SISTEMI DI CONTROLLO
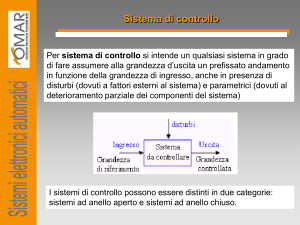
Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza
d’uscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza di
disturbi.
I sistemi di controllo possono essere distinti in due categorie:
sistemi ad anello aperto
sistemi ad anello chiuso
.
SISTEMA DI CONTROLLO AD ANELLO APERTO
Nei sistemi ad anello aperto l’azione di controllo è indipendente dall’uscita; non si opera nessuna
misura della grandezza d’uscita.
Esempio
Consideriamo un sistema di controllo di temperatura ad esempio di un forno a gas.
In questo sistema la temperatura, grandezza da controllare, viene scelta mediante il posizionamento
di una manopola che regola l’erogazione del gas al bruciatore
In questo sistema non si opera nessun controllo sulla grandezza d’uscita.
Il controllo ad anello aperto presenta lo svantaggio che un’eventuale variazione dell’uscita rispetto
al valore desiderato, dovuta ad es. ai disturbi, non viene percepita in ingresso.
SISTEMA DI CONTROLLO AD ANELLO CHIUSO
Nei sistemi ad anello chiuso detti anche sistemi a retroazione (feedback) l’azione di controllo
dipende dall’uscita.
L’uscita, viene continuamente misurata ed il suo valore è confrontato con una grandezza di
riferimento (Vi) detta SET POINT, in modo da produrre, ogni qualvolta ci sia una diversità fra
l’uscita reale e quella voluta, un azione correttiva che riporti l’uscita al valore desiderato.
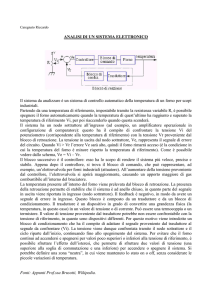
Un sistema di controllo ad anello chiuso può essere schematizzato nel seguente modo:
1
Blocco di reazione
E’ costituito da un trasduttore che effettua la conversione della grandezza fisica da controllare
(temperatura, velocità, ecc. ) in un segnale elettrico proporzionale e da un blocco di
condizionamento che adatta il segnale generato dal trasduttore per essere confrontato con il segnale
di riferimento
Nodo sottrattore
Il nodo sottrattore ha il compito di elaborare il segnale di riferimento e quello di reazione e quindi di
generare il segnale errore Ve che opera l’opportuna azione correttrice.
Nei sistemi continui il dispositivo che effettua il confronto (nodo sottrattore) è realizzato con un
amplificatone in connessione differenziale, nei sistemi di controllo On-Off invece con un
comparatore.
Controllore
Il controllore ha lo scopo di manipolare il segnale errore, è presente se occorre migliorare il
comportamento dell’intero sistema in termini di velocità, precisione e stabilità, può essere una rete
correttrice oppure un regolatore industriale.
Blocco di comando attuatore
Il segnale proveniente dal nodo sottrattore opportunamente trattato, comanda l’attuatore
(riscaldatore, motore, ecc) per produrre il segnale d’uscita desiderato.
Il blocco di comando attuatore in genere è composto da un preamplificatore e da un amplificatore di
potenza.
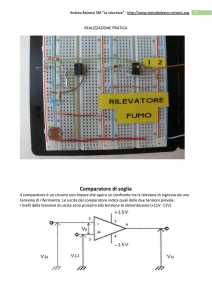
ESEMPIO DI CONTROLLO AUTOMATICO DI VELOCITA’ DI UN MOTORE IN CORRENTE
CONTINUA
Descrizione dei blocchi:
Il sistema di reazione trasduce la velocità di rotazione in tensione (Vr)
Il potenziometro fornisce la tensione di riferimento (Vi)
2
Il nodo sottrattore confronta la tensione di riferimento (Vi) con quella proveniente da
sistema di trasduzione e produce il segnale errore. ( Ve = Vi-Vr )
Il controllore ha lo scopo di manipolare il segnale errore; è presente se occorre migliorare il
comportamento dell’intero sistema in termini di velocità, precisione e stabilità, può essere
una rete correttrice oppure un regolatore industriale (PID)
Il blocco di comando (amplificatore), fornisce al motore il valore opportuno di tensione per
mantenere costante la velocità . (Esso rappresenta l’elemento di regolazione)
Principio di funzionamento.
Fissato tramite il potenziometro il valore della tensione di riferimento Vi (quindi la velocità di
rotazione del motore), se il motore tende a rallentare, diminuirà la tensione proveniente dal
blocco di reazione (Vr), aumenterà l’errore (Ve) e la tensione ai capi del motore, di conseguenza
aumenterà anche la velocità del motore, compensando così la diminuzione di velocità.
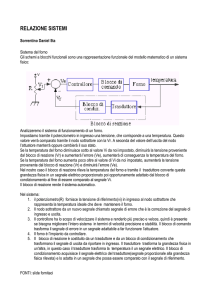
ESEMPIO DI CONTROLLO AUTOMATICO DI TEMPERATURA DI UN FORNO
Descrizione dei blocchi:
Il blocco di reazione trasduce la temperatura in tensione (Vr). È costituito dall’insieme del
trasduttore (ad es. termocoppia) e dal blocco di condizionamento. Il blocco di
condizionamento ha la funzione di adattare i valori di tensione generati dalla termocoppia
per il confronto con la tensione di riferimento.
Il potenziometro fornisce la tensione di riferimento (Vi) ; rappresenta il valore della
temperatura “ideale” che si vuole mantenere nel forno;
Il nodo sottrattore confronta la tensione di riferimento (Vi) con quella proveniente da
sistema di trasduzione e produce il segnale errore. ( Ve = Vi-Vr ); Il nodo sottrattore in
genere è realizzato con un amplificatore operazionale.
Il controllore ha lo scopo di manipolare il segnale errore; è presente se occorre migliorare il
comportamento dell’intero sistema in termini di velocità, precisione e stabilità, può essere
una rete correttrice oppure un regolatore industriale (PID)
3
Il blocco di comando è costituito, ad es. da una elettrovalvola proporzionale, in grado cioè di
modulare l’apertura in funzione della tensione di pilotaggio; in uscita si avrà quindi una
portata di combustibile proporzionale alla tensione stessa.
Il forno” è l’impianto da controllare è costituito dall’insieme del bruciatore e del forno vero
e proprio.
Principio di funzionamento.
Fissato tramite il potenziometro il valore della tensione di riferimento Vi (quindi la temperatura del
forno), se la temperatura del forno diminuisce , diminuirà la tensione proveniente dal blocco di
reazione (Vr), aumenterà l’errore (Ve) e quindi la tensione ai capi dell’elettrovalvola , di
conseguenza aumenterà la quantità di combustibile e quindi aumenterà la temperatura del forno,
compensando così la diminuzione di temperatura.
4
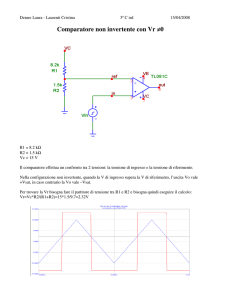
SISTEMA DI CONTROLLO ON/OFF
Il sistema di controllo ON/OFF, (a funzionamento intermittente nel tempo), viene usato quando non
si richiede una elevata precisione; esso è economico e semplice da realizzare.
La struttura base è la seguente:
E’ cosi chiamato perché il dispositivo che effettua il confronto (comparatore) tra la grandezza
d’uscita convertita in tensione (Vr), tramite il blocco di reazione e quella di ingresso (Vi), ha
solamente due stati possibili alto (h) o basso (l).
Caratteristica del comparatore:
se Vr < Vi ⇒ Ve = “h”
se Vr > Vi ⇒ Ve = “l”
Principio di funzionamento del sistema:
Se l’uscita è minore di quella desiderata (impostata tramite Vi), il comparatore venendosi a
trovare allo stato alto, attiva l’attuatore (ad es. riscaldatore, motore, ecc) per mezzo del
blocco di comando.
Non appena l’uscita raggiunge il valore desiderato il comparatore commuta allo stato basso,
disattivando così l’attuatore.
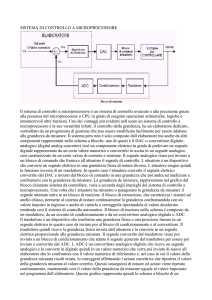
SISTEMA DI CONTROLLO A MICROPROCESSORE
Il sistema di controllo a microprocessore fa uso di un elaboratore o di un sistema a μP dedicato; ha
un funzionamento che dipende dal programma di gestione.
Vantaggi:
Il vantaggio più evidente è quello della versatilità, infatti se si vuole variale il valore della
grandezza da controllare, basta modificare il programma di gestione senza intervenire sull’hardware
5
Il blocco di reazione acquisisce la grandezza da controllare e la converte in formato digitale
L’elaboratore legge il dato digitale, lo confronta con il valore di riferimento
precedentemente impostato e invia il risultato dell’elaborazione al convertitore D/A..
Il convertitore D/A lo converte in segnale analogico. e lo invia al blocco di commando
Il blocco di comando fornisce all’attuatore il segnale opportuno di controllo .
Note:
Se la grandezza da controllare varia velocemente prima del convertitore A/D, bisogna
inserire il blocco Sample-Hold, per mantenere stabile il segnale durante il processo di
conversione.
Nei sistemi di controllo on/off a microprocessore manca il convertitore D/A.
6