Simulazione della seconda prova d’esame
Sistemi automatici – indirizzo Elettrotecnica ed elettronica
QUESITO 1
Una scheda di controllo a microcontrollore deve gestire la pinza di un robot.
Un trasduttore di posizione utilizzato per rilevare la posizione dell’oggetto che deve essere afferrato dalla
pinza è costituito da una coppia emettitore-ricevitore di luce infrarossa; ha un’uscita in tensione con
caratteristica lineare che presenta le seguenti caratteristiche:
-
alla distanza massima di 95 cm eroga 0,5 V;
alla distanza minima di 5 cm eroga 3 V.
Il segnale proveniente dal trasduttore deve essere:
-
condizionato nell’intervallo di tensione compreso tra 0 V e 5 V;
convertito in segnale numerico da un microcontrollore che fa parte della scheda di controllo.
Si deve tenere conto del fatto che il sistema deve valutare la posizione dell’oggetto con un errore massimo di
2 mm.
L’evoluzione dello stato del sistema deve essere osservata facendo uso o di display a 7 segmenti che
visualizzano in formato numerico la distanza pinza/oggetto o di una serie di LED che si
accendono/spengono sempre in relazione alla distanza pinza/oggetto.
Si richiede di:
1- rappresentare graficamente lo schema a blocchi dell’intero sistema ed in particolare del circuito che deve
essere utilizzato per il condizionamento del segnale descrivendo le funzioni svolte dai singoli blocchi e
identificandone la relazione ingresso/uscita;
2- rappresentare una possibile soluzione circuitale per il circuito di condizionamento;
3- identificare almeno un microcontrollore compatibile con questo tipo di applicazione evidenziando in
particolare le caratteristiche del convertitore ADC in termini di risoluzione e di periodo di campionamento;
4- realizzare il diagramma di flusso relativo al sistema di acquisizione e visualizzazione dei dati e scrivere il
codice del programma facendo riferimento ad un microcontrollore scelto in precedenza.
QUESITO 2
Il motore in corrente continua preposto al movimento di un nastro trasportatore viene inserito in un sistema
di controllo ad anello chiuso.
Sono note le seguenti caratteristiche del motore:
-
costante di tempo elettrica = 0,125 ms
costante di tempo meccanica = 1,25 ms
costante di macchina = 0,04 V/s∙rad
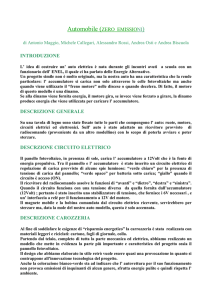
La dinamo tachimetrica presenta la caratteristica riportata in figura.
© Zanichelli Editore S.p.A., 2016
Caratteristica della dinamo tachimetrica
Si conoscono inoltre i seguenti dati:
-
quando il motore gira ad una velocità di 100 rad/s la tensione rilevata dal nodo di confronto deve valere
5 V;
il circuito di comando del motore (modulo di potenza) ha una costante di guadagno pari a 1,6 e una
costante di tempo di 12,5 ms.
Si richiede di:
1- descrivere il sistema con uno schema a blocchi calcolandone la funzione di trasferimento d’anello;
2- discutere sulla stabilità del sistema;
3- evidenziare l’utilità dell’introduzione di un regolatore proporzionale a valle del nodo di confronto e
dimensionarlo in modo tale da ottenere un margine di fase che garantisca la stabilità del sistema.
© Zanichelli Editore S.p.A., 2016