una corrente (tensione) viene definito anche
come quel valore che dovrebbe presentare l’intensità di corrente (tensione)
continua circolante (applicata) nello stesso circuito resistivo per produrvi, a parità
di tempo, per effetto Jaule, la stessa quantità di calore determinata dalla grandezza
periodica.
Fattore di forma
Il rapporto tra il valore efficace in un periodo e il valore medio in un periodo è detto
fattore di forma della grandezza periodica considerata:
3
1 t T 2
t Y t dt Y
eff
T
=
1 t T
Ym
t Y t dt
T
Valore medio in una semionda
Per le grandezze alternate che presentano non più di due passaggi per lo zero in un
ogni periodo, si può definire il concetto di valore medio in una semionda cioè il
valore medio della grandezza nell’intervallo tra due successivi passaggi per lo zero.
Nel caso in cui le due semionde sono uguali si parla di valore medio nel semiperiodo.
Per le grandezze alternate il fattore di forma si definisce come rapporto tra il valore
efficace e il valore medio in una semionda.
Grandezze sinusoidali
Una grandezza si dice sinusoidale quando la curva che ne visualizza l’andamento nel
tempo presenta la forma sinusoidale.
Detti YM il valore massimo e T il periodo, il valore istantaneo Y(t) di questa grandezza
sinusoidale è esprimibile analiticamente nel seguente modo:
1.
Y t YM sen
2
t (espressione analitica di una grandezza sinusoidale di fase zero)
T
Proprietà delle grandezze sinusoidali
4
a) Il valore massimo positivo è uguale al valore massimo negativo; si può quindi
parlare semplicemente di valore massimo o ampiezza YM.
b) Per una grandezza sinusoidale si introduce il valore medio nel semiperiodo e tale
valore medio è un rapporto definito con il valore massimo, infatti:
Y t YM cos t
Ym
Calcoliamo l’integrale tre
due zeri del
(nel semiperiodo)
T
3
T
e T (che corrisponde al semiperiodo
preso tra
4
4
2
coseno) si ha:
Ym
2 T
02 Y t dt
T
3
T
4
Y 2 T
1
1
sent
M
YM cost dt YM
T
T
T 2
T
4
2
2
3
T
4
T
4
2
sen T
3
T
4
t
T
4
YM
3
2
sen sen YM
2
2
siccome interessa il valore assoluto del risultato (perché il valore medio in un
semiperiodo si calcola nel semiperiodo in cui la funzione è positiva) allora:
2
Ym Y M
Ym
2
YM
c) Il valore efficace della grandezza sinusoidale è pure in rapporto con il valore
massimo:
Yeff
1 T 2
1 T 2
2
0 Y t dt
0 YM cos t
T
T
dalla trigonometria si ha:
cos 2 2 cos 2 1 cos 2
Y 2 t YM2 cos 2t YM2
1 cos 2
2
per cui:
1 cos2t 2
2
5
Notiamo che il quadrato non è più una grandezza alternata ma è sempre positiva.
Inoltre la grandezza è sempre periodica, però la frequenza risulta raddoppiata
rispetto a quella iniziale (e quindi il periodo è dimezzato).
La curva risulta regolare e integrabile:
YM2
1 T 2 1 cos2t 2
Y 0 YM
dt
T
2
2T
2
eff
YM2
2T
sen2T 2 sen 2
T
2
2
essendo la funzione periodica
YM2
Y
2
2
eff
Yeff
sen2t 2
t
2
0
T
sen2T 2 sen 2
quindi:
2
2
YM
2
d) Il fattore di forma che confronta il valore efficace ed il valore medio pertanto vale:
f
Yeff
Ym
YM 2
1,111
2 YM 2 2
Una grandezza sinusoidale è dunque definita completamente da tre elementi
caratteristici, noti i quali si conosce tutto della grandezza:
1. Ampiezza YM (oppure il valore efficace o il valore medio)
2. Frequenza f (oppure periodo T oppure pulsazione ω )
3. Fase φ (o la differenza di fase rispetto ad un’altra grandezza sinusoidale nota)
Relazioni tra grandezze sinusoidali
Si abbiano due grandezze sinusoidali isofrequenziali a e b
a AM sent
b BM sen t
6
dove AM e BM sono le rispettive ampiezze, e le rispettive fasi.
La differenza tra le due grandezze assume un ben preciso significato
indipendente dall’istante iniziale di riferimento.
si dice che la grandezza a è in anticipo di fase rispetto a
0
Quando
b poiché raggiunge prima della grandezza b il valore massimo.
si dice che a è in ritardo di fase rispetto a b.
Se invece 0
Se
0
Se
Se
si dice che le due grandezze sono in fase.
le due grandezze si dicono in quadratura.
2
le due grandezze si dicono in opposizione.
L’angolo viene chiamato anche angolo di sfasamento fra le due grandezze date.
Metodo simbolico o di Steinmetz
Rappresentazione di grandezze sinusoidali isofrequenziali mediante numeri
complessi.
Osservazione:Una funzione sinusoidale è univocamente determinata da una coppia
ordinata di numeri reali (AM, ); quindi, essendo per definizione un numero
complesso una coppia ordinata di numeri reali, è possibile stabilire una
corrispondenza buinivoca fra l’insieme dekke funzioni sinusoidali di pulsazione e
l’insieme dei numeri complessi.
Tale corrispondenza conserva le operazioni din somma, prodotto per una costante,
derivazione. Si stabilisce allora un “isoformismo tra spazi che perà non sono unitari
ne discende che si tratta di uno “pseudoisorfismo”.
(Questo perchè l’ordinaria moltiplicazione di funzioni sommabili non è definibile
come prodotto scalare).
AM sen (t )
(a,b)
7
a f ( AM , )
b g ( AM , )
~
a f 1 ( AM , )
~ 1
b g ( AM , )
f e g si scelgono in modo tale da rendere semplici le operazioni corrispondenti nel
campo dei numeri complessi.
Occorre stabilire le leggi dell’isomorfismo tra i due spazi.
Se si sceglie la rappresentazione algebrica
(a,b)=a+jb
a kAM cos( 0 )
b kAM sen ( 0 )
a2 b2
A
M
K
arctg b
0
a
K e 0 costanti reali arbitarie.
RICHIAMI SUI NUMERI COMPLESSI
Per numero complesso si intrende una coppia odinata di numeri reali:
z a+jb dove a prende il nome di parte reale e b di parte immaginaria.
La notazione di cui ci si è serviti per definire il numero complesso z è nota come
rappresentazione in coordinate rettangolari o algebrica.
8
La rappresentazione esponenziale o polare del numero complesso z è:
z = Aej
dove A e rappresentano, rispettivamente, il modulo e l’argomento del numero
complesso z .
A partire da semplici considerazioni geometriche è facile dimostrare le relazioni che
permettono di passare dall’una all’altra rappresentazione:
a A cos
b Asen
A a 2 b2
b
arctg
a
Queste definizioni sono illustrate nella figura seguente, dove risulta anche chiaro che
il numero complesso z è associato al vettore bidimensionale che ha per coordinate
a=Re( z ) e b=Im( z )
Complesso coniugato
Dato il numero complesso z =a+jb, si dice che
ẑ = a-jb
è il complesso coniugato del numero z
Se ẑ è il complesso coniugato del numero complesso z
zˆ z
zˆ z arg zˆ arg z
9
Operazioni con i numeri complessi
Le regole riguardanti i numeri complessi sono identiche a quelle per i numeri
reali, tenendo conto che j2=-1.
Le operazioni con i numeri complessi sono definite come segue:
z1 z 2 (a1 a 2 ) j ( b1 b 2 )
Somma
z1z 2 A1A 2 e j(1 2 )
Pr odotto
Inverso
z11 A11e j
METODO DEI FASORI
Si consideri una sinusoide di frequenza angolare :
y (t)=YMcos(t+)
Ad una tale funzione è possibile associare la funzione complessa :
YMcos(t+)+ jYMsen(t+)
Che, ricordando la definizione di esponenziale complesso, si può scrivere
sinteticamente:
YMej(t+)
Al variare di t la precedente relazione descrive sul piano complesso una curva i cui
punti distano YM dell’origine descrivendo una circonferenza.
Inoltre l’angolo formato dalla congiungente il punto con l’origine aumenta
linearmente col tempo, partendo da un valore iniziale e ritornandovi
periodicamente ogni T
2
.
Tale relazione individua, dunque, un vettore rotante con velocità angolare .
10
Tale vettore può esprimersi come:
YM ej(t+)= YM ejt ej
Delle due parti in cui esso si può scomporre, dal momento che è nota la frequenza
angolare, quella chè è indispensabile conoscere per potere individuare la sinusoide è
YM ej
Il numero complesso Y YMe j
si chiama fasore e permette di risalire alla funzione del tempo y(t) visto che operiamo
con grandezze isofrequenziali.
e jt ]
y( t ) Re[ Y
Il fasore può esprimersi in forma cartesiana o polare
Y YM
( si noti convenzione diversa! )
angolo di fase del fasore
Y YM e j
Y a jb
YM a 2 b 2
b
tg
a
Noto il fasore si può subito risalire alla grandezza sinusoidale rappresentata (a
seconda della rappresentazione prescelta) moltiplicando per ejt e poi considerando la
parte reale o la parte immaginaria, a seconda della rappresentazione prescelta.
e jt
y ( t ) Re Y
oppure
La funzione complessa di variabile t:
11
y(t ) Ye jt
La rappresentazione di grandezze sinusoidali mediante funzioni complesse viene
usata soprattutto nel calcolo di soluzioni particolari di equazioni differenziali lineari
ordinarie a coefficienti costanti reali quando la funzione forzante è di tipo
sinusoidale.
Supponendo di scegliere come base una funzione coseno cioè y(t)= YM cos(t+)
Comportamento di RLC nei confronti di grandezze alternate a regime
sinusoidale
Nell’ipotesi di elementi lineari tempo-invarianti:
Resistori R
Sia
i(t)=IMcos(t+)
V(t)=Ri(t)
V(t)=R IMcos(t+)
Quindi anche la tensione è anch’essa una grandezza alternata sinusoidale.
Vediamo ora che relazioni intercorrono tra le due grandezze caratteristiche, cioè
valore massimo e fase della tensione e della corrente.
VM=R IM
Allora la relazione che vale per i valori istantanei vale anche per i valori massimi.
La differenza di fase
v I 0
12
che afferma che tensione e corrente sono in fase.
Induttore L
Sia
i(t)= IMcos(t+)
La tensione ai capi dell’induttore è data da:
v(t ) L
v(t)= L
di(t )
dt
d
I M cos(t ) LI Msen(t ) LI Msen(t )
dt
2
Vediamo ora che relazioni intercorrono tra le due grandezze caratteristiche, cioè
valore massimo e fase della tensione e della corrente.
VM=LIM
Allora la relazione che vale per i valori istantanei vale anche per i valori massimi.
La differenza di fase
v I
cioè la tensione ai capi di L è in anticipo di fase di
2
rispetto alla corrente.
2
Capacitore C
Sia
v(t)= VMcos(t+)
La corrente ai capi del capacitore è data da:
i(t ) L
dv(t )
dt
per cui
13
i(t)= C
d
VMcos(t ) CVMsen(t ) CVMcos(t )
dt
2
Vediamo ora che relazioni intercorrono tra le due grandezze caratteristiche, cioè
valore massimo e fase della tensione e della corrente.
IM=CVM
VM
1
IM
C
Allora la relazione che vale per i valori istantanei vale anche per i valori massimi.
La differenza di fase
v I
cioè la tensione ai capi di C è in ritardo di fase di
2
rispetto alla corrente.
2
Si noti che la relazione fra le ampiezze massime della corrente e della tensione nel
caso del condensatore e dell’induttore ha una forma diversa rispetto a quella
istantanea e ciò è dovuto al fatto che la tensione(o la corrente) dipendono dalla
rapidità con cui varia la corrente(o la tensione) cioè da .
Tensione e corrente ai capi di R.
La corrente e la tensione sono in fase tra loro e si ottengono l’una dall’altra
semplicemente cambiando la scala.
Tensione e corrente ai capi di L.
v I
2
14
significa che la tensione è in anticipo di fase di
corrente è in ritardo di
sulla corrente(ovvero che la
2
rispetto alla tensione).
2
Nel diagramma, per ottenere la tensione rispetto al grafico della corrente ci si deve
spostare di
verso sinistra;
2
(Infatti, si tratta di una traslazione nel tempo con aggiunta di
che equivale ad uno
2
spostamento della forma d’onda verso sinistra), inoltre bisogna moltiplicare i valori
della corrente per L.
Tensione e corrente ai capi di C.
v I
significa che la tensione è in ritardo di fase di
è in anticipo di
2
sulla corrente(ovvero che la corrente
2
rispetto alla tensione).
2
Nel diagramma, per ottenere la corrente rispetto al grafico della tensione ci si deve
spostare di
verso sinistra;
2
(Infatti, si tratta di una traslazione nel tempo con aggiunta di
che equivale ad uno
2
spostamento della forma d’onda verso sinistra), inoltre bisogna moltiplicare i valori
della corrente per
1
.
C
15
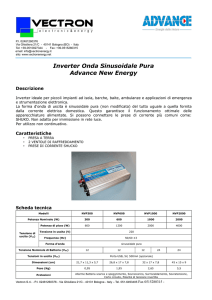
Collegamenti in serie e in parallelo
Consideriamo n elementi di circuito collegati in serie. Nel regime sinusoidale ad una
data frequenza ciascun elemento sarà caratterizzato da un’impedenza Z i i= 1…n
I
V1
Z1
I1
V2
Z2
I2
Vn
Zn
In
V
Fig. 1
LKC:
I I1 I2 ... In
LKT:
V V1 V2 ... Vn
V Z i Ii
n
V Z i I
Z j Z i j
n
i 1
i 1
(impedenza del bipolo)
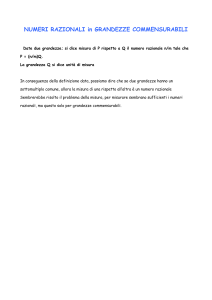
Consideriamo adesso semplici elementi di circuito collegati in parallelo:
I
+
I
I
2
I
1
Y1
Y2
In
Yn
_
Fig. 2
LKC:
I I1 I2 ... In
LKT:
V V1 V2 ... Vn
16
I YiVi
n
I YiV
i 1
Y j Yi j (ammettenza del bipolo in parallelo)
n
i 1
17
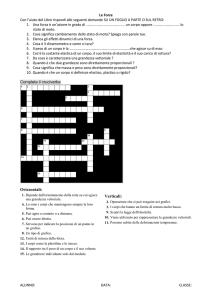
Potenza in regime sinusoidale
Data una rete lineare tempo invariante accessibile da una porta, la potenza entrante (uscente) nella
rete attraverso la porta è univocamente definita mediante le grandezze di porta v(t) e i(t):
p(t)= v(t) i(t)
i(t)
Rete lineare
v(t)
tempo invariante
Fig. 3
In caso di funzionamento in regime sinusoidale le grandezze v(t) ed i(t) sono
sinusoidali
Sia allora:
vt VM cost V
it I M cost I
La potenza istantanea p(t) è una funzione periodica ma, almeno in generale,
non è né alternata, né sinusoidale :
I
1 I
2 ... I
n
I
1
1
VM I M cost V t I cost V t I
2
2
1
V M I M cos V I cos2t V I
2
posto V I (angolo di sfasamento tra v(t) e i(t) ) si ha :
1
pt V M I M cos cos2t 2 V
2
18
introducendo i valori efficaci di v(t) e i(t) ossia: V
V I
1
VM I M M M VI
2
2 2
VM
2
I
IM
2
si ha:
per cui:
pt VI cos VI cos 2t 2 V
oppure
1
pt V M I M cos cos2t 2 V
2
Da questa espressione si vede che la potenza istantanea assorbita si compone di due
contributi:
1
uno costante rispetto al tempo VI cos ( VM I M cos );
2
l’altro variabile nel tempo con legge cosinusoidale, di pulsazione raddoppiata rispetto
a quella dei generatori della rete ( ovvero di periodo raddoppiato); questo secondo
termine viene detto potenza fluttuante.
D’altronde ciò che caratterizza il fluire dell’energia dal generatore alla rete
considerata è il valore medio della potenza istantanea, quindi il valore medio dei due
termini che compaiono nell’espressione precedente.
Si vede subito che il contributo della potenza fluttuante è nullo poichè una grandezza
sinusoidale ha sempre un integrale nullo su ciascun periodo.
La media risulterà dunque pari al termine costante che coincide perciò con la potenza
attiva.
(potenza media)
P
1 T
0 p(t )dt VI cos
T
( potenza attiva o reale)
Questa è la potenza elettrica assorbita dalla rete, più precisamente è la potenza
elettrica che si trasforma in altra potenza.
Al termine cos si dà il nome di fattore di potenza.
Esso ha la caratteristica di essere positivo (poiché si considera il caso di potenza
assorbita, mentre è negativo nel caso di potenza generata) sia per corrente in ritardo
sia in anticipo, di essere uguale ad uno quando la corrente è in fase con la tensione,
19
altrimenti di essere sempre inferiore ad uno per raggiungere ile valore zero nelle
condizioni di corrente in quadratura .
2
2
Potenza attiva e reattiva
Si consideri il caso in cui la fase della tensione sia nulla.
Le espressioni per le grandezze caratteristiche saranno:
v(t)= VMcost
i(t)=IMcos(t-)
L’espressione della potenza elettrica istantanea:
pt VM I M cost[cost cos sentsen ]
VM I M t[cos2t cos sentostsen ]
VM I M
[cos2t cos sentostsen ]
2
pt VI cos (VI cos ) cos 2t (VIsen ) sen 2t
il termine VI cos (VI cos ) cos 2t rappresenta la potenza attiva istantanea;
il termine VIsensen 2t rappresenta la potenza reattiva istantanea.
In conclusione:
pt p a t p r t P1 cos 2t Qsen 2t
in cui P VI cos si dice potenza attiva della rete
Q VIsen si dice potenza reattiva della rete e si misura in VAR (voltampere
reattivo).
La potenza istantanea è quindi individuata completamente se si conoscono P e Q.
20
Questa scomposizione della parte alternata della potenza istantanea permette di
evidenziare due componenti a valore medio nullo, caratterizzate da un
comportamento opposto al variare di .
Si noti che l’angolo è l’angolo caratteristico dell’impedenza e non del circuito
d’ingresso.
Osservazione sul significato di Q
Fissata la tensione V, è possibile considerare la decomposizione del fasore della
corrente in due conponenti, una in fase con la tension, l’altra in quadratura.
La potenza attiva si può anche esprimere con la formula: P VI a ove Ia è la
componente della corrente in fase con la tensione applicata.
Ciò suggerisce l’idea che a determinare la potenza attiva nel circuito sia pertanto tale
componente. Per questo motivo Ia viene detta componente attiva della corrente.
Analogamente la componente della corrente in quadratura con la tensione indicata
con Ir è detta componente reattiva della corrente.
Ora questa componente I r I sen non può ovviamente dar luogo a lavoro, o meglio,
non può determinare con continuità un trasferimento di energia dal generatore al
circuito utilizzatore (p(t) ha valore medio nullo). La potenza reattiva, dunque, non è
fisicamente una potenza; il suo significato è legato all’energia complessivamente
scambiata fra il circuito ed i campi nello spazio che, per quanto detto, nel corso di un
intero periodo, é nulla.
Ciò conferma il carattere conservativo dell’energia che si accumula nei campi
elettrico e magnetico, in quanto, alla fine di ogni periodo, il saldo degli scambi
alternati di potenza fra essi ed il circuito è zero. (Mettere migliore motivazione)
Osservando ancora l’espressione di Q ci si accorge che la potenza reattiva cambia
segno al variare del segno dell’angolo di sfasamento, risulta positiva quando la
21
corrente si presenta in ritardo sulla tensione, quindi per i circuiti induttivi (in questo
caso 0 ), risulta negativa in caso contrario (circuiti capacitivi).
Inoltre, se si considerano due correnti, aventi la stessa componente in fase, ma
diversa in quadratura, sono distinguibili perchè danno luogo alla stessa P ma a Q
distinte.
Potenza complessa
Un modo semplice per calcolare la potenza media fornita alla rete fa riferimento alla
potenza complessa così definita:
A P jQ VI cos jVIsen VI cos jsen Ae j
A A VI si chiama potenza apparente e si misura in voltampere.
La potenza complessa può essere definita a partire dai fasori V e I .
Se V Ve j I Ie j
A V I Ve j Ie j VIe j VIe j
A è chiamata anche potenza di dimensionamento perché tiene conto dei limiti di
funzionamento delle apparecchiature elettriche.
Si nota ancora che:
A VI P 2 Q 2
arg A z
(argomento dell' impedenza)
Significato della potenza reattiva
Se si considera ancora la potenza istantanea (funzione del tempo) si comprende che
se negli intervalli di tempo in cui la potenza istantanea è positiva il circuito assorbe
energia (e sarà il generatore che lo alimenta a fornirla) di conseguenza negli intervalli
di tempo in cui la potenza istantanea risulta negativa sarà il circuito a fornire energia
elettrica (precisamente la generatore cui è collegato). Ma non deve meravigliare che il
22
circuito in certi istanti fornisca energia al generatore, poiché esso non fa altro che
restituire quell’energia che gli elementi reattivi del circuito avevano immagazzinato
negli istanti precedenti, sotto forma di energia elettrostatica nel caso di un capacitore
o di energia magnetica nel caso di un induttore.
Triangolo delle potenze
Per fissare le idee si consideri un bipolo (circuito) ohmico- induttivo (Q>0 )
Posto il vettore corrente I sull’asse reale per semplicità e comodità, la tensione V
individua un triangolo avente per ipotenusa la stessa tensione V e per cateti
orizzontale e verticale rispettivamente la componente reale V a in fase con la corrente
I , e la componente immaginaria V r in quadratura con la stessa corrente:
V
A
Q
Vr
Va
P
I
(a)
(b)
23
Fig. 4
Moltiplicando ciascun lato del triangolo su menzionato per la quantità scalare I si
passa, ovviamente, dal triangolo delle tensioni (a) al triangolo delle potenze (b) :
precisamente ad un triangolo rettangolo il cui cateto orizzontale rappresenta la
potenza attiva P e l’altro cateto la potenza reattiva Q e l’ipotenusa la potenza
apparente A . Q si disegna per convenzione sempre positivo.
A P 2 Q 2
P A cos
Q Asen
Q
P
P Q cot g
arctg
Q P tan
Potenza in regime sinusoidale per bipoli RLC lineari, tempo invarianti
V2
P VI cos V I RI 2
R
Q0
Resistore ( =0)
Induttore (
2
Capacitore (
0)
P VI cos 0
2
Q VIsen V I X I 2 V
L
XL
A P
A jQ
P VI cos 0
0 ) Q VI sen V I X I 2 V 2 A jQ
C
2
XC
24
Potenza in regime sinusoidale per bipoli di impedenza nota Z
Sia V ZI
V ZI R 2 X 2 I
I Ie j 0
per cui
j
se I 0
V Ve
V Z
V
( I 0 )
I
Z
V
Z R jX
V
I
Re
Fig.5
P VI cos ZI 2 cos Z cos I 2 RI 2
Q VIsen ZI 2 sen Zsen I 2 XI 2
infatti
Z Ze j Z cos j Zsen R jX
ora
V2
R
R
1
P RI 2 R (essendo V ZI ) ma : 2 2
Re ReY
2
Z
R X
Z
Z
2
quindi
P RI 2 V 2 ReY
XV 2
1
Q XI 2 V 2 Im V 2 ImY
Z
Z
2
25
Queste relazioni costituiscono utili risorse per ricavare P e Q note V, Z
ed R
oppure V, Z e X
Casi particolari:
Z =R
X=0
Z =jX
R=0
V2
R
P
V2
Q
X
Q=0
P=0
Conservazione della potenza complessa: Teorema di Boucherot
Per una rete lineare tempo invariante funzionante in regime sinusoidale i fasori Vk ed
I k k=1,2,3…l soddisfano le leggi di Kirchhoff delle correnti e delle tensioni (LKC,
LKT) rispettivamente :
Vk 0 e
k
Ik 0
(LKT , LKC )
k
Vk 0
ma allora vale anche:
k
e I k 0 (LKT ed LKC per le grandezze
k
coniugate)
Per il teorema di Tellegen si può affermare che :
(Conservazione della potenza complessa)
Ak 0
Vk I k 0 cioè
k
k
cioè Pk jQk 0 da cui discende che :
k
Pk 0
k
Conservazione della potenza
Attiva
Qk 0 (Teorema di Boucherot)
k
Conservazione della potenza
Reattiva
26
Questi teoremi trovano utilissima applicazione per la determinazione di grandezze di
rete, prescindendo da esplicite considerazioni di fase.
Si noti inoltre che in generale
A0
cioè la potenza apparente in genere non si
k
conserva.
27
Caratterizzazione di un bipolo (una porta) in termini di potenze, in regime
sinusoidale
Sono dati:
A
P Q
V
P
I
V cos
arccoscos
Allora
P cos
B
Fig. 7
Di conseguenza il bipolo suddetto si può schematizzare in termini di impedenza:
A
X
V
R
V
Z I
Q
tan
P
R Z cos
X Zsen
B
Fig. 8
28
Oppure in termini di Y :
A
G
V
B
I
Y V
Q
tan
P
G Y cos
B Ysen
B
Fig. 9
Esempi di applicazione della conservazione delle potenze in regime sinusoidale
1. Calcolo delle potenze per elementi in serie:
Z 2
Z 1
A
B
Fig. 10
Z 1 R1 jX 1
Z 2 R 2 jX 2
PAB P1 P2
PAB
R
1
Q AB Q1 Q2
R1 R2
R2 X 1 X 2
2
2
V2
QAB
X1 X 2
R1 R2 X 1 X 2
2
2
V2
29
2. Dato il circuito in cui sono noti V , P1 , cos 1 , P2 , cos 2 ricavare I
Ptot
1
Qtot
P2
cos 2
P1
cos 1
2
Fig. 11
Si applica Boucherot:
Ptot P1 P2
Q
Qtot Q1 Q2
Q
A tot Ptot2 Qtot2 V I
1
2
P1 tan 1
P2 tan 2
Atot
I V
Q
tan tot tot
Ptot
30
3. Calcolo di V1 noti R, X , P2 , Q2 , V2 ,
1
V1
R
X
I
P1
P2
Q1
Q2
1’
2
V2
2’
Fig. 12
Si segue un procedimento analogo applicando Boucherot:
P22 Q22
A2
I si ricava dalla porta 2 I
V2
V2
P1 P2 RI 2
2
Q1 Q 2 XI
in definitiva:
V1
P12 Q12
I
e
tan
Q1
P1
31
Teorema sul massimo trasferimento di potenza “Adattatori energetici”
Consideriamo il circuito:
Z g
Z L
+
-
Vg
I
PL ReZ L I 2
I
Fig. 13
Vg
Zg ZL
rappresenta una data impedenza passiva, e Vg è il fasore
In questo circuito Z g
rappresentante il generatore di tensione sinusoidale fissato alla frequenza angolare .
Perciò V g t Re V g e jt .
L’impedenza Z L rappresenta un’impedenza di carico passivo il cui valore deve essere
scelto in modo che la potenza attiva entrante in Z L ( in regime sinusoidale ) sia
massima.
Per esempio potremmo voler progettare il primo stadio di un radio telescopio.
Il generatore Vg t rappresenta un’onda elettromagnetica sopravveniente e
l’impedenza Z g è l’impedenza dello spazio libero, dei cavi, delle guide d’onda ecc.
…, che portano al primo stadio. Il problema è quello di scegliere la migliore
impedenza d’ingresso Z L per il primo stadio così da pilotare il primo stadio con la
maggior potenza possibile.
PL R L
R
Vg
R g X L X g
2
L
2
2
in cui Vg , Rg , X g sono fissati
32
Osserviamo che R g ed RL sono entrambi >0 e occorre minimizzare il denominatore
che è una somma di quadrati.
Siccome X L può essere maggiore o minore di zero allora possiamo scegliere
X L X g affinché il termine X L X g nel denominatore diventi zero.
2
Con questa scelta PL diventa:
PL R L
R
Vg
2
Rg
2
L
Dobbiamo a questo punto determinare RL ottimo ( PL è funzione di una sola variabile)
ponendo
dPL
0 si ha
dRL
max PL
Vg
Vg
2
R
R g 2R L R g R L
2
L
R
Rg
4
L
0
RL Rg
2
( PL in condizioni di adattamento)
4RL
in definitiva :
Z L che rende max PL è l’impedenza coniugata di Z g (cioè Z g ). L’adattamento pertanto
si dice su base coniugata.
E’ interessante confrontare la massima potenza attiva formata al carico, con la
massima potenza attiva fornita dalla sorgente, quest’ultima data da:
Pg ReZ g Z L I
I
Vg
2Rg
2
nelle condizioni di adattamento coniugato
perciò Pg
V
2
2Rg
pertanto in condizioni di adattamento il rendimento energetico (definito come
PL
) vale adatt. 0,5
Pg
0 1
33
Per i radar ed i radio telescopi questo fatto non ha alcuna importanza, perché
l’energia dell’onda elettromagnetica andrebbe perduta se non fosse assorbita dal
primo stadio.
Per gli ingegneri elettrici la situazione è capovolta, l’energia fornita infatti è costosa e
le compagnie elettriche sono oltremodo interessate al rendimento; esse vogliono
fornire quanta più potenza attiva producono al carico (cioè al cliente). Di
conseguenza i grossi alternatori non sono mai adattati su base coniugata.
Progetto di reti di adattamento
Generalmente l’impedenza Z L è fissata. L’adattamento, come abbiamo avuto modo di
vedere, consiste nello scegliere un carico opportuno Z L Z g
in modo che le
condizioni di massimo trasferimento di potenza siano realizzate.
Se Z L Z g l’adattamento consiste allora nel modificare l’impedenza di carico,
utilizzando opportuni circuiti (di solito reti reattive). La modifica suddetta prende il
nome di trasferimento di impedenza.
A
C
Z g
Vg
+
-
Rete di
adattamento
Z AB Z g
B
Z L Z g
D
Fig. 14
34
Per la realizzazione di reti di adattamento si utilizzano capacitori, induttori e
trasformatori ideali opportunamente connessi in modo da soddisfare la condizione
richiesta (reti ad L, T , )
Rifasamento
A
P
Q
Linea
E
+
-
Z
di
Trasmissione
B
assorbite
V
questi parametri
caratterizzano il
comportamento
del sistema.
Fig. 15
Le linee di trasmissione vengono impiegate per trasferire energia da un generatore ad
un carico. Alle basse frequenze, ad esempio alla frequenza di rete, si usano normali
conduttori, (lo studio può essere fatto con la teoria dei circuiti) alle alte frequenze si
impiegano cavi coassiali o linee bipolari del tipo a piattina ed il comportamento
dipende dalle costanti distribuite dei dispositivi, a frequenze ancora più alte si usano
guide d’onda.
Nelle linee di trasmissione, quindi, resistenza, induttanza, capacità e conduttanza
sono distribuite uniformemente lungo le linee stesse e sono dette costanti distribuite.
35
Per caratterizzare il comportamento della linea usiamo un:
Modello a parametri concentrati
R
L
Fig. 16
Realtà fisica:
l
d
Fig. 17
36
Abbiamo
R
I
L
A
V
P
PL
Z
V
+
Q
V
V
Z
I
B
Fig. 18
Ci sono effetti parassiti:
1. Potenza attiva dissipata nella resistenza ( potenza perduta)
2. Il generatore non è ideale (impedenza interna) problema di seconda
approssimazione
3. La tensione ai morsetti A e B noi vorremmo rimanesse costante.
4. Abbiamo una caduta di tensione V .
Il sistema non funziona, quindi, in modo ottimale.
E R jX L I V
V Ve j 0 (prendiamo V come riferimento)
I Ie j
Q VIsen
P VI cos
I I cos jIsen
Q
P
j
V
V
Q P
Q
P
R X j X R V
V V
V
V
pertanto
E V R
Q
P
E R jX j V
V
V
Q
P
X
V
V
dipende dalla potenza reattiva
caduta di tensione
37
Per quanto riguarda la corrente di linea la situazione in un diagramma vettoriale è:
V
I L I cos jI sen
I
( I cos componente attiva)
Fig. 19
P VI cos
il rapporto
P
I cos lo manteniamo fisso
V
Pperduta RI L2
sullalinea
Fissata la potenza attiva da fornire al carico:
se Q 0 (carico ohmico- induttivo) possiamo inserire elementi reattivi la cui azione
sia opposta a quella dei carichi, quindi condensatori, diminuendo così fino a quasi
annullare, se è conveniente, la componente reattiva della corrente richiesta al
generatore da un carico.
Il ragionamento sulla corrente può essere ripetuto a proposito delle potenze, infatti,
per il teorema di Boucherot, diminuisce la potenza reattiva ai morsetti del generatore.
A questa operazione si da il nome di Rifasamento.
38
Rifasamento di un carico induttivo
Iu
IL
P
IC
Z
V
Q
Fig. 18
I L Iu IC
I u I cos jIsen
IC
V
jCV
1
j C
Supponiamo di conoscere P cos
V (carico).
P e V restano costanti, vogliamo
modificare cos da cos 0 a cos1
I L 0 I L 0 cos 0 jI L 0 sen 0
I L1 I L1 cos1 jI L1 sen1
P è costante, quindi, essendo V costante le componenti del coseno nelle due
equazioni devono restare costanti (coincidono).
I L1 I L 0
cos 0 0
se
cos 1 0,90 0,95
cos1 1 si ha il rifasamento totale.
Prima del rifasamento:
1.
P VI cos 0
Q VIsen 0
dopo il rifasamento:
39
Ptot P
2.
Qtot Q QC
dividendo membro a membro si ha:
Qtot Q QC Q QC
;
Ptot
P
P
P
Qtot
tan 1
Ptot
Q
tan 0
P
pertanto
tan 1 tan 0
QC
P
QC Ptan 1 tan 0
Occorrerà aggiungere al carico un condensatore avente potenza reattiva QC
Q
C
QC X C I 2 -
Ptan 1 tan 0
V2
XC
XC
1
C
per cui
QC CV 2
C
QC
V 2
40