REGOLATORE DI TENSIONE-PARALLELO
L’ultimo blocco della struttura che effettua la conversione da tensione alternata ( 220 V a 50
Hz ) a tensione continua è il regolatore di tensione (serie o parallelo). Analizziamo il
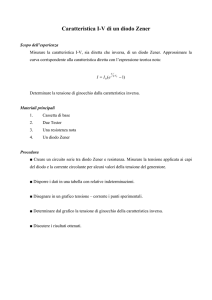
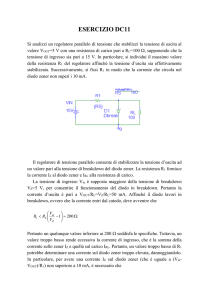
funzionamento del regolatore tensione-parallelo, mostrato in figura 1.a, il cui scopo è quello di
stabilizzare, al variare della tensione d’ingresso e della corrente assorbita dal carico RL, la tensione
d’uscita Vo.
Occorre dimensionare gli elementi del circuito in maniera tale da far funzionare il diodo in
zona Zener e consentirgli, così, di stabilizzare la tensione d’uscita ad un valore pressoché costante
(si può considerare un valore minimo e massimo entro cui si desidera limitare la variazione di
tensione sull’uscita). Qualitativamente il funzionamento può essere descritto nella seguente
maniera
Se la tensione d’ingresso aumenta (diminuisce), erogando, in tal maniera, più
(meno) corrente, il diodo Zener assorbirà più (meno) corrente limitando la variazione
di tensione sull’uscita ad un valore prestabilito dal progettista.
Se il carico assorbe più (meno) corrente, in seguito ad una diminuzione (aumento)
della sua impedenza, la corrente che viene assorbita dal diodo diminuisce (aumenta)
limitando la variazione di tensione sull’uscita ad un valore prestabilito dal progettista.
R
IZ
IR
+
IL
V
+
RL
Vi
-
Vo
DZ
-
Fig.1.a . Regolatore di tensione-parallelo
K
DZ
K
VZ0
-VZ0
1/rZ
-I Z,K
Vγ
I
rZ
A
A
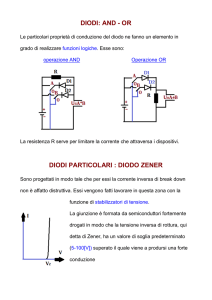
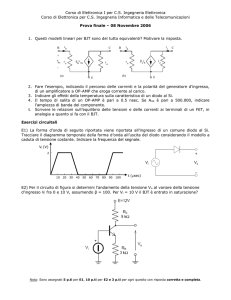
Fig.1.b . Modello di diodo zener in zona zener
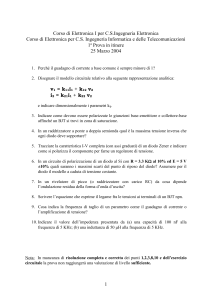
Fig.1.c . Caratteristica I-V linearizzata di un diodo zener
Naturalmente si possono verificare contemporaneamente due eventi che sortiscono lo stesso
effetto. Per esempio, si può assistere ad un aumento della tensione d’ingresso ed una diminuzione
della corrente assorbita dal carico: il diodo Zener assorbirà, quindi, una corrente più elevata che
nei singoli casi elencati prima, e dovrà, pertanto, essere scelto in maniera tale da poter sopportare
una corrente adeguata senza distruggersi! (Dovrà, in altri termini essere in grado di dissipare una
potenza sufficientemente elevata).
1
Oppure, si può verificare il caso critico in cui sia la tensione d’ingresso che l’impedenza offerta
dal carico diminuiscono (se RL diminuisce, aumenta la corrente che il carico assorbe per
mantenere costante la tensione ai suoi capi, imposta dal diodo in zona Zener): in tal caso la
corrente che fluirà sul diodo avrà un valore più basso di quanto non accada nei due casi elencati
sopra. Dunque, il progettista si dovrà assicurare che nel caso peggiore ( funzione della specifiche
di progetto) scorra sul diodo una corrente comunque sufficiente per mantenerlo in zona Zener
(quindi una corrente comunque superiore,in modulo, alla corrente di ginocchio -IZ,K ).
Ricapitolando, lo scopo del circuito è stabilizzare la tensione d’uscita, Vo, al variare della
tensione d’ingresso Vi (tra un valore Vi,max ed un valore Vi,min) e della corrente assorbita dal carico
(tra un valore di corrente IL,max e IL,min). Per avere una tensione d’uscita costante, o comunque con
un ripple, dato di progetto, occorre dimensionare R e scegliere il diodo DZ in modo opportuno.
Inoltre occorre tener conto delle prestazioni del circuito e quindi far riferimento ai parametri di
bontà e al rendimento η del circuito.
Scelta di R.
Per migliorare i parametri di bontà del circuito occorre, come vedremo, scegliere una resistenza
R di valore elevato. Tuttavia non possiamo utilizzarne una di valore troppo grande in quanto
occorre che sul diodo scorra una corrente sufficientemente elevata da mantenere il dispositivo in
zona Zener ( I Z > I Z , K ). Le leggi di Kirchhoff applicate al circuito di figura 1.a sono:
⎧Vi = RI R + VZ = RI R + VZ 0 + rZ (I R − I L )
⎪
⎨VO = Vi − VR
⎪I = I + I
L
Z
⎩ R
La minima corrente sul diodo Zener si ha in corrispondenza della minima tensione d’ingresso e
del carico minimo (dati di progetto). Osserviamo che ad un carico minimo corrisponde una
corrente massima, supponendo la tensione sul carico costante (grazie al diodo Zener). Quindi
Vi ,min − VZ 0 − rZ I Z ,min
, da cui
I Z , min = I R ,min − I L ,max ; ma I R ,min =
Rmax
Rmax =
Vi ,min − VZ 0 − rZ I Z ,min
(1)
I Z ,min + I L , max
Come già detto, Vi,min e IL,max sono dati di progetto. IZ,min si sceglie in base a esigenze di
rendimento e/o disponibilità di diodi.
η = PO Pi = VO I L Vi I R = VO I L ⎡⎣( I L + I Z )(VL + VR ) ⎤⎦
Pd = VZ I Z = ( VZ0 + rZ I Z ) I Z
(Rendimento)
(Potenza dissipata dal diodo)
2
Si sceglierà un diodo con corrente di ginocchio -IZ,K inferiore, in modulo, a IZ,min (che ha un
valore negativo); o si sceglieranno diversamente altri componenti: per esempio una R più piccola.
Scelta di DZ
Per completare la scelta del diodo occorre analizzare la IZ,max (e quindi la massima potenza
dissipabile dal diodo), e le specifiche di rendimento del circuito. Fondamentale, in tale discorso,
anche le specifiche su Vi,max e su IL,min (Vo=RL,max IL,min). Dalla LKT si ha
Vi , max = R (I Z , max + I L , min ) + V Z 0 + rZ I Z ,max
(2)
Noti R, Vi,max, IL,min, rZ e VZ0, la IZ,max risulta individuata. Si sceglierà un diodo che possa
sostenere tale corrente e che, quindi, possa dissipare una potenza pari a Pd ,max = V Z I Z , max . Si noti
che all’aumentare di IZ,max il rendimento diminuisce: più corrente assorbe il diodo e più potenza
viene dissipata inutilmente. Per aumentare il rendimento occorre accontentarsi di una Vi,max
inferiore e scegliere R più grandi.
Parametri di bontà.
Supponendo valide le condizioni di piccolo segnale (stiamo analizzando il circuito in
condizioni lineari, quindi stiamo effettuando una approssimazione in tal senso in quanto possiamo
avere a che fare con ampie variazioni di segnali!), è utile determinare i seguenti parametri:
∆Vo
∆Vo
;
B) Regolazione di carico:
.
∆V i
∆I L
Il primo è un indice di quanto l’uscita vari al variare della tensione d’ingresso (idealmente
desideriamo che tale parametro assuma valore nullo!).
Il secondo è un indice di quanto l’uscita vari al variare della corrente assorbita dal carico
(anche in questo caso desideriamo che tale parametro assuma valore nullo!).
Vediamo come si determinano questi parametri per il circuito in questione. Consideriamo,
dunque, come si trasforma il circuito di figura 1 nel caso di piccoli segnali (modello
incrementale).
A) Regolazione di linea:
R
R
+
+
rZ RL
∆ Vi
-
rZ
∆ Vo
+
∆ Vo
-
-
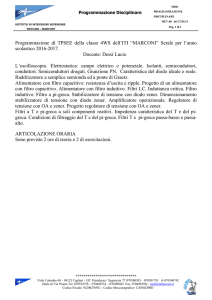
FIG. 2.a
∆I L
FIG. 2.b
3
Si noti che il diodo in zona Zener per piccolo segnale è stato rappresentato con la sua resistenza
incrementale rZ (che abbiamo approssimato alla resistenza per ampio segnale, linearizzando la
caratteristica corrente-tensione del diodo Zener).
Riferendoci alla figura 2.a, ci accorgiamo che la variazione della tensione d’uscita dovuta alla
variazione della tensione d’ingresso, rispettivamente i piccoli segnali ∆Vo e ∆Vi , altri non è che
un partitore resistivo. Per cui si ottiene immediatamente il seguente risultato
∆Vo
r // RL
r
= Z
≈ Z
∆Vi rZ // RL + R rZ + R
(3)
Noi desideriamo che tale parametro assuma un valore quanto più basso è possibile (idealmente
nullo!). Per ottenere questo risultato occorre utilizzare resistenze R quanto più grandi è possibile:
ci scontriamo, dunque, con la condizione (1) ricavata in fase di progetto. Occorre quindi un
compromesso, funzione in ogni caso delle specifiche di progetto.
Si noti, inoltre, che essendo rZ tipicamente dell’ordine della decina di Ω, il parallelo tra
quest’ultima e la resistenza di carico è approssimabile con la resistenza incrementale del diodo
Zener . Riferendoci alla figura 2.b, si ricava
∆Vo
r R
= Z
∆I L rZ + R
(4)
Anche in questo caso, per minimizzare il valore di tale parametro occorre scegliere R
idealmente infinita. Così facendo non otterremmo comunque un valore nullo bensì pari alla
resistenza di piccolo segnale rZ . Quindi per rendere la (4) piccola occorre scegliere diodi con
resistenza di Zener piccola (oltre che R di valore elevato).
4