PERCORSI AZZERAMENTO 2009-2010
Prof. Giacomo Messina
Introduzione alla FISICA
Facoltà di Ingegneria
Università di Reggio Calabria
1
1. Introduzione
La Fisica è una scienza sperimentale che studia i fenomeni che avvengono nel mondo
esterno per giungere ad una accurata descrizione e interpretazione di essi e dei loro legami.
L’obiettivo principale è quello di sviluppare delle teorie o dei modelli (basati su leggi
fondamentali) che siano in grado di predire i risultati degli esperimenti. E’ sufficiente un
numero limitato di leggi fondamentali per spiegare un grandissimo numero di fenomeni fisici
anche apparentemente scorrelati. Ad esempio le quattro equazioni di Maxwell descrivono tutti
i fenomeni elettromagnetici, dall’elettrostatica alla magnetostatica alla propagazione di onde
elettromagnetiche. Esse racchiudono in sostanza tutto l’elettromagnetismo.
Le leggi della fisica nascono come generalizzazioni tratte da osservazioni e risultati
sperimentali. Basti pensare alla legge di Newton della gravitazione universale, che è stata
sviluppata mettendo insieme, grazie alla intuizione e alla genialità di Newton, una serie di
osservazioni quali la forma delle traiettorie dei pianeti nel loro moto intorno al sole,
l’accelerazione dei corpi in prossimità della superficie terrestre, l’accelerazione della luna
nella sua orbita. Newton comprese che si trattava di aspetti differenti dello stesso problema.
Le leggi fisiche sono espresse di solito sotto forma di equazioni matematiche. Alcune leggi
sono invece espresse sotto forma di disuguaglianza, come il secondo principio della
Termodinamica.1
Ogni volta che sorgono discrepanze fra teoria ed esperimento occorre formulare nuove teorie
o introdurre nuovi concetti. Un esempio classico di questo modo di procedere in fisica è
quello della Meccanica Relativistica. La teoria di Newton, basata sulle trasformazioni di
Galileo, predice che se un corpo ha velocità v’ rispetto ad un sistema di riferimento O’x’y’z’ e
u è la velocità di questo sistema rispetto ad un altro Oxyz allora la velocità del corpo misurata
da un osservatore posto nel sistema Oxyz è semplicemente v= v’+u (legge di addizione delle
velocità di Galileo).Tuttavia, se si tratta di luce, l’osservatore in Oxyz misura lo stesso valore
c che misurerebbe un osservatore in O’x’y’z’. Questo risultato sperimentale venne preso da
Einstein come postulato della teoria della relatività ristretta: “La velocità della luce è la stessa
per tutti gli osservatori inerziali, qualunque sia il moto della sorgente”. Questo postulato,
insieme al principio di omogeneità e di isotropia dello spazio (tutti i punti e tutte le direzioni
dello spazio sono equivalenti) permise di trovare le corrette relazioni di trasformazione tra due
sistemi inerziali in moto relativo con velocità costante, le cosiddette “trasformazioni di
Lorentz”. Tali relazioni si riducono a quelle di Galileo per velocità “piccole” rispetto a quella
della luce.
2. Grandezze fisiche
Gli elementi fondamentali della fisica sono le “grandezze fisiche” in termini delle quali
vengono espresse le sue leggi. Tra le grandezze fisiche annoveriamo lunghezza, intervalli di
tempo, forza, velocità, temperatura, intensità di campo magnetico, intensità luminosa ecc..
Molti di questi termini, come lunghezza e forza, fanno parte del linguaggio quotidiano. In
fisica però i termini associati alle grandezze fisiche vanno definiti in modo chiaro e preciso,
evitando di confonderli con il loro significato nel linguaggio quotidiano. Per esempio in
meccanica si parla di lavoro fatto da una forza che non ha nulla a che fare con il concetto
quotidiano di lavoro, sinonimo di sforzo. Per il fisico, se un uomo tiene sulle spalle un grosso
peso restando fermo non compie alcun lavoro, però sicuramente farà uno sforzo notevole.
Pertanto, prima di ricavare le relazioni esistenti tra grandezze fisiche, occorre definire tali
grandezze in maniera univoca. Per questo motivo in fisica occorre dare una “definizione
operativa” di una grandezza, una definizione che indichi l’insieme delle operazioni o dei
1
Tale principio può essere così enunciato: “L’Entropia di un sistema isolato non può mai diminuire; essa
aumenta se la trasformazione è irreversibile, rimane costante se la trasformazione è reversibile”. La sua
formulazione matematica è: ΔS≥0 in un sistema isolato.
.
2
procedimenti necessari alla sua misura. Una definizione non può essere considerata operativa
se non indica un procedimento sperimentale tale da poter essere effettivamente eseguito. La
“lunghezza” potrebbe essere definita in termini teorici come “estensione spaziale”. Ma questa
non sarebbe certo una definizione operativa. Viceversa la definizione operativa deve
specificare un procedimento di conteggio. In termini operativi, per lunghezza di una
determinata distanza lineare l, si intende il numero di volte, comprese le frazioni, che una
determinata unità di lunghezza u è compresa nella distanza l che si vuole misurare.
Una definizione operativa può includere concetti fisici o matematici, purchè accuratamente
specificati. Oltre al procedimento operativo del contare, la definizione di lunghezza implica,
ad esempio, il concetto di corpo rigido, con il quale si intende un oggetto nel quale le
reciproche distanze tra i suoi punti rimangono invariate in qualsiasi condizione. Chiaramente
un corpo perfettamente rigido non esiste, è solo un’astrazione teorica, ma a tutti gli effetti
pratici i solidi possono essere pensati come corpi rigidi.
3. Grandezze fondamentali e grandezze derivate
Molte grandezze fisiche non sono indipendenti tra loro, ma sono legate da relazioni che
sono caratteristiche dei processi fisici nei quali sono coinvolte. Per esempio la velocità è il
rapporto fra lo spazio percorso e l’intervallo di tempo impiegato a percorrerlo; la pressione è
il rapporto fra la forza applicata perpendicolarmente a una superficie S e l’area della
superficie stessa.
Tra tutte le grandezze fisiche ne viene scelto un piccolo numero che costituisce l’insieme
delle “grandezze fondamentali”. Per tali grandezze si fissa un’unità di misura, mediante un
campione opportunamente definito. Le corrispondenti unità si chiamano “unità fondamentali”.
Le altre grandezze, le cui unità sono dedotte per mezzo delle relazioni che intercorrono con le
grandezze fondamentali, si chiamano “grandezze derivate” e così le corrispondenti unità
saranno chiamate “unità derivate”. Tali unità possono restare così come sono, oppure si può
dare loro un nome particolare. Per esempio la velocità e l’accelerazione sono grandezze
derivate e le loro unità (nel Sistema Internazionale, definito più avanti) sono m/s e m/s2. La
forza è anch’essa una grandezza derivata e la sua unità è il Newton (N) dove 1 N = 1 kg*m/s2.
L’insieme delle grandezze fondamentali e delle corrispondenti unità di misura costituisce un
Sistema di Unità di Misura.
E’ importante sfruttare le relazioni che intercorrono fra le grandezze fisiche in modo tale
da ridurre al massimo il numero di unità da definire mediante un campione e in modo tale da
semplificare certi fattori di proporzionalità che altrimenti rendono più complesse le formule
che descrivono i processi fisici. 2
2
L’esempio più semplice è quello della forza di interazione fra cariche elettriche. Sperimentalmente si trova che
la forza di interazione fra due cariche elettriche è proporzionale al prodotto delle cariche e inversamente
proporzionale al quadrato della distanza fra le cariche: F ∝ q1q2/r2 (legge di Coulomb). La grandezza fisica
“carica elettrica” è legata alle grandezze fisiche “forza” e “lunghezza” dalla relazione di Coulomb. La cosa più
semplice sarebbe quella di definire l’unità di carica come quella carica che posta a distanza unitaria da un’altra
uguale dà luogo a una forza unitaria. Questo è proprio quello che si fa nel sistema C.G.S. (Centimetro, Grammo,
Secondo o di Gauss). Si definisce la cosiddetta unità elettrostatica (detta u.e.s.) dalla relazione
1 dine= (u.e.s.)2/cm2 ⇒ u.e.s.= (1 dina*cm2)1/2.
In questo sistema l’unità di intensità di corrente elettrica si misura in u.e.s./secondo. Nel Sistema Internazionale (S.I.)
invece si fissa come grandezza fondamentale l’intensità di corrente, la cui unità è l’Ampere. L’unità di carica è invece il
Coulomb (1C= 1A*1sec). La forza, come già detto, si misura in Newton e quindi nella relazione di Coulomb F= K
q1q2/r2 è tutto fissato; si deduce pertanto che la costante di proporzionalità K non può essere adimensionata, ma deve
avere le dimensioni di N*m2/C2 e il suo valore numerico, misurato sperimentalmente, è K= 8.9875*109.
3
4. Il Sistema Internazionale (S.I.)
Per mettere ordine sulle delicate questioni riguardanti le grandezze fondamentali e la scelta
dei campioni, nel 1875 diciassette paesi firmarono un trattato internazionale che istituiva
l’Ufficio Internazionale dei Pesi e delle Misure con sede a Sèvres, vicino Parigi. In questo
ufficio, finanziato da più di 40 governi, sono depositati diversi campioni (il chilogrammo
campione, il metro campione) e i prototipi internazionali dei diversi standard di misura
(primari e secondari). Esso ha il compito di coordinare a livello internazionale la definizione
delle tecniche di misura ed è in contatto con i laboratori di campionatura di tutto il mondo. Un
ente internazionale, la Conferenza Generale di Pesi e Misure (CGPM) si riunisce
periodicamente per proporre aggiornamenti e raccomandazioni. Il suo primo congresso si è
tenuto nel 1889 mentre il 17mo si è tenuto a Parigi nel 1983, in occasione del quale è stata data
una nuova definizione del “metro”, l’unità di misura della grandezza fondamentale
“lunghezza” (nel S.I.).
Come già detto, ad ogni grandezza fondamentale viene assegnato un campione che, per essere
accettato, deve essere:
1) “accessibile” e facilmente “riproducibile” in modo che per confronto possano essere
costruiti altri;
2) “invariabile” cioè le sue caratteristiche non devono variare nel tempo. E’necessario
quindi proteggerlo, a scapito però dell’accessibilità, che viene compromessa.
Tali requisiti (accessibilità e invariabilità) sono in contrasto fra loro ed è quindi necessario
trovare un compromesso tra le varie esigenze.
Esistono numerosi sistemi di unità di misura. Oggi il più diffuso è il Sistema Internazionale
(S.I.) fissato nella XI CGPM, tenutasi a Parigi nel 1960. Negli anni sono tuttavia state
apportate alcune modifiche nelle definizioni delle unità (nel 1971, 1975, nel 1976 e nel 1983).
IL S.I. è stato adottato ufficialmente dall’Italia con decreto legge del 14/4/1978 n.122, con
entrata in vigore in tutti i campi entro il 31/12/1978.
Il S.I. è raccomandato per ogni uso scientifico e tecnologico. Questo sistema comprende (vedi
tabella 1) 7 unità fondamentali e 2 supplementari (che sono in realtà grandezze derivate dalla
lunghezza).
4
Tabella 1
Grandezze
Fondamentali
Lunghezza
Unità
Simbolo
Metro
m
Massa
Chilogrammo
kg
Tempo
Secondo
s
Temperatura
Grado
Kelvin
°K
Ampere
A
Candela
cd
Mole
mol
Intensità di Corrente
Intensità
Luminosa
Quantità di Materia
Grandezze
Supplementari
Angolo Piano
Unità
adimensionali
Radiante
Simbolo
Angolo Solido
Steradiante
sr
rad
5
Definizione
Spazio percorso nel
vuoto dalla luce in un
tempo 1/c (c velocità
della luce nel vuoto)
Massa del prototipo di
Platino-Iridio conservato a
Sèvres
Tempo pari a 9.192.631.770
periodi di una particolare
transizione dell’atomo di
Cesio
1 °K= 1/273.16 della
temperatura termodinamica
del punto triplo dell’acqua
Corrente elettrica costante
che percorrendo due fili
conduttori
paralleli
indefiniti distanti 1 metro
fra loro e posti nel vuoto
causa tra essi una forza di
2*10-7 N*m
Intensità luminosa emessa
da un corpo nero, a 2045 °K
e sotto una pressione di
101325Pascal, in direzione
perpendicolare al foro di
uscita di sezione 1/6*10-5m2
Quantità di materia che
contiene
tante
unità
elementari quanti sono gli
atomi in 12 grammi di 12C
(numero di Avogadro pari a
6.02213674*1023 )
Definizione
Data una circonferenza, il
radiante è la misura
dell’angolo al centro che
sottende
un
arco
di
lunghezza pari al raggio
Data una superficie sferica,
lo steradiante è la misura
dell’angolo
solido,
con
vertice nel centro della
superficie
sferica,
che
sottende una calotta sferica
di raggio R2
La conferenza del 1971 ha definito anche un particolare sistema di prefissi ( vedi tabella 2)
per i multipli e i sottomultipli delle unità delle grandezze fondamentali secondo potenze di 10.
I prefissi che si riferiscono a potenze positive sono presi dal greco, quelli che si riferiscono a
potenze negative dal latino, tranne “femto-“ e “atto-“ che derivano invece dal danese.
Tabella 2
Prefisso
DecaEttoKiloMegaGiga
Tera
Peta
Exa
Abbr.
da
h
k
M
G
T
P
E
Fattore
101
102
103
106
109
1012
1015
1018
Prefisso
DeciCentiMilliMicroNano
PicoFemtoAtto-
Abbr.
d
c
m
μ
n
p
f
a
Fattore
10-1
10-2
10-3
10-6
10-9
10-12
10-15
10-18
Altri due importanti sistemi di misura sono in competizione con il S.I.; il sistema C.G.S. o
di Gauss, in termini del quale è espressa la maggior parte della letteratura in fisica e il sistema
britannico, tuttora in uso negli Stati Uniti e in Inghilterra, le cui grandezze fondamentali sono:
la lunghezza (il piede), la forza (libbra) e il tempo (secondo).
Le grandezze fondamentali della Meccanica sono lunghezza, massa, tempo.
1) Lunghezza.
L’unità di misura della lunghezza è il metro. Originariamente il metro fu definito
dall’Accademia delle Scienze francese come la 40.000.000ma parte della lunghezza del
meridiano terrestre passante per Parigi. Venne realizzato, ai tempi della rivoluzione
francese, un campione di platino-iridio, lega particolarmente stabile, con sezione ad x
(inflessione trascurabile). Tuttavia ci si accorse più tardi che la relazione fra il
meridiano terrestre e il metro campione differiva leggermente da quella assunta come
vera (oggi si sa che la lunghezza del meridiano è 40.007.476 metri). Si poteva pertanto
cambiare il campione oppure la definizione. Si scelse di cambiare la definizione di
metro-campione, che non era più la 40.000.000ma parte della lunghezza del meridiano
terrestre, ma semplicemente la lunghezza di quella sbarra di platino-iridio.
Successivamente alla XI CGPM fu adottato un nuovo campione di lunghezza
prendendo come riferimento la lunghezza d’onda, nel vuoto, della radiazione rossaarancione, corrispondente alla transizione tra i livelli 2p10 e 5d5 dell’atomo Kripton 86
(Kr86).Gli atomi di Kr86 sono universalmente disponibili, sono identici ed emettono
luce della stessa lunghezza d’onda. Questo isotopo può essere ottenuto con grande
purezza in modo relativamente facile nei laboratori di campionatura di tutto il mondo.
Un metro fu esattamente definito come 1.650.763,73 volte la lunghezza d’onda di tale
radiazione rosso-arancione. Infine nel 1983 è stata data una nuova definizione di
metro, basata sul principio di relatività ristretta secondo il quale la velocità della luce
nel vuoto è una costante universale immutabile. Secondo questa nuova definizione
(tabella 1) il metro è lo spazio percorso nel vuoto dalla luce in un tempo 1/c
(c=velocità della luce nel vuoto=299.792.458 m/s).
2) Massa.
L’unità di misura della massa è il chilogrammo. E’ ancora valida la definizione data
nel 1901: vale un chilogrammo la massa del prototipo di platino-iridio conservato a
Sevres (cilindretto di diametro3.9 cm e altezza 3.9 cm, conservato sottovuoto). Le
6
masse di altri corpi si possono determinare per confronto con il chilogrammo
campione, per esempio con la bilancia a bracci uguali.
3) Tempo.
L’unità di misura degli intervalli di tempo è il “secondo” Prima del 1960, il secondo
era definito in termini del “giorno solare medio”. Un secondo solare medio era alla
86400ma parte del giorno solare medio (1s= giorno solare medio/ (60*60*24)).3 A
causa di una lieve variazione della durata dell’anno tropico, questa definizione non è
adatta agli usi scientifici, perché si avrebbe un campione di tempo non invariabile. Una
definizione molto più precisa si può dare facendo riferimento alle transizioni atomiche,
utilizzando il fatto che il passaggio di un elettrone atomico da un livello energetico ad
un altro di energia inferiore (transizione atomica) è accompagnato dall’emissione di
radiazione elettromagnetica di frequenza proporzionale alla differenza di energia fra i
livelli interessati. Lo stato fondamentale (di energia minima) degli atomi dell’isotopo
133 del Cesio (Cs 133) è, in realtà, diviso in due livelli molto vicini fra loro a causa
della interazione magnetica fra gli elettroni e il nucleo (struttura iperfine). La
radiazione emessa durante la transizione fra questi due livelli ha una frequenza che
cade nella regione delle microonde (circa 9.193 GHz). Il secondo campione è stato
allora opportunamente ridefinito. Un secondo è l’intervallo di tempo pari a
9.192.631.770 periodi della radiazione elettromagnetica emessa dagli atomi di Cs 133
quando transitano fra i livelli iperfini dello stato fondamentale (uguale al secondo
solare medio quale era nel 1900).
La tendenza è di riferirsi a fenomeni atomici per la costruzione di campioni migliori in
quanto, oltre ad essere molto precisi, permettono di conciliare i requisiti di riproducibilità e
invariabilità.
3
Il giorno solare medio si ottiene, come è noto dalla geografia astronomica, dividendo l’intervallo di tempo compreso
fra due equinozi di primavera (chiamato “anno tropico”), in 365,242201 intervalli di tempo uguali.
7
Analisi Dimensionale
Per la meccanica le grandezze fisiche fondamentali nel S.I. sono, come già detto, la
lunghezza, la massa e l’intervallo di tempo, indicate rispettivamente con L, M, T. Si è visto
prima che le unità di misura delle grandezze derivate sono ricavate attraverso quelle delle
grandezze fondamentali sulla base della relazione fisica che intercorre fra la grandezza
derivata e le grandezze fondamentali. Per esempio, la velocità media in un intervallo di tempo
Δt in un moto unidimensionale è il rapporto fra lo spazio Δx percorso e l’intervallo di tempo
impiegato a percorrerlo, cioè
Δx
v=
Δt
Cosa bisogna fare per determinare “le dimensioni” di questa grandezza derivata? Bisogna
guardare alla relazione fisica che lega la grandezza derivata alle grandezze fondamentali, in
questo caso lunghezza e tempo. La velocità è il rapporto fra una lunghezza e un intervallo di
tempo, quindi le sue dimensioni saranno quelle di una lunghezza diviso per un tempo, cioè
[v ] = ⎡⎢ Δx ⎤⎥ = L = L * T −1
⎣ Δt ⎦ T
La parentesi quadra indica che si stanno calcolando le dimensioni di quella grandezza.
Si badi che questo risultato è indipendente dalle unità di misura scelte per le grandezze
fondamentali (m/s nel S.I., cm/s nel sistema di Gauss o piedi/s in quello britannico).
ESEMPI
1) Accelerazione.
[a ] = ⎡⎢ Δv ⎤⎥ = L * T
⎣ Δt ⎦
T
−1
= L * T −2
2) Forza.
[F ] = [m * a ] = M * L * T −2
3) Energia Cinetica.
[Ec ] = ⎡⎢ 1 mv 2 ⎤⎥ = M (L * T −1 )2 = M * L2 * T −2
⎣2
⎦
4) Lavoro
[W ] = [F .Δx ] = MLT −2 * L = M * L2 * T −2
Il lavoro ha le stesse dimensioni dell’energia cinetica.
Queste relazioni prendono il nome di “Equazioni Dimensionali”.
8
Ad ogni grandezza fisica è possibile pertanto associare le “dimensioni” che esprimono il
legame fra questa grandezza e quelle fondamentali. L’utilità delle equazioni dimensionali
risiede nel fatto che esse consentono di fare un’analisi dimensionale delle relazioni fisiche.
Data una relazione fisica, se si sostituisce ad ogni grandezza fisica che compare nella
relazione le sue dimensioni e si trattano i simboli delle grandezze fondamentali come quantità
algebriche, ciascun membro della relazione deve avere le medesime dimensioni affinchè la
relazione sia corretta. Per esempio, nello studio del moto rettilineo uniformemente accelerato
ricaveremo che lo spazio percorso è legato all’accelerazione e al tempo dalla relazione
x=½at2.
Da un punto di vista dimensionale:
[x ] = ⎡⎢ 1 at 2 ⎤⎥ =
L
*T 2 = L
2
⎣2
⎦ T
Questa è un’equazione dimensionalmente corretta, dato che le dimensioni del primo membro
sono uguali a quelle del secondo. Naturalmente il fatto che i due membri siano
dimensionalmente omogenei è condizione necessaria ma non sufficiente per la correttezza
dell’equazione. Per esempio se avessimo ricavato che il legame fra spazio percorso,
accelerazione e tempo in un moto uniformemente accelerato è dato dalla relazione x=3at2, per
l’analisi dimensionale il risultato sarebbe “dimensionalmente consistente”, mentre esso è
sbagliato per un fattore moltiplicativo (3 invece di ½).
Se le dimensioni del 1° membro di un’equazione che abbiamo ricavato non sono le stesse di
quelle del secondo membro, allora l’equazione è sicuramente sbagliata. Un esempio di
equazione non corretta può essere il seguente:
a=h/mt
⎡ h ⎤
−1
−1
⎢⎣ m * t ⎥⎦ = L * M * T
Tali dimensioni risultano diverse da quelle di a (L*T-2), quindi l’equazione è sicuramente non
corretta. Si commetterebbe un grave errore se non ci si accorgesse di un’inconsistenza di
questo tipo.
L’analisi dimensionale ha un’altra utile applicazione che consiste nel ricavare le
dimensioni, e quindi le unità di misura, di certe costanti che compaiono nelle leggi fisiche. Per
esempio:
1) F= -γ v (forza di attrito viscoso);
M * L * T −2 = [γ ]* L * T −1
da cui si ricava che le dimensioni di γ sono M T-1 e la corrispondente unità è kg s-1.
2) F= -k*x (forza di richiamo di una molla (legge di Hooke))
M * L * T −2 = [k ]* L
da cui si ricava che le dimensioni di k sono M* T-2 e la sua unità è kg* s-2.
9
3) F=G*m1*m2/r2 (legge di gravitazione universale di Newton)
M * L * T −2 = [G ]* M 2 * L−2
da cui si ricava che le dimensioni di G sono L3*M-1*T-2 e la sua unità è m3*kg-1*s-2.
Infine mediante considerazioni dimensionali è possibile dedurre informazioni sulla forma
algebrica di alcune leggi fisiche:
1) Periodo pendolo.
Un pendolo semplice può essere considerato come un filo di lunghezza l, fissato ad un
estremo,e che porta all’altro estremo una massa m, soggetta alla forza di gravità. Il suo
periodo τ di oscillazione deve dipendere necessariamente dalle grandezze in gioco e
cioè dalla lunghezza l del filo, dal valore della massa m attaccata e dall’accelerazione di
gravità g.
l
m
g
Si ipotizza pertanto una legge del tipo: τ= K*lx*my*gz dove K è una costante
adimensionale e gli esponenti x, y e z, incogniti, sono da determinare con l’ausilio
dell’analisi dimensionale. Confrontando le dimensioni dei due membri della precedente
relazione si ha (τ è un tempo e g una accelerazione):
[τ]= Lx My (LT-2)z
da cui
T= Lx My LzT-2z
e
L0 M0 T1 = Lx+z My T-2z
e, infine, uguagliando gli esponenti (a primo membro L e M hanno esponente 0) si ha il
sistema:
x+z=0
y=0
-2z=1
x=1/2
y=0
z=-1/2
da cui
sostituendo tali valori nell’espressione di τ si ha:
1
2
−
1
2
τ = K *l * g = K
l
g
che è l’espressione effettiva di τ, ricavabile per altra via dalla teoria del pendolo
semplice.
10
Si noti che K non può essere ricavata con l’analisi dimensionale, ma solo per via teorica
(K=2π) e questo vale per tutte le costanti.
2) Velocità di propagazione di un’onda trasversale su una corda.
Si consideri una corda di lunghezza l e massa m, a cui è applicata una forza F (tensione
della fune), su cui si propaga un’onda con velocità v. In maniera analoga al caso
precedente possiamo ipotizzare che v dipenda dalla tensione della corda, dalla sua
lunghezza l e dalla sua massa m secondo una legge del tipo
v= K Fx ly mz
Utilizzando sempre l’analisi dimensionale, possiamo scrivere:
da cui si ha
L T-1 = (M L T-2)x Ly Mz
L T-1= T-2x Lx+y Mx+z
e quindi il sistema:
x+z=0
x+y=1
-2x=-1
cioè x= ½; y= ½; z= -1/2
questi coefficienti sostituiti nella relazione iniziale, permettono di ritrovare l’effettiva
legge con cui varia v, cioè
v=k
Fl
=
m
F
F
=
m
μ
l
essendo μ= m/l la densità lineare. La teoria mostra infine che K=1.
3) Legge di Stokes..
Un corpo sferico di massa m e raggio R che cade con velocità v in un fluido avente
coefficiente di viscosità η è sottoposto ad una forza di attrito viscoso (forza di Stokes).
Tale forza deve dipendere dalla viscosità del mezzo, dalle dimensioni geometriche del
corpo, e dalla sua velocità. Ipotizziamo pertanto una legge del tipo: F= -K ηx Ry vz.
Dalla teoria dei fluidi reali, si può ricavare che le dimensioni del coefficiente di
viscosità η sono M L-1 T-1. Pertanto, procedendo come descritto nei due esempi
precedenti, si trova che:
M L T-2= (M L-1 T-1)x Ly (LT-1)z
da cui si ha
M L T-2= Mx L-x+y+z T-x-z
Uguagliando gli esponenti del primo e del secondo membro si ha:
x=1
-x+y+z = 1
-x-z = -2
x=1
y=1
z=1
Da cui segue la legge:
F= k ηRv
La teoria mostra che K=6π. Pertanto la legge di Stokes, molto utilizzata nella meccanica
dei fluidi, si può esprimere come:
F=-6π ηRv
Il segno negativo esprime il fatto che tale forza di attrito è diretta in verso opposto al
moto del corpo.
11
VETTORI
Introduzione
Le leggi della Fisica sono espresse da equazioni matematiche nelle quali compaiono quantità
che descrivono le grandezze fisiche considerate. Alcune di queste grandezze possono essere
rappresentante da un solo numero che dà il valore della grandezza rispetto ad una assegnata unità di
misura. Questo numero è in generale una funzione delle coordinate spaziali e del tempo. Queste
grandezze sono chiamate grandezze scalari o semplicemente scalari. Esempio: la temperatura
dell’aria in un dato luogo T=T(x,y,z,t). Altri esempi sono la massa e il volume di un corpo, gli
intervalli di tempo, la densità di un materiale, l’energia.
Ci sono però situazioni in cui un solo numero non è sufficiente a descrivere completamente una
grandezza fisica. L’esempio più semplice è quello spostamento di una particella nello spazio. Per
spostamento intendiamo il cambiamento di posizione della particella. Supponiamo che la particella
sia nella posizione A. Se diciamo di volere compiere uno spostamento rettilineo di lunghezza l,
abbiamo specificato di quanto ci siamo allontanati da A, ma non possiamo determinare dove
arriviamo: tutti i punti che stanno su una superficie sferica di centro A e raggio l sono possibili punti
di arrivo. Se precisiamo la direzione r dello spostamento possiamo ancora arrivare in due punti
diametralmente opposti sulla superficie sferica (B e B’); solo se indichiamo il verso di percorrenza
lungo r il risultato è univoco. Uno spostamento è quindi caratterizzato da un numero, il modulo, che
ne dà il valore in assoluto, da una direzione e da un verso. Graficamente possiamo rappresentare lo
spostamento da A a B con segmento che unisce A e B munito di freccia per indicare il verso di
percorrenza sulla retta che congiunge A e B.
r
B
B’
B
C
l
A
A’
A
B’
Si noti che uno spostamento della particella da A’ a B’, avente la stessa lunghezza dello
spostamento AB, la stessa direzione e lo stesso verso, rappresenta il medesimo spostamento, in
quanto rappresenta lo stesso cambiamento di posizione. (Questa constatazione porterà alla
definizione di uguaglianza di vettori).
Possiamo immaginare di fare un ulteriore spostamento da B a C. L’effetto complessivo dei due
spostamenti è equivalente allo spostamento da A a C. Diamo allora che AC è somma o risultante
degli spostamenti AB e BC. Si noti che questa non è una somma algebrica e che un numero da solo
non è sufficiente per specificarla.
Le grandezze che si comportano come gli spostamenti sono chiamate vettori. Diamo quindi la
seguente definizione:
i vettori sono grandezze caratterizzate da una direzione, da un verso e da un valore numerico
chiamato ampiezza (o modulo), e che si combinano secondo determinate regole di addizione
che specificheremo fra breve.
Le grandezze che sono completamente determinate da un numero che ne rappresenta la misura
rispetto ad una assegnata unità di misura sono invece chiamate "scalari" (grandezze scalari).
Due sono le proprietà fondamentali della notazione vettoriale:
12
1. la formulazione delle leggi fisiche in forma vettoriale è indipendente dalla scelta del sistema di
assi coordinati. La notazione vettoriale offre un linguaggio in cui le espressioni hanno un
significato fisico intrinseco, indipendente dal sistema di coordinate.
2. il simbolismo vettoriale è conciso. Molte leggi fisiche hanno un aspetto più semplice in
notazione vettoriale rispetto a quando sono espresse relativamente ad un particolare sistema di
coordinate.
Per segnalare la natura vettoriale di una grandezza viene usata una lettera stampata in neretto A
r
(grassetto) oppure una lettera con una freccetta sopra A . Il modulo del vettore viene indicato con
r
A oppure semplicemente con A. Per rappresentare un vettore su un diagramma si usa una freccia la
cui lunghezza è proporzionale all'ampiezza del vettore, la cui direzione è coincidente con quella del
vettore e la cui punta dà il verso del vettore.
Versori
r
r
Un vettore di modulo 1 con la direzione ed il verso di A viene chiamato"versore di A " ed è
indicato con  .
punta
r
A
Â
Origine o coda
I versori degli assi coordinati vengono solitamente indicati con iˆ, ˆj , kˆ oppure con xˆ , yˆ , zˆ
Z
Y
k̂
iˆ
ĵ
X
13
Opposto di un vettore
r
r
Unr vettore A' che ha lo stesso modulo e la stessa direzione di A , ma verso opposto è indicato con
− A . Il segno “-“ davanti a un vettore ne cambia semplicemente il verso.
r
A
r
−A
Uguaglianza fra due vettori
Due vettori si dicono uguali se hanno stesso modulo, stessa direzione e stesso verso.
r
A
r
B
Moltiplicazione di un vettore per uno scalare
r
Il prodotto dir uno scalare K per un vettore A è un nuovor vettore il cui modulo è |K| volte il modulo
r
del vettore A , la cui direzione coincide con quella di A , e il cui verso è uguale a quello di A se
r
K>0 oppure è opposto a quello di A se K<0.
Ovviamente dividere un vettore per uno scalare K significa moltiplicare il vettore per il reciproco
dello scalare (moltiplicare per 1/K).
r
Il vettore A può essere espresso tramite il versore  attraverso la relazione:
r
A = AAˆ
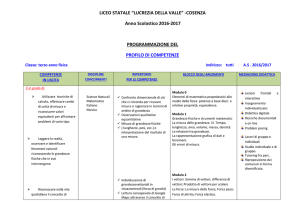
Somma e differenza di vettori
r
r
La somma di due vettori A e B si definisce tramite la costruzione geometrica in figura.
r
r
Si trasporta B parallelamente a se stesso fino a fare coincidere l'origine (la “coda”) di B con la
r
r
punta di A . Il vettore che ha per direzione quella della congiungente la coda di A con la punta di
r
B che ha per modulo la lunghezza del segmento che ha questi due punti per estremi, e verso dalla
r r
coda del primo alla punta del secondo è per definizione A + B .
14
r
B
r
A
r r
A+B
r
B
r
A
r r
A+ B
r
B
r
A
r
r
r
r
La sottrazione fra i vettori A e B è definita come la somma di A con il vettore − B .
( )
r r r
r
A− B ≡ A+ − B
r
A
r
B
r
−B
r
A
r r
A− B
r
−B
r r
r
r
r
Se i vettori A e B hanno l’origine in comune, il vettore A − B va dalla punta di B alla punta di
r
r
r
A e rappresenta una diagonale del parallelogramma formato da A e B .
r
r
Se r1 rappresenta la posizione di una particella ad un istante di tempo t1 ed r2 la sua posizione ad
r r
un istante t2, il vettore r2 - r1 rappresenta il vettore spostamento della particella e va dalla punta di
r
r
r1 alla punta di r2 .
15
r
r2 - rr1
r
r2
r
r1
r r
A− B
r
B
r
A
La somma vettoriale gode della proprietà commutativa:
r r r r
A+B ≡ B + A
r r
A+B
r
A
r
B
r
A
r r
B+A
r
B
La somma vettoriale gode della proprità associativa:
r r r
r r r
A +( B + C )=( A + B )+ C
r
C
r r r
A +( B + C )
r
C
r r r
( A + B )+ C
r
B
r
A
r
B
r
A
La somma vettoriale gode della proprietà distributiva rispetto al prodotto con uno scalare:
r
r
r r
K( A + B )=K A +K B
16
r r
A +B
r
r
K A +K B
r
B
r
A
r
KB
r
KA
r
r r
r
+K
è
K-volte
la
lunghezza
di
+ B . Quindi
I triangoli
sono
simili.
La
lunghezza
di
K
A
B
A
r
r r
r
K A +K B ha la stessa direzione e verso di A + B e modulo:
r
r r
r
KA + KB = K A + B
dimostrando così l’uguaglianza.
Vettori e grandezze fisiche
Affinché una grandezza fisica sia rappresentabile come un vettore deve:
•
•
avere modulo, direzione e verso indipendenti dalla scelta del sistema di coordinate;
soddisfare la legge della somma dei vettori (regola del parallelogramma).
Scomposizione e addizione dei vettori: metodo analitico
Il metodo geometrico per la somma di due o più vettori non è utile per vettori in 3 dimensioni. Si
usa allora il metodo analitico che conporta la scomposizione di un vettore nelle sue componenti
r
rispetto ad un particolare sistema di coordinate. Il vettore A può essere pensato come la risultante
di due vettori uno lungo x ( OX ) ed uno lungo y ( OY ) :
r
A = OX + OY
I vettori OX ed OY possono essere espressi attraverso i versori iˆ e ĵ degli assi x ed y attraverso
le relazioni:
OX =AX iˆ
OY =AY ĵ
r
I numeri Ax e Ay sono detti le componenti di A lungo x e lungo y (Ax e Ay sono numeri con segno).
Le relazioni che legano Ax ed Ay ad A e θ sono le stesse di quelle che legano le coordinate
cartesiane e le coordinate polari, cioè:
Ax=Acosθ
A=
AX2 + AY2
17
Ay=Asenθ
tgθ=Ay/Ax
y
r
A
Y
ĵ
O
iˆ
X
x
Il vettore A può quindi essere espresso come
r
A =Ax iˆ +Ay ĵ
r
r
I vettori Ax iˆ e Ay ĵ sono detti i vettori componenti di A o semplicemente i componenti di A .
Consideriamo allora due vettori
r
A =Ax iˆ +Ay ĵ
il vettore somma sarà
r
B =Bx iˆ +By ĵ
r r r
C = A + B =(Ax iˆ +Ay ĵ )+(Bx iˆ +By ĵ )=
= Ax iˆ + Bx iˆ + Ay ĵ + By ĵ =
=( Ax+ Bx) iˆ (Ay+By) ĵ =
=Cx iˆ +Cy ĵ
dove
Cx=Ax+Bx
Cy=Ay+By
In altre parole la componente del vettore somma lungo un determinato asse è data dalla somma
algebrica delle singole componenti dei vettori di partenza lungo quell'asse.
18
Y
By
r r r
C = A+B
Ay
O
X
Bx
Ax
C = C X2 + CY2 =
tgθ =
( AX
Cy
Cx
=
+ B X ) + ( AY + BY )
2
2
Ay + B y
Ax + B x
Moltiplicazione fra vettori
Risulta utile definire due diversi tipi di moltiplicazione tra vettori:
1. moltiplicazione tra vettori che dà origine a uno scalare (prodotto scalare)
2. moltiplicazione tra vettori che dà origine a un vettore (prodotto vettoriale)
Prodotto scalare
Si definisce prodotto scalare
r di
moltiplicando moduli di A e di
r
B
r
r r
r
A e B , e si indica col simbolo A • B , quel numero che si ottiene
r
B per il coseno dell’angolo fra essi compreso.
ϕ
r
A
r r
A • B =ABcosϕ=A(Bcosϕ)=(Acosϕ)B=BAcosϕ
r
Prodotto del modulo di B per la componente di
r
r
A nella direzione di B
r
Prodotto del modulo di A per la componente di
r
r
B nella direzione di A
19
Il prodotto scalare gode della proprietà commutativa:
r r r r
A
•B=B•A
r
r
r
r
dato che l’angolo formato da A e B è lo stesso di quello formato da B ed A .
Il prodotto scalare è:
- positivo se i due vettori formano un angolo acuto 0<ϕ<π/2;
- negativo se i due vettori formano un angolo ottuso;
r r
r
r
A • B =0
con A≠0 e B≠0
cosϕ=0 cioè A e B sono ortogonali (ϕ=π/2)
Se
r r
r r
Se i due vettori hanno stessa direzione e verso allora A • B = AB (in particolare A • A = A 2 )
Non esiste “l’operazione inversa” del prodotto scalare:
r r
r
X non è univocamente determinato.
se A • X =b
Chiaramente non ha senso parlare di proprietà associativa.
Vale la proprietà distributiva del prodotto scalare rispetto alla somma
r
r r r r r r
A • ( B + C )= A • B + A • C
Esempio:
r
A
r r
A-B
r
B
r r r
D= A-B
r r
r r r r r r r r r r
r r
D • D =( A - B )• ( A - B )= A • A - A • B - B • A + B • B =
D 2 = A 2 + B 2 -2ABcosϕ
Questa relazione è nota in trigonometria come “legge del coseno o di Carnot”, e si riduce al
teorema di Pitagora per φ=π/2.
Ci si potrebbe chiedere il perchè di una definizione così “strana” di prodotto. Non sarebbe stato più
semplice utilizzare il semplice prodotto dei moduli? E’ facile vedere che, se il prodotto scalare fosse
definito semplicemente come il prodotto dei moduli dei due vettori, non varrebbe la proprietà
r
r
r r r
distributiva. Indichiamo infatti con ⊗ questa operazione A ⊗ B =AB. Se D = B + C , allora
r r r
r r
r r
r r
r
r
r
A ⊗ ( B + C ) = A B + C che in generale è diverso da A B + A C . Per esempio se B e C sono
r r r
r r
r r
r r
l’uno l’opposto dell’altro allora ( B + C ) = 0 e quindi A B + C =0, mentre A B + A C è
sicuramente positivo.
20
Prodotto vettoriale
r r
r r
r
Si definisce prodotto vettoriale A × B (indicato anche comer A ∧ B ) di due vettori A e
r
r
B un vettore il cui modulo è dato dal prodotto del modulo di A per il modulo di B per il
r
r
seno dell’angolo formato da A e B , la cui direzione è quella della normale al piano
r
r
individuator da A e da B e il cui verso è quello indicato dal pollice della mano destra quando
r
il vettore A va verso B nel senso dell’angolo minore (regola della mano destra).
r
B
r r
A-B
Bsinϕ
ϕ
r
A
r r
A × B = AB sen ϕ =A(Bsenϕ)
r
r
Il modulo del prodotto vettoriale di A e B rappresenta l’area del parallelogramma i cui lati non
r
r
paralleli sono i vettori A e B .
r r
L’area del triangolo che ha per lati i due vettori ed il vettore differenza A - B sarà allora pari a
r r
½ A×B
Il prodotto vettoriale di due vettori paralleli è nullo. E’ invece massimo quando i due vettori sono
ortogonali (senϕ=1).
(
)
r r r
r r r r
A× B + C = A× B + A×C
Per il prodotto vettoriale vale la proprietà distributiva:
Valgono le seguenti relazioni fra i versori:
Z
iˆ × ĵ = k̂
ĵ × k̂ = iˆ
k̂ × iˆ = ĵ
Y
k̂
ĵ
iˆ × iˆ =0
ĵ × ĵ =0
iˆ
k̂ × k̂ =0
X
Le relazioni di sopra possono essere facilmente ricordate utilizzando il seguente “triangolo” da
percorrere in senso orario (i per j dà k, j per k dà i, k per i dà )
iˆ
ĵ
k̂
21
r r
r
r
Possiamo esprimere il prodotto vettoriale A × B attraverso le componenti di A e B :
r r
A × B =( AX iˆ + AY ĵ + AZ k̂ )×( B X iˆ + BY ĵ + BZ k̂ )=
= AX B X iˆ × iˆ + AX BY iˆ × ĵ + AX BZ iˆ × k̂ +
AY B X ĵ × iˆ + AY BY ĵ × ĵ + AY BZ ĵ × k̂ +
AZ B X k̂ × iˆ + AZ BY k̂ × ĵ + AZ BZ k̂ × k̂ =
=( AX BY - AY B X ) k̂ +
( AZ B X - AX BZ ) ĵ +
( AY BZ - AZ BY ) iˆ
I termini che moltiplicano i versori coincidono con gli sviluppi di determinanti del secondo ordine
iˆ
r r
A × B = AX
BX
ˆj
AY
BY
kˆ
A
AZ = Y
BY
BZ
AZ
A
iˆ - X
BZ
BX
AZ
A
ĵ + X
BZ
BX
AY
k̂
BY
Per il prodotto vettoriale non vale la proprietà associativa:
r r r
r r r
A ×( B × C )≠( A × B )× C
r
r
r
Per verificare ciò basta calcolare il primo e il secondo membro per A = iˆ B = ĵ C = ĵ + k̂ .
Si dimostra che per il doppio prodotto vettore valgono le relazioni:
r r r
r r r r r r
A ×( B × C )=( A • C ) B -( A • B ) C
r r r r r r r r r
( A × B )× C =( A • C ) B -( B • C ) A
22
Prodotto misto
L’espressione
r
r r
A • ( B ×C )
si indica come prodotto misto e si dimostra essere uguale al volume del parallelepipedo formato dai
tre vettori.
ϕ
r
C
r
A
r
B
Essendo il volume pari all’area della base per l’altezza,
r r
area della base = B × C
altezza = A cosϕ
r
r r
r r
volume = A B × C cosϕ = A • ( B × C )
Si dimostra che un prodotto misto non cambia permutando ciclicamente l’ordine dei vettori:
r
r r r
r r
r r r
A • ( B × C )= C • ( A × B )= B • ( C × A )
tali uguaglianze sono concettualmente banali in quanto rappresentano tutte il volume del
r r
r
parallelepipedo formato da A , B e C .
23
Esercizio N. 1
Due punti in un piano hanno coordinate polari P1=(2.50m, 30°) e P2=(3.80m, 120°). Determinare (a)
le coordinate cartesiane dei due punti e (b) la distanza fra loro.
A-B
B
A
(a)
Le coordinate cartesiane dei due punti sono:
x1 = 2.5m ⋅ cos(30°) = 2.17 m
y1 = 2.5m ⋅ sin(30°) = 1.25m
x 2 = 3.8m ⋅ cos(120°) = −1.9m
y 2 = 3.8m ⋅ sin(120°) = 3.29m
(b)
La distanza fra i due punti è data dal modulo del vettore A-B
A=2.17i +1.25j
B= -1.90i +3.29j
A – B = (2.17+1.90)i +(1.25-3.29)j = 4.07i – 2.04j
A - B = ( x1 − x 2 ) 2 + ( y1 − y 2 ) 2 = 4.55m
24
Esercizio N. 2
Una persona cammina lungo un percorso circolare di raggio 5m, per una mezza circonferenza.
Trovare (a) il modulo del vettore spostamento, (b) la effettiva distanza percorsa, (c) qual è il modulo
dello spostamento se si completa la circonferenza?
B
A
Il punto iniziale ha coordinate A=(5m,0) mentre il punto finale ha coordinate B=(-5m,0), quindi il
vettore spostamento avrà componenti:
AB = (Bx-Ax)i+(By-Ay)j = (-5m-5m)i+(0-0)j = -10mi+0j
il modulo del vettore spostamento quindi sarà:
|AB|= (−10) 2 + 0 2 = 10m
la effettiva distanza percorsa S è uguale alla metà della lunghezza della circonferenza, quindi:
S = (2πR)/2 = (2π⋅5m)/2 = 15.7m .
Se si completa la circonferenza il punto finale coincide con il punto iniziale, quindi il vettore
spostamento sarà il vettore nullo che ha modulo uguale a zero.
25
Esercizio N. 3
Due vettori sono dati da A= 3i -2j e B= -i –4j calcolare (a) A+B, (b) A-B, (c) |A+B|, (d) | A-B|,
(e) la direzione di A+B e A-B .
(a)
A+B = (3-1)i + (-2-4)j=2i - 6j
(b)
A-B = (3+1)i + (-2+4)j=4i +2j
(c)
|A+B| = [22 + (-6)2]1/2 = 6.32
(d)
|A-B| = [42 + 22]1/2 = 4.47
(e)
Per trovare la direzione occorre valutare l’angolo che un vettore forma col semiasse positivo delle
ascisse. Ricordando che
tgθ =y/x si ha:
θA+B = arctg(-6/2) = -71.6° + k 180°
dove k è un numero intero. Per determinare il valore di k basta tener conto del segno delle
componenti: dato che la componente y è negativa mentre la componente x è positiva, il vettore
giace nel IV quadrante, e quindi k =0.
θA-B = arctg(2/4) = 26.6° + k 180°
Per quanto detto sopra, il vettore, avendo entrambe le componenti positive, giace nel primo
quadrante, pertanto anche in questo caso si ha k=0.
Esercizio N. 4
Una particella è soggetta a due spostamenti, A e B. Il primo ha un modulo di 150cm e forma un angolo di 120°
con l’asse x positivo. Lo spostamento risultante R ha un modulo di 140cm ed è diretto con un angolo di 35°
rispetto all’asse x positivo. Trovare il modulo e la direzione del secondo spostamento.
Ax=150cm cos(120°)= -75cm
Ay=150cm sin(120°)= 130cm
Rx=140cm cos(35°)= 114.6cm
26
Ry=140cm sin(35°)= 80.3cm
Poiché R= A+B possiamo ottenere:
B=R-A=[(114.6+75)i+(80.3-130)j]cm = (189.6i – 49.7j)cm
|B|=[(189.6)2+(-49.7)2]1/2cm = 196 cm
θ = arctg(-49.7/189.6)= -14.7°+ k180°
dove k=0 dato che il vettore B giace nel IV quadrante.
Esercizio N. 5
Assegnato il vettore R=2i+j+3k, trovare (a) le componenti lungo gli assi x, y e z, (b) il modulo di
R, (c) gli angoli fra R e gli assi x, y e z.
(a)
Ovviamente, Rx=2, Ry=1, Rz=3
(b)
|R|=(4+1+9)1/2=(14)1/2
(c)
Gli angoli che il R forma con gli assi cartesiani si ricavano dai coseni direttori:
cosα =
Rx
2
=
=
|R|
14
2 2
cosβ =
Ry
1
14
cosγ =
|R|
=
1
14
=
2 7
=
2
7
Rz
3
9
=
=
|R|
14
14
ottenendo che:
α=arccos (2/7)1/2=57.68
β=arccos (1/14)1/2=74.49
γ=arccos (9/14)1/2=36.69
Esercizio N. 6
27
Una particella si muove da un punto nel piano xy avente le coordinate cartesiane (-3,-5)m ad un
punto di coordinate (-1,8)m. (a) Scrivere le espressioni vettoriali per i vettori posizione, nella
notazione dei vettori unitari (versori), per questi due punti. (b) Qual è il vettore spostamento?
(a)
y
b-a
b=-i+8j
x
a=-3i-5j
(b)
Rappresentando i vettori a e b nel piano cartesiano si vede immediatamente che il vettore
spostamento sarà dato da b-a:
b-a = (-1+3)i + (8+5)j = 2i + 13j
Si noti che per poter chiudere la poligonale nel disegno occorre traslare il vettore b-a parallelamente
a se stesso fino a portare la sua origine sulla punta di a e la sua punta sulla punta di b.
Esercizio N. 7
Dimostrare che i vettori u = 6i - 4j + 2k, v = 2i - 6j + 10k, z = 4i + 2j - 8k formano un triangolo
rettangolo.
Perché tre vettori formino un triangolo occorre che sia soddisfatta una delle seguenti due
condizioni:
(a) uno di essi sia uguale alla somma degli altri due;
(b) i tre vettori abbiano somma nulla.
Verifichiamo che nel nostro caso è soddisfatta la condizione (a). Infatti è:
vx + zx = 6 = ux
vy + zy = -4 = uy
vz + zz = 2 = uz
perciò v + z = u
28
Per vedere se il triangolo formato è rettangolo, calcoliamo i prodotti scalari fra i tre vettori,
ovviamente a due a due (poiché non ha senso definire il prodotto scalare di tre vettori): se un
prodotto scalare è nullo, allora il triangolo è rettangolo.
u•v = (6)(2)+(-4)(-6)+(2)(10)=56≠0
v•z = (2)(4)+(-6)(2)+(10)(-8)=-84≠0
z•u = (4)(6)+(2)(-4)+(-8)(2)=0
Da quest’ultima espressione si vede come z e u siano perpendicolari, e come perciò u, v, z formino
un triangolo rettangolo.
Esercizio N. 8
Se u = i+2j–k, v = -i+j-2k, z=i+j-k, trovare (a) u x v, (b) v x u, (c) (u+v) x (u-v), (d) (u x v) x z.
Il prodotto vettoriale, note le componenti dei vettori, è dato dal determinante simbolico:
(a)
i
j
u× v = 1 2
−1 1
k
2 −1
1 −1
1 2
−1 = i
+k
= −3 i + 3 j + 3k
-j
−1 − 2
−1 1
1 −2
−2
(b)
Invertendo l’ordine dei vettori il prodotto vettoriale cambia segno, poiché si invertono due righe nel
determinante simbolico:
v x u = 3i-3j-3k.
(c)
E’ u+v=3j-3k e u-v=2i+j+k quindi
i
j
(u + v) × (u - v) = 0
2
3
1
k
− 3 = 6i − 6 j − 6k
1
(d)
Si dimostra che il triplo prodotto vettoriale è dato da:
(u x v) x z=(u•z)v – (v•z)u
cosicchè otteniamo
(u x v) x z= (1+2+1)v-(-1+1+2)u= 4v-2u= -6i-6k.
Esercizio N. 9
29
Se u = 3i+j-3k, v = i-2j+k, trovare un vettore w, di modulo w=5 che sia perpendicolare sia a u che a
v.
Quando due vettori sono perpendicolari il loro prodotto scalare deve essere nullo, cioè:
w•u = 0
e
w•v = 0,
quindi indicando con (x,y,z) le componenti del vettore w possiamo scrivere:
⎧( xi + yj + zk ) • (2i + 1j − 3k ) = 0
⎪⎪
⎨( xi + yj + zk ) • (1i − 2 j + 1k ) = 0
⎪ 2
⎪⎩ x + y 2 + z 2 = 5
(l’ultima equazione ovviamente deriva dalla condizione sul modulo del vettore).
Sviluppando i prodotti otteniamo:
⎧2 x + y − 3 z = 0
⎪
⎨x − 2 y + z = 0
⎪ x 2 + y 2 + z 2 = 25
⎩
Dalle prime due equazioni del sistema si ottiene che x=z e y=z; sostituendo questi valori nella terza
equazione otteniamo che z=2.89.
Il nostro vettore quindi sarà:
w=2.89i+2.89j+2.89k.
Esercizio N. 10
Se due lati di un triangolo sono formati dai vettori OA e OB quale è la distanza da O del punto
medio M del terzo lato?
B
M
A
O
La distanza del punto O dal punto medio M è data dal modulo del vettore OM; ma questo vettore
può essere espresso come somma dei vettori OA e AM:
30
OM= OA+ AM ;
ricordando che M è il punto medio fra A e B possiamo anche scrivere:
AM = AB/2 = (OB – OA)/2
quindi per il vettore OM otteniamo:
OM= OA+(OB – OA)/2=(2OA +OB – OA)/2= (OB + OA)/2,
per cui la distanza che stiamo cercando vale :
|(OB + OA)/2|
risultato ben noto in geometria.
Esercizio N. 11
Dati cinque vettori unitari uscenti dall’origine delle coordinate, le cui rispettive direzioni formano angoli di 45°
compresi fra θ=0° e θ=180°, determinare la somma: (a) graficamente; (b) algebricamente.
y
(a)
B+D
C
D
B
A
A
E
x
Il vettore somma V può essere espresso come segue:
V = A+B+C+D+E = (A+E) + (D+B) + C ;
osservando la figura si vede subito che A= -E per cui (A+E)=0 ;
i vettori D e B formano fra di loro un angolo di 90°, quindi la loro somma sarà data dalla diagonale
(parallela all’asse y) del quadrato che essi definiscono, per cui ricordando che essi hanno modulo
unitario possiamo scrivere:
(D+B) =
2j.
Il vettore somma quindi sarà:
V = (D+B) + C =
2 j +1j = (1+ 2 )j.
31
(b)
Gli angoli che i vettori A, B, C, D, ed E, formano con l’asse x sono rispettivamente 0°, 45°, 90°,
135° e 180°; i vettori quindi possono essere espressi come segue:
A=1⋅cos(0°)i+1⋅sin(0°)j = 1i + 0j
B=1⋅cos(45°)i+1⋅sin(45°)j = 2 / 2 i + 2 / 2 j
C=1⋅cos(90°)i+1⋅sin(90°)j = 0i + 1j
D=1⋅cos(135°)i+1⋅sin(135°)j = - 2 / 2 i + 2 / 2 j
E=1⋅cos(180°)i+1⋅sin(180°)j = -1i + 0j
Le componenti del vettore somma saranno dati dalla somma delle componenti dei singoli vettori:
V = (1+
2 /2 + 0 -
2 / 2 -1)i + (0 +
2 /2 + 1 +
2 / 2 + 0)j = 0i + (1+ 2 )j = (1+ 2 )j .
Esercizio N. 12
Quali fra i seguenti vettori sono mutuamente perpendicolare? Le terne di numeri indicano le
componenti del vettore.
A(2,3,1);
B(0,0,2);
C(1,-2,0);
D(1,1,-3);
E(9,5,3)
Quando due vettori sono perpendicolari il loro prodotto scalare è nullo, quindi basta verificare tale condizione:
A•B = 2⋅0+ 1⋅0+1⋅2 = 2
⇒
A e B non sono perpendicolari;
A•C = 2⋅1+ 1⋅(-2)+1⋅0 = 0
⇒
A e C sono perpendicolari;
A•D = 2⋅1+ 1⋅1+1⋅(-3) = 0
⇒
A e D sono perpendicolari;
A•E = 2⋅9+ 1⋅5+1⋅3 = 26
⇒
A e E non sono perpendicolari;
B•C = 0⋅1+ 0⋅(-2)+2⋅0 = 0
⇒
B e C sono perpendicolari;
B•D = 0⋅1+ 0⋅1+2⋅(-3) = -6
⇒
B e C non sono perpendicolari;
B•E = 0⋅9+ 0⋅5+2⋅3 = 6
⇒
B e E non sono perpendicolari;
C•D = 1⋅1+ (-2)⋅1+0⋅(-3) = -5 ⇒
C e D non sono perpendicolari;
C•E = 1⋅9+ (-2)⋅5+0⋅3 = -1
⇒
C e E non sono perpendicolari;
D•E = 1⋅9+ 1⋅5+(-3)⋅3 = 5
⇒
D e E non sono perpendicolari.
Esercizio N. 13
Dimostrare che se uno dei vettori del prodotto scalare A•B viene moltiplicato per uno scalare c,
l’angolo φ compreso fra A e B resta invariato.
Per definizione di prodotto scalare:
A•B = ABcosφ ;
32
ma il prodotto scalare può essere anche espresso tramite la somma dei prodotti delle componenti
omonime dei due vettori, quindi possiamo scrivere:
AxBx + AyBy + AzBz = ABcosφ
da cui segue che l’angolo φ è dato dalla seguente relazione:
⎛ A x Bx + A y B y + A z Bz
φ = ar cos⎜⎜
AB
⎝
⎞
⎟⎟ .
⎠
Se adesso moltiplichiamo il vettore A per lo scalare c avremo:
(cA)•B = (cA)Bcosφ1
dove
(cA) = cAxi + cAyj + cAzk
e φ1 indica l’angolo fra i vettori cA e B.
Esprimendo il prodotto scalare come somma dei prodotti delle componenti omonime otteniamo:
cAxBx + cAyBy + cAzBz = (cA)Bcosφ1
per cui il nuovo angolo vale:
⎛ cA x B x + cA y B y + cA z B z
φ1 = ar cos⎜⎜
cAB
⎝
⎞
⎛ A B + A y By + A z Bz
⎟⎟ = ar cos⎜⎜ x x
AB
⎠
⎝
L’angolo φ1 quindi coincide con l’angolo φ.
33
⎞
⎟⎟ .
⎠
Esercizio N. 14
Si consideri il vettore A=3x+y+2z. 1) Determinare il modulo di A. 2) Costruire il vettore B
giacente nel piano xy e perpendicolare ad A. 3) Costruire il versore vers(B). 4) eseguire il
prodotto scalare del vettore C = 2x per A.
1)
|A| = 3 2 + 12 + 2 2 = 14 = 3.74
2)
Quando due vettori sono perpendicolare il loro prodotto scalare deve essere nullo, quindi indicando
le generiche componenti del vettore B con (Bx,By,0) (la terza componente è nulla poiché il vettore
giace sul piano xy), possiamo scrivere:
A•B=0
cioè
3 Bx + 1 By =0
⇒
By = -3 Bx
quindi il vettore B (k, -3k, 0), dove k è un qualunque numero reale, è perpendicolare ad A e giace
nel piano xy.
3)
Per costruire vers(B) basta calcolare il parametro k che rende unitario il modulo del vettore B
calcolato al punto 2):
k 2 + (−3k ) 2 = 1
10k 2 = 1
⇒
k2 =
1
10
⇒
k=±
1
10
quindi abbiamo ottenuto due valori del parametro k a cui corrispondono i due diversi versori
⎛ 1 −3 ⎞
,
,0 ⎟⎟
⎜⎜
⎝ 10 10 ⎠
e
⎞
⎛
1
3
,
,0 ⎟⎟ ;
⎜⎜ −
10 10 ⎠
⎝
i due versori ovviamente hanno la stessa direzione (dovendo essere entrambi perpendicolari ad A e
giacenti sul piano xy) ma verso opposto.
4)
A•C=(3x+y+2z)•(2x)=3⋅2+1⋅0+2⋅0=6
34
Esercizio N. 15
Dati du vettori, A = 3i+4j-5k e B = -i+2j+6k, calcolare: a) il modulo di entrambi; b) il prodotto
scalare A•B; c) l’angolo φ formato fra essi; d) i coseni direttori di entrambi; e) il vettore somma ed
il vettore differenza; f) il prodotto vettoriale.
a)
A= 3 2 + 4 2 + (−5) 2 = 50 = 7.07
B= (−1) 2 + 2 2 + 6 2 = 41 = 6.40
b)
A•B = 3⋅(-1)+4⋅2+(-5) ⋅6= -25
c)
A•B = ABcosφ
-25=7.07⋅6.40⋅cosφ
cosφ = -0.55
φ = 123.5°
d)
Per trovare i coseni direttori (definiti come i coseni degli angoli che il vettore forma con gli assi coordinati) basta
moltiplicare scalarmente il vettore per ciascuno dei versori del sistema di riferimento:
A•i = A⋅1⋅cosα
D'altronde il prodotto scalare si può anche esprimere come somma dei prodotti delle componenti omonime,
quindi possiamo scrivere:
A•i = Ax
quindi otteniamo:
Ax = A⋅1⋅cosα
cosicchè il coseno direttore rispetto all’asse x vale:
cosα = Ax / A =
3
;
50
per gli altri coseni direttori otteniamo:
cosβ = Ay / A =
4
50
;
cosγ = Az / A =
−5
50
Analogamente per i coseni direttori del vettore B avremo:
35
;
−1
cosα = Bx / B =
;
41
cosβ = By / B =
2
;
cosγ = Bz / B =
41
6
;
41
e)
A + B = (3-1)i + (4+2)j + (-5+6)k = 2i+6j+k
A - B = (3+1)i + (4-2)j + (-5-6)k = 4i+2j-11k
f)
Per calcolare il prodotto vettroriale A^B utilizziamo il determinante simbolico sviluppato rispetto alla prima
riga con il teorema di Laplace:
i
j
k
A ^ B = 3 4 − 5 = (24 + 10)i − (18 − 5) j + (6 + 4)k = 34i − 13j + 10k
−1 2 6
Esercizio N. 16
Trovare il volume del parallelepipedo i cui spigoli sono descritti dai vettori: A=i+2j, B=4j,
C = j+3k uscenti dall’origine.
Il volume V del parallelepipedo può essere calcolato come valore assoluto del prodotto misto fra i
tre vettori:
1 2 0
4 0 = 1 * (4 * 3 − 0 * 1) − 2 * (0 * 3 − 0 * 0) + 0 * (0 * 1 − 4 * 0) = 12
0 1 3
V = | A*(B^C)| = 0
36
Esercizio N. 17
Dati due vettori tali che A+B = 11i-j+5k ed A-B = -5i+11j+9k, determinare (a) A e B, (b) l’angolo
compreso tra A e A+B.
(a)
A+B = (Ax+Bx)i+(Ay+By)j+(Az+Bz)k = 11i-j+5k
A - B = (Ax-Bx)i+(Ay-By)j+(Az-Bz)k = -5i+11j+9k
quindi eguagliando le singole componenti otteniamo:
⎧A x + B x = 11
⎨
⎩A x − B x = −5
;
⎧⎪A y + B y = −1
;
⎨
⎪⎩A y − B y = 11
⎧A z + B z = 5
;
⎨
⎩A z − B z = 9
Sommando e sottraendo membro a membro le due equazioni di ciascun sistema si ottiene:
⎧A x = 3
⎨
⎩B x = 8
;
⎧⎪A y = 5
;
⎨
⎪⎩B y = −6
⎧A z = 7
;
⎨
⎩B z = −2
cosicchè
A = 3i+5j+7k ;
B = 8i-6j-2k .
(b)
|A| =
9 + 25 + 49 = 9.11
|A+B| = 121 + 1 + 25 = 12.12
A•(A+B)= 9.11*12.12*cosφ
dove φ è l’angolo fra i vettori A ed (A+B);
d'altronde
A• (A+B)=3*11+5*(-1)+7*5=63
quindi
9.11*12.12*cosφ = 63
cosφ = 63/110.4 = 0.57
φ = 55.2°
37
ESERCIZIO (Serway pag 35 n°39)
Una persona che va a fare una passeggiata segue l’itinerario mostrato in figura:
100m
300m
200m
60°
30°
150m
L’escursione totale consta di quattro tratti rettilinei. Alla fine della passeggiata, qual è lo
spostamento risultante misurato a partire dall’origine?
Ax=100
Bx=0
Cx=-150 (3)1/2/2
Dx=-100
Ay=0
By=-300
Cy=-150/2 = -75
Dy=100(3)1/2
Rx= 100 + 0 - 150(3)1/2/2 – 100 = -150(3)1/2/2 = -129.9 m
Ry= 0 – 300 – 75 + 100(3)1/2 = -375+100(3)1/2 = -201.8 m
R= (Rx2 + Ry2)1/2 = 240
tgθ = Ry/Rx = 1.553
θ = arctg(1.553) = 57° + k 180°
Poiché entrambe le componenti del vettore R sono negative, tale vettore si trova nel III quadrante
cosicché in questo caso dobbiamo scegliere k=1 dal che segue:
θ = 57° + 180° = 237°
Ecco perché, negli esercizi di fisica, non ci può limitare ad utilizzare brutalmente il risultato
fornitoci dalla calcolatrice!
38
ESERCIZIO
Qual è l’angolo d’intersezione tra due diagonali interne di un cubo?
Se consideriamo un cubo di spigolo unitario i cui lati si incontrano nell’origine O di un sistema di
riferimento cartesiano ortogonale. Possiamo individuare, ad esempio, la diagonale d1 che unisce
l’origine O=(0,0,0) con il vertice opposto V=(1,1,1) e la diagonale d2 che invece congiunge il punto
di coordinate (0,0,1) con il punto di coordinate (1,1,0).
z
y
x
Vettorialmente avremo:
d1 = i + j + k
d2 = i +j – k
dove il segno – nella componente z di d2 deriva dal fatto che tale componente è diretta in verso
opposto all’asse z positivo.
Chiaramente, entrambe le diagonali avranno modulo pari a (3)1/2 cosicché:
d1 • d2 = d1 d2 cosφ = (3)1/2 (3)1/2 cosφ = 3 cosφ
D'altronde il prodotto scalare si può anche eseguire come somma dei prodotti delle componenti
dello stesso nome:
d1 • d2 = 1*1 + 1*1 + 1*(-1) = 1
Confrontando le ultime due espressioni si ottiene che
3 cos φ = 1
cioè
cos φ =1/3
da cui si ricava l’angolo d’intersezione cercato φ=70.5°
Chiaramente avremmo potuto scegliere per d2 il vettore
d2 = -i -j +k
In questo caso cos φ’ = -1/3 da cui φ’ = 109.5°, che è ovviamente il supplementare di φ.
39
ESERCIZIO
Dimostrare, utilizzando i vettori a = i, b = j e c = j + k che per il prodotto vettoriale non vale la
proprietà associativa.
k
j+k
j
i
Per rispondere al quesito occorre dimostrare che a^(b^c) ≠ (a^b)^c.
Ora, i vettori b e c non hanno componenti lungo l’asse X e pertanto giacciono entrambi sul piano
YZ; pertanto, il loro prodotto vettoriale (b^c) darà luogo ad un vettore ortogonale al piano YZ che,
come tale, avrà componenti solo lungo l’asse X, cioè sarà del tipo ki dove k è uno scalare. Appare
dunque evidente che tale vettore è parallelo al vettore a cosicchè a^(b^c)=0.
Analogamente i vettori a e b individuano il piano XY e pertanto il vettore (a^b) sarà ortogonale a
tale piano e cioè sarà un vettore parallelo all’asse Z; c invece si trova lungo la bisettrice del piano
YZ e come tale non è certamente parallelo al vettore (a^b). Cosicché (a^b)^c≠0 e quindi
ovviamente a^(b^c) ≠ (a^b)^c. Analogo risultato si sarebbe ottenuto svolgendo esplicitamente il
calcolo dei prodotti vettoriali ad esempio col metodo del determinante simbolico.
ESERCIZIO
Si faccia uso della definizione di prodotto scalare a•b=abcosφ e della relazione a•b=axbx+ayby+azbz
per calcolare l’angolo tra i due vettori seguenti:
a=3i+3j-3k
b=2i+j+3k
Per utilizzare la definizione di prodotto scalare occorre calcolare i moduli dei due vettori:
a=(9+9+9)1/2 = 3 (3)1/2
b=(4+1+9)1/2 = (14)1/2
40
mentre il calcolo della somma dei prodotti delle componenti omologhe fornisce:
a*b=3*2 + 3*1 – 3*3=0
da cui segue che
3 (3)1/2 (14)1/2 cosφ = 0
cosφ = 0
cioè
φ=π/2
ESERCIZIO
Due vettori a e b si sommano; dimostrare che il modulo del vettore risultante non può essere
maggiore di a+b né minore di |a-b|.
A
a
O
a
b
La lunghezza del segmento OA è il modulo del vettore a+b. Ma i tre vettori a, b ed OA formano un
triangolo e, in ogni triangolo, ciascun lato ha ampiezza minore della somma degli altri due e
maggiore della loro differenza. Cosicché dalla geometria segue l’asserto:
|a-b| < |a+b| < |a| + |b|
ESERCIZIO
Quali sono le proprietà di due vettori a e b tali che:
1)
a+b=c
2)
a+b=a-b
3)
a + b =c
ed a + b = c
ed a2 + b2 = c2
1) i vettori a e b hanno stessa direzione e stesso verso
2) il vettore b è nullo
3) i vettori a e b sono ortogonali.
41
ESERCIZIO
Il momento di una forza F, applicata nel punto P, calcolato rispetto ad un polo O, è dato da:
Mo = OP x F.
Se il polo O coincide con l’origine di un riferimento cartesiano ortogonale, e il punto P ha
coordinate (3, -1, 0), sapendo che è F=(2,1,0), trovare il vettore Mo.
Per la definizione stessa di momento di una forza rispetto ad un polo tale vettore sarà ortogonale al
piano individuato da OP ed F (che è il piano XY) e sarà rivolto verso l’alto. In formule si ha che:
i j k
r
r r r
−1 0
3 0 ˆ 3 −1
Mo = OP x F = r x F = 3 - 1 0 = iˆ
− ˆj
+k
= 5 kˆ
1 0
2 0
2 1
2 1 0
e dunque Mo = 5k.
Gli angoli θ misurati con la consueta regola (>0 in senso antiorario e <0 in senso orario) non
costituiscono dei vettori perché la somma di angoli finiti non è commutativa come si evince dalla
figura (da scannerizzare).
OSSERVAZIONI
Non ha senso iterare il prodotto scalare e pertanto non ha senso parlare di proprietà associativa
riferita al prodotto scalare. Infatti la scrittura a*b*c è priva di significato poiché a*b dà come
risultato uno scalare ma il prodotto scalare è definito tra due vettori e ciò dunque ci impedisce di
andare avanti: ciò che otterremmo infatti sarebbe il prodotto semplice tra lo scalare a*b ed il vettore
c ma non il prodotto scalare a*b*c.
Dati due vettori a e b che formano rispettivamente un angolo φa e φb col semiasse positivo delle
ascisse, l’angolo tra essi sarà ovviamente dato dalla differenza φa-φb e pertanto il prodotto scalare tra
i due vettori sarà dato per definizione dal prodotto dei rispettivi moduli per il coseno dell’angolo
compreso cioè
a*b =ab cos(φa-φb)=abcosφa cosφb + absinφa sinφb = acosφa bcosφb + asinφa bsinφb =
axbx+ayby+azbz
col che si è dimostrato (per semplicità con vettori nel piano) che, dalla definizione di prodotto
scalare si ricava la relazione a*b = axbx+ayby+azbz.
42
PERCORSI AZZERAMENTO 2009-2010
TEST DI FISICA
1) Indicare quale delle seguenti relazioni tra le grandezze fisiche è CORRETTA:
A) (lavoro)/(spostamento) = (forza)
B) (massa) . (velocità) = (forza)
C) (massa) . (spostamento) = (forza)
D) (potenza) . (velocità) = (forza)
E) (massa) . (velocità) = forza
2) Un punto si muove alla velocità v = 100 m/s. A quale valore in km/h tale velocità corrisponde?
A) 0,36 km/h
B) 36.000 km/h
C) 360 km/h
D) 10 km/h
E) 98 km/h
3) L’equazione s = ½ a t2 permette di calcolare lo spazio percorso da un corpo. Essa è valida:
A) per qualunque moto accelerato
B) per qualunque moto uniformemente accelerato
C) per un moto uniformemente accelerato a velocità iniziale nulla
D) per qualunque moto
4) Una forza costante è applicata a corpi di massa diversa. L'accelerazione impressa ad ognuno di
essi è:
A) proporzionale alla massa
B) inversamente proporzionale alla massa
C) proporzionale al quadrato della massa
D) non dipende dalla massa
E) non dipende mai dalla forza applicata
5) Un corpo è soggetto contemporaneamente a due forze di 10 Newton. A quale forza risultante è
soggetto il corpo?
A) 20 N
B) 10 √2 N
C) 0 N
D) I dati non sono sufficienti per consentire una risposta
E) Bisogna tener conto del 3° principio della dinamica (azione e reazione)
6) Un wattora (1W x 1h) è equivalente a:
A) 3.600 watt
B) 1.000 calorie
C) 1.000 watt
D) 3.600.000 joule
E) 3.600 joule
43
7) Due automobili di uguale massa viaggiano a velocità rispettivamente uguali a 150 e 100
km/h. In quale rapporto stanno le loro energie cinetiche?
A) (150/100)2
B) (150/100)1/2
C) (150/100)
D) (150/100)/150
E) Non si può calcolare perché non è specificata la massa
8) Un corpo ha una massa di 80 g e un volume di 100 cm3. Ponendolo in acqua, cosa succede?
A) Galleggia sulla superficie
B) Affonda, ma non è possibile prevedere a quale profondità
C) Resta sospeso in prossimità della superficie
D) Resta sospeso in un punto intermedio tra superficie e fondo
E) Va ad adagiarsi sul fondo
9) Nella dinamica dei fluidi ideali:
A) la densità è nulla
B) si trascurano le forze di superficie
C) si trascurano le forze di volume
D) la viscosità è supposta nulla
E) la portata è costante
10) La pressione P esercitata da una colonna di liquido di densità ρ avente altezza h e sezione
di area A, è data da:
A) P = ρ gh
B) P = ρ gh/A dove A è l'area della selezione della colonna
C) P = ρ g
D) per rispondere occorre conoscere la massa della colonna di liquido
E) per rispondere occorre conoscere la temperatura del liquido
11) Come varia la velocità di un liquido che scorre, con flusso stazionario, in un condotto a sezione
variabile? La velocità:
A) aumenta dove la sezione si restringe
B) aumenta dove la sezione si allarga
C) resta immutata in quanto si è fatta l'ipotesi che il flusso sia stazionario
D) diminuisce sempre per effetto della viscosità
E) aumenta sempre con il diminuire dell'altezza
12) Con una trasformazione isobara un gas ideale, inizialmente a 27 °C, è portato a 327 °C; se
il volume iniziale era di 2 litri, quello finale è:
A) 4 dm3
B) 6 litri
C) 4 m3
D) 2,1 litri
E) 300 litri
44
13) In quale processo di propagazione del calore vi è trasferimento di materia?
A) Conduzione
B) Convezione
C) Irraggiamento
D) Evaporazione
E) In nessuno dei casi precedenti
14) Se un gas perfetto subisce una compressione adiabatica allora la sua temperatura:
A) aumenta
B) sale o scende a seconda del tipo di gas
C) rimane costante
D) sale o scende a seconda del grado di isolamento termico raggiunto
E) diminuisce
15) Il ciclo di Carnot è costituito da una serie di trasformazioni di stato che, fissate le temperature
dei serbatoi di calore:
A) possono essere compiute soltanto da un gas perfetto
B) consentono di calcolare con una formula molto semplice il rendimento di macchine ideali
C) possono essere percorse soltanto in verso orario
D) portano il sistema da una condizione di minore ad una di maggiore entropia
E) possono essere effettuate solo cambiando la pressione, ma non il volume
16) Fra le seguenti, tre sono grandezze fisiche fondamentali nel Sistema Internazionale:
A) massa, energia, potenziale
B) tempo, temperatura, potenziale
C) lunghezza, forza, intensità luminosa
D) lunghezza, tempo, energia
E) lunghezza, tempo, corrente elettrica
17) Una slitta di massa m si sta muovendo con accelerazione di 12 m/s2, sotto l’azione di una forza
costante F. Un corpo di massa 2 m viene posto sulla slitta mentre la forza F rimane costante. Che
cosa succede all’accelerazione della slitta?
A) diventa la metà
B) raddoppia
C) triplica
D) diventa un terzo
18) Un carrello inizialmente fermo, raggiunge la velocità di 6 m/s in 2s. Se la forza applicata è
di 60N, quale è la massa del carrello?
A) 10 kg
B) 20 kg
C) 5 kg
D) 120 kg
45
19) Un corpo di massa m al variare del tempo si sposta senza attrito a velocità costante v. La
risultante F delle forze applicate sarà:
A) F = mv
B) F = 0
C) F = m/v
D) F = mg
E) non si può rispondere perché non è dato l'intervallo di tempo
20) Un corpo di massa 100 grammi si trova a 1 metro dal suolo. La sua energia potenziale vale:
A) 0.98 joule
B) 980 watt
C) 0.098 joule
D) 9800 joule
E) 9800 calorie
21) L'energia potenziale di una palla lanciata verso l'alto è massima:
A) nel punto più alto raggiunto
B) al momento del lancio
C) durante la salita
D) nell'istante dell'impatto con il suolo
E) a metà altezza
22) Calcolare il lavoro che bisogna compiere per far variare la velocità di un corpo di massa
m = 2 kg da 2 m/s a 8 m/s.
A) 60 J
B) 24 J
C) 48 N
D) 20 J
E) 12 J
23) Due corpi aventi lo stesso volume e la stessa densità hanno:
A) la stessa superficie
B) la stessa capacità termica
C) la stessa carica elettrica
D) la stessa massa
E) lo stesso numero di atomi
24) Un recipiente ha lo stesso peso sia quando contiene 20 litri di acqua sia quando contiene
15.8 litri di glicerina. Sapendo che la densità dell'acqua è 1000 kg/m3, qual’é la densità della
glicerina?
A) 316 kg/m3
B) 1265 kg/m3
C) 2532 kg/m3
D) 31600 kg/m3
E) 397 kg/L
46
25) In un liquido in condizioni statiche la pressione idrostatica dipende da varie grandezze.
Tuttavia essa NON dipende:
A) dal peso specifico del liquido
B) dalla densità del liquido
C) dalla profondità alla quale si misura la pressione
D) dalla accelerazione di gravità
E) dalla viscosità del liquido
26) La portata Q=S*V di un condotto:
A) è il volume di liquido che attraversa una sezione nell'unità di tempo
B) è la massa di liquido che esce dal condotto
C) si misura in litri . minuti
D) dipende dalla quota del condotto
E) si misura in litri metri
27) Mescolando 1 kg d'acqua avente una temperatura di 80 °C con una eguale massa d'acqua
a 20 °C, quale temperatura assumerà la miscela (supponendo che il calore specifico non
dipenda dalla temperatura stessa)?
A) Bisogna conoscere il valore di tale calore specifico
B) 26,67 °C
C) 60 °C
D) 50 °C
E) 40 °C
28) Un gas si espande a pressione costante. Durante l'espansione è sempre vero che il sistema:
A) compie un lavoro
B) riceve lavoro
C) cede calore
D) si raffredda
E) fa una trasformazione isocora
29) In un gas ideale il prodotto della pressione per il volume:
A) è proporzionale alla temperatura assoluta
B) è indipendente dalla densità
C) raddoppia passando da 10 a 20 °C
D) è sempre costante
E) dipende dalla costante R dei gas perfetti, variabile da gas a gas.
30) Si vuole realizzare una trasformazione ciclica il cui unico risultato sia quello di convertire in
lavoro il calore sottratto ad un'unica sorgente termica. È possibile?
A) È senz'altro possibile
B) È possibile solo nel caso in cui la trasformazione è una trasformazione isotermica
C) È possibile solo nel caso in cui la trasformazione è una trasformazione isocora
D) È possibile solo nel caso in cui la trasformazione è una trasformazione adiabatica
E) È impossibile
47
31) Un'accelerazione dal punto di vista dimensionale, è:
A) (lunghezza)-2/tempo
B) lunghezza/tempo
C) (lunghezza)2/tempo
D) lunghezza/(tempo)2
E) (lunghezza)2/(tempo)2
32) Due grandezze fisiche si dicono omogenee se:
A) si possono moltiplicare tra loro
B) si possono dividere tra loro
C) si possono sommare tra loro
D) sono divisibili per uno stesso numero
E) nessuna delle risposte è corretta
33) Un punto si muove alla velocità v = 72 km/h. A quale valore in m/s tale velocità
corrisponde?
A) 72 m/s
B) 720 m/s
C) 20 m/s
D) 259.2 m/s
E) 7.2 m/s
34) Una pietra è lanciata verso l'alto; nel punto più alto raggiunto dalla pietra:
A) la velocità è massima
B) la velocità è minima
C) l'accelerazione è massima
D) l'accelerazione è nulla
E) l'accelerazione di gravità è nulla
35) L'energia cinetica si conserva:
A) in ogni urto elastico
B) in ogni processo d'urto centrale
C) in ogni urto totalmente anelastico
D) se i corpi si muovono di moto accelerato sopra una retta
E) se una parte dell'energia si trasforma in calore
36) Un corpo di massa m, posto nel vuoto ad un'altezza h dal suolo, inizia a cadere e raggiunge il
suolo con una energia cinetica pari a:
A) E = mgh
B) E = mh/2
C) manca il dato velocità per la valutazione dell'energia cinetica
D) E = 0
E) E = 1/2 mgh2
48
39) Un corpo ha una massa di 20 grammi e un volume di 50 cm3. Ponendolo in acqua, che cosa
succede?
A) Galleggia
B) Affonda
C) Resta sospeso in prossimità della superficie
D) Viene sommerso in profondità
E) Rimane sempre adagiato sul fondo
40) Due corpi solidi omogenei di uguale densità ma volume diverso sono totalmente immersi
nell'acqua:
A) il corpo con volume maggiore riceve una maggior spinta di Archimede.
B) ricevono entrambi la stessa spinta di Archimede.
C) la spinta di Archimede che ricevono dipende dalla forma dei due oggetti.
D) il corpo che pesa di più riceve una spinta di Archimede minore.
E) dipende dall'attrito dell'acqua con la superficie del corpo.
41) La costante R dell'equazione di stato dei gas (PV = nRT) è:
A) un numero adimensionale
B) un numero variabile con T
C) un numero che dipende dal tipo di unità di misura prescelto
D) un numero variabile con P, T e V
E) un numero intero
42) Il rendimento di una macchina termica si esprime:
A) in calorie
B) con un numero puro
C) in chilowattora
D) in joule
E) in erg
43) La temperatura assoluta si misura:
A) in gradi Celsius
B) in Kelvin
C) in gradi Fahrenheit
D) in chilocalorie
E) in joule
44) A pressione costante la relazione esistente tra il volume e la temperatura in un gas è:
A) V . T = costante
B) V = T
C) V = R/T
D) V = costante T
E) V = costante (sempre)
49
45) Comprimendo reversibilmente e adiabaticamente un gas perfetto la sua temperatura:
A) rimane costante, perché non c'è scambio di calore con l'esterno
B) aumenta, perché aumenta la sua energia interna
C) diminuisce, perché diminuisce il volume
D) rimane costante perché in un gas perfetto l'energia potenziale è nulla
E) cresce in modo inversamente proporzionale alla pressione
46). La forza che si esercita tra due cariche elettriche statiche:
A) si misura in volt
B) si misura in newton
C) si misura in farad/metro
D) è inversamente proporzionale alla distanza tra le due cariche
E) si misura in watt
47. Il campo elettrostatico prodotto da una carica puntiforme positiva nello spazio vuoto:
A) ha le linee di forza di forma circolare col centro nella carica
B) è uniforme
C) ha un'intensità direttamente proporzionale al quadrato della distanza dalla carica
D) ha un'intensità inversamente proporzionale alla distanza dalla carica
E) ha le linee di forza rettilinee uscenti dalla carica
48. Il potenziale elettrico è:
A) la forza con cui viene attratta una carica
B) il lavoro fatto da una carica in un'unità di tempo
C) una grandezza fisica che si misura in joule/coulomb
D) nullo per carica ferma
E) il lavoro fatto da una carica sull'unità di superficie
49. Una lampada ad incandescenza da 120 watt ed uno scaldabagno elettrico da 1.500 watt
sono alimentati dalla stessa tensione. Segue che:
A) le resistenze elettriche dei due apparecchi sono le stesse
B) è più elevata la resistenza dello scaldabagno elettrico
C) è più elevata la resistenza della lampada ad incandescenza
D) non si può rispondere senza conoscere le correnti
E) tutte le precedenti risposte sono errate
50. Attraverso un filo di rame lungo 10 m passa una corrente di 8 A. Dimezzando la lunghezza
del filo e mantenendo costante la differenza di potenziale ai suoi capi, l'intensità di corrente:
A) diventa di 16 A
B) diventa di 2 A
C) rimane invariata
D) diventa di 4 A
E) diventa di 64 A
50
51. Due resistenze di 10 ohm ciascuna, sono collegate in parallelo e la differenza di potenziale
ai loro capi è di 200 V. La resistenza equivalente vale:
A) 0,2 ohm
B) 2 ohm
C) 20 ohm
D) 2000 ohm
E) 5 ohm
52. Alcuni conduttori sono collegati in parallelo. La corrente che attraversa ciascuno di essi è:
A) la stessa
B) proporzionale alla rispettiva resistenza
C) inversamente proporzionale alla rispettiva resistenza
D) inversamente proporzionale al quadrato della rispettiva resistenza
E) direttamente proporzionale al quadrato della rispettiva resistenza
53. Il campo elettrico è dimensionalmente:
A) un lavoro per unità di carica elettrica
B) una forza per unità di carica elettrica
C) una forza per unità di intensità di corrente
D) una forza funzione della posizione
E) una carica diviso una forza
54. Due cariche elettriche uguali, poste a una distanza R, si respingono con una forza F. Se R
raddoppia, F:
A) raddoppia
B) si dimezza
C) diventa 1/4 del valore iniziale
D) diventa 4 volte il valore iniziale
E) diventa 1/8 del valore iniziale
55. Il potenziale elettrico:
A) è la forza coulombiana in un punto
B) si misura in ampere
C) ha le dimensioni di un lavoro diviso per una carica
D) è il lavoro fatto per spostare una carica
E) è la potenza elettrica di un generatore
56. Una corrente elettrica I passa, per un tempo t, in un conduttore ai cui estremi esiste una
differenza di potenziale V. L'energia dissipata è:
A) VIt
B) VI
C) V/I
D) It
E) VIt2
51
57. Tra due morsetti A e B di un circuito elettrico sono collegate IN PARALLELO tre
resistenze: due da 200 ohm e una da 100 ohm. La resistenza equivalente tra A e B è:
A) uguale alla media delle resistenze
B) uguale alla resistenza più piccola
C) minore di ciascuna delle resistenze
D) uguale alle resistenze più numerose
E) uguale alla somma delle resistenze.
58. La resistenza di un conduttore ohmico di forma cilindrica è direttamente proporzionale:
A) alla sezione
B) al quadrato della sezione
C) al cubo della sezione
D) alla lunghezza
E) al quadrato della lunghezza
59) Tre lampade sono collegate in parallelo a una d.d.p. costante. Se il filamento di una di esse
si interrompe:
A) si spengono anche le altre
B) aumenta la luminosità delle altre
C) diminuisce l'intensità di corrente nelle altre
D) l'intensità di corrente nelle altre rimane invariata
E) aumenta il consumo di energia delle altre
60. Se r è la distanza tra due cariche puntiformi la forza elettrostatica è proporzionale a:
A) r
B) r2
C) r-2
D) r-1
E) r-3
61. Se le intensità di due cariche vengono raddoppiate e contemporaneamente si raddoppia
anche la loro distanza, la forza di attrazione delle cariche:
A) si raddoppia
B) si dimezza
C) si quadruplica
D) diventa otto volte maggiore
E) rimane inalterata
62. Una carica di + 8 Coulomb si muove da un punto a potenziale di 6 V ad un punto a
potenziale di 2 V. Il lavoro fatto dalla forza del campo è pari a:
A) +32 J
B) +6 J
C) - 2 J
D) - 32 J
E) 16 J
52
63. Indicando con R la resistenza elettrica di un conduttore, con V la differenza di potenziale
applicata agli estremi e con I la corrente che lo percorre, la potenza dissipata per "effetto
Joule" è:
A) P = V . R
B) P = V . R . I
C) P = V . I
D) P = I . R2
E) P = V . R2
64. All'aumentare della lunghezza, la resistenza elettrica di un conduttore di sezione costante:
A) aumenta
B) diminuisce
C) non varia
D) aumenta o diminuisce a seconda della resistività del materiale
E) aumenta nel rame e diminuisce nell'alluminio
65. Il valore della resistenza da aggiungere in parallelo alla resistenza di carico R di un
circuito elettrico per ridurne il valore a 1/3 è:
A) R
B) 2 . R
C) R/2
D) R/4
E) 3 . R
66. Alcune lampadine sono collegate in serie. Cosa succede quando il filamento di una di esse
si interrompe?
A) L'intensità di corrente aumenta
B) Le lampadine si spengono tutte
C) Si spengono solo le due lampadine vicino alla lampadina rotta
D) La potenza dissipata aumenta
E) La potenza dissipata diminuisce (di una lampada su tutte)
67. Se la distanza tra due cariche elettriche di segno opposto viene raddoppiata, la forza di
attrazione:
A) aumenta di un fattore 2
B) aumenta di un fattore 4
C) non varia
D) diminuisce di un fattore 2
E) diminuisce di un fattore 4
68. Se una carica elettrica positiva q è immersa in un campo elettrico E, subisce una forza:
A) F = q/E
B) F = 0
C) F = q2E
D) F = qE
E) E/q
53
69. L'energia potenziale di una carica elettrica q coulomb, posta in una posizione dove il
potenziale vale V volt è:
A) 0
B) qV
C) q/V
D) V
E) V/q
70. Una batteria ideale fornisce una differenza di potenziale di 6 V. Se tra i terminali viene
collegata una resistenza di 24 ohm, quale sarà la potenza dissipata per effetto Joule?
A) 3 W
B) 0,3 W
C) 9 W
D) 1,5 W
E) 84 W
71. La resistenza equivalente a due resistenze in parallelo è:
A) uguale alla più grande delle due
B) uguale alla più piccola delle due
C) maggiore della più grande
D) minore della più piccola
E) uguale alla media tra i valori delle due resistenze
72. Ai capi di una resistenza di 50 ohm si applica una differenza di potenziale di 100 V;
l'intensità della corrente prodotta è:
A) 500 A
B) 2 A
C) 0,5 A
D) 150 A
E) 50 A
73. Indicando con Q la carica elettrica che attraversa nel tempo t la sezione di area A di un
conduttore, si definisce intensità di corrente I:
A) I = Q . A/t
B) I = Q . t
C) I = Q/t
D) I = Q . A . t
E) I = Q/(A . t)
74. La relazione fra la capacità C di un condensatore, la carica Q presente sulle armature e la
d.d.p. V tra queste, è:
A) C = Q/V
B) C = Q . V
C) C = V/Q
D) C = 1/2 . Q . V2
E) C = Q2/V2
54
75. Una spira di filo conduttore immersa in un campo magnetico è percorsa da corrente
quando:
A) il flusso del campo magnetico attraverso la spira varia
B) la resistenza del conduttore è molto piccola
C) l'intensità del campo magnetico è molto grande
D) la spira è schermata da influssi esterni
E) la spira è riscaldata
76. Il modulo del campo di induzione magnetica B generato da un filo rettilineo indefinito ha
una dipendenza dalla distanza D dal filo proporzionale a:
A) D-1
B) D
C) D2
D) D1/2
E) Log D
77. Quattro condensatori uguali ciascuno di tre nanofarad collegati in parallelo costituiscono
un unico condensatore di capacità:
A) 12 microfarad
B) 12 farad
C) 7 farad
D) 7 nanofarad
E) 12.000 picofarad
78. Due conduttori rettilinei paralleli percorsi da corrente continua nello stesso verso:
A) si attraggono
B) si respingono
C) non esercitano alcuna forza reciproca
D) interagiscono con forze che dipendono dal materiale dei conduttori
E) esercitano tra loro forze parallele ai conduttori
79. In generale una calamita non subisce alcuna azione:
A) dal campo magnetico terrestre
B) dalla presenza di un'altra calamita
C) dalla presenza di un filo percorso da corrente
D) dalla presenza di cariche elettriche fisse
E) all'interno di un solenoide percorso da corrente
80. Due condensatori, rispettivamente di capacità C1 e C2, collegati in parallelo, equivalgono
ad un unico condensatore di capacità C tale che:
A) 1/C = 1/C1 + 1/C2
B) C = C1 . C2
C) C = C1 - C2
D) C = C1 + C2
E) nessuna delle risposte precedenti
55
81. Per generare un campo magnetico:
A) si possono usare solo magneti permanenti
B) è necessario sfruttare il campo magnetico terrestre
C) si possono usare opportune distribuzioni statiche di cariche positive e negative
D) si può usare un filo percorso da corrente
E) si deve arrivare oltre alla temperatura di transizione
82. La forza che si esercita tra due fili conduttori rettilinei e paralleli percorsi da correnti
uguali ed equiverse è:
A) ortogonale ai fili e attrattiva
B) ortogonale ai fili e repulsiva
C) nulla
D) parallela ai fili
E) dipende dal diametro dei fili
83. La capacità di un condensatore elettrico si può misurare in:
A) Farad
B) Coulomb Volt
C) Millivolt
D) Ampere . Volt
E) Joule
85. Una particella carica ferma in un campo magnetico uniforme e stazionario, e libera di
muoversi:
A) inizia a muoversi con un moto circolare
B) inizia a muoversi con un moto parabolico
C) inizia a muoversi con un moto rettilineo
D) non inizia a muoversi
E) inizia a muoversi di moto ellittico
56
CINEMATICA
VELOCITA’ MEDIA E VELOCITA’ ISTANTANEA
Consideriamo un punto materiale P che si muove con un andamento parabolico. All’istante t1 si
trova nella posizione x1 e nell’istante t2 si trova nella posizione x2.
x
P2
x2
x1 P1
t1
t2
y
Si vede dalla figura che nell’intervallo di tempo Δt=t2-t1 il punto P ha subito uno spostamento
Δx= x2-x1
Si definisce velocità media il rapporto fra la variazione di posizione Δx e l’intervallo di tempo Δt in
cui tale variazione avviene
Δx x 2 − x1
=
vm =
Δt t 2 − t1
Δx
Il rapporto
rappresenta la pendenza della retta P1 P2 che taglia il grafico x(t) [retta secante].
Δt
La velocità media si misura il m/s
Così definita, la vm, non da informazioni particolareggiate circa il moto in quanto il suo valore
dipende dalla scelta dell’intervallo di tempo Δt in cui viene calcolata
x2
x1
x
x
P2
P1
x1
P1
P2
x2
t1
t2
t
t1
t2
1
Al variare del Δt in cui si misura la vm il suo valore varia: le rette P1 P2 del primo e del secondo
grafico hanno diverse pendenze (nel primo grafico la pendenza è positiva, nel secondo è negativa)
Quindi occorre cercare di definire più rigorosamente cosa si intende per velocità di un punto
materiale ad un determinato istante di tempo. A tal proposito riconsideriamo l’esempio di prima
fissando due istanti t1 e t2
Come si può vedere dal grafico, al tendere di t2 a t1 (tramite posizioni intermedie) la retta secante
tende a diventare la retta tangente la curva x(t) nel punto P1 (cioè all’istante t1 ) considerato. Si
definisce velocità istantanea il limite per Δt→0 della velocità media:
Δx d
v = lim v m = lim
= x
Δt →0
Δt →0 Δt
dt
ovvero la derivata rispetto al tempo della posizione. Essa esprime la rapidità con cui varia la
posizione all’istante t considerato.
Se la velocità media rappresentava la pendenza della retta secante la curva x(t) , la velocità
istantanea rappresenta la pendenza della retta tangente alla curva nel punto P1 considerato.
ACCELERAZIONE MEDIA E ISTANTANEA
Con considerazioni del tutto analoghe a quelle di prima, si definisce accelerazione media il rapporto
tra la variazione di velocità e l’intervallo di tempo in cui questa variazione di velocità avviene:
2
Δv v 2 − v1
=
Δt t 2 − t1
L’accelerazione istantanea è il limite per Δt→0 dell’accelerazione media, che coincide con la
derivata seconda della x(t) rispetto al tempo:
am=
a=
dv d dx d 2 x
=
=
dt dt dt dt 2
La velocità istantanea esprime la rapidità con cui varia la velocità nel tempo. Inoltre si ha che la
accelerazione media am rappresenta la pendenza della retta secante Q1 Q2 al grafico v(t) mentre
l’accelerazione istantanea a rappresenta la pendenza della retta tangente al grafico nel punto Q1
considerato.
MOTO RETTILINEO UNIFORME
Il moto rettilineo uniforme è il moto di una particella che si muove su una retta con velocità
costante. Il nostro obiettivo è trovare la legge oraria (cioè il legame x(t) fra la posizione x e il tempo
t) relativa a tale moto.
Quindi:
v=vm= costante.
Δx x 2 − x1
=
=v
Δt t 2 − t1
Ponendo x1 = x 0 (generica posizione iniziale), t1 = t 0 (generico istante iniziale), x 2 = x (generica
posizione finale), t 2 = t (generico istante finale) si ha:
x − x0
v=
t − t0
x − x 0 = (t − t 0 )v
da cui
x = x 0 + v(t − t 0 )
vm =
Che rappresenta la legge oraria del moto rettilineo uniforme.
Ponendo t 0 = 0 la legge oraria del moto rettilineo uniforme diventa:
x(t ) = x 0 + vt
Questa equazione rappresenta una retta di coefficiente angolare v e intercetta x 0 .
3
v0>0
x
v0=0
x0>0
t
v<0
MOTO UNIFORMEMENTE ACCELERATO
Si tratta di un moto rettilineo con accelerazione costante. Quindi
a = a m = cos t
am =
Ponendo come prima t 2 = t
t1 = t 0
v 2 − v1
=a
t 2 − t1
v1 = v 0 si ha
v2 = v
a=
v − v0
t − t0
da cui
v = v 0 + a(t − t 0 )
Se consideriamo come istante iniziale t 0 = 0 si ha :
v = v 0 + at
Questa non è la legge oraria del moto.
a>0
v0>0
a=0
a<0
4
Immaginiamo ora di sostituire il moto rettilineo uniformemente accelerato con un moto rettilineo
uniforme con velocità uguale alla media aritmetica delle due velocità iniziale v0 e finale v:
vm =
v0 + v
2
v
vm
v0
t
Sostituendo tale valore nella legge oraria del moto uniforme rettilineo si ottiene:
x = x0 + v m t ;
v +v
x = x0 + 0
t
2
Ma v = v 0 + at quindi;
v + v 0 + at
x = x0 + 0
t
2
1
x = x 0 + v 0 t + at 2
2
Questa equazione rappresenta la legge oraria del moto rettilineo uniformemente accelerato; il
grafico è una parabola con la concavità rivolta verso l’alto o verso il basso a seconda del segno
dell’accelerazione.
a<0
a>0
5
Per trovare la relazione tra spazio percorso, velocità ed accelerazione ricaviamo t dalla v = v 0 + at
1
e sostituiamo nella legge oraria x = x 0 + v 0 t + at 2 ricavando, dopo qualche passaggio algebrico:
2
2
v 2 − v0 = 2a( x − x0 ) .
MOTO IN DUE DIMENSIONI
Consideriamo il moto di un corpo in prossimità della superficie terrestre. Sperimentalmente si
osserva che tutti i corpi accelerano con la medesima accelerazione g chiamata: accelerazione di
gravità ( g = 9,81m / s 2 ).
Quindi nella legge oraria del moto uniformemente accelerato,avendo scelto convenzionalmente
l’asse positivo delle y rivolto verso l’alto, bisogna porre a = − g (accelerazione diretta verso il
basso, cioè in verso opposto a quello convenzionalmente scelto come positivo):
1
y = y 0 + v oy t − gt 2
2
Il nostro scopo è quello di trovare l’equazione della traiettoria di un punto materiale in moto in
prossimità della superficie terrestre. Il moto lungo l’asse x, trascurando l’attrito dell’aria, è rettilineo
uniforme, mentre quello lungo l’asse y è rettilineo uniformemente accelerato.
Scrivo le leggi relative ai due moti :
1 2
⎧
⎪ y = y 0 + v oy t + at
2
⎨
⎪⎩ x = x0 + v ox t
v ox = v0 cos ϑ0
v oy = v0 senϑ0
⎧ x = x0 + v0 cos ϑ0 t
⎪
⎨
1 2
⎪⎩ y = y 0 + v0 senϑ0 t − 2 gt
Scegliendo x0=0 e y0=0 si ha
⎧ x = v0 cos ϑ0 t
⎪
⎨
1 2
⎪⎩ y = v0 senϑ0 t − 2 gt
Ricavando t dalla prima e sostituendo nella seconda si ha
x
1
x2
− g 2
y = v0 senϑ0
v0 cos ϑ0 2 v0 cos 2 ϑ0
Quindi l’equazione della traiettoria è
y = tgϑ0 x −
g
x2
2
2
2v0 cos ϑ0
6
Ricordiamo che y = ax 2 + bx + c è l’equazione di una parabola; se a>0 concavità è rivolta verso
l’alto se a<0 la concavità è rivolta verso il basso, c è l’intercetta con l’asse delle y:
Nel nostro caso:
g
y = −
x 2 + tg ϑ 0 x
2
2
2 v 0 cos ϑ 0
a = −
2v0
2
g
cos
2
ϑ0
b = tg ϑ 0
c = 0
La traiettoria è quindi una parabola. E’ possibile ricavare l’altezza massima raggiunta dal punto
materiale durante il suo moto che coinciderà con l’ordinata del vertice di tale parabola.
y
V
ymax
0
YMAX
x
⎛ b 4 ac − b 2
V = ( X v ,Yv ) = ⎜⎜ −
;
4a
⎝ 2a
2
4 ac − b 2 sen 2ϑ0 v0 cos 2 ϑ0
= YV =
=
4a
2g
cos 2 ϑ0
A
⎞
⎟⎟
⎠
2
=
v0
sen 2ϑ0
2g
2
YMAX
v
= 0 sen 2ϑ0
2g
Posso trovare l’ascissa del vertice e raddoppiarla per trovare la gittata ( OA ) cioè la distanza
orizzontale percorsa dal proiettile dal punto di partenza O al punto di arrivo A:
2
tgϑ0
senϑ0 2v0 cos 2 ϑ0
⎛ b ⎞
G = OA = 2 X V = 2⎜ −
=
⎟=
g
cos ϑ0
g
⎝ 2a ⎠
2
2
2v0 cos ϑ0
da cui:
2
v
G = 0 sen2ϑ0 GITTATA
g
Fissato il valore di v 0 si può calcolare per quale valore di ϑ0 si ha il massimo valore della gittata.
La gittata max si avrà quando sen2ϑ0 = 1 , cioè per 2ϑ 0 = 90° , quindi per ϑ 0 = 45° .
7
MOTO CIRCOLARE UNIFORME
E’ il moto di una particella che descrive una traiettoria circolare a velocità costante in modulo. La
direzione del punto materiale è data dalla tangente la circonferenza in ogni punto e pertanto cambia
in ogni istante
r
r1
Δϑ
r
r2
0
P1
r
v1
r
Δr
r
v2
Una particella che si muove a velocità costante in modulo su una traiettoria circolare è sottoposta ad
una accelerazione in quanto il vettore velocità cambia istante per istante la sua direzione. Tale
v2
accelerazione ha modulo pari a
; direzione radiale e verso diretto verso il centro della
r
circonferenza (accelerazione centripeta).
r̂
û t
Introduciamo un versore radiale r̂ che ha la coda nel centro della circonferenza e la punta diretta
radialmente verso l’esterno; introduciamo inoltre un versore tangenziale ut tangente alla
circonferenza e avente verso concorde alla velocità della particella . Quindi seguendo la notazione
vettoriale, il vettore accelerazione centripeta è dato da :
r
v2
a c = − r̂
r
MOTO CIRCOLARE NON UNIFORME
Se una particella descrive una traiettoria circolare con velocità variabile in modulo, essa sarà
soggetta a una accelerazione centripeta dovuta soltanto alla variazione di direzione e a una
accelerazione tangenziale che nasce invece dal cambiamento del modulo della velocità.
Vettorialmente si ha:.
r r
r
dv
v2
a = a c + a t = − r̂ + û t
dt
r
8
Problema: Un astronauta su un pianeta sconosciuto scopre che può saltare per una distanza
orizzontale massima di 30 metri se la velocità iniziale è di 9m/s. Qual è l’accelerazione di gravità
del pianeta?
v0
0
ϑ0
A
2
G=
v0
sen2ϑ0
g
la massima gittata si ha quando ϑ 0 = 45 → sen2ϑ0 = 1
2
2
G MAX
v
= 0
g PIAN
da cui: g PIANETA
v
81
= 0 =
= 2 ,7 m / s 2
G MAX 30
DINAMICA DEL PUNTO MATERIALE
La dinamica studia il moto di un punto materiale in relazione alle cause che lo generano: le forze.
Fu Newton che chiarì il concetto formulando tre leggi che prendono il suo nome:
I legge di Newton: “ciascun corpo persevera nel suo stato di quiete o di moto rettilineo uniforme
eccetto che sia costretto a mutare questo stato da forze impresse”
II legge di Newton: “Il cambiamento di moto di un corpo è proporzionale alla forza impressa e
avviene lungo la retta secondo la quale la forza è stata impressa”
III legge di Newton: “Ad ogni azione corrisponde una reazione uguale e contraria”
Ia legge di Newton (o Principio di Inerzia)
Questa legge può essere considerata come il risultato dell’osservazione che nessuna forza è
necessaria per mantenere in moto un corpo che si muove a velocità costante. Questa legge è
fondamentale per la classificazione dei sistemi di riferimento in due categorie: i sistemi inerziali e i
sistemi non inerziali.
II legge di Newton
r
v
F =m⋅a
La risultante di tutte le forze applicate ad un corpo è uguale alla massa del corpo moltiplicata per la
sua accelerazione. Nell’applicazione di questa legge bisogna fare attenzione a considerare tutte e
sole le forze applicate direttamente al corpo.
L’unità di misura della forza è il Newton (N) che è quella forza che applicata ad un corpo di massa
unitaria (1 kg) procuce un’accelerazione unitaria (di 1m/s2).
III legge di Newton
Supponiamo di avere due corpi di massa m1 ed m2,che interagiscono fra loro. Sia F1,2 , la forza sul
corpo 1 dovuta al corpo 2, e F2,1 la forza sul corpo 2 dovuta al corpo 1. Le due forze hanno lo stesso
modulo, la stessa direzione e verso opposto.
F 1, 2 = − F 2,1
r
F1, 2
1
r
F2,1
2
9
F 1, 2 e F 2,1 sono coppie di azione e reazione: è irrilevante quale delle due venga chiamata azione e
quale reazione. Ovviamente le coppie di azione e reazione non si fanno equilibrio in quanto sono
applicate a corpi diversi.
Problema
Due blocchi M1 e M2 collegati con un filo sono appoggiati su una superficie orizzontale lascia. Al
r
blocco M2 è applicata una forza esterna F . Trovare l’accelerazione di ciascun blocco e la tensione
del filo di collegamento.
N2
N1
T1
M1
T2
r
F
M2
m1 g
m2 g
Per tracciare i diagrammi di corpo libero bisogna applicare la II legge di Newton e considerare tutte
e sole le forze che agiscono direttamente sul corpo considerato.
La forza F, in questo caso, è applicata direttamente solo sul corpo M2. Le forze che agiscono lungo
l’asse y sono la forza peso e la reazione vincolare N, normale al tavolo. Per ciascuno dei due corpi
la forza peso P=mg è bilanciata dalla reazione vincolare N (il moto avviene solo lungo l’asse x).
La forza esterna F agisce su M2 che a sua volta agisce sul filo di collegamento mettendo in tensione
il filo. Indico con T2 la forza che l’estremo destro del filo esercita sul corpo 2 e con T1 la forza che
l’estremo sinistro del filo esercita sul corpo 1:
⎧T1 = m1 a1
⎨
⎩ F − T2 = m 2 a 2
Abbiamo due equazioni nelle quattro incognite T1,T2, a1 e a2 . Se il filo è inestensibile gli
spostamenti dei due corpi sono uguali quindi anche le velocità ( v 2 = v1 ) e le accelerazioni
a1 = a 2 = a
Se il filo ha massa trascurabile (mfilo=0) allora le tensioni ai due estremi del filo sono uguali:
T2 − T1 = m filo a filo
T2 = T1 = T
Quindi avremo:
⎧T = m1 a
⎧T = m1 a
⎧T = m1 a
;⎨
;⎨
⎨
⎩ F − T = m 2 a ⎩ F − m1 a = m 2 a ⎩ F = (m1 + m 2 )a
m1
F
F
⇒T
m1 + m 2
m1 + m 2
Se si sono scritte correttamente le equazioni per i due corpi, sommandole membro a membro otterrò
l’equazione valida per il sistema nel suo complesso
T = m1 a
a=
F − T = m2 a
F + T − T = (m1 + m 2 )a
F = (m1 + m 2 )a
10
ATTRITO
L’attrito nasce da forze di natura elettrostatica fra i corpi a contatto.Visto il numero enorme di
particelle che interagiscono una trattazione teorica completa è complicata. Per questo motivole leggi
dell’attrito sono essenzialmente leggi dedotte sperimentalmente.
Supponiamo di applicare una forza esterna F ad un corpo posto su un piano scabro. A causa della
presenza dell’attrito il corpo rimane fermo. Nei prime tre figure di sotto la forza di attrito statico fs
presente fra la superficie inferiore del blocco e il piano bilancia la forza esterna F.
F
fS = F
F
fS = F
F
fS = F
F*
r
v
il corpo inizia a muoversi
con velocità v
Quando la forza esterna raggiunge un determinato valore F* il corpo inizia a muoversi. Ciò
significa che la forza di attrito statico che si sviluppa fra le superfici a contatto ha raggiunto il
massimo valore e non riesce più a contrastare la forza esterna F. Sperimentalmente si osserva che la
massima forza di attrito statico fs,max dipende dal tipo di superfici a contatto e dalla loro rugosità.
Inoltre si osserva che per mantenere in moto con velocità costante il crpo sul piano scabro è
richiesta una forza esterna inferiore a quella richiesta per metterlo in movimento.
max
REGIME DINAMICO
REGIME
STATICO
F
F esterna
11
Sperimentalmente si osserva che la forza di attrito statico massimo f S , MAX :
1) è approssimativamente indipendente dall’area apparente di contatto.
2) dipende dalla forza premente cioè da quanto il corpo preme sulla seperficie.
Nel caso di un corpo su un piano orizzontale la forza premente è uguale al peso del corpo. Nel caso
di un corpo appoggiato su un piano inclinato la forza premente non è tutto il peso, ma solo la
componente del peso normale al piano inclinato.
f S ,MAX ∝ N
cioè
f S , MAX = μ S N
dove μ S è il coefficiente di attrito statico (adimensionale). μ S è generalmente inferiore all’unità, i
suoi valori tipici sono 0,1 ≤ μ S ≤ 0,9 .
Nel regime dinamico la forza di attrito dinamico è minore della massima forza di attrito
statico: ( f d < f s )
Sperimentalmente si osserva che la forza di attrito dinamico fd :
1) È approssimativamente indipendente dall’area di contatto.
2) è proporzionale alla forza premente.
3) è approssimativamente indipendente dalla velocità relativa con cui si muovono le superfici
Da quanto detto risulta che:
fd ∝ N
fC = μC N
dove μ d è il coefficiente di attrito cinetico dinamico (adimensionale). Poichè f d < f s ,max allora
μd < μS .
QUANTITA’ DI MOTO
Data una particella di massa m in moto con velocità v si definisce vettore quantità di moto p il
prodotto della massa per il vettore velocità v della particella:
m
r
v
r
r
p = mv
La II legge di Newton può essere espressa attraverso la quantità di moto:
r
r
r
r
r
d v dm v d p
.
F = ma = m
=
=
dt
dt
dt
cioè
r dpr
.
F=
dt
Supponiamo che la risultante delle forze agenti su una particella sia uguale a zero:
r
r dpr
∑ F = 0 ⇒ ∑ F = dt = 0
12
r
La quantità di moto p è costante ( legge della conservazione della quantità di moto). Questo
risultato riferito a una singola particella appare abbastanza scontato; è infatti conglobato nella I
legge di Newton:“in assenza di forza il corpo persevera nel suo stato di quiete o di moto rettilineo
uniforme“.
r
Immaginiamo di avere due particelle: una di massa m1 in moto con velocità v1 e quantità di moto
r
r
r
p1 , una seconda con massa m2, velocità v 2 e quantità di moto p 2 :
r
r
p1 = m1 v1 e p 2 = m2 v 2
m1
r
v2
r
v2
r
P1
r
v1
r
P2
m2
Immaginiamo che le uniche forze che moto agiscono siano quelle di interazione fra le due particelle
Per la terza legge di Newton si ha che:
F1, 2 = − F2,1
d p1
d p2
=−
dt
dt
d p1 d p 2
+
=0
dt
dt
d
( p1 + p 2 ) = 0
dt
( p1 + p 2 ) = cos tan te
Quindi se due particelle interagiscono tra loro in assenza di forze esterne la quantità di moto totale
si mantiene costante. Si noti che è la somma delle quantità di moto che si mantiene costante, ma p1
e p2 prese singolarmente variano per effetto della forza di interazione fra i due corpi.
La legge di conservazione della quantità di moto si può riscrivere come:
r
r
r
r
P1,ini + P2ini = P1 fin + P2 fin ;
IMPULSO
Abbiamo visto che la II legge di Newton può essere riscritta come:
r
dp
F=
dt
Quindi la variazione infinitesima di quantità di moto dovuta all’applicazione di una forza F per un
tempo dt è
r r
dp = Fdt
è uguale al prodotto forza F per intervallo di tempo dt . La variazione finita Δp è quindi:
r
r
r
Δp = ∫ dp = ∫ Fdt
13
La quantità
r
I = ∫ Fdt
è deftta Impulso della forza.
r
r
Quindi il risultato di spora Δp = ∫ Fdt può enunciarsi in questo modo: l’impulso di una forza è pari
alla variazione della quantità di moto della particella ( TEOREMA DELL’IMPULSO).
L’impulso di una forza da un punto di vista geometrico rappresenta l’area sotto la curva F(t).
r
L’impulso è un vettore perché la F è un vettore.
F(t)
r
I = Δp
r
I = Δp
tini
tfin
t
FORZE IMPULSIVE
Una forza viene detta impulsiva quando è molto più intensa di tutte le altre forze in gioco nel
problema e dura un intervallo di tempo brevissimo rispetto ai tempi caratteristici del problema.
Supponiamo di avere un grafico di F in funzione di t. Una forza impulsiva è una forza limitata
temporalmente ( Δt è molto piccolo) ma di grande intensità. Un esempio di forza impulsiva è la
forza che viene impressa su una pallina da tennis colpita da una racchetta.
0
t
E’ possibile sostituire la forza impulsiva con una forza costante che abbia lo stesso effetto? La
risposta è si. Infatti ai fini della variazione della quantità di moto ciò che importa è l’area sotto la
F(t). Basta fare in modo che l’area sotto la curva sia uguale all’area (del rettangolo) sotto la retta
orizzontale che rappresenta la forza media costante.
URTI
Chiamiamo urto l’evento in cui due qualsiasi particelle vengono in contatto per un intervallo di
tempo brevissimo rispetto al tempo di osservazione e interagiscono mediante forze di tipo
impulsivo (cioè molto intense e di breve durata). In un processo di urto le forze che si sviluppano
sono forze interne al sistema, le forze esterne in genere sono molto meno intense e possono essere
trascurate. In un processo d’urto si conserva la quantità di moto.
Gli urti si dividono in due grandi categorie:
14
Urti Elastici (oltre alla quantità di moto si conserva anche l’energia cinetica)
Urti Anelastici (si conserva solo la quantità di moto, ma non l’energia cinetica).
Si parla di urto completamente anelastico se, dopo l’urto, le due masse che collidono rimangono
unite insieme.
Urto completamente anelastico:
r
Supponiamo di avere una particella con massa m1 che si muove con una velocità v1 e urta con una
r
particella di massa m2 con velocità v 2 . Entrambe si muovono lungo l’asse x nello stesso verso.
(figura 1). Dopo la collisione le particelle rimangono attaccate formando un unico corpo di massa
m1 + m 2 . Trovare la velocità v delle due masse attaccate dopo l’urto.
m2
r
v1
m1
m1+m2
r
v2
v
r
r
r
r
P1ini + P2ini = P1 fin + P2 fin
m1v1 + m2 v 2 = m1v + m2 v
m1v1 + m2 v 2 = (m1 + m2 )v
v=
m1v1 + m2 v 2
m1 + m2
Urti elastici
Consideriamo due particelle con due masse diverse m1 e m2 e due velocità v1 e v2 .
Immaginiamo che le due particelle urtino elasticamente .
m1 v1ini + m 2 v 2ini = m1 v1 fin + m 2 v 2 fin
1
1
1
1
m1 v12ini + m 2 v 22ini = m1 v12fin + m 2 v 22 fin
2
2
2
2
Le soluzioni sono:
conservazione della quantità di moto
conservazione dell’energia cinetica
m1 − m 2
m2
v1ini + 2
v 2ini ;
m1 + m 2
m1 + m 2
2m1
m − m1
=
v1ini + 2
v 2ini ;
m1 + m 2
m 2 + m1
v1 fin =
v 2 fin
15
LAVORO
Sia data una forza F costante diretta lungo l’asse x applicata a un corpo in moto lungo l’asse x Si
definisce lavoro il prodotto della forza per lo spostamento:
L = F (x 2 − x1 ) = Fd
F
x1
x2
L’unità di misura del lavoro è il Joule (J). Un lavoro unitario (di 1J) si ha quando una forza unitaria
(1N) agisce su una particella che subisce uno spostamento unitario (di 1 m):
1J = 1N ⋅ 1m.
Se la forza F è applica non è nulla direzione dello spostamento si definisce il lavoro come il
prodotto della componente della forza nella direzione dello spostamento moltiplicata per lo
spostamento stesso.
r
F
ϑ
r r
L = (F cos ϑ )d = Fd cos ϑ = F ⋅ d .
Questo lavoro può essere positivo,nullo o negativi a seconda dell’angolo ϑ che la forza forma con
lo spostamento.
L>0 quando 0 ≤ ϑ < 90°
r
F
r
d
(angolo acuto)
y
16
L=0 quando ϑ = 90° (angolo retto).
Infatti la forza non ha alcuna componente nella direzione
dello spostamento.
r
F
r
d
L<0
La componente della forza è diretta in senso
opposto rispetto allo spostamento.
r
F
r
d
SIGNIFICATO GEOMETRICO DEL LAVORO
Sia data una forza Fcostante diretta lungo l’asse x applicata a una particella che si muove dalla
posizione x1 alla posizione x2 . Rappresentando graficamente F in funzione della posizione x si ha :
F(x)
F
x1
x
x2
Il lavoro L = F (x 2 − x1 ) coincide con l’area del rettangolo di figura, cioè con l’area sotto la retta
orizzontale F ( x ) = F = cos tan te .
Supponiamo invece adesso di avere una forza variabile (non costante) cioè che varia da punto a
punto nell’intervallo xiniziale ; x finale Nel k-esimo intervallino di ampiezza Δx K posso considerare
[
]
con buona approssimazione, la forza costante.
In questo tratto Δx K il lavoro elementare sviluppato dalla forza vale:
ΔLK = FK Δx K
LTOT (xi → x f ) = ∑ ΔLK = ∑ FK Δx K
N
K
K =1
17
F
F(x)
Δx K
xi
xf
x
Ma nel k-esimo intervallino non è del tutto corretto considerare la forza costante; questa
“approssimazione” è migliore quanto più la larghezza dell’intervallino Δx K tende a zero. Ciò fa
comprendere che la definizione esatta di lavoro sviluppato da una forza non costante richiede un
“passaggio al limite”.
r
Quindi definisco il lavoro L sviluppato dalla forza F quando una particella si sposta dalla
posizione iniziale xi alla posizione finale x f come il valor limite della sommatoria di Fk Δx k
quando Δx K tende a zero. Esso coincide quindi con l’integrale definito (da xi e x f ) della F(x):
N
xf
K =1
xi
L = lim ∑ Fk Δx K = ∫ F ( x )dx ;
Δxk
Il lavoro sviluppato dalla forza F(x) quando la particella si sposta dalla posizione iniziale xi alla
posizione finale xf rappresenta geometricamente l’area sotto la curva che esprime F in funzione di x.
Nel caso generale la forza F è diretta in una direzione generica nello spazio tridimensionale e anche
la traiettoria della particella è una traiettoria qualsiasi nello spazio.
Consideriamo una generica traiettoria come quella di figura e supponiamo di suddividerla in tanti
“segmenti” Δsk dal punto iniziale A a quello finale B
B
Δsk
.
A
Soffermiamo la nostra attenzione sul k-esimo intervallino la cui ampiezza è data dal modulo dello
r
r
spostamento Δs k . Definisco lavoro elementare ΔL K come la forza FK nel k-esimo intervallino
r
moltiplicata scalarmente per lo spostamento Δs K :
r r
ΔL K = FK ΔS K
Quindi il lavoro totale da A a B è dato da :
r
r
L( A → B ) = ∑ FK ⋅ Δs K
K
18
r
Ovviamente una definizione e rigorosa deve considerare un passaggio al limite per Δs k → 0 :
B r
r
r
r
L( A → B ) = lim ∑ Fk ⋅ Δs k = ∫ F ⋅ ds
Δs k →0
k
A
B
r r
dove ∫ F ⋅ ds ; è l’integrale di linea di F ( di linea perché viene calcolato su una generica linea dello
A
spazio). Nei casi più semplici quest’integrale si riconduce al calcolo di tre integrali nelle variabili
x,y,z.
Esercizio
Una massa m è attaccata ad una molla di costante elastica k. La massa, spostata di x dalla posizione
di equilibrio, è sottoposta ad una forza di richiamo proporzionale allo spostamento : F = − kx . (legge
di Hooke).
x=0
F=-kx
x1
F=-kx
x2
Vogliamo calcolatre il lavoro fatto dalla forza elastica quando la massa si sposta dalla posizione x1
alla posizione x2. Possiamo i scrivere:
r
r
F = −kx î
ds = dx î .
Il lavoro fatto dalla forza elastica è:
x2
B r
B
x2
r
k
1
1
L = ∫ F ⋅ ds = ∫ (− k x î ) ⋅ dx î = ∫ − kx dx = x 2 x1 = kx12 − kx 22 .
2
2
2
A
A
x1
[ ]
Con riferimento alla figura di sopra il lavoroè positivo perché la forza e lo spostamento sono diretti
nello stesso verso . Se invece x2>x1 (la particella si sposta verso destra) la forza e lo spostamento
sono diretti in senso opposto quindi il lavoro sarà negativo.
19
POTENZA ISTANTANEA
r
Supponiamo di avere una particella di massa m soggetta ad una forza F .
F
ds
r
r r
r ds
Il lavoro elementare sviluppato dalla forza F nel tratto ds è dL = F ⋅ ds . Ma dato che v =
si ha
dt
r r
r
ds = vdt quindi dL = F ⋅ v dt : il lavoro dL sviluppato dalla forza F nell’intervallo di tempo dt è
proporzionale all’intervallo di tempo dt durante il quale la forza F agisce.
Si definisce potenza istantanea P la rapidità con cui viene compiuto il lavoro nel tempo:
r r
dL F ⋅ v dt r r
P=
=
= F ⋅v
dt
dt
La potenza si misura in Watt: Un Watt è la potenza sviluppata da una forza che compie il lavoro di
un Joule in un secondo
1Joule
1 Watt =
.
1 sec ondo
TEOREMA LAVORO-ENERGIA CINETICA.
r
Consideriamo un corpo che si muove lungo l’asse x e sul quale agisce una forza F costante.
r
Il lavoro compiuto dalla forza F è:
L = F ( x 2 − x1 ) ;
Dalla seconda legge di Newton F=ma quindi
L = ma( x 2 − x1 )
r
F
m
r
v1
(x2 - x1)
r
v2
r
F
x2
Nella cinematica dell moto rettilineo uniforme avevamo ricavato la seguente relazione:
v 22 − v12 = 2a( x 2 − x1 ).
20
L’espressione del lavoro diventa:
1
1
1
1
L = m2 a( x 2 − x1 ) = m v 22 − v12 = mv 22 − mv12 ;
2
2
2
2
1
La quantità mv 2 viene definita energia cinetica :
2
1
ECIN = mv 2
2
Quindi
L = E CIN , 2 − E CIN ,1 = ΔE CIN
(
)
Questo risultato può essere generalizzato al caso di una particella soggetta ad una forza qualsiasi in
moto lungo una traiettoria qualsiasi.
CAMPI DI FORZE CONSERVATIVI
r
Se in una regione dello spazio è definito un vettore A
⎧ Ax ( x , y , z )⎫
⎪
⎪
A( x , y , z ) ≡ ⎨ Ay ( x , y , z )⎬ .
⎪
⎪
⎩ Az ( x , y , z )⎭
r
si dice che è definitoun “campo vettoriale” A . Da un punto di vista pratico definire una funzione
vettoriale A(x,y,z) significa assegnare le tre funzioni scalari Ax(x,y,z)), Ay(x,y,z)), Az(x,y,z)).
Una forza è detta conservativa (o un campo di forze è detto conservativo) se il lavoro da essa
compiuto, quando una particella si sposta da un punto iniziale P1 ad un punto finale P2, non
dipende dal percorso seguito, ma soltanto dalle posizioni iniziale e finale. Questa definizione è
logicamente equivalente ad affermare che il lavoro fatto dalla forza in un percorso chiuso è uguale a
zero.
L indipendente dal percorso
Forza conservativa
Lavoro in un percorso chiuso uguale a zero
r r
F
∫ ⋅ ds = 0
Sia data una forza indipendente dalla posizione (uniforme), ad esempio la forza di gravità (che è la
più semplice da trattare, ma tutto quello diremo vale per qualsiasi campo di forze uniformi
(indipendenti dalla posizione).
Consideriamo un corpo di massa ml che si sposta da un punto P1 a quota y1 ad un punto P2 a quota
y2 . La forza peso agente su di esso è Fy = − mg ˆj ; il lavoro fatto dalla forza peso è:
L(P2 → P1 ) = −mg ( y 2 − y1 ).
negativo in quanto lo spostamento è verso l’alto mentre la forza è diretta verso il basso.
21
y2
y1
y=0
Consideriamo ora uno spostamento su una traiettoria qualsiasi (non verticale) si ha che:
P2
r r
L(P1 → P2 ) = ∫ Fds
P1
r
Lo spostamento può essere scritto come ds = dx î + dy ˆj , mentre la forza peso ha solo la
componente y F = −mg ˆj . Il lavoro elementare fatta da F del tratto ds è quindi:
r r
dL = F ⋅ ds = Fy dy = −mgdy
Il lavoro totale per andare da P1 a P2 è quindi:
y2
L(P1 → P2 ) = ∫ − mgdy = −mg [ y ]y12 = −mg ( y 2 − y1 );
y
y1
P2
P1
y2
y1
Il risultato finale del calcolo del lavoro su un percorso generico non contiene alcuna informazione
sulla traiettoria eseguita, ma contiene solo l’informazione della quota iniziale e di quella finale.
Questo è proprio quanto richiede la definizione di forza conservativa. Si può concludere quindi che
tutti i campi di forza uniformi sono conservativi.
22
FORZE CENTRALI
Altri esempi di forze conservative sono:
-forza gravitazionale tra due masse.
-forza elettrostatica tra due cariche elettriche.
-forza elastica che una molla esercita su una massa ad essa attaccata.
Questi sono esempi di forze centrali. Un campo di forze è detto centrale se la forza è diretta sempre
verso un punto fisso detto centro di forza O (o in verso opposto) e la sua intensità dipende soltanto
dalla distanza r dal centro di forza.
F
O
In notazione vettoriale:
r r
F (r ) = F (r )rˆ
Tutti i punti che stanno sulla sfera di centro O e raggio r sono soggetti ad una forza della medesima
r
intensità.(la forza centrale non dipende da r vettore, ma da r distanza dal centro di forza).
Preso come verso positivo quello indicato dal versore radiale uscente dal centro di forza, se
F (r ) > 0 la forza è repulsiva(ed è diretta nello stesso verso del versore radiale), mentre se F (r ) < 0
la forza è attrattiva (ed è diretta nel verso opposto a quello del versore radiale)
r̂
r̂
F (r ) > 0
F (r ) < 0
E’ possibile dimostrare che tutte le forze centrali sono conservative, osservando che il lavoro fatto
da una forza centrale lungo un percorso qualsiasi non dipende dal percorso seguito ma solo dalla
posizione iniziale e finale.
ENERGIA POTENZIALE
Data una forza conservativa si definisce variazione di energia potenziale il lavoro, cambiato di
segno, compiuto dalla forza conservativa quando la particella si sposta dalla posizione iniziale P1
fino a quella finale P2:
P2
r
r
ΔU = U (P2 ) − U (P1 ) = − ∫ F (r ) ⋅ ds .
P1
Dalla definizione risulta chiaro che si può parlare di energia potenziale solo per forze conservative.
Come vedremo più avanti, il segno meno nella definizione è inserito per potere esprimere la legge
di conservazione dell’energia nella forma energia cinetica + energia potenziale = costante.
23
Se si decide di fissare il punto iniziale P0 e di assegnare ad esso un valore arbitrario dell’energia
potenziale U(P0)=U0 è possibile definire l’energia potenziale nel generico punto P attraverso la
relazione:
P r
r
U (P ) − U (P0 ) = ∫ F ⋅ ds ;
P0
P
r r
U (P ) = U (Po ) − ∫ F ⋅ ds
P0
E’ solo la variazione di energia potenziale ad avere significato fisico L’energia potenziale in un
punto assume un valore diverso a seconda del valore scelto per l’energia potenziale U0 della
posizione iniziale. Infatti l’energia potenziale U (P0 ) nel punto iniziale è scelta arbitrariamente.
Energia potenziale gravitazionale.
Essa dipende solo dall’altezza y perché il lavoro la forza F dipende solo da y.
m
y
y=0
Abbiamo visto che il lavoro fatto dalla forza di gravità quando la massa m si sposta dalla quota y0
alla quota y è:
L( y0 → y ) = −mg ( y − y0 );
ma
ΔU ( y0 → y ) ≡ − L( y0 → y )
quindi
U ( y ) − U ( y0 ) = −[− mg ( y − y0 )] = mg ( y − y0 ) = mgy − mgy0
E’ possibile scegliere la quota di riferimento y 0 = 0 ed assegnare arbitrariamente l’energia
potenziale alla quota di riferimento pari a zero. Inquesto modo l’energia potenziale di un corpo di
massa m a quota y nel campo gravitazionale è semplicemente:
U ( y ) = mgy
24
Energia potenziale elastica
F=-kx
x0
F=-kx
x
Il lavoro fatto dalla molla quando la massa si sposta da x0 a x è:
1
1
L(x 0 → x ) = Kx 02 − Kx 2 ;
2
2
La variazione di energia potenziale elastica è quindi:
P r
r
1
1
U ( x ) − U ( x0 ) = − ∫ F ⋅ ds = − Kx02 + Kx 2 ;
2
2
P0
Se scelgo come punto di riferimento x0 la posizione di riposo della molla (x0=0) e pongo
arbitrariamente che l’energia potenziale U ( 0 ) = 0 si ottiene
1
U ( x ) = Kx 2 .
2
In alcuni problemi capita di dover calcolare la forza conoscendo l’espressione analitica dell’energia
potenziale. Per semplicità consideriamo un problema unidimensionalein cui la forza F e l’ energia
potenziale U sono funzione della sola variabile x.
x
ΔU = − ∫ F ( x )dx
x0
dU = − F ( x )dx
Dividendo ambo i membri per dx
dU ( x )
= −F( x )
dx
Cioè:
F( x ) = −
dU
;
dx
La forza è uguale a meno la derivata dell’energia potenziale. La forza è sempre diretta nel verso in
cui l’energia potenziale diminuisce.
25
Nel caso della forza di gravità U ( y ) = mgy quindi F ( y ) = −
dU ( y )
d (mgy )
=−
= − mg che è
dy
dy
l’espressione della forza peso.
Nel caso della molla, l’energia potenziale elastica è: U ( x ) =
1 2
Kx da cui:
2
⎞
⎛1
d ⎜ Kx 2 ⎟
dU ( x )
2
⎠ = − Kx
F =−
=− ⎝
dx
dx
che è esattamente la forza di Hooke.
ENERGIA MECCANICA TOTALE
Abbiamo definito la variazione di energia potenziale ΔU tramite il lavoro cambiato di segno fatto
dalla forza conservativa F.
ΔU = − L ……….valida per forze conservative
D’altra parte abbiamo dimostrato (teorema dell’energia cinetica) che il lavoro fatto da una qualsiasi
forza F è pari alla variazione dell’energia cinetica:
L = ΔE CIN valida per qualsiasi forza (conservativa o non conservativa)
Eliminando L fra le due relazioni di sopra si ottiene:
ΔU = − ΔECIN
ΔECIN + ΔU = 0
Questa relazione può essere riscritta come:
Δ(ECIN + U ) = 0
Definisco energia meccanica totale la somma di energia cinetica ed energia potenziale:
ETOT = ECIN + U ;
Quindi:
ΔETOT = 0 .
cioè
ETOT= costante.
Quindi in un campo di forze conservative l’energia meccanica totale della particella, somma
dell’energia cinetica e dell’energia potenziale, si mantiene costante. Questa rappresenta la legge di
conservazione dell’energia meccanica:
26
Esempio: campo gravitazionale
Consideriamo l’energia meccanica totale di una particella nel campo gravitazionale in prossimità
della superficie terrestre. Quando la particella si sposta da un punto iniziale P1 a un punto finale P2
l’energia meccanica totale deve rimanere la stessa:
ETOT ,1 = ETOT , 2
E CIN ,1 + U 1 = E CIN , 2 + U 2
1 2
1
mv1 + mgy1 = mv 22 + mgy 2
2
2
y1
m
y2
y=0
Possiamo ricavare la velocità raggiunta alla quata y2 dalla particella che parte dalla quota y1 con
velocità v1:
1 2 1 2
mv 2 = mv1 + mg( y1 − y 2 )
2
2
v 2 = v12 + 2 g ( y1 − y 2 )
FORZE NON CONSERVATIVE E VARIAZIONE DELL’ENERGIA MECCANICA
TOTALE
Vediamo cosa succede quando abbiamo a che fare con forze non conservative come quelle di
attrito. Supponiamo che una particella di massa m sia soggetta ad una forza non conservativa e a
una conservativa.
r
FC
r
FnC
ò
r
r
r
FTOT = FC + FNC ;
27
(
)
r
r
r
r
r
r
r
L = ∫ FC + FNC ⋅ ds = ∫ FC ⋅ ds + ∫ FNC ⋅ ds = LC + L NC
Ma il lavoro fatto dalla forza conservativa è pari a meno la variazione dell’energia potenziale:
LC = − ΔU .
Per il teorema dell’energia cinetica, a contribuire alla variazione dell’energia cinetica del sistema
concorrono entrambe le forze:
LTOT = ΔE CIN
ΔECIN = LTOT = LC + L NC
ΔECIN = − ΔU + L NC ;
ΔECIN + ΔU = LNC ;
Δ(U + E CIN ) = L NC
ΔETOT = L NC
Se su una particella agisce una forza non conservativa la variazione dell’energia meccanica totrale
è uguale al lavoro fatto dalla forza non conservativa.
Un esempio di forza non conservativa è la forza di attrito. La forza di attrito in particolare si oppone
sempre allo spostamento, quindi il lavoro compiuto dalla forza di attrito è sempre negativo L NC < 0 .
ΔETOT = L NC < 0
ETOT fin − ETOTini < 0 ;
ETOT fin < ETOT , iniz ;
Abbiamo quindi perso energia. Sperimentalmente si osserva un riscaldamento delle superfici a
contatto. Se si generalizza il concetto di energia totale per includere l’energia termica allora si può
estendere la legge di conservazione dell’energia. Questo sarà argomento della termodinamica.
28
MECCANICA DEI FLUIDI
Gli stati di aggregazione della materia sono tre: gas, lìquido e solido. Un gas non ha né volume né
forma propri: si distribuisce uniformemente in tutto il volume a disposìzìone. Un liquido ha volume
proprio e assume la forma del recipiente che lo contiene. Un solido ha volume e forma propri. In
natura esiste anche un quarto stato della materia: lo stato di plasma. La materia allo stato di plasma
è costituita da un gas completamente ionizzato (formato da nuclei ed elettroni liberi)
Per fluido si intende genericamente un liquido o un gas. Una caratteristica propria dei fluidi è la loro
capacità di scorrere.
Un fluido è caratterizzato dalla sua densità ρ definita come il rapporto tra massa e il volume
m
occupato ρ =
e dalla sua viscosità che è l’equivalente, nella dinamica dei fluidi (fluido in moto),
V
dell’attrito inevitabilmente presente nel moto di un corpo su una superficie.
Si dice perfetto o ideale un fluido incomprimibile e in la cui viscosità (attrito interno) è nulla. Nei
fluidi reali, a differenza dei fluidi ideali, è presente un attrito interno dovuto alle forze di coesione
tra le particelle del fluido e di adesione tra fluido e pareti del recipiente
Un fluido reale (viscoso) può essere considerato ideale se è fermo in quanto la viscosità entra in
gioco solo se il fluido è in movimento.
Un fluido esercita una forza non solo contro la parete del recipiente che lo contiene, ma anche sulle
altre parti del fluido stesso. Tale forza è sempre perpendicolare a una qualunque superficie immersa
nel fluido, comunque essa sia orientata. Il rapporto tra la forza e la superficie definisce la pressione
esercitata dal fluido sulla superficie.
Pressione:
P=
F
S
Unità di misura nel S.I. Pascal (Pa) = N/m2
Per la misura della pressione di un fluido esistono anche altre unità di misura
1 atm = 101325 Pa = 760 mmHg
Legge di Pascal
Una qualunque variazione di pressione applicata in un punto di un fluido si trasmette inalterata in
tutti i punti del fluido e alle pareti del recipiente che lo contiene.
Se si considera un contenitore con un'estremità libera in modo tale da poter esercitare una forza su
un liquido tramite un pistone, tale forza si trasmette inalterata in tutti i punti dei fluido. Praticando
dei fori alle pareti, il liquido fuoriesce allo stesso modo da tutti i buchi.
Se cade questa ipotesi, in un fluido si distinguono due tipi di forze.
Legge di Stevino
In un fluido in equilibrio nel campo di gravità la pressione varia con la profondità all’interno del
fluido stesso.
29
Se ρ è la densità dei fluido, g è l'accelerazione gravitazionale, p0 la pressione sulla superficie
libera del fluido e h la profondità all’interno del fluido la legge di variazione della pressione con la
profondità è:
p=p0+ ρ g h
Il termine ρgh rappresenta il peso di una colonna di fluido di base unitaria e altezza h.
La pressione idrostatica non dipende dalla forma del recipiente che
contiene il fluido ma solo dalla profondità h.
Principio dei vasi comunicanti
Dati alcuni contenitori aventi forme diverse e tra loro comunicanti, se si versa del fluido nel primo,
tutti i contenitori si riempiono di liquido fino alla stessa altezza. Infatti a parità di profondità si deve
avere la stessa pressione, condizione che si verifica solo se le colonne di fluido sono uguali in tutti i
contenitori.
Principio di Archimede
Un corpo immerso in un fluido riceve una spinta dal basso verso l’alto pari al peso del volume di
fluido spostato.
FA
Un corpo galleggia se il suo peso è inferiore a quello del volume d’acqua spostato, e quindi se la sua
densità è inferiore a quella dell’acqua.
Portata di un condotto
La portata (Q) di un condotto rappresenta il volume di fluido che attraversa una sezione del
condotto in un secondo (si misura in m3/s).
Equazione di continuità
Ipotizzando il fluido incomprimibile e indicando con v1 e v2 le velocità del fluido nelle due sezioni
S1 e S2 del condotto la legge di conservazione della massa implica che la portata deve essere
costante:
Q = S v = costante
30
cioè
S 1 v1 = S 2 v 2
Velocità v e sezione S sono inversamente proporzionali: maggiore è 'la sezione del condotto,
minore è la velocità del liquido che vi scorre
Teorema di Bernoulli
Il teorema lavoro-energia cinetica applicato ad un fluido incompressibile e non viscoso in moto
stazionario e irrotazionale si traduce in una relazione nota come teorema di Bernoulli.
Si consideri un condotto in cui scorre un fluido di densità ρ e si fissi l'attenzione su due punti. Si
indichi con v1, e v2 i moduli delle velocità del fluido, con P1, e P2 le pressioni del fluido e con h1 e h2
le altezze dei due punti rispetto a un riferimento orizzontale.
1
1
p1 + ρ g h1+ ρ v12 = p2 + ρ g h2 + ρ v22
2
2
Se in un condotto orizzontale la sezione diminuisce, la velocità del fluido che la attraversa aumenta
(equazione di continuità) e la sua pressione diminuisce.
Teorema di Torricelli
In un recipiente contenente un liquido (non viscoso) al quale è stato praticato un foro a una
profondità h, si ha che la velocità di efflusso del liquido dal foro è data dalla relazione:
v = 2 gh
Si noti che il risultato trovato è uguale alla velocità che acquista un corpo soggetto alla sola forza di
gravità cadendo da una altezza h.
31
Tre ragazzi, tutti di uguale massa m = 37.4 kg, costruiscono una zattera con tronchi di diametro d =
0.32 m e lunghi l = 1.77 m. Quanti tronchi sono necessari per tenere a galla i ragazzi?
(ρlegno = 757.7 kg/m3)
Soluzione
m
m
m = 37.4 kg
m
d = 0.32 m
l = 1.77 m
ρlegno = 757.7 kg/m3
d
Una zattera costruita con il minore numero di tronchi possibile tiene a galla i ragazzi restando quasi
completamente immersa (“condizione peggiore”) La situazione è schematizzata in figura: i tronchi
sono interamente sommersi.
Affinché il sistema zattera+ragazzi galleggi, la spinta di Archimede FA deve essere uguale al peso
totale Ptot dei ragazzi e della zattera, cioè:
FA = Ptot
La spinta di Archimede FA è pari al peso del volume di fluido spostato. Detto V il volume di un
tronco ed n il numero di tronchi utilizzati, nella condizione peggiore (tronchi completamente
immersi in acqua), il volume di acqua spostato è semplicemente nV. La spinta di Archimede assume
quindi il valore:
FA = ρacqua (n V) g
con V = π (d/2)2 l = 3.14⋅(0.32 / 2)2⋅ 1.77 = 0.14 m3
Il peso totale Ptot da sostenere è dato dalla somma del peso dei tre ragazzi più il peso degli n tronchi,
cioè:
Ptot = Pragazzi + Ptronchi = 3 m g + n ρlegno V g
Imponendo che la spinta di Archimede bilanci il peso dei tre ragazzi e degli n tronchi, ricaviamo il
numero di tronchi necessari per mantenere a galla i ragazzi:
ρacqua n V g = 3 m g + ρlegno n V g
da cui
ρacqua n V - ρlegno n V = 3 m
e quindi
n=
3m
3 ⋅ 37.4
=
≅ 3 .3
V ( ρ acqua − ρ legno ) 0.14 ⋅ (1000 − 757.7)
Il valore di n ottenuto non è intero. Ciò significa che solamente 3 tronchi, anche completamente
immersi, non sono sufficienti a mantenere a galla i tre ragazzi (FA < Ptot). Quindi occorrono almeno
quattro tronchi per tenere a galla i ragazzi. Ovviamente i tronchi non saranno completamente
immersi in acqua (perché altrimenti FA > Ptot), ma solo quanto basta (Vimm < V) affinché la spinta di
Archimede uguagli il peso dei tre ragazzi e dei quattro tronchi.
32
2) Due torrenti confluiscono in un fiume. Uno dei due torrenti ha una larghezza di l1 = 8.2 m, una
profondità di h1 = 3.4 m e una velocità di scorrimento di v1 = 2.3 m/s. L’altro torrente ha una
larghezza di l2 = 6.8 m, profondità di h2 = 3.2 m e velocità di v2 = 2.6 m/s. La larghezza del fiume è
di l3 = 10.5 m e la velocità di flusso è di v3 = 2.9 m/s. Qual è la sua profondità?
Soluzione
l1 = 8.2 m
h1 = 3.4 m
v1 = 2.3 m/s
l1
l2 = 6.8 m
v1
l3
v3
h2 = 3.2 m
v2 = 2.6 m/s
v2
l2
l3 = 10.5 m
v3 = 2.9 m/s
h3 = ?
La somma dei volumi di acqua portati per unità di tempo dal torrente 1 e dal torrente 2 deve essere
uguale al volume di acqua portata via dal fiume. L’equazione di continuità, in questo caso, si scrive
come:
v1 S1 + v2 S2 = v3 S3
dove le sezioni S dei fiumi si calcolano moltiplicando le rispettive larghezze per le rispettive
profondità (l·h) quindi:
v1 l1 h1 + v2 l2 h2 = v3 l3 h3
da cui:
h3 =
v1l1 h1 + v 2 l 2 h2 2.3 ⋅ 8.2 ⋅ 3.4 + 2.6 ⋅ 6.8 ⋅ 3.2
=
= 3.95 m ≈ 4 m
v3 l 3
2.9 ⋅ 10.5
33
3) Qual è l’area minima Smin di un blocco di ghiaccio di spessore h = 50 cm che galleggia in acqua,
affinché possa sostenere un’automobile di massa M = 1600 kg? (ρghiaccio = 920 kg/m3)
Soluzione
h = 50 cm = 0.5 m
M
M = 1600 kg
h
ρghiaccio = 920 kg/m3
Smin
Smin = ?
L’area minima Smin del blocco di ghiaccio necessaria affinché l’automobile M possa galleggiare si
ricava imponendo che il blocco di ghiaccio resti immerso in acqua per tutto il suo spessore.
La spinta di Archimede in queste condizioni vale quindi:
FA = Pacqua spostata= ρ acqua Vghiaccio g = ρ acqua (Smin h) g
dove Smin è la sezione del blocco di ghiaccio ed h la sua altezza.
Il peso totale da sostenere è:
Ptot = Pautomobile + Pghiaccio = M g + ρghiaccio (Smin h) g
Il sistema blocco+automobile galleggia (con il blocco completamente immerso) se la spinta di
Archimede uguaglia il peso totale del blocco di ghiaccio e dell’automobile:
FA = Ptot
ρ acqua Smin h g = M g + ρghiaccio Smin h g
da cui
S min =
M
1600
=
= 40 m 2
h( ρ acqua − ρ ghiaccio ) 0.5 ⋅ (1000 − 920)
34
Il peso apparente in acqua di un lingotto di metallo di massa m = 15 kg è 130.5 N. Qual è la sua
densità?
Soluzione
m = 15 kg
P’ = 130.5 N (peso apparente in acqua)
m
P
(peso reale)
FA
(spinta di Archimede)
ρacqua = 1000 Kg/m3
P
FA
Il peso apparente in acqua non è altro che la differenza fra il peso P del corpo e la spinta di
Archimede FA. Quindi:
P’ = P - FA
da cui
FA = P – P’ = mg – P’ = 15·9.8 – 130.5 = 16.5 N
D’altra parte la spinta di Archimede è pari al peso del volume di fluido spostato, cioè:
FA = ρacqua V g
dove V è il volume del lingotto. Dall’equazione di sopra possiamo ricavare il volume del lingotto:
V =
FA
ρ acqua g
=
16.5
= 1.68 × 10 −3 m 3
1000 ⋅ 9.8
La densità del lingotto è quindi:
ρ lingotto =
m
15
=
= 8.9 × 10 3 kg / m 3
−3
V 1.68 × 10
35
TERMODINAMICA
UNIVERSO TERMODINAMICO
Sistema aperto.
Se tra il sistema e l’ambiente avvengono scambi di energia e di materia il
sistema è detto aperto. Ad esempio, se il sistema è costituito da un liquido in
ebollizione e l’ambiente dal recipiente che contiene il liquido, dall’atmosfera esterna
compreso il vapore e dalla sorgente di calore, nel processo di ebollizione si ha
trasformazione di liquido in vapore e quindi passaggio di materia dal sistema all’ambiente;
inoltre vi è certamente passaggio di energia dall’ambiente al sistema tramite la sorgente di
calore.
Particelle
Energia
Il sistema si dice chiuso se sono esclusi scambi di materia, ma si
hanno solamente scambi di energia. ritornando all’esempio precedente, il
liquido è contenuto in un recipiente chiuso, a contatto con la sorgente di calore; il
vapore prodotto rimane all’interno del sistema.
Sistema isolato.
Il sistema è detto isolato se non avvengono scambi di energia e di materia con
l’ambiente.
L’universo termodinamico formato da un sistema e dal suo ambiente è da considerarsi
come un sistema isolato.
La Termodinamica descrive il comportamento di sistemi complessi per
mezzo di un piccolo numero di variabili macroscopiche che si
riferiscono alle caratteristiche globali del sistema:
p, V , T
Le poche variabili macroscopiche utilizzate per la descrizione del sistema
sono legate ai nostri sensi e possono, in generale, essere misurate
direttamente
Le leggi fondamentali della Termodinamica non dicono nulla riguardo al
fatto che la materia è costituita da atomi, cioè non viene fatta alcuna ipotesi
particolare sulla struttura della materia.
Per dirla in breve la descrizione macroscopica di un sistema implica la
specificazione di poche proprietà fondamentali misurabili.
descrizione microscopica di un sistema
da un punto di vista microscopico si considera il sistema come costituito da
un numero enorme N di molecole, ciascuna delle quali può trovarsi in uno di
vari possibili stati, le cui energie sono rispettivamente E1, E2, ....
Si fa l'ipotesi che le molecole interagiscano reciprocamente quando vengono
a collisione, attraverso forze agenti a una certa distanza.
Si fa uso dei concetti di probabilità e si assume che lo stato di equilibrio del
sistema sia lo stato di più alta probabilità.
Il problema fondamentale consiste nel determinare, una volta che si sia
raggiunto l'equilibrio, il popolamento degli stati, cioè il numero di molecole
che si trovano in ogni stato energetico molecolare.
La descrizione del sistema viene fatta mediante grandezze relative alle
particelle, quali velocità, energia, massa, momento angolare,
comportamento durante le collisioni.
E' evidente quindi che la descrizione microscopica ha le seguenti caratteristiche,
opposte alla descrizione macroscopica:
1)si fanno ipotesi sulla struttura della materia, cioè si postula l'esistenza di
molecole, si fanno ipotesi sul loro moto e sul tipo di urti;
2) bisogna specificare molte quantità
3) le quantità specificate non sono direttamente collegate ai nostri sensi
4) queste quantità, in genere, non possono essere misurate direttamente
La relazione fra i due punti di vista sta nel fatto che quelle poche proprietà
direttamente misurabili, la cui determinazione costituisce la descrizione
macroscopica, sono in realtà medie nel tempo di un gran numero di
caratteristiche microscopiche.
Ad esempio la pressione è il valore medio della variazione della quantità di moto
per unità di tempo, variazione dovuta a tutti gli urti molecolari sull'unità di area.
TEMPERATURA = Energia cinetica media di traslazione
Uno stato termodinamico di un sistema è detto di equilibrio quando le
variabili termodinamiche che lo descrivono sono costanti nel tempo.
L'equilibrio termodinamico è il risultato di tre diversi tipi di equilibrio:
1) equilibrio meccanico (equilibrio di forze e momenti);
2) equilibrio chimico (non avvengono reazioni chimiche);
3) equilibrio termico ( la temperatura è la stessa ovunque).
In uno stato di equilibrio esiste, in generale, una precisa relazione tra le
coordinate termodinamiche che si esprime sotto forma di equazione di stato.
Il sistema termodinamico più semplice
Gas
a
densità
sufficientemente
basse
tutti
indipendentemente dalla loro composizione
mostrano una relazione semplice fra p, V e T
pV = nRT
i
gas,
chimica,
EQUILIBRIO TERMICO. IL PRINCIPIO "ZERO" DELLA TERMODINAMICA
se A e B sono in equilibrio termico con un terzo corpo C (che
costituisce il termometro), allora lo sono anche fra loro.
la temperatura di un sistema è una grandezza che, trascorso un tempo
sufficiente, raggiunge il valore di quella dei sistemi con cui è a contatto.
L’idea contenuta nel Principio Zero, per quanto semplice, non è ovvia.
Due persone possono conoscere entrambe una terza persona, ma non
conoscersi a vicenda.
Due pezzi di ferro attraggono una calamita, ma non si attraggono l’un
l’altro.
Un sistema termodinamico, per effetto dell'interazione con
l'ambiente esterno può passare da uno stato di equilibrio a un altro
stato di equilibrio.
trasformazione termodinamica :
evoluzione da uno stato di
equilibrio a un altro.
Gli stati intermedi attraverso cui il
sistema passa durante l'evoluzione
possono essere di equilibrio o di non
equilibrio.
Per effettuare una trasformazione che passi attraverso stati di equilibrio bisogna
procedere con variazioni molto piccole delle coordinate termodinamiche in modo che
queste siano definite istante per istante.
In pratica ci si discosta poco da uno stato di equilibrio per permettere che la
trasformazione avvenga.
Si attende il ristabilirsi dell'equilibrio nelle nuove condizioni prima di procedere ad una
ulteriore variazione infinitesima dello stato. Ne consegue che la trasformazione deve
svolgersi lentamente. Questo tipo di trasformazione è detta trasformazione quasi
statica.
Una trasformazione è detta reversibile se essa avviene attraverso stati di equilibrioe
in assenza di forze dissipative.
Una trasformazione è detta reversibile se essa avviene
attraverso stati di equilibrio e in assenza di forze dissipative.
Una trasformazione non reversibile è detta irreversibile; cioè la
trasformazione passa attraverso stati di non equilibrio o avviene in
presenza di forze dissipative (oppure si verificano entrambe le
condizioni).
Una trasformazione reversibile può essere arrestata in un qualunque
stato intermedio e, variando di poco le condizioni esterne, si può
invertire il verso della trasformazione, ripercorrendo gli stessi stati
già attraversati.
ISOBARA
ISOCORA
Trasformazione isoterma
Trasformazione adiabatica
Q=0
LAVORO IN UNA TRASFORMAZIONE REVERSIBILE
Facciamo fare ad un gas una trasformazione
reversibile infinitesima che determini un
innalzamento dh del pistone mobile.
il lavoro fatto dal gas nell’espansione:
dW = Fds = pAdh= pdV
Per una trasformazione finita:
B
W = ∫ dW = ∫ pdV
A
In generale p varia durante la trasformazione; nel piano pV di Clapeyron si
ottiene una curva continua p=p(V) ;
pA
pB
VA
VB
l’area sotto la curva è proprio W
CALORE
Due corpi a diversa temperatura posti in contatto termico raggiungeranno,
dopo un certo tempo, una temperatura intermedia.
flusso di calore
Il calore è energia che fluisce da un corpo ad un altro per
effetto della differenza di temperatura esistente fra di essi.
EQUIVALENTE MECCANICO DEL CALORE
Se il calore è energia che fluisce una qualunque unità di energia può
essere considerata unità di calore.
Fu Joule il primo a misurare
accuratamente l’equivalente
meccanico del calore, cioè quanti
Joule equivalgono ad una caloria.
La relazione esistente fra calorie
e Joule può essere ricavata
mediante un esperimento in cui
una certa quantità misurata di
energia meccanica viene
convertita COMPLETAMENTE in
una quantità misurata di calore.
1 caloria = 4.186 Joule
1 Joule = 0.239 calorie
4 diversi esperimenti:
P = IV =
L1 = 2mgh → ΔT → Q = mcΔT
V2
→ ΔT → mcΔT = Q
R
L2 = Pd ⋅ tempo
.
L4
L3
Lavoro
meccanico
sul
pistone
.
mantenuto in un cilindro a pareti
conduttrici
Vengono strofinati fra loro blocchi di metallo immersi in
acqua. Lavoro viene speso contro la forza di attrito
Convenzioni sui segni di calore e lavoro
ereditate dagli studi sulle macchine termiche
Q
Q
Q
Il lavoro compiuto da un
sistema termodinamico nel
passare da uno stato iniziale A
ad uno stato finale B dipende
dalla trasformazione eseguita
Anche il calore scambiato da un
sistema nel passare da A a B
dipende dalla trasformazione
Primo Principio della Termodinamica
ΔU = Q − W
Primo Principio = conservazione dell’energia
Esiste una ‘funzione di stato’, chiamata energia interna U, la cui variazione dà
gli scambi energetici del sistema con l’ambiente.
Se si fornisce energia ad un sistema, sia tramite lavoro meccanico che con
uno scambio di calore, questa energia resta immagazzinata nel sistema
sotto forma di energia interna, che può essere successivamente
riutilizzata.
Secondo il Primo Principio non ci sono limiti concettuali per i processi termodinamici
effettuabili da un sistema purché sia valida la relazione:
ΔU = Q − W
Vedremo però che esiste un limite per la riutilizzazione dell’energia termica.
Espansione libera di un gas perfetto
ΔU = Q − W
Q=0
ΔU = 0
T f = Ti
Trasformazione irreversibile
W =0
ΔT = 0
Macchina termica
W
ρ=
QA
Macchina frigorifera
Q0
η=
W
La più semplice macchina termica: Ciclo di Carnot
W QA + QC
Q1
ρ=
=
= 1+
QA
QA
Q2
E' possibile dimostrare che
Q1
T1
=−
Q2
T2
Q1
T1
ρ = 1+
= 1−
Q2
T2
Il rendimento della macchina di Carnot dipende solo dalle
temperature T1 e T2 dei due termostati con cui essa lavora
Q1 Q2
+
=0
T1 T2
Q1
T1
=−
Q2
T2
2
Qi
=0
∑
i =1 Ti
Nel ciclo di Carnot, la somma algebrica dei calori scambiati
diviso la temperatura a cui avviene lo scambio è nulla.
Ciclo di Carnot funzionante al contrario
Teorema di Carnot.
Tutte le macchine reversibili che lavorano tra due sorgenti a
temperature T1 e T2 hanno lo stesso rendimento. Nessuna macchina
che lavori fra le stesse sorgenti può avere rendimento maggiore. Il
risultato è indipendente dalla sostanza che compie il ciclo.
Q1
T1
ρ = 1+
= 1−
Q2
T2
2
Qi
Q1 Q2
+
=∑ =0
T1 T2 i =1 Ti
SECONDO PRINCIPIO DELLA TERMODINAMICA
Il primo principio della termodinamica stabilisce che ai fini
dell'aumento dell'energia interna calore e lavoro sono equivalenti
ΔU = Q - W
Tuttavia la situazione sperimentale non appare simmetrica: mentre è sempre
possibile trasformare integralmente lavoro in calore, per esempio sfruttando l'attrito,
la trasformazione contraria di calore in lavoro sembra essere limitata.
La asimmetria nei ruoli svolti da calore e lavoro non risulta evidente dal Primo Principio
1° impossibilità sperimentale (per le macchine termiche)
non si verifica mai che QC = 0
W < QA
Non esistono esempi contrari: in un processo ciclico vi è una impossibilità di
trasformazione integrale di calore in lavoro ovvero la trasformazione di calore in
lavoro è sempre accompagnata da cessione di calore.
2° impossibilità sperimentale
Il calore non passa mai spontaneamente da un corpo freddo a un
corpo caldo.
E' possibile fare avvenire questo passaggio, ma deve essere eseguito lavoro
(macchina frigorifera)
Il Secondo Principio della Termodinamica consiste nel
prendere atto di queste impossibilità sperimentali, che non presentano eccezioni
conosciute, e nel trasformarle in postulati, secondo i seguenti enunciati:
Enunciato di Kelvin-Planck: "è impossibile realizzare un processo il
cui unico risultato sia la trasformazione in lavoro del calore fornito
da una sorgente a temperatura uniforme".
"Non esiste una macchina termica perfetta"
Enunciato di Clausius: "è impossibile realizzare un processo il cui
unico risultato sia il trasferimento di una quantità di calore da un
corpo ad un altro a temperatura maggiore".
"Non esiste il frigorifero perfetto".
E' possibile dimostrare che i due enunciati sono logicamente equivalenti, nel
senso che la negazione di uno implica la negazione dell'altro.
Se il processo non è ciclico è possibile ottenere una trasformazione
integrale di calore in lavoro, però essa non è l'unico risultato finale del processo
considerato, in quanto si verifica sempre una variazione dello stato termodinamico del
sistema.
Per esempio, in una espansione isoterma di un gas ideale, ΔU = 0 perché T è costante e
quindi W = Q, però lo stato finale del gas differisce da quello iniziale dato che il volume è
aumentato e la pressione diminuita. Se volessimo riportare il gas nello stato iniziale, con una
generica trasformazione, per costruire un ciclo termico, dovremmo assorbire lavoro e cedere
calore, ricadendo nel caso precedente.
Elettricità
L’interazione elettromagnetica tiene insieme elettroni e nuclei per formare gli atomi, tiene
insieme gli atomi per formare le molecole, tiene insieme le molecole per formare gli oggetti
macroscopici.
Il termine “elettromagnetico” viene dalla fusione della parola “elettrico” con la parola “magnetico”.
Ciò esprime il fatto che sia i fenomeni elettrici che quelli magnetici dipendono dalla medesima
proprietà della materia, proprietà che chiamiamo carica elettrica. Benché i fenomeni elettrici e
quelli magnetici siano intimamente connessi, non lo sono tuttavia inseparabilmente.
Se ci si limita a studiare le cariche in equilibrio statico (cioè l’elettrostatica) si possono trovare
separati l’elettricità ed il magnetismo.
CARICA E MATERIA (caricamento per “strofinio”)
forza repulsiva
Le bacchette vengono dette “elettricamente cariche” o che posseggono una “carica elettrica”.
Risulta chiaro che le due bacchette devono possedere carica dello stesso tipo in quanto fatte dallo
stesso materiale e strofinate allo stesso modo.
forza repulsiva
(risultati simili)
forza attrattiva
CONCLUSIONI
1) Si conclude che vi sono due tipi di carica: le bacchette tipo quella di vetro hanno un tipo di
carica (+), le bacchette tipo quella di plastica hanno il tipo opposto di carica (-).
2) Corpi che hanno cariche dello stesso segno si respingono.
3) Corpi che hanno cariche di segno opposto si attraggono.
MODELLO
Il modello che spiega i fenomeni elettrici descritti è il seguente. La materia contiene due tipi
di carica elettrica, la carica detta positiva e quella detta negativa. Nei corpi scarichi sono presenti
uguali quantità di ciascun tipo di carica. Quando i corpi vengono caricati per strofinio, la carica
elettrica si trasferisce dall’uno all’altro.
Intrinseca al modello è la legge di conservazione della carica: la carica elettrica non può
essere né creata né distrutta; può soltanto essere trasferita. La carica è associata alla materia.
Atomi
protoni
neutroni
positiva
nulla
elettroni
negativa
mp = 1.67 * 10-27 Kg
mn mp
1
me ≈
m p 9.11×10-31 Kg
2000
Z = numero atomico;
A = numero protoni + neutroni = numero di massa.
Nucleo fatto da protoni + neutroni, dimensioni 5 ⋅10−15 m, nube elettronica
2 ⋅10−8 m ≡ 2 ⋅10−10 m.
LA CARICA È QUANTIZZATA, cioè la grandezza varia a salti, cioè per quantità discrete.
CONDUTTORI E ISOLANTI
La maggior parte dei materiali può essere classificata in tre categorie: conduttori, isolanti,
semiconduttori.
Conduttore: un conduttore è un materiale attraverso il quale la carica può fluire facilmente.
Un materiale conduttore come un metallo è un reticolo di ioni positivi fissi intramezzato da elettroni
“liberi” in grado di muoversi attraverso il materiale.
Isolante: un isolante è un materiale che non consente alla carica di fluire liberamente. In un
isolante gli elettroni sono trattenuti dai propri atomi o molecole e non possono passare da un sito
molecolare a quello contiguo.
Semiconduttore: (Silicio, Germanio, Arseniuro di Gallio, Diamante) ha proprietà intermedie;
a basse T si comporta come un isolante; ad alte T oppure in presenza di “doping” si comporta quasi
come un conduttore ma con un numero di portatori di carica notevolmente inferiore al conduttore.
In un conduttore i portatori di carica sono elettroni. In un fluido conduttore, come l’acqua salata,
non vi sono praticamente elettroni liberi; i portatori di carica sono ioni positivi e negativi.
Per illustrare il comportamento elettrico contrapposto dei conduttori e degli isolanti eseguiamo un
esperimento, che è il processo di “carica per induzione”.
dopo che la bacchetta carica è stata allontanata, un eccesso di carica positiva rimane localizzata
nella sfera.
LEGGE DI COULOMB (1736-1806)
F∝
q1q2
r2
(1784)
Bilancia di torsione: la repulsione fra le sferette a e b fa torcere il filo. Da una misura dell’angolo θ
si ricava il valore numerico dell’intensità della forza.
La forza su ciascuna carica dovuta all’altra agisce lungo la linea che connette le due cariche.
qq
F = k 1 22 .
r
Essa vale per cariche puntiformi (dimensioni cariche << distanza fra le cariche).
LA LEGGE DI COULOMB PUÒ ESSERE UTILIZZATA PER DEFINIRE L’UNITÁ DI
CARICA. Si potrebbe definire, come carica unitaria, quella carica che posta alla distanza unitaria da
una carica uguale determina una forza unitaria (in questo modo k = 1).
Questa è proprio quello che si fa nel sistema CGS; la carica in questo caso si misura in unità
elettrostatiche (ues). Per motivi pratici l’unità di carica nel SI è derivata dall’unità di corrente
elettrica.
L’unità di carica nel sistema internazionale è il Coulomb (C) che è definito come la quantità di
carica che fluisce in un secondo quando si ha una corrente stazionaria di 1 ampere.
q=it
Coulomb ampere secondi
Il metodo operativo per definire l’unità di corrente, detta ampere (A) nel sistema
internazionale è basato sulla constatazione sperimentale che fili percorsi da corrente si attraggono.
La forza fra fili paralleli indefiniti è usata per definire l’ampere. Dati due fili indefiniti, di sezione
circolare trascurabile, distanti 1 m e nel vuoto, l’ampere è definito come quella corrente che
scorrendo in ciascun filo provoca una forza di 2 ⋅10−7 Newton per metro di lunghezza.
Se mettiamo quindi una carica di 1 C alla distanza di 1 m da una carica uguale di 1 C misuriamo
2
qq
sperimentalmente una forza F = 8.99 ⋅109 N ; F = k 1 2 2 , quindi k = 8.99 ⋅109 N ⋅ m 2 .
C
r
La costante k deve essere “dimensionata” in modo tale che il 2° membro dia come risultato
“Newton”. Per ragioni di praticità si suole esprimere la costante k in questo modo:
1
k=
4πε 0
con ε 0 =
1
4π k
=
1
N ⋅ m2
4 ⋅ π ⋅ 8.99 ⋅10
C2
≅ 8.9 ⋅10
−12
9
C2
N ⋅ m2
ε 0 = costante dielettrica del vuoto (permettività del vuoto).
Il Coulomb è una quantità di carica estremamente grande. La carica di un elettrone è
e ≅ 1.6 ⋅10−19 C . Quindi ci vogliono 1/e 6.25 ⋅1018 elettroni per fare 1 Coulomb di carica.
Se sono presenti più di due cariche l’equazione F =
1 q1q2
è valida per ogni coppia di cariche.
4πε r 2
q1
q2
ur
F 2,3
q3
ur
F 1,3
ur ur
ur
F 3 = F 1,3 + F 2,3 la forza è semplicemente la somma vettoriale.
Confronto con la gravitazione
F =G
m1m2
r2
dove G = 6.67 ⋅10−11
N ⋅ m2
kg 2
costante di gravitazione universale.
6.67 ⋅10−11 ⋅ 5.98 ⋅1024
⎛ m ⎞
F = ⎜ G 21 ⎟ m2 =
m2 = 9.8m = mg
2
6
⎝ r ⎠
⋅
6.37
10
(
)
Gm1
= g = 9.8m / sec 2 .
2
r
Voglio confrontare le intensità della forza elettrica e della forza gravitazionale agenti tra un protone
(carica = e = 1.6 ⋅ 10-19 C, massa pari a mp = 1.67 ⋅ 10-27 kg) ed un elettrone (carica = - e, massa
me = 9.11 ⋅ 10-31 kg).
m1 = mTerra = 5.98 ⋅1024 , r = RTerra = 6.37 ⋅106 m
FE =
q1q2
1 e2
=
4πε 0 r 2
4πε 0 r 2
FG = G
1
m p me
r2
(
)
2
8.99 ⋅109 1.6 ⋅10−19
e2
=
2.26 ⋅10−39
−11
−27
−31
m
m
6.67 ⋅10 ⋅1.67 ⋅10 ⋅ 9.11⋅10
r 2 G p2 e
r
La forza gravitazionale è trascurabile rispetto alla forza elettrica.
FE
1
=
FG 4πε 0
CAMPO ELETTRICO
Un campo è una grandezza fisica che può essere associata alla posizione. Abbiamo visto in
r
Fisica 1 il campo scalare della temperatura T(x,y,z) e il campo vettoriale della velocità v (x,y,z) nel
caso di un fluido.
ur
Per definire il campo elettrico E in modo operativo poniamo una piccola carica di prova q0 (che
supponiamo positiva per convenienza) nel punto che si deve esaminare e misuriamo la forza
ur
ur
elettrica F che agisce sulla carica di prova. Il vettore campo elettrico E è definito come
ur
ur F
E=
q0
-
Intensità
⎧direzione
→ quelli della forza che agisce su una particella carica positivamente.
⎨
⎩verso
ur
La forza F agente sulla carica di prova q0 è dovuta alla presenza di altre cariche q1, q2, ... qi ... qn.
ur
⎛
1 qi q0 ⎞
La forza che la i-esima carica esercita su q0 è proporzionale a q0 stessa ⎜ Fi =
,
quindi
F
⎟
4πε 0 ri 2 ⎠
⎝
z
è proporzionale a q0.
q0
.+
.- .+
..+ .+
.- .+
y
x
ur
F
Quindi il rapporto
è indipendente da q0. Ciò significa che il valore del campo che si misura
q0
usando una particella di prova è indipendente dalla carica della particella di prova stessa.
ATTENZIONE: per misurare il campo elettrico in un punto dello spazio si deve usare una carica di
prova la più piccola possibile ( q0 → 0 ) . Se q0 non è piccola, la sua presenza può alterare la
distribuzione di cariche e modificare quindi il campo elettrico prodotto dalle cariche nel punto in
cui è posta q0.
Il campo elettrico si può considerare come una modificazione che si crea nello spazio per la
presenza della distribuzione di carica. Questo campo esiste indipendentemente dal fatto che vi sia
una carica di prova per misurarlo, proprio come la temperatura esiste in ogni punto dell’aula
indipendentemente dalla presenza di un termometro per misurarla.
Ai tempi di Faraday (1791-1867) la forza agente fra particelle cariche era concepita come “azione a
distanza” cioè come interazione diretta e istantanea fra le due particelle.
r
q1
q2
Secondo questa descrizione se q1, inizialmente ferma, cambia la sua posizione cioè accelera, q2 ne
risente istantaneamente subendo una forza diversa in quanto r è cambiato.
Questo non è però in accordo con l’esperienza. Oggi preferiamo una descrizione dell’interazione fra
due particelle in termini di campo elettrico:
1) La carica q1 dà origine a un campo elettrico nello spazio che la circonda.
ur
2) Il campo agisce sulla carica q2 esercitando una forza F .
Il campo gioca un ruolo intermedio nelle forze che si esercitano tra cariche elettriche. Abbiamo
quindi una rappresentazione in termini di:
carica
campo
carica
e non in termini di carica
carica
come nell’azione a distanza. Secondo la teoria
elettromagnetica che svilupperemo in questo corso quando q1 si sposta si crea una perturbazione del
campo che ha origine da q1, questa perturbazione si propaga con la velocità della luce e arriva a q2
l
dopo un tempo t = .
c
LINEE DI FORZA
Le linee di forza sono un modo conveniente per visualizzare l’andamento del campo elettrico. La relazione
fra queste linee immaginarie e il vettore campo elettrico è:
ur
La tangente a una linea di forza, in ogni punto, dà la direzione di E in quel punto;
Le linee di forza sono tracciate in modo tale che il numero di linee che attraversano una
ur
superficie di area unitaria (normale alle linee stesse) è proporzionale all’intensità di E . Dove le
ur
ur
linee si addensano E è grande, dove si diradano E è piccolo.
(1)
(2)
+
+
+
‐
+
‐
Dipolo elettrico.
È possibile tracciare un insieme continuo di linee che soddisfano questi requisiti in quanto vale la legge di
(
)
Coulomb (esponente di r è 2, 1/r2), che come conseguenza ha il teorema di Gauss Φ ( E ) = q ε 0 .
Energia potenziale elettrica e potenziale elettrico.
Caso 1: campo E uniforme
Si definisce energia potenziale elettrica di una carica q in un punto A di un campo elettrico il lavoro che le
forze del campo compiono sulla carica quando la carica q si sposta dal punto A ad un punto qualunque di un
certo livello di riferimento:
L=F·s = qE z
dove z è la distanza del punto A dal livello di
riferimento tratteggiato
A + q E F=qE + q
z Livello di riferimento zB B
A
E zA
UA=qEzA UB=qEzB Livello di riferimento Se la carica si sposta da un punto A ad un punto B posto
sulla stessa linea di campo passante per A il lavoro fatto dalle forze del campo è uguale alla differenza
dell’energia potenziale UA - UB:
L=F·s = qE (zA- zB) = qE zA - qEzB = UA - UB
Se la carica fa un cammino rettilineo ma non lungo una linea di campo il risultato è lo stesso, cioè il lavoro
fatto dalle forze del campo è sempre uguale alla differenza dell’energia potenziale UA - UB:
B
α A + q E C
F=qE zB
Livello di riferimento zA
Infatti :
L=F·AB cos α = F AC = qE (zA- zB) = qE zA - qEzB = UA - UB
Se infine il percorso non è rettilineo ma è una curva qualsiasi, possiamo dividere la curva in tanti piccoli
segmenti rettilinei. Il lavoro fatto dalle forze del campo lungo ciascun segmento è pari alla variazione di
energia potenziale fra i punti estremi di questi segmenti. Sommando le variazioni su tutti i piccoli segmenti
rettilinei in cui abbiamo diviso il percorso curvilineo generico, alla fine rimarranno solamente UA - UB .
Caso 2: campo generato da una carica puntiforme.
Vogliamo calcolare l’energia potenziale in un punto nel caso in cui il campo sia generato da una carica
puntiforme.
Partiamo dal calcolare il lavoro fatto dalle forze del campo quando la carica q si sposta da un punto A ad un
punto B lungo una linea di campo. A differenza dal caso precedente, adesso la forza agente sulla carica q non
è costante, ma varia con la distanza dalla carica Q.
+Q A q EA
B +q q EB +q Indichiamo con rA ed rB le distanza di A e B dalla carica Q che genera il campo. La forza agente su q è la
forza di Coulomb:
F = kQq / r2
Il lavoro fatto dalle forze del campo quando q si sposta da A a B non può essere calcolato semplicemente
come prodotto di forza per spostamento, in quanto lungo il percorso da A a B la forza non è costante.
Suddividiamo allora il tratto AB in tanti piccoli intervalli Δsi in cui la forza Fi può essere considerata
pressoché costante. Calcoliamo il lavoro fatto dalle forze del campo lungo ciascuno di questi intervallini e
poi sommiamo su tutti gli intervallini per ottenere il lavoro totale lungo l’intero percorso da A a B.
+Q rA A L A1 = F1Δs1 = k
r1 1 r2 2 rn n rB B ⎛ 1 1⎞
Qq
Qq
( r1 − rA ) = k
( r1 − rA ) = kQq⎜⎜ − ⎟⎟
2
r
r1rA
⎝ rA r1 ⎠
dove nel tratto A→1 distanza r è stata sostituita con la media geometrica r =
rA r1 delle distanze degli
estremi A ed 1.
Analogamente per i tratti successivi 1→2, 2→3, n→B:
L12 = F2 Δs2 = k
⎛1 1⎞
Qq
Qq
( r2 − r1 ) = k
( r2 − r1 ) = kQq ⎜⎜ − ⎟⎟
2
r
r2 r1
⎝ r1 r2 ⎠
⎛1 1⎞
L23 = F3 Δs3 = kQq ⎜⎜ − ⎟⎟
⎝ r2 r3 ⎠
⎛1 1⎞
LnB = kQq⎜⎜ − ⎟⎟
⎝ rB rn ⎠
Il lavoro totale per andare da A a B è la somma di tutti i lavori calcolati sopra:
⎛1 1⎞
⎛1 1⎞
⎛ 1 1⎞
⎛1 1⎞
L AB = L A1 + L12 + L23 + ......LnB = kQq ⎜⎜ − ⎟⎟ + kQq ⎜⎜ − ⎟⎟ + kQq ⎜⎜ − ⎟⎟ + ......kQq ⎜⎜ − ⎟⎟
⎝ rA r1 ⎠
⎝ r1 r2 ⎠
⎝ r2 r3 ⎠
⎝ rB rn ⎠
Alla fine rimangono solo i termini con 1/rA e 1/rB. Il lavoro sarà quindi:
⎛1 1⎞
L AB = kQq⎜⎜ − ⎟⎟
⎝ rA rB ⎠
Se il punto B fosse a grandissima distanza da A (rB→∞) allora 1/rB→0 e quindi l’espressione del lavoro
dipenderebbe soltanto dalla posizione rA
LA∞ = k
Qq
rA
Si definisce energia potenziale elettrica della carica q nel generico punto P a distanza r dalla carica Q che
genera il campo come il lavoro fatto dalle forze del campo quando la carica q si sposta dal punto P
all’infinito:
U = LP∞ = k
Qq
1 Qq
=
r
4πε o r
Si noti che la forza di Coulomb varia come l’inverso del quadrato della distanza fra le due cariche, mentre
l’energia potenziale varia come l’inverso della distanza.
Potenziale elettrico.
L’energia potenziale elettrica di una carica q nel campo generato da una carica Q dipende dalla carica Q,
dalla distanza r ma anche dal valore della carica q. Se desideriamo descrivere il campo generato da Q in un
generico punto P tramite una quantità scalare che non dipenda dal valore della carica q posta in P,
introduciamo una grandezza chiamata potenziale elettrico V, definita come il rapporto fra l’energia
potenziale elettrica della carica q (posta in P) e la carica q stessa.
V=
U
=
q
k
Qq
r =kQ = 1 Q
q
r 4πε 0 r
Il potenziale elettrico si misura in Joule/Coulomb; tale rapporto è chiamato Volt.
Nel caso di un campo elettrico uniforme, il potenziale in un punto P distante z da un livello di riferimento è
semplicemente:
V=
U qEz
=
= Ez
q
q
Da questa relazione si capisce che il potenziale del livello di riferimento (z=0) è stato scelto uguale a zero.
Elettronvolt (eV)
Un elettronvolt è l’energia acquistata da un elettrone nel passare attraverso la differenza di potenziale di 1V :
ΔU = q ΔV =1.6 ·10-19 C ·1 V = 1.6 ·10-19 J
Relazione fra campo elettrico e differenza di potenziale fra due punti.
Consideriamo un campo uniforme e due punti A e B distanti zA e zB da un livello di riferimento:
zB
B
A E zA
VA=EzA VB=EzB Livello di riferimento Osserviamo che le linee del campo elettrico sono dirette verso destra, mentre il potenziale V aumenta
andando verso sinistra rispetto al livello di riferimento, cioè il potenziale elettrico aumenta andando in verso
opposto al campo (oppure diminuisce muovendosi nel verso del campo).
Il modulo del campo elettrico può calcolarsi conoscendo il potenziale dei punti A e B e la loro distanza l = zA
- zB :
VA – VB = E zA – E zB = E (zA - zB) = E l
E=
V A − V B ΔV
=
l
l
Da questa relazione si deduce immediatamente un’altra unità di misura del campo elettrico:
E=
Volt
metro
Ovviamente questa unità è del tutto equivalente al Newton/Coulomb (N/C) che deriva dalla definizione stessa
di campo
E=
F F ⋅s
lavoro
Joule
Volt
=
=
=
=
q q ⋅ s carica ⋅ spostamento Coulomb ⋅ metro metro
Questa unità è quella più usata nella pratica perché per creare un campo elettrico in una certa regione di
spazio si usano sorgenti di differenza di potenziale (batterie o alimentatori) che vengono connesse per
esempio a condensatori piani le cui armature sono poste a una certa distanza fra loro.
Questa relazione può essere generalizzata per tenere conto anche dei segni :
E=−
dV
ΔV
o, per variazioni infinitesime, E = −
dz
Δz
Questa relazione è molto importante perché ci permette di passare da una grandezza scalare come il
potenziale a una grandezza vettoriale come il campo elettrico.
L’importanza pratica del potenziale sta nel fatto che il potenziale è una grandezza scalare. Il potenziale
creato da una distribuzione di cariche si ottiene semplicemente sommando algebricamente i potenziali dovuti
alle singole cariche. Tramite la relazione di sopra possiamo ricavare il campo elettrico di una distribuzione di
cariche, che altrimenti avremmo dovuto ricavare sommando vettorialmente (e non algebricamente) i campi
generati da ogni singola carica.
Superfici equipotenziali.
Lo spazio che circonda una certa configurazione di cariche è sede di un campo elettrico. Ad ogni punto dello
spazio che circonda le cariche possiamo assegnare un valore del potenziale, conoscendo il quale possiamo
ricavare “facilmente” il campo elettrico stesso.
Si definisce superficie equipotenziale una superficie i cui punti sono tutti al medesimo potenziale.
E α B A
Superficie equipotenziale
Presi due punti A e B sulla superficie equipotenziale, il potenziale in A deve essere uguale, per definizione, al
potenziale in B, cioè VA=VB. Il lavoro fatto dalle forze del campo quando una carica si sposta lungo una linea
AB appartenente alla superficie equipotenziale è LAB= q·ΔVAB=0 in quanto ·ΔVAB=0 . Ma il lavoro è il
prodotto scalare fra forza e spostamento:
L = F ·s= F s cosα =0
Ma F ed s sono in generale entrambi diversi da zero quindi, affinché il prodotto scalare sia nullo, deve essere
cosα = 0, cioè α = π/2 . Quindi il campo elettrico è sempre perpendicolare alla superficie
equipotenziale.
Circuitazione del vettore campo elettrico.
Supponiamo di avere una carica q posta in un campo elettrico E, e facciamo compiere alla carica un percorso
chiuso che parta dal punto A e termini nuovamente in A. Per definizione di energia potenziale U, il lavoro
LAB fatto dalle forze del campo quando la carica si sposta dal punto A ad un generico punto B è pari alla
variazione di energia potenziale UA - UB . Il lavoro fatto dalle forze del campo in un percorso chiuso è quindi:
LAA = UA-UA = 0
D’altra parte possiamo dividere il percorso chiuso AA in tanti piccoli intervalli Δsi in cui agisce la forza
elettrica Fi=qEi che forma un angolo αi con lo spostamento Δsi . Il lavoro LAA è semplicemente la somma dei
lavori elementari fatti dalle forze del campo negli spostamenti elementari Δsi :
n
n
n
n
i =1
i =1
i =1
i =1
LAA = ∑ Fi ⋅ Δ s i = ∑ Fi Δsi cos α i = ∑ qEi Δsi cos α i = q ∑ Ei Δsi cos α i = 0
n
Quindi la quantità
∑ E Δs cos α
i
i
i
= 0 , chiamata circuitazione del vettore E, deve essere nulla.
i =1
Il fatto che il lavoro fatto in un percorso chiuso sia nullo significa che non si dovrà spendere nel complesso
alcuna energia per eseguire questo spostamento. L’energia che abbiamo speso in alcuni tratti per fare un
lavoro contro le forze del campo ci verrà restituita in altri tratti del percorso in cui il lavoro fatto dalle forze
del campo è positivo. L’energia del sistema si conserva durante questo spostamento. Per questo motivo si
dice che il campo elettrico è conservativo.
Analogia fra campo elettrico e campo gravitazionale.
Il campo elettrico è definito come
E=
F
⎛N⎞
in ⎜ ⎟
q
⎝C⎠
se consideriamo il caso di due cariche puntiformi F = k
Qq
quindi
r2
E=k
Q
r2
Il campo gravitazionale è definito come
H=
⎛ N ⎞ ⎛ kg ⋅ m s 2 ⎞ ⎛ m ⎞
F
⎟⎟ = ⎜ 2 ⎟
in ⎜⎜ ⎟⎟ = ⎜⎜
m
kg
kg
⎝ ⎠ ⎝
⎠ ⎝s ⎠
Se consideriamo il caso di due masse puntiformi F = G
Mm
r2
quindi H = G
M
r2
Il campo gravitazionale ha come unità m/s2 , infatti essendo la forza di gravità diviso la massa della
particella rappresenta l’accelerazione di gravità.
Le espressioni matematiche della forza di Coulomb e della forza gravitazionale sono identiche; l’unica
differenza sta nel fatto che le forze gravitazionali sono solo attrattive, mentre quelle elettrostatiche possono
essere sia attrattive che repulsive.
Campo gravitazionale uniforme.
Il valore del campo gravitazionale in prossimità della superficie terrestre è H=g= 9.8 m/s2.
L’energia potenziale U di una massa m posta ad un’altezza z rispetto a un livello di riferimento (p.e. il
suolo) è U = mgz.
Il lavoro compiuto dalle forze del campo quando la particella si sposta da un punto A a quota zA ad un punto
B a quota zB è pari alla differenza di energia potenziale:
LAB= UA-UB= mg(zA - zB)
Il potenziale gravitazionale di un punto a quota z rispetto a un livello di riferimento è V= U/m= gz.
Campo gravitazionale radiale.
L’energia potenziale U di una massa m posta a una distanza r dalla massa M che genera il campo è
U = −G
Mm
. Il segno – rispecchia il fatto che la forza gravitazionale fra due masse è attrattiva, diretta
r
radialmente verso la massa M che genera il campo. Quindi il lavoro fatto dalle forze del campo per spostare
la massa di prova da r fino ad infinito è negativo, in quanto la forza è diretta in verso opposto allo
spostamento (questa situazione è esattamente identica al caso elettrico del campo generato da una carica Q
negativa).
Il potenziale gravitazionale vale V = −G
M
r
Traiettorie di una carica in campo elettrico e gravitazionale.
Una particella di massa m in moto in un campo gravitazionale uniforme descrive una traiettoria parabolica
(moto del proiettile). L’equazione della traiettoria si ottiene eliminando il tempo fra l’equazione del moto
rettilineo uniforme lungo x e quella del moto rettilineo uniformemente accelerato lungo y.
Una carica q in moto in una regione sede di un campo elettrico uniforme E descrive un analogo moto
parabolico.
y v0 v0,y E α v0,x y0 x La forza agente sulla carica q è F=qE, quindi la sua accelerazione è a = F/m = qE/m.
Le componenti orizzontale e verticale della velocità iniziale v0 sono v0,x = v0 cosα e v0,y = v0 sinα.
Le equazioni del moto sono quindi
t =
x = v 0 cos α t
y = y0 + v 0 sin α t −
x
v 0 cos α
1 qE 2
t
2 m
⎞
x
x
1 qE ⎛
⎜⎜
⎟
y = y0 + v 0 sin α
−
v 0 cos α 2 m ⎝ v 0 cos α ⎟⎠
y = y0 + x tgα −
che rappresenta una parabola.
2
x2
1 qE
2 m v 20 cos 2 α
Conduttore
Un conduttore è un materiale nel quale la carica elettrica è libera di muoversi sotto l’azione di un campo
elettrico (o delle forze coulombiane generate dalle cariche stesse). Sono conduttori i materiali metallici come
rame, alluminio, argento.
Nei conduttori gli elettroni più esterni degli atomi sono legati molto debolmente all’atomo; di conseguenza
questi elettroni possono muoversi liberamente all’interno del materiale come se fossero le particelle di un
gas. Questi elettroni sono chiamati elettroni di conduzione e costituiscono il cosiddetto gas di elettroni. Il
movimento degli elettroni all’interno di un conduttore è un moto disordinato a causa degli urti con il
reticolo cristallino che determinano improvvisi cambiamenti della direzione della velocità dell’elettrone.
Un isolante è invece un materiale in cui gli elettroni atomici sono molto fortemente legati ai rispettivi nuclei.
A differenza dei conduttori, negli isolanti gli elettroni non possono muoversi da un punto ad un altro del
materiale.
In un conduttore gli elettroni di conduzione possono muoversi liberamente entro il metallo, ma non sono in
grado di sfuggire attraverso la superficie (a meno che non possiedano un’elevata energia) a causa delle forze
elettrostatiche che si generano in prossimità degli strati di confine del reticolo cristallino del metallo.
L’esistenza della barriera di energia alla superficie è facilmente comprensibile. Quando un elettrone cerca di sfuggire
dal metallo, si ha la formazione di una carica positiva netta sulla superficie, dato che il metallo era originariamente
neutro. Si manifesterà quindi una forza d’attrazione tra la carica positiva “rimasta scoperta” e l’elettrone che tende ad
allontanarsi. L’elettrone, a meno che non possieda energia sufficiente per uscire dalla regione d’influenza della carica
positiva “rimasta scoperta”, sarà costretto a ritornare dentro il metallo. Risulta dunque evidente l’esistenza di una
barriera di energia potenziale in corrispondenza alla superficie.
Effetto termoelettronico (o termoionico). L’effetto termoelettronico è l’emissione di elettroni da un metallo
causato da un riscaldamento del metallo stesso. All’aumentare della temperatura del metallo l’elettrone
acquista un’energia cinetica (∼kT) sufficientemente alta da riuscire a superare la barriera di energia
potenziale presente alla superficie del metallo.
Corrente elettrica.
L’applicazione di un campo elettrico a un materiale conduttore determina un moto ordinato degli elettroni
di conduzione nella direzione del campo elettrico applicato, cioè una corrente elettrica.
La velocità degli elettroni all’interno del conduttore è mediamente costante, risultato di una velocità che
cresce linearmente nel tempo (moto uniformemente accelerato) per effetto della forza costante esercitata
sugli elettroni dal campo elettrico esterno (F=qE) e degli urti con gli ioni del reticolo che modificano tale
velocità.
La velocità media di migrazione è chiamata velocità di drift ed è dell’ordine dei mm/s, mentre la velocità
termica dell’elettrone a temperatura ambiente (T=300 K) è dell’ordine di 105 m/s.
Intensità di corrente elettrica.
Si definisce intensità di corrente elettrica il rapporto fra la carica totale ΔQ che attraversa in un intervallo di
tempo Δt una generica sezione del conduttore:
i=
ΔQ
Δt
L’unità di misura della corrente è l’ Ampere= 1Coulomb/ 1 secondo, il cui simbolo è A.
Legame fra intensità di corrente e velocità media di traslazione degli elettroni.
Intuitivamente la corrente che circola in un conduttore deve dipendere da quanti elettroni (per unità di
volume) ci sono e dalla velocità media degli elettroni.
Supponiamo di considerare un filo di sezione A all’interno del quale gli elettroni si muovono con una
velocità media v. La situazione è schematizzata in figura:
A
Δx=vΔt Gli elettroni che nell’intervallo di tempo Δt attraversano la sezione A sono tutti e solo quelli contenuti in un
cilindretto di base A e altezza Δx = vΔt , cioè di volume ΔV= A vΔt.
Se n rappresenta il numero di elettroni di conduzione per unità di volume, il numero N di elettroni che
attraversa la sezione A nel tempo Δt è semplicemente:
N = n ⋅ ΔV = n A vΔt
Poiché ogni elettrone porta una carica e, la carica totale ΔQ che attraversa nel tempo Δt la sezione A è
semplicemente:
ΔQ = N e = n A vΔt e
La corrente che circola nel conduttore è quindi:
i=
ΔQ n A vΔt e
=
=n Ave
Δt
Δt
Legge di Ohm.
In un conduttore esiste una relazione di proporzionalità diretta fra la differenza di potenziale ΔV applicata
agli estremi del conduttore e la corrente i che fluisce in esso:
ΔV = Ri
R è chiamata resistenza elettrica e si misura in Volt/Ampere=Ohm (Ω).
Resistività.
Per un conduttore filiforme di sezione costante la resistenza R risulta direttamente proporzionale alla
lunghezza l del filo e inversamente proporzionale alla sezione A. La costante di proporzionalità, che dipende
dal tipo di materiale, viene chiamata resistività ρ:
R=ρ
l
A
La resistività ρ si misura in Ω m.
L’inverso della resistività viene chiamato conducibilità σ=1/ρ e si misura in Ω-1 m -1 (chiamata siemens).
Variazione della resistività con la temperatura.
La resistività di un materiale varia con la temperatura in base alla legge
ρ = ρ 0 (1 + α t )
dove ρ0 è la resistività a t=0°C, e α è il cosiddetto “coefficiente di temperatura” (in °C-1).
Questa legge è simile a quella che regola la dilazione lineare di un corpo.
La resistività aumenta all’aumentare della temperatura perché le vibrazioni degli ioni del reticolo cristallino
hanno maggiore ampiezza, e di conseguenza impediscono maggiormente il movimento ordinato degli
elettroni quando viene applicato un campo elettrico esterno. A più bassa temperatura l’ampiezza delle
vibrazioni è inferiore, il movimento è più agevole e la resistività diminuisce.
In alcuni materiali detti superconduttori la resistività diventa nulla a basse temperature. Per esempio
l’alluminio diventa superconduttore a circa 1.18 K, mentre il mercurio a circa 4.2 K.
Alcune leghe metalliche diventano superconduttrici a T<20K. (Dopo il 1987 si scoprì che alcuni ossidi ceramici
diventano superconduttori a temperature molto più alte, e possono mantenere la superconduttività fino a temperature
superiori a 90K e alcuni addirittura fino a 120 K).
Regime ohmico.
Applichiamo ad un materiale una certa differenza di potenziale ΔV e misuriamo la corrente i che circola in
esso.
Se il grafico della i misurata in funzione della ΔV applicata è una retta, allora il materiale è ohmico (cioè
obbedisce alla legge di Ohm).
i non ohmico ohmico m=1 / R ΔV
Se il grafico non è rettilineo il materiale è detto non ohmico.
Effetto Joule.
Quando viene applicata una differenza di potenziale ΔV ad un conduttore, si genera un campo elettrico E
all’interno del conduttore e di conseguenza circola una corrente i. L’effetto Joule non è altro che il
riscaldamento di un conduttore causato dalla corrente che circola in esso.
Le forze del campo agendo sugli elettroni per un certo tratto Δs fanno su di essi un certo lavoro L=FΔs
aumentandone l’energia cinetica. Al momento dell’urto con gli ioni del reticolo cristallino gli elettroni
trasferiscono al reticolo l’energia cinetica acquistata. Questo trasferimento di energia determina un aumento
della temperatura del conduttore e quindi si manifesta come sviluppo di calore (effetto Joule).
Il lavoro fatto dalle forze del campo nel tratto Δs è L=FΔs= qEΔs = qΔV (in quanto EΔs = ΔV ). Questo
lavoro diventa calore ceduto al reticolo. Il lavoro fatto per unità di tempo rappresenta la potenza. La quantità
di calore sviluppata per unità di tempo (cioè la potenza termica sviluppata per effetto Joule) è quindi
P=
calore L qΔV
=
=
= iΔV
Δt
Δt
Δt
Tenendo conto che ΔV = Ri possiamo scrivere
P = iΔV = i 2 R
Oppure, tenendo conto che i =
ΔV
,
R
ΔV 2
P = iΔV =
R
Dalla formula di sopra sembra che la potenza dissipata in una resistenza è inversamente proporzionale a R (R
sta a denominatore). Dalla penultima sembra invece la potenza dissipata in una resistenza è direttamente
proporzionale a R (R sta a numeratore). Questa apparente contraddizione si risolve se uno pensa al fatto che
per far circolare una corrente in un conduttore bisogna collegare il conduttore a un generatore. Se si collega a
un generatore di differenza di potenziale costante (una batteria o un alimentatore) allora ΔV =costante e la
potenza dissipata è inversamente proporzionale alla resistenza. Questo è il caso più comune.
Se invece si usasse un generatore di corrente costante (cioè uno strumento che fa circolare una corrente
costante in un circuito) allora i=costante e la potenza dissipata nel conduttore sarebbe direttamente
proporzionale alla sua resistenza.
GENERATORI
Affinché all’interno di una resistenza possa circolare una corrente è necessario che ai capi della resistenza
venga applicata una differenza di potenziale (d.d.p.). E’ necessario avere a disposizione un apparecchio
chiamato “generatore di tensione” capace di mantenere una d.d.p. fra i due punti ai quali esso è collegato.
Le comuni batterie sono esempi di generatori di tensione.
Il simbolo circuitale del generatore di tensione è questo:
+
‐
il segmento più lungo indica il polo (morsetto) positivo, quello più corto indica il polo negativo.
All’interno di una resistenza R la corrente (pensata come flusso di cariche positiva) circola dal punto a
potenziale più alto al punto a potenziale più basso All’interno della batteria invece le cariche positive si
spostano dal polo negativo al polo positivo (mentre le cariche negative si spostano dal polo positivo a quello
negativo). Il lavoro fatto dalla batteria sulle cariche elettriche è fatto a spese dell’energia chimica della
batteria stessa (che infatti tende a scaricarsi).
+ +
‐
R
+ i Il ruolo svolto da un generatore di tensione è analogo a quello svolto da una pompa idraulica che
costantemente ripristina il dislivello fra due vasi comunicanti portando l’acqua dal recipiente a sinistra a
quello a destra, in verso opposto al campo gravitazionale che tende a far scorrere l’acqua dal recipiente di
destra a quello di sinistra. Per fare circolare costantemente acqua dobbiamo utilizzare una pompa sfruttando
energia elettrica (dobbiamo mettere la spina per far funzionare la pompa !). Per far circolare corrente con
continuità dobbiamo utilizzare la batteria, sfruttando la sua energia chimica.
pompa Δh Ogni generatore è caratterizzato da una forza elettromotrice (f.e.m.).
Def: la f.e.m. di un generatore è la d.d.p. misurata tra i poli del generatore a circuito aperto.
Se invece il circuito è chiuso (e quindi circola corrente) la differenza di potenziale tra i poli del generatore è
minore della f.e.m.
Attenzione, anche se viene chiamata forza elettromotrice, non si tratta di una forza (e quindi non si misura in
Newton), ma di una differenza di potenziale e si misura in Volt.
Un generatore reale presenta una certa resistenza interna r. Schematicamente esso viene rappresentato come
una sorgente di f.e.m. con in serie una resistenza r.
r
+
‐
f.e.m. E’ la caduta ai capi della resistenza interna del generatore che fa sì che a circuito chiuso (cioè quando circola
corrente) la d.d.p. fra i poli è minore della f.e.m.
Per determinare la corrente che circola in un circuito in cui c’è un generatore reale e una resistenza di carico
R utilizziamo la 2a legge di Kirchhoff (chiamata anche “teorema della maglia”).
2a legge di Kirchhoff: la somma algebrica delle differenze di potenziale che si incontrano in una maglia è
nulla (dove per “maglia” si intende un qualsiasi percorso chiuso all’interno di un circuito).
Questa legge è una conseguenza del fatto che il campo elettrostatico è conservativo, cioè che il lavoro fatto
dalle forze del campo in un percorso chiuso è zero.
Nell’applicare la 2a legge di Kirchhoff per l’analisi di un circuito bisogna ricordare che:
1) quando si attraversa una resistenza R nel verso della corrente il potenziale diminuisce della quantità Ri;
2) quando si attraversa un generatore dal polo negativo al polo positivo il potenziale aumenta di una quantità
pari alla f.e.m. del generatore.
A
i
r
i
i
R
f.e.m. i
B
Considerando il circuito a una sola maglia di figura, partendo per esempio dal punto B e percorrendo il
circuito nel verso della corrente, avremo:
f .e.m. − R i − r i = 0
f .e.m. = R i + r i = ( R + r ) ⋅ i
i=
f .e.m.
R+r
La d.d.p. ai capi della resistenza R (cioè fra i morsetti del generatore a circuito chiuso) è:
ΔV = V A − VB = R ⋅ i =
R
f .e.m.
R+r
la d.d.p. ΔV fra i poli del generatore a circuito chiuso è minore della f.e.m. del generatore, infatti
R
<1.
R+r
Inoltre, dalla 2a legge di Kirchhoff f .e.m. − R i − r i = 0 , si vede chiaramente che:
ΔV = R ⋅ i = f .e.m. − r ⋅ i
la d.d.p. tra i poli di un generatore a circuito chiuso è uguale alla f.e.m. del generatore diminuita della caduta
di tensione r i attraverso la resistenza interna del generatore.
Resistenze in serie
Due (o più resistenze) sono collegate in serie quando sono attraversate dalla stessa corrente.
A i ΔV R1
B i R2
ΔV1 ≡
ΔV i
Rs ΔV2 C La resistenza equivalente Rs di due resistenze R1 ed R2 collegate in serie è quella resistenza che sottoposta
alla stessa d.d.p. a cui è sottoposta la serie R1 ed R2 fa circolare nel circuito la stessa corrente che circola in R1
ed R2.
La d.d.p. ΔV fra i punti A e C è semplicemente la somma della d.d.p. ΔV1 fra A e B e ΔV2 fra B e C:
ΔV = ΔV1 + ΔV2 = R1 i + R2 i = ( R1 + R2 ) ⋅ i
D’altra parte attraverso la resistenza Rs (che vogliamo determinare), quando viene applicata la d.d.p. ΔV
,deve circolare la stessa corrente i che circola in R1 ed R2:
ΔV = Rs ⋅ i
Rs i = ( R1 + R2 )i
Rs = R1 + R2
La resistenza equivalente di due resistenze in serie è uguale alla somma delle singole resistenze.
Resistenze in parallelo.
Due resistenze sono collegate in parallelo se sono sottoposte alla stessa differenza di potenziale.
ΔV i1
R1
i2
R2
Un punto del circuito in cui si incontrano tre o più fili (“rami”) è chiamato “nodo”.
1a legge di Kirchhoff: in un nodo la somma delle correnti entranti deve essere uguale alla somma delle
correnti uscenti.
La 1a legge di Kirchhoff rappresenta la legge di conservazione della carica elettrica.
Vogliamo calcolare la resistenza equivalente Rp di due resistenze R1 ed R2 collegate in parallelo, cioè quella
resistenza che sostituita alle resistenze R1 ed R2 collegate in parallelo non altera le condizioni del circuito
(cioè quella resistenza Rp che sottoposta alla stessa d.d.p. ΔV a cui sono sottoposte R1 ed R2 fa circolare nel
circuito la stessa corrente che circola complessivamente in R1 e in R2).
Nel nodo A di figura entra la corrente i, ed escono le correnti i1 ed i2:
i = i1 + i2
Per la legge di Ohm i1 =
ΔV
ΔV
ΔV
, i2 =
ei=
quindi
R1
R2
Rp
ΔV ΔV ΔV
=
+
Rp
R1
R2
1
1
1
=
+
R p R1 R2
o anche
Rp =
R1 R2
R1 + R2
L’inverso della resistenza equivalente di due resistenze collegate in parallelo è uguale alla somma degli
inversi delle resistenze.
Rp è più piccola della più piccola delle due resistenze.