DINAMICA
1. INTRODUZIONE ALLA DINAMICA....................................................................... 36
2. LA SECONDA LEGGE DELLA DINAMICA........................................................... 36
3. LA MASSA INERZIALE............................................................................................. 38
4. LA LEGGE DI NEWTON E LO SPAZIO DELLE FASI......................................... 40
5. TEOREMA DELL’IMPULSO .................................................................................... 42
6. IL TERZO PRINCIPIO DELLA DINAMICA (AZIONE E REAZIONE) ............. 44
7. IL PRIMO PRINCIPIO DELLA DINAMICA (LEGGE D’INERZIA)................... 45
8. CAMPI DI FORZE ....................................................................................................... 46
9. L’ENERGIA POTENZIALE ....................................................................................... 48
10. IL LAVORO COMPIUTO DA UN CAMPO DI FORZE ....................................... 49
11. ESEMPIO DI FORZA CONSERVATIVA: LA FORZA ELASTICA................... 51
12. ESEMPIO DI FORZA DISSIPATIVA: ATTRITO................................................. 52
13. TEOREMA DELL’ENERGIA CINETICA ............................................................. 53
14. TEOREMA DI CONSERVAZIONE DELL’ENERGIA TOTALE MECCANICA
............................................................................................................................................. 53
15. L’ENERGIA DI UN MOTO AD ACCELERAZIONE COSTANTE..................... 54
16. L’ENERGIA DI UN MOTO ARMONICO .............................................................. 56
17. L’ENERGIA DI UN CAMPO GRAVITAZIONALE.............................................. 58
18. CAMPI DI FORZA CENTRALI............................................................................... 60
19. PATTINATORE SUL GHIACCIO E MOMENTO ANGOLARE ........................ 62
20. IL GIROSCOPIO........................................................................................................ 63
21. I CAMPI CENTRALI DI FORZA ELASTICA ....................................................... 63
22. IL CAMPO DI FORZA GRAVITAZIONALE ........................................................ 66
23. IL TEOREMA DI GAUSS ......................................................................................... 67
24. IL CAMPO GRAVITAZIONALE ALL’INTERNO DI UNA MASSA SFERICA
UNIFORME ...................................................................................................................... 69
25. IL CAMPO DI FORZA GRAVITAZIONALE GENERATO DA UNA MASSA
SFERICA UNIFORME .................................................................................................... 70
34
26. LA FORZA DI GRAVITÀ TERRESTRE................................................................ 72
27. IL PENDOLO SEMPLICE (LE PICCOLE OSCILLAZIONI) ............................. 74
28. IL PROBLEMA DI KEPLERO................................................................................. 76
29. IL TEOREMA DEL VIRIALE PER LA PARTICELLA SINGOLA.................... 78
30. OLTRE L’UNIVERSO MECCANICO DI NEWTON............................................ 81
La serie di Balmer.........................................................................................................................82
L’atomo idrogenoide.....................................................................................................................84
Il modello di Bohr.........................................................................................................................85
Descrizione ondulatoria. ...............................................................................................................86
L’equazione di Schroedinger ........................................................................................................87
I polinomi di Hermite e l’oscillatore armonico quantistico. .........................................................87
Il principio di corrispondenza e l’oscillatore quantistico..............................................................89
35
1.INTRODUZIONE ALLA DINAMICA
Il passo successivo alla cinematica consiste nel cercare di rispondere alla
seguente domanda : qual’è la causa del moto ?
Newton riuscì a trovare una risposta inventando così la dinamica, che dunque
è quella branca della Fisica che studia le cause del moto e le leggi naturali che
collegano le cause con gli effetti.
Osservando i fenomeni naturali Newton scoperse che alcuni moti, non tutti,
apparivano essere connessi con una ben precisa causa.
Se ad esempio un giocatore di bigliardo colpisce con una stecca una biglia
ferma essa si pone in movimento e tanto maggiore è il colpo tanto più
velocemente la biglia si muove. Inoltre la direzione di moto della biglia
dipende dalla direzione da cui proviene il colpo. Da questo esempio
sembrerebbe di capire che la causa del moto deve essere una grandezza
vettoriale, perchè l’effetto del colpo dipende sia dall’intensità che dalla
direzione.
Tuttavia vi erano moti che almeno apparentemente non sembravano causati
da nulla: il moto dei pianeti, la caduta dei corpi pesanti, ecc.
L’ipotesi di Newton era molto semplice ma assolutamente rivoluzionaria:
assumere che qualsiasi moto fosse causato da una grandezza fisica vettoriale,
cui diede il nome di FORZA. In particolare Newton riuscì a spiegare le leggi
empiriche di Keplero sul moto dei pianeti, inventando la forza di gravità.
Noi oggi sappiamo che il nostro Universo è governato soltanto da quattro
forze fondamentali, di cui una è la forza di GRAVITÀ, le altre sono:
• la forza ELETTROMAGNETICA (responsabile dei fenomeni luminosi,
fenomeni elettrici e magnetici, formazione di atomi e molecole, ecc.),
• la forza FORTE (responsabile dell’aggregazione della materia nei
nuclei atomici),
• la forza DEBOLE (responsabile dei decadimenti radioattivi).
Proprio lo studio delle caratteristiche di queste forze ci ha portato a
comprendere non soltanto i fenomeni del mondo microscopico, ma ad
esempio anche i meccanismi di formazione e di evoluzione dell’Universo su
grande scala.
2.LA SECONDA LEGGE DELLA DINAMICA
Partendo dalle tre leggi empiriche che Keplero aveva dedotto dai dati
astronomici sul moto dei pianeti di Tycho Brahe, e assumendo che esistesse
una forza gravitazionale che determinava tale moto dipendente dall’inverso
del quadrato della distanza dei pianeti dal sole, Newton dedusse la seguente
equazione fondamentale della dinamica o Legge di Newton:
36
r
r
1. F = m a
r
Tale legge definisce una relazione analitica tra la causa (la forza F ) e
r
l'effetto (l'accelerazione a ) del moto di un corpo. La costante m rappresenta
una proprietà del corpo che si chiama massa inerziale, che dipende soltanto
dalla quantità di materia che compone il corpo.
Il nome inerziale deriva dal fatto che tale grandezza rappresenta qualche cosa
che in un certo modo si oppone al moto. Infatti dall’equazione (1) a parità di
forza applicata al corpo, tanto maggiore è la massa, tanto minore è l’effetto del
moto (accelerazione). Nel caso limite di un corpo con massa infinita non si ha
nessun movimento qualunque sia la forza che agisce sul corpo. In altri termini
si puo dire che la massa inerziale di un corpo è la proprietà che fa sì che il
corpo resista alle variazioni della propria velocità.
Nella descrizione di Newton tale massa è costante, mentre è noto che nella
teoria della Relativitá Ristretta di Einstein la massa dipende dalla velocita.
Tale dipendenza diventa rilevante soltanto quando il corpo si muove con
velocità prossime a quella della luce (300.000 Km/s). Per i processi di moto a
velocita piu basse (ad esempio i pianeti che si muovono attorno al sole con
velocità di circa 5-30 Km/s) l’approssimazione newtoniana è accettabile.
È importante osservare che l'equazione fondamentale della dinamica
non è una equazione algebrica ma differenziale del second'ordine il cui
r
integrale generale è la posizione r :
r
r
d 2 r (t )
2. F = m
dt 2
r
dove cioè l'incognita è la funzione r (t ) del tempo t e la soluzione esplicita
del moto (integrale particolare dell'eq.(2)) dipende ovviamente da due
parametri arbitrari che chiamiamo condizioni iniziali
r
r
⎧ r (t = 0) = r 0
3. ⎨ r
r
⎩v (t = 0 ) = v 0
r
r
dove r 0 posizione iniziale e v 0 velocità iniziale permettono di definire i
due parametri arbitrari da cui dipende l'integrale generale dell'eq.(2) .
Naturalmente questa legge non ha senso se non si definiscono gli
osservatori (sistemi di riferimento) rispetto ai quali essa vale. La risposta a
questa domanda sarà data dal primo principio della dinamica.
L’equazione (2) si può anche scrivere:
r
r
dv
4. F = m
dt
e dunque una forza causa una variazione di velocità. Quindi tutte le volte
che si verifica su di un corpo un cambiamento di velocità ciò vuol dire che su
tale corpo ha agito una forza.
Esempio 1: Una palla di bigliardo colpita dalla stecca di un giocatore si
mette in moto sul tavolo. Ciò significa che il giocatore ha applicato una forza
37
sulla palla mediante la stecca. Con la legge di Newton siamo in grado di
calcolare la forza F impressa dal giocatore sulla biglia:
Δv m
F=m
= v
Δt Δt
essendo v la velocità assunta dalla biglia e Δt l’intervallo di tempo durante
il quale la stecca è stata a contatto con la biglia. Supponendo che il tempo di
contatto sia sempre lo stesso, si può concludere che la velocità della biglia è
proporzionale alla forza impiegata. La grandezza FΔt si chiama anche
impulso della forza, e in tal caso la forza è una forza impulsiva.
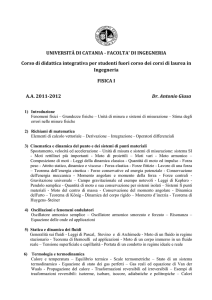
Esempio 2: Una palla di bigliardo in moto con velocità costante v urta
contro una sponda del tavolo da bigliardo. La palla rimbalza, cioè cambia
almeno la direzione se non il modulo della sua velocità. Allora si può dire che
la sponda del tavolo da bigliardo ha applicato una forza sulla biglia:
Figure 1
ed essendo l’angolo di incidenza uguale all’angolo di riflessione, ne
consegue che la forza F è diretta perpendicolarmente alla sponda del
bigliardo.
3.LA MASSA INERZIALE
Il rapporto tra la causa del moto (forza) e l'effetto (accelerazione) é una
costante che dipende soltanto dalla quantità di materia contenuta nel corpo su
cui la forza agisce. Questo rapporto si chiama massa inerziale perché
rappresenta essenzialmente la capacità di ogni corpo ad opporsi al moto, cioè
è la sua inerzia a rispondere alle forze che lo sollecitano a muoversi. Con un
ragionamento al limite potremmo dire che, se esistesse nell'universo un corpo
con massa estremamente grande (diciamo infinita), esso persisterebbe nel suo
38
stato di moto, ad esempio starebbe fermo, qualunque fosse la forza che su di
esso agisce.
Ricordiamoci che Newton assunse la seguente forma per la forza
gravitazionale:
r
r
M g mg r
5. F = −G
r2 r
dove G è una costante che si chiama costante di gravitazione universale, Mg
ed mg sono le masse gravitazionali del sole e del pianeta rispettivamente ed r
è il vettore posizione del pianeta rispetto al sole. In linea di principio massa
inerziale m e gravitazionale mg possono rappresentare due proprietà diverse
della materia. Mettendo assieme quest’ultima equazione (5) con la (1) si
ottiene:
⎛ GM g ⎞⎛ m g ⎞
a = −⎜ 2 ⎟⎜ ⎟
⎝ r ⎠⎝ m ⎠
e siccome la prima parentesi non dipende dal corpo, l’accelerazione a dipende
soltanto dal rapporto tra massa gravitazionale e massa inerziale. Siccome però
l’accelerazione di gravità è uguale tra tutti i corpi (g sulla terra) allora il
rapporto:
mg
= 1±10 −11
m
non può dipendere dal corpo, le due masse devono perciò essere tra loro
proporzionali per lo stesso corpo. Gli esperimenti confermano che queste due
grandezze sono proporzionali tra di loro. Quindi pur di scegliere
opportunamente le unità di misura tali masse si possono far coincidere.
Gli esperimenti sino ad oggi hanno dimostrato che tale coincidenza è
verificata entro un fattore 10-11.
Qualche considerazione si deve anche fare per chiarire cosa intendiamo
per quantità di materia di cui é composto il corpo. Intanto osserviamo che
nell'universo esistono fenomeni immateriali, cioé a massa nulla. Basti
ricordare i fenomeni elettromagnetici in cui si manifestano i fotoni che sono
particelle senza massa dotate soltanto di energia. Oggi noi sappiamo che la
materia é essenzialmente concentrata nei nuclei degli atomi, che sono
composti da protoni e neutroni. Queste particelle si chiamano anche barioni,
possiamo quindi dire che la massa inerziale di un corpo é essenzialmente
proporzionale dunque al numero di barioni che lo costituiscono. Il problema
della materia barionica è di grande attualità per almeno due aspetti di grande
rilevanza: la stabilità della materia e la chiusura dell'universo.
Le più recenti teorie così dette di grande unificazione prevedono la
possibilità che il protone non sia stabile, cioè che la materia barionica possa
decadere trasformandosi in energia. Questo processo naturalmente deve
essere molto raro per il fatto stesso che noi vediamo l'universo esistere ancora
dopo 13 miliardi di anni di vita. Infatti i più attuali limiti sul tempo di
decadimento del protone (vita media) forniscono 1032 anni.
La quantità di materia totale contenuta nell'universo è direttamente
collegata con la possibilità o meno che l'universo stesso, attualmente in una
39
fase espansiva dopo il big bang, possa ad un certo momento cominciare una
nuova fase compressiva per effetto delle dominanti forze gravitazionali. Le
misure attualmente valide danno come risultato che la quantità di materia
barionica contenuta nell'universo non sarebbe sufficiente per giustificare una
tale compressione, portando quindi alla descrizione di un universo in
espansione indefinita. È da questa osservazione che, per esempio si ipotizza
la presenza di un altro tipo di materia non barionica, cioè non composta da
protoni e neutroni, che per il fatto di non essere visibile ha preso il nome di
materia oscura. Recentissime misure fatte sui satelliti hanno inoltre mostrato
che nell’Universo deve esistere anche una forma di energia, fino ad ora
sconosciuta: chiamata per questo motivo energia oscura.
4.LA LEGGE DI NEWTON E LO SPAZIO DELLE FASI
La legge di Newton impone che, per la determinazione univoca di un
moto, si debbano conoscere le condizioni iniziali (cioè i due parametri
arbitrari da cui dipende l' integrale generale dell' eq. 2). In altri termini per
determinare univocamente il moto di un punto bisogna conoscerne ad un
r
r
determinato istante (ad es. al tempo t=0) la posizione r 0 e la velocità v 0 . Ciò
vuol dire che lo stato di moto di un punto materiale è univocamente
determinato quando siano note la sua posizione e la sua velocità in un dato
istante.
r r
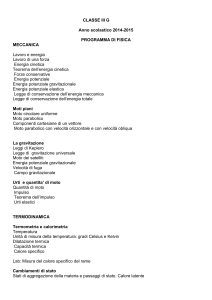
Si può allora costruire uno spazio astratto a 6 dimensioni (r , v ), detto spazio
delle fasi, in cui ogni "punto" (vettore Y) rappresenta lo stato del punto mobile in
funzione del tempo.
Y = (x, y, z ; vx , vy , vz)
a) Spazio delle fasi per il moto rettilineo uniforme ⏐ vx ⏐= K di un punto che
si muove in una scatola di semilato a.
40
Figure 2
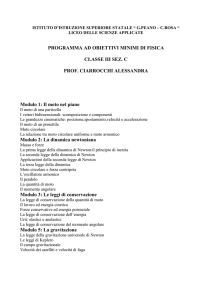
b) Spazio delle fasi per il moto uniformemente accelerato
Figure 3
⎧⎪x = 1 K t 2
2
⎨
⎪v = K t
⎩ x
vx = 2 K x
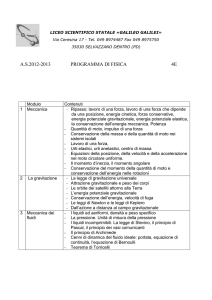
c) Spazio delle fasi per il moto armonico
Figure 4
41
⎧x = R cos(ω t )
⎨
⎩v x = − R ω sin(ω t )
v x = ± R ω 1 − cos2 (ω t )
vx = ±ω
R2 − x 2
v x2 = ω 2R 2 − ω 2 x2
v x2 + ω 2x 2 = ω 2 R2
equazione di un'ellisse con semiassi a , b:
a=R
b = ωR
5.TEOREMA DELL’IMPULSO
L'equazione fondamentale della dinamica può essere usata per ricavare
una importante legge che governa il moto dei corpi.
Si definisce la seguente grandezza fisica
r
6. IF (t ) =
t
∫
r
F (r,T)dT
(3.4)
0
che chiamiamo Impulso
della forza. Riferendoci alla fig.5 riscriviamo
r
l'impulso della forza F applicata al punto P di massa m tra l'istante t A e
l'istante t B , ricordando che l'equazione (3.1) può anche scriversi
r
r
d v (t )
F=m
dt
42
F ( P, t )
P, t
B, tB
v ( tA)
A, tA
fig.9
Figure 5
r
IF =
tB
∫(
r r
F P ,t dt
)
tA
tB
=m
∫
r
dv
dt
dt
tA
tB
=m
∫
r
dv
tA
r
r
= m v B − mv A
r
Definiamo la quantità di moto del corpo di massa m e velocità v
r
r
q=m v
che sostituita nella precedente equazione porta al Teorema dell'Impulso
r
r
r
r
7. IF = q B − q A = Δq
43
Si noti che l'impulso di una forza dipende soltanto dallo stato iniziale e da
quello finale . In figura è mostrato un esempio di forze impulsive. L’area
tratteggiata rappresenta l’impulso della forza.
Figure 6
Esempio :
Calcoliamo l'impulso di una forza costante , ad esempio della
m
forza peso P = mg dove g = 9.8 2 è l'accelerazione di gravità
s
Δt
I=
∫
mgdt = mg Δt
0
quindi
Δq = mg Δt
Δv
=g
Δt
ritroviamo cioè che il punto si muove con accelerazione g costante .
6.IL TERZO PRINCIPIO DELLA DINAMICA (AZIONE E
REAZIONE)
r
Se il corpo A applica una forza F B sul corpo B allora sul corpo A agisce
r
una forza di reazione F A uguale e contraria , quindi la forza risultante è nulla
r
r
r
F A + F B = 0.
È questo il caso ad esempio di due particelle che si urtano. Nell'ipotesi
che le forze agiscano per un tempo Δt durante l'urto , calcoliamo l'impulso
della forza risultante
44
Δt
∫ (F A + FB)dt = 0
r
r
0
cioè
Δt
∫
r
F A dt +
0
Δt
∫
r
r
F B dt = 0
0
ed introducendo gli impulsi delle forze si ottiene
r
r
r
IA + IB = 0 .
Applicando quindi il teorema dell'impulso
r
r
IA = Δq A
r
r
IB = Δq B
dove
r
r
r
Δ q A = m A v' A − m A v A
r
r
r
Δq B = m B v 'B − m B v B
essendo v' A,B e v A,B rispettivamente le velocità dei corpi A,B dopo e
prima dell'urto, si ottiene, sommando membro a membro, la seguente
formulazione del principio dell'azione e reazione applicato all'urto tra due
particelle
r
r
r
r
8. m A v ' A + m B v' B = m A v A + m B v B
che rappresenta il Teorema di Conservazione della Quantità di Moto
totale del sistema di particelle interagenti.
7.IL PRIMO PRINCIPIO DELLA DINAMICA (LEGGE D’INERZIA)
Se su di un corpo non agisce nessuna forza o se agisce un insieme di forze
la cui risultante è nulla, allora il corpo persiste nel suo stato di quiete ( se era
fermo ) o di moto rettilineo uniforme ( se era in moto ), rispetto a tutti i
sistemi di riferimento inerziali.
45
Questo enunciato asserisce essenzialmente che la legge di Newton è valida
nei sistemi di riferimento inerziali. Cioè le Forze Vere sono solo quelle che
appaiono nella legge di Newton riferita ai sistemi inerziali.
Questo principio è di fatto una definizione dei sistemi di riferimento
inerziali, cioè degli osservatori privilegiati rispetto ai quali nella legge di
Newton appaiono le forze vere che agiscono sul corpo.
Ma come definire operativamente i sistemi inerziali ? La relatività
galileiana asserisce che tutti gli osservatori in moto rettilineo uniforme tra loro
misurano su un punto in moto la stessa accelerazione e dunque la legge di
Newton è invariante cioè valida per tutti questi osservatori. Allora basterebbe
definire un solo osservatore inerziale per riconoscere tutti i sistemi di riferimento
inerziali.
Un buon sistema di riferimento inerziale per descrivere i fenomeni che
avvengono nell’ambito del sistema solare è costituito dalle stelle così dette fisse.
Per tale classe di fenomeni tutti gli osservatori fermi o in moto rettilineo
uniforme rispetto alle stelle fisse sono inerziali.
Ma se vogliamo ad esempio descrivere il moto delle stelle all’interno della
nostra galassia? In tal caso non possiamo più considerare fisse le stelle e
dunque dobbiamo cercare un altro riferimento inerziale.
Il trucco consiste nel cercare un osservatore molto lontano rispetto al
fenomeno di cui vogliamo studiare il moto. Nel caso delle stelle nella nostra
galassia possiamo assumere come osservatore inerziale il sistema delle
galassie lontane dalla nostra.
Ma se vogliamo descrivere il moto delle galassie nel nostro universo ?
Come si vede la scelta operativa dei sistemi di riferimento inerziali è in
qualche modo soggetta a delle approssimazioni.
8.CAMPI DI FORZE
r
Si definisce Campo di Forze un insieme di forze F definite in ogni punto P
di un determinato volume V dello spazio
r r
F = F(P ) ,
P ∈ V.
46
Z
V
F( r )
P
r
O
Y
X
fig.10
Figure 7
r
r F
Si definisce Intensità del Campo f =
nel punto P la forza che agisce su
m
una massa unitaria m collocata nel punto P.
Si definiscono Linee di Forza o Linee del Campo le curve nello spazio
dx dy dz
=
=
F x Fy Fz
oppure
⎧F x dy = F y dx
⎪
⎨F y dz = Fz dy
⎪⎩F dx = F dz
z
x
Esempio Le linee di forza di un campo uniforme sono rette
parallele alla
r
direzione del campo . Infatti scriviamo il campo uniforme F = (0,0,k ) diretto
come l'asse z.
47
Z
F = (o,o,k)
Y0
O
Y
X0
X
fig.11
Figure 8
Le equazioni delle linee del campo sono allora
⎧k dx = 0
⎨
⎩k dy = 0
ed integrando
⎧k (x − x0 )= 0
⎨
⎩k (y − y 0 ) = 0
cioè
⎧x = x 0
⎨
⎩y = y 0
dove x 0 e y 0 sono costanti di integrazione e z è arbitrario.
equazioni rappresentano tutte le rette parallele all'asse z .
Queste
9.L’ENERGIA POTENZIALE
r Riferendosi ad un sistema cartesiano si dice che un campo di forze
F (x,y,z ) ammette energia potenziale V se esiste la funzione scalare V(x,y,z)
tale che
48
⎧
∂V
Fx = −
⎪
∂x
⎪
∂V
9. ⎨F y = −
∂y
⎪
⎪F z = − ∂ V
∂z
⎩
Introducendo l'operatore scalare differenziale gradiente
r
∂ r ∂ r ∂ r
i+
j+
k
gr a d =
∂ x ∂y
∂z
possiamo scrivere
r
r
10. F = − gr a d (V )
Se il potenziale è regolare in modo che valga per esso il teorema di
inversione delle derivate parziali , allora dalla eq. (9) si deduce
⎧ ∂ Fx ∂ Fz
=
⎪ ∂z
∂x
⎪⎪ ∂ F
y
∂ Fx
11. ⎨
=
∂x
∂y
⎪
⎪ ∂ Fz = ∂ F y
⎪⎩ ∂ y
∂z
Introducendo l'operatore vettoriale differenziale rotore
r r ⎛ ∂ F z ∂ F y ⎞⎟ r ⎛⎜ ∂ F x ∂ F z ⎞ r ⎜⎛ ∂ F y ∂ F x ⎞⎟ r
i+
k
rot F = ⎜
−
−
−
j+
⎝ ∂z
∂z ⎠
∂x ⎠
∂y ⎠
⎝ ∂y
⎝ ∂x
r
si ha che un campo di forze F che ammette potenziale ed ha la regolarità
(11) è irrotazionale cioè
r
r r
12. r o t F = 0
()
()
10.IL LAVORO COMPIUTO DA UN CAMPO DI FORZE
r
Definiamo Lavoro infinitesimo dL compiuto da un campo di forze F per
r
spostare un punto materiale P di massa m di un tratto infinitesimo d s lungo
la traiettoria Γ (fig.12) il prodotto scalare r
r
dL = F ⋅ ds
13.
= Fx dx + Fy dy + Fz dz
Il lavoro totale per spostare P dal punto A al punto B lungo Γ è dunque
49
14. L Γ =
∫(
)
F xdx + Fy dy + F z dz .
Γ
Z
B
Γ
A
P
O
ds
Y
X
fig.12
Figure 9
Nota Bene : in generale il lavoro dipende dal cammino di integrazione Γ.
Se il campo è irrotazionale allora il lavoro non dipende più da Γ ma solo dai
punti iniziale A e finale B. Infatti l'eq.(11) che conduce all'eq.(12) è la
condizione necessaria e sufficiente affinchè l'espressione
F xdx + F y dy + F z dz = dU (x,y,z )
sia un differenziale esatto della funzione U(x,y,z)
dU =
∂U
∂U
∂U
dx +
dy +
dz
∂x
∂y
∂z
da cui si deduce che
⎧
∂U
Fx =
⎪
∂x
⎪
∂U
⎨F y =
∂y
⎪
⎪F = ∂ U
z
∂z
⎩
e dunque
V = −U
allora l'eq.(13) diventa
15. dL = − dV
50
Integrando si deduce la forma assai notevole
16. L = − (VB − VA )
valida per i campi irrotazionali. In particolare si deduce dall'eq.(16) che il
lavoro compiuto da un campo irrotazionale, lungo una qualsiasi linea chiusa,
è nullo
17.
∫
r r
F ⋅d s = 0
Si usa questa proprietà come definizione di campo conservativo.
Nota bene :
a) se esiste almeno una linea chiusa per la quale non valga l'eq.(17) allora il
campo non è conservativo
b) viceversa se il campo è conservativo allora il lavoro compiuto dalle
forze del campo dipende soltanto dalla posizione iniziale A e da quella finale
B (eq.(16)) e non dalla particolare traiettoria.
c) In ogni punto di un campo conservativo le linee di forza e le superfici
equipotenziali sono sempre tra loro perpendicolari. Infatti se lo spostamento
r
d s avviene su una superfice equipotenziale dU=0 ne deriva dall'eq.(15) che
dL=0 e dunque F ds cos(θ ) = 0 da cui cos (θ ) = 0 .
11.ESEMPIO DI FORZA CONSERVATIVA: LA FORZA
ELASTICA
Si definisce forza elastica la forza che causa il moto armonico:
F=-kx
Infatti l’equazione di Newton diventa:
m x’’ = -k x
2
che è l’equazione del moto armonico con pulsazione ω = k/m.
La circuitazione durante un periodo T=2π/ω diventa:
T
T
r r
T
k
kR 2 ⎡ 2 ⎛ 2 π ⎞⎤
C = ∫ F ⋅ dx = − ∫ kx dx = − x 2 = −
cos
t
⎜
⎟⎥
⎢
⎝ T ⎠⎦0
0
2 ⎣
2
0
[]
[
]
kR2
C =−
cos2 (2 π ) − cos2 0 = 0
2
Concludendo la forza elastica è una forza conservativa.
51
12.ESEMPIO DI FORZA DISSIPATIVA: ATTRITO
In generale la forza di attrito si manifesta tra due corpi solidi che strisciano
l’uno sull’altro o tra un corpo ed il fluido in cui il corpo si muova. È una forza
che si oppone al moto ed è proporzionale oltre che alla superficie di contatto
tra i due corpi anche alla velocità relativa.
r
r
F =−k v
Si dimostra che la circuitazione non è nulla.
Infatti per tale moto si calcola la velocità in funzione del tempo risolvendo
l’equazione di Newton.
−k v = mvÝ
vÝ k
=−
v
m
ln v = −
k
t+c
m
k
− t
e m
v = v0
essendo v0 la velocità al tempo t=0.
Calcoliamo ora la circuitazione:
r r
r
c = ∫ F ⋅ ds = −k ∫ v ⋅ ds
e moltiplicando e dividendo per dt
c = −k ∫0 v 2 dt
t
∫ e
t
c = −kv02 0
−
2k
t
m dt
2k
− t⎞
1 2⎛
⎜
c = − mv0 ⎜1− e m ⎟⎟ < 0
2
⎝
⎠
e tale integrale è sempre negativo e diverso da zero. Essendo la
circuitazione il lavoro compiuto dalle forze del campo, ne consegue che chi
compie lavoro è dunque il corpo che si muove per opporsi al campo di forza.
Questo lavoro viene compiuto a spese dell’energia cinetica del corpo ed è
dissipato in continuazione (in generale sotto forma di calore) nel senso che il
corpo non recupererà più tale energia. Dall’ultima formula si conclude che il
corpo dissipa in continuazione la sua energia cinetica che dunque varia nel
tempo secondo la legge:
2k
ΔT
= − Δt
T
m
infatti integrando tale equazione si ottiene:
−
2k
t
m
T = T0 e
che rappresenta l’energia cinetica rimanente dopo il tempo t.
52
13.TEOREMA DELL’ENERGIA CINETICA
Consideriamo il lavoro compiuto da un campo di forze durante uno
spostamento infinitesimo
r r
dL = F⋅ d s
r
r
dv
ricordando l'equazione di Newton F = m
dt
r
r ds
r r
dL = m d v ⋅ = m v ⋅d v
dt
r r 1 r r
1
ed essendo v ⋅d v = d (v ⋅ v ) = dv 2 si ottiene
2
2
⎛1
dL = d ⎝ mv 2 ⎞⎠
2
Se definiamo energia cinetica di un corpo di massa m e velocità v
18. E cin =
1
m v2
2
si ottiene in conclusione
19. dL = dE cin
Il lavoro elementare compiuto dalle forze di un campo che agiscono su un corpo è
pari alla variazione dell'energia cinetica subita dal corpo stesso.
14.TEOREMA DI CONSERVAZIONE DELL’ENERGIA TOTALE
MECCANICA
Consideriamo l'energia potenziale V di un corpo immerso in un campo di
forze conservative , possiamo allora riscrivere l'eq. (15) nella forma
20. d (L + V ) = 0
ed applicando il teorema dell'energia cinetica (19) si ha
(
)
21. d Ecin + V = 0
Definiamo Energia Totale Meccanica del corpo la somma dell'energia
cinetica e dell'energia potenziale
22. E tot = Ecin + V
si ottiene allora la notevole proprietà di Conservazione dell'energia Totale
Meccanica di un corpo in moto in un campo di forze conservative
53
23. E tot = costan te
Nota 1 : Se il campo di forze non è conservativo bisogna tenere conto
anche di un termine dissipativo additivo che è dovuto al lavoro compiuto
dalle forze non conservative (ad esempio l'energia dissipata per effetto delle
forze di attrito sotto forma di calore). In questo caso si ha
d (Etot − L diss )= 0
dove L diss è il lavoro compiuto dalle forze non conservative. Essendo il
lavoro una forma di energia si può anche enunciare la legge (23) nel seguente
modo
Il contenuto totale di energia in un processo isolato si conserva , cioè l'energia in
un processo isolato può soltanto trasformarsi da una forma ad un'altra senza essere
creata o distrutta.
Nota 2 : Di fatto l'energia cinetica è definita nel teorema dell'energia
cinetica come un indice di stato fisico , nel senso che tale teorema resta valido
anche se definiamo l'energia cinetica in modo più generale
E cin =
1
mv 2 + costan te
2
È evidente che assumere non nulla tale costante additiva equivale ad
assegnare una energia non nulla al corpo quando esso è in quiete. La teoria
della relatività ristretta assume questa costante pari a
2
m0 c
dove m 0 è la massa a riposo e c è la velocità della luce .
15.L’ENERGIA DI UN MOTO AD ACCELERAZIONE
COSTANTE.
Consideriamo la caduta di un grave, è questo un moto ad accelerazione
costante pari all’accelerazione di gravità g. Per tale moto l’equazione di
Newton diventa:
mg=mz’’
54
Figure 10
Se il grave si trova nel punto z = 0 al tempo t = 0 ed ha in tale istante
velocità nulla, allora esso tende a cadere lungo la direzione dell’asse z con
accelerazione costante z’’ = g, con velocità z’ = gt e con una posizione che
dipende quadraticamente dal tempo z = 1/2 g t2.
Essendo l’energia potenziale:
F = mg = −
dU
dz
si ricava
U = −mgz +U 0
essendo U0 l’energia potenziale nel punto iniziale z = 0.
l’energia cinetica del grave:
1
1
m z' 2= m g 2t 2 = m g z
2
2
L’energia totale è dunque costante, come ci si doveva aspettare
T=
Etot = T + U = U0.
55
Calcoliamo
Figure 11
In figura sono mostrati gli andamenti dell’energia potenziale U
(decrescente) e dell’energia cinetica T (crescente) in funzione della quota z.
16.L’ENERGIA DI UN MOTO ARMONICO
Il moto armonico è quello subito dal punto proiezione su un diametro del
moto circolare uniforme. L'equazione del moto armonico è dunque:
x = A cos(ω t + φ)
che è l'integrale della così detta equazione armonica o equazione
dell'oscillatore armonico:
2
24. Ý
xÝ+ ω x = 0 .
Questo moto è causato dalla forza elastica
F = −kx
Infatti l'equazione di Newton per questa forza diventa:
mÝ
xÝ= − k x
cioè
xÝÝ+
k
x=0
m
k
m
Da cui k = mω2. L'energia potenziale dell'oscillatore armonico è:
dU
k
F=−
, U = x2
dx
2
1
U = m ω2 x2
2
essendo ovviamente ω =
56
avendo assunto essere nulla l'energia potenziale per x=0, mentre l'energia
cinetica è:
2
1
1
1 ⎛ dx ⎞
T = m ⎜ ⎟ = m A 2 ω 2 sen 2 (ω t + ϕ) = m A 2 ω 2 1 − cos2 (ω t + ϕ ) =
2
2
2 ⎝ dt ⎠
[
]
⎡ ⎛ x ⎞ 2⎤
1
1
1
1
1
2 2
= m A ω ⎢1 − ⎜ ⎟ ⎥ = m A 2 ω 2 − m ω 2 x 2 = k A 2 − k x 2
2
2
2
2
2
⎣ ⎝ A⎠ ⎦
1
1
T = m ω 2 A2 − m ω 2 x 2
2
2
in conclusione l'energia totale è:
1
Etot = T +U = m ω 2 A 2
2
cioe'
Etot = π m ν 2 A 2
che si verifica essere ovviamente costante (per il teorema della conservazione
dell'energia totale). È interessante notare che l’energia totale di un oscillatore
armonico è proporzionale al quadrato della frequenza ν ed al quadrato
dell’ampiezza A.
Possiamo allora rappresentare graficamente l'andamento dell'energia cinetica
e dell'energia potenziale (fig. 12) in funzione di x.
E
Etot = 1/2 kA
2
T
U
-A
0
A
x
Figure 12
Si noti che l'energia potenziale è massima dove l'energia cinetica è minima e
viceversa.
57
17.L’ENERGIA DI UN CAMPO GRAVITAZIONALE
Calcoliamo l’energia potenziale del campo gravitazionale che agisce tra
due masse puntiformi M (supposta ferma) e m , poste ad una distanza r.
F = −G
dU = G
Mm
r2
Mm
r2
Mm
U = −G
r
=−
dU
dr
dr
Supponendo per semplicità che la velocità sia soltanto radiale si calcola
l’energia totale della massa m, che è costante.
e dunque:
1
Mm
E tot = m v 2 − G
2
r
v2 =
(costante)
2E tot 2GM
+
m
r
v
2GM
r0
v0
Etot=0
O
rmax
r0
r
Si presentano allora 2 casi:
Il primo caso per E tot < 0
Per descrivere il moto, consideriamo lo spazio delle fasi (r,v) come in figura.
Supponiamo per semplicità che la velocità iniziale sia positiva (v0 > 0) cioè la
massa m si muova inizialmente verso l’esterno del campo. La traiettoria nello
58
spazio delle fasi sarà allora del tipo mostrato in figura. La traiettoria è quella
disegnata in rosso, il punto si allontana inizialmente per raggiungere una
distanza massima rmax e poi ricade verso la massa M. È questo il caso di un
moto confinato. Si calcola la massima distanza:
rmax =
GMm
E tot
In generale vale il principio che il moto è confinato quando l’energia totale
è negativa.
Il secondo caso per E tot ≥ 0 .
v
v0
O
Etot=0
r0
rmax
r
v0
In tal caso le traiettorie nello spazio delle fasi sono mostrate nella figura, sia
per il caso di v0 ≥
2GM
2GM
, che per v0 ≤ −
. Se inizialmente la massa
r0
r0
m si allontana da M allora essa si allontanerà indefinitivamente. È questo il
caso di moto non confinato. Se invece m inizialmente si muove verso M,
allora essa cadrà sulla massa M.
59
18.CAMPI DI FORZA CENTRALI
Si definisce campo centrale o campo di forza centrale ogni campo di forza che
possiede le seguenti proprietà :
a) in ogni punto del campo la forza è diretta secondo una retta passante
per un punto fisso detto centro del campo,
b) il modulo f(r) della forza F in un punto del campo dipende soltanto
dalla distanza del punto dal centro del campo. Quindi su una qualsiasi
superficie sferica la forza è costante in modulo.
r
r
r
25. F = f(r )
r
F
r
Figure 13
Se f è positiva allora il campo è repulsivo, altrimenti è attrattivo.
Dimostriamo che un campo centrale è conservativo. Infatti
60
r r
r r
r ⋅d s
dL = F⋅d s = f(r )
r
r
r r
ed essendo dr = ⋅d s si ottiene
r
dL = f(r )dr
il campo ammette cioè energia potenziale U(r), essendo dL=-dU:
dU = − f (r) dr
e quindi è conservativo.
Le superfici equipotenziali di un campo centrale sono sfere con centro nel
centro del campo, infatti dU=0 implica dr = 0, dovendo in generale essere f≠0.
Ma il luogo dei punti in cui non varia r è una sfera:
r = cos tan te
Come conseguenza le linee di forza sono rette uscenti dal centro del
campo dovendo essere perpendicolari
r alle superfici equipotenziali.
Definiamo Momento della forza F rispetto al centro del campo il seguente
prodotto vettoriale
r r r
26. M = r × F
se il campo di forza è centrale si ha
r r r
r
r×r
=0
27. M = f (r )
r
e dunque il momento di un campo centrale rispetto al suo centro è sempre
nullo.
Definiamo Momento Angolare oppure Momento della Quantità di Moto di un
r
corpo di massa m e velocità v il seguente prodotto vettoriale:
r r
r
28. L = r × m v
derivando il momento angolare rispetto al tempo si ottiene
r
dL r
r r
r
= v × mv+ r × ma
dt
il primo prodotto vettore del secondo membro è nullo e dunque
r
r
dL
29.
=M
dt
Tale equazione è valida in generale per tutti i campi in un sistema di
riferimento inerziale (abbiamo usato l’equazione di Newton). In particolare
per i campi centrali diventa
r
r
L = c ost
61
che rappresenta il Teorema di Conservazione del Momento Angolare per il
r r
moto nei campi di forze centrali.
Inoltre poichè per definizione r e v sono
r
sempre perpendicolari a L ne consegue che il moto avviene in un piano
perpendicolare al momento angolare e passante per il centro del campo (moto
z
α e’ il piano
L
definito da r e
da v
v
r
y
o
α
x
Figure 14
piano).
19.PATTINATORE SUL GHIACCIO E MOMENTO ANGOLARE
Consideriamo un pattinatore P che ruota attorno al suo asse verticale con
velocità di rotazione v, che risulta perpendicolare al vettore r. Sia PB il suo
braccio di estensione r e sia m una massa tenuta nella sua mano. La forza che
trattiene la massa m ad una distanza r dall’asse di rotazione è di tipo centrale.
Dunque si conserva il momento angolare L rispetto all’asse di rotazione.
v
P
r
L=mrv=costante
Da cui si ricava
62
B
v=L/mr.
Cioè la velocità di rotazione è inversamente proporzionale all’estensione r
del braccio. Quindi per aumentare la velocità di rotazione il pattinatore deve
diminuire l’estensione del suo braccio e viceversa.
20.IL GIROSCOPIO
Il giroscopio è un attrezzo costituito da una ruota, che gira rapidamente
attorno al suo asse, alla quale è consentito disporsi in una qualsiasi giacitura
nello spazio. Il momento angolare è diretto come il suo asse di rotazione e si
conserva, cioè non cambia fintanto che dura la rotazione.
Se dunque si sposta l’asse di rotazione in una direzione diversa da quella
di partenza, la ruota tende a ritornare nella giacitura originale.
Le applicazioni sono molteplici soprattutto nel campo della navigazione.
21.I CAMPI CENTRALI DI FORZA ELASTICA
Il più generale campo di forza elastica centrale si può scrivere
r
r
30. F = − k r
r
dove r è il vettore posizione rispetto al centro del campo e k è una
costante positiva. Proiettando l'eq (30) sugli assi cartesiani ed applicando
l'equazione fondamentale della dinamica si ottiene
⎧m x" = − k x
⎪
31. ⎨m y" = − k y
⎪m z" = − k z
⎩
63
che è un sistema di tre equazioni differenziali lineari a coefficienti costanti
del second'ordine . Equazioni di questo tipo si chiamano armoniche.
r
L'integrale generale fornisce la posizione r (x, y, z ) come funzione oscillante
del tempo
⎧x = A x cos(ω t + φ x )
⎪
32. ⎨y = A y cos ω t + φ y
⎪
⎩z = A z cos(ω t + φ z )
(
)
k
è la pulsazione, A x,y,z sono le ampiezze del moto oscillante
m
rispetto agli assi cartesiani, φ x,y,z sono le costanti di fase e (ω t + φ ) è detta la
dove ω =
fase del moto.
Calcoliamo ora l'equazione del piano sul quale avviene il moto. Abbiamo
dimostrato che le equazioni (32) descrivonor un moto che si sviluppa su un
rispetto al centro del
piano che è normale al momento angolare L calcolato
r
r L
campo. Per comodità introduciamo il vettore l ≡
che ha la stessa direzione
m
del momento angolare e per la definizione di prodotto vettore si ha
⎧l x = yz' − zy'
⎪
⎨l y = zx' − xz'
⎪⎩l = xy' − yx'
z
Derivando le equazioni (32) rispetto al tempo si ottiene
⎧x' = − ω A xsen (ω t + φ x )
⎪
⎨y' = − ω A y sen ω t + φ y
⎪
⎩z' = − ω Az sen (ω t + φ z )
(
)
che sostituite nelle precedenti danno
(
)
(
⎧l x = − ω A z A y cos ω t + φ y sen (ω t + φ z )+
⎪
⎪ ω A z A y cos(ω t + φ z )sen ω t + φ y
⎪⎪l = − ω A A cos ω t + φ sen ω t + φ +
y
x
(
z
z
)
)
(
x
)
⎨
⎪ ω A x A z cos(ω t + φ x )sen (ω t + φ z )
⎪l z = − ω A x A y cos(ω t + φ x )sen ω t + φ y +
⎪
⎪⎩ ω A x A y cos ω t + φ y sen (ω t + φ x )
(
(
cioè
64
)
)
(
)
(
)
⎧l = ω A A sen φ − φ
x
y z
y
z
⎪
33. ⎨l y = ω Az A x sen (φ z − φ x )
⎪
⎩l z = ω A x A y sen φ x − φ y
Si noti che il momento angolare è ovviamente costante cioè rnon dipende
r
dal tempo. Essendo dunque sempre r perpendicolare a l si deduce
l'equazione del piano su cui avviene il moto (condizione di perpendicolarità)
r r
34. r ⋅ l = xlx + yly + zl x = 0
Vogliamo ora calcolare l'equazione della traiettoria. Scegliamo una
qualsiasi coppia di assi cartesiani (θ , η) sul piano del moto definito
dall'equazione (34). Proiettando le equazioni (31) su questi due nuovi assi
otteniamo
⎧θ "+ ω 2 θ = 0
⎨
2
⎩ η"+ ω η = 0
i cui integrali generali sono
⎧θ = H cos(ω t + ψ θ )
⎨
⎩ η = K cos ω t + ψ η
(
)
Si noti che il caso in cui le costanti di fase sono uguali ψ θ = ψ η è un caso
degenere nel senso che il moto si riduce ad una oscillazione su di una retta
K
con coefficiente angolare pari a
.
H
⎧ θ = cos(ω t )cos ψ − sen (ω t )sen ψ
θ
θ
⎪H
35. ⎨
η
⎪ = cos(ω t )cos ψ η − sen (ω t )sen ψ η
⎩K
moltiplicando le due equazioni rispettivamente per cos ψ η e cos ψ θ e
sottraendo membro a membro si ottiene
θ
36. H
cos ψ η −
η
K
[
cos ψ θ = sen ω t −sen ψ θ cos ψ η + sen ψ η cos ψ θ
(
= sen ω t sen ψ η − ψ θ
)
e moltiplicando le equazioni (35) rispettivamente per sen ψ η e
sen ψ θ e sottraendo membro a membro si ottiene
θ
η
sen ψ η − sen ψ θ = cos ω t sen (ψ η − ψ θ )
H
K
infine quadrando e sommando le equazioni (36) e (37) si ha
37.
65
]
38.
(
)
cos ψ η − ψ θ
1 2 1 2
θ
+
η
−
2
θη = sen 2 ψ η − ψ θ
2
2
H
K
HK
(
)
che è l'equazione di una conica. Data l'equazione generale di una conica
a 11x 2 + 2a 12xy + a 22 y 2 + 2a 13x + 2a 23 y + a 33 = 0
dal valore assunto dal discriminante:
Δ ≡ a 11a 22 − a 122
si presentano i seguenti casi
a) Δ > 0 la conica è un ellisse
b) Δ = 0 la conica è una parabola
c) Δ < 0 la conica è un'iperbole
e dall'equazione (3.34) si ottiene
Δ=
[
(
1
2
2 1− cos ψ η − ψ θ
H K
2
)]> 0.
Si noti che Δ = 0 solo nel caso degenere ψ η = ψ θ , che corrisponde, come
abbiamo già visto, ad una oscillazione lungo una retta. In conclusione
Le forze elastiche centrali causano un moto piano la cui traiettoria è una ellisse
oppure provocano nel caso degenere, un moto oscillante lungo una retta.
π
Nota : se le condizioni iniziali sono tali per cui H=K e ψ η − ψ θ =
allora
2
l'ellisse si riduce ad una circonferenza di raggio H.
22.IL CAMPO DI FORZA GRAVITAZIONALE
Ogni corpo di massa m è sorgente di un campo di forza che agisce su ogni
altro corpo di massa m' secondo la legge della gravitazione universale:
r
r
m m' r
39. F = k 2
r r
Si noti che m ed m' si chiamano masse gravitazionali che a priori sono
diverse dalle masse inerziali fino a qui studiate. Se ne dimostra l'equivalenza
attraverso misure sperimentali. La costante k = 6.66 ⋅10 −8 cm 3 s −1gr −1 non
dipende nè dal mezzo in cui sono immersi i corpi , nè dalla natura chimica o
fisica dei corpi stessi. Si noti ancora che il campo gravitazionale è un campo
centrale e dunque è conservativo.
Consideriamo per semplicità il caso monodimensionale di una massa m
che attrae una massa m' con una forza
F=k
dV
m m'
2 =−
dr
r
da cui si ricava l'energia potenziale gravitazionale della massa m'
66
V = −k
m m'
r
23.IL TEOREMA DI GAUSS
Una massa m sia collocata nel punto N e ad una distanza r sia posta una
r
massa m' su una superficie infinitesima con areola dΣ e versore normale n ,
r
che forma un angolo α con la direzione di r .
n
α
P
m'
r
dΣ
F
dΩ
N m
Figure 15
Ricordiamo che la superficie dΣ sottende dal punto N un angolo solido dΩ
dΩ =
d Σcos(α )
r2
essendo dΣ cos(α) l'areola proiettata sul piano perpendicolare alla
r
direzione r . Sulla massa m’ agirà allora una forza gravitazionale:
r
r
m m' r
F = −G 2
r r
r
Definiamo il flusso infinitesimo dΦ del campo F attraverso la superficie
dΣ nel seguente modo
67
r r
dΦ = F ⋅ n dΣ = F cos(π − α )d Σ
quindi si ottiene
dΦ = G
m m' dΩ
cos(π − α ) = −G m m' dΩ
r 2 cos α
da cui
Φ = - G m m' ∫ dΩ
r
Calcoliamo ora il flusso totale di F attraverso una superficie chiusa Σ:
⎧−4 πGmm' N interno a Σ
⎪
Φ = ⎨−2 πGmm' N su Σ
⎪0
N esterno a Σ
⎩
che rappresenta il teorema di Gauss.
Integrando su una superficie chiusa Σ
¾essendo 4π l’angolo solido con cui la
N
massa m vede la superficie chiusa Σ che la
circonda (N interno a Σ),
Σ
¾essendo 2π l’angolo con cui la massa m
vede la superficie chiusa Σ quando e’ posta
su di essa (N posto su Σ),
N
¾essendo uguali gli angoli solidi con cui
la massa m vede Σ’ e Σ’’, il flusso
attraverso Σ’ e’uguale e contrario al flusso
attraverso Σ’’ (N esterno a Σ).
⎧−4πGmm' N interno aΣ
⎪
Φ = ⎨−2πGmm' N su Σ
⎪0
N esterno aΣ
⎩
Teorema di Gauss
68
Σ
N
Σ’
Σ’’
R
M
Σ
r
m
Figure 16
24.IL CAMPO GRAVITAZIONALE ALL’INTERNO DI UNA
MASSA SFERICA UNIFORME
Estendendo il teorema di Gauss ad una distribuzione continua sferica di
massa M su di un volume V=4/3 π R3, possiamo dire che il flusso del campo
gravitazionale attraverso una superficie sferica Σ di raggio r su cui è posta la
massa m’ (ad una distanza r < R dal centro di M) indotto dalla massa esterna
alla superficie Σ è nullo. Dunque resta soltanto il contributo del flusso indotto
attraverso Σ soltanto dalla massa Mr = ρ Vr = 4/3 π ρ r3 (essendo ρ la densità),
contenuta all’interno di Σ.
Dunque per il teorema di Gauss:
2
r
4 π ) G ρ m' 3
(
Φ Σ F = − 4 π G m' M r = −
r
3
ma per definizione di flusso deve essere:
()
69
r
r r
Φ Σ F = ∫ F ⋅ n dΣ = ∫ F (r ) dΣ
()
Σ
dove F(r) e' la componente radiale del campo,
ed essendo
Σ = π r2
si ha
dΣ = 2 π r dr
e quindi
r
Φ Σ F = 2 π ∫ F (r ) r dr.
()
In conclusione si deve avere :
2 π ∫ F (r ) r dr = −
(4 π )2 G ρ m' r 3
3
8 π G ρ m' 3
r
∫ F (r )r dr = −
3
ma ricordando che
df (r )
dr = f (r )
dr
in conclusione deve essere
F = − 8π G ρ m' r
F = −cost ⋅ r
∫
che è una forza di tipo elastico.
In conclusione una massa m’ posta nel campo gravitazionale all’interno di
una distribuzione sferica omogenea di densità ρ si muove di moto armonico.
25.IL CAMPO DI FORZA GRAVITAZIONALE GENERATO DA
UNA MASSA SFERICA UNIFORME
La forza F generata da una distribuzione uniforme di massa M contenuta in
una sfera di raggio R, che agisce su una massa m posta ad una distanza r dal
centro della sfera è dunque:
mM
⎧
−
G
, r ≥ R forza gravitazionale
⎪
r2
F=⎨
⎪− G mM r , r < R forza elastica
⎩⎪
R3
Possiamo dunque rappresentare graficamente l'accelerazione di gravità
g = |F| / m
in funzione della distanza dal centro della sfera omogenea nella seguente
figura.
70
Figure 17
Nota 1: La massa m si muove all'interno della sfera (r<R) di moto oscillante
con pulsazione
GM
ω=
R3
cioè con periodo
4
2π V
dove V = π R 3
τ=
3
GM
Nel caso della terra si ha:
⎛ m3 ⎞
G = 6.65 ⋅10 −11 ⎜
⎟
⎝ Kg ⋅sec ⎠
M = 5.98 ⋅10
24
(Kg )
R = 6.4 ⋅10
(m )
si ottiene quindi un periodo pari a
τ ≈ 30 minuti
6
Introducendo la densità
ρ=
M
V
si ottiene la legge
3π
costan te
G
Si può calcolare l'energia potenziale associata, avendo imposto la continuità
nel punto r = R:
ρ⋅ τ =
⎧ GmM 1
⎪− 2 r
U =⎨
⎪− GmM 2R 2 − r 2
⎩ 2R 3
[
, r≥R
]
, r<R
71
che si può rappresentare graficamente nella fig. 19 seguente
Figure 18
26.LA FORZA DI GRAVITÀ TERRESTRE
Nelle vicinanze della terra il campo di gravità è sempre diretto verso il
centro (ammessa l'uniformità della massa terrestre ). Il vettore intensità del
campo che ha le dimensioni di una accelerazione si chiama accelerazione di
gravità
r
r P
g=
m
r
dove P è la forza di gravità ( peso) cui è sottoposta una qualsiasi massa m
72
g3
g2
g1
fig.13a
Figure 19
e dipende generalmente dalla posizione ( diminuisce allontanadosi dalla
superfice terrestre perchè aumenta la distanza e diminuisce avvicinandosi al
centro della terra perchè diminuisce la massa attrattiva tra il corpo ed il centro
della terra fig.20) .
Se ci si pone al livello del mare si può dire che
l'accelerazione di gravità è sostanzialmente costante.
Per effetto della rotazione della terra attorno al suo asse passante per i
poli, in qualsiasi punto della superficie terrestre agisce anche una
accelerazione centrifuga gc = ωRp2 diretta perpendicolarmente all'asse di
rotazione come mostrato dalla figura seguente (ω è la velocità angolare di
rotazione della terra).
N
Rp
P
gc
g
O
S
fig.12 h
Figure 20
73
gR
L'accelerazione risultante gR non è più diretta verso il centro della terra.
L'entità di questo effetto è piccola, alcuni valori dell'accelerazione di gravità
sono qui di seguito mostrati.
g equatore
g o
45 latitudine
g polo
cm
s2
cm
= 980.6 2
s
cm
= 983.2 2
s
= 978.0
Nota 0 : La massima intensità del campo si ha sulla superficie esterna della
distribuzione di massa.
Nota 1 : Si noti che la forza di attrazione per un punto che si muova all'
interno della Terra in un tunnel come in fig. è del tipo:
F int ≈ − R [forza elastica ]
Si determina una oscillazione armonica intorno al centro della Terra.
Nota 1.1 : è interessante osservare che il moto armonico è definibile come
quel moto indotto dal campo generato da una distribuzione uniforme di carica
in un volume sferico, che agisce su una carica puntiforme collocata all' interno
della distribuzione di carica, quando e soltanto quando la distribuzione di
carica genera un campo centrale (all' esterno della sfera) che vada come R −2
Nota 2 : è interessante notare come un campo di forze tridimensionale
centrale, che va come R −2 , generato non da una sorgente puntiforme, ma da
una sorgente uniformemente diffusa su di un raggio r si comporti (per tutti i
punti che distano dal suo centro R, con R < r ) come un campo di forza elastica
(moto armonico). Questa interessante simmetria suggerisce molte cose, tra le
quali, ad es., come generare un campo centrale che vada come R −2 partendo
dall' oscillatore armonico. In tal caso è però cruciale trovare che cosa è che
oscilla armonicamente per generare un tale campo.
Nota 3 : Poichè come abbiamo già visto le soluzioni del moto armonico
indotto dalle forze centrali elastiche sono soltanto " moti confinati" (ellissi), la
presenza di strutture confinate ( cioè limitate nello spazio) quali gli atomi, i
sistemi stellari, le galassie, i clusters di galassie, sarebbe una conseguenza
derivante dalla dipendenza da R −2 delle forze fondamentali.
27.IL PENDOLO SEMPLICE (LE PICCOLE OSCILLAZIONI)
Consideriamo una massa puntiforme m posta nel punto terminale A di un
filo inestensibile ed incomprimibile di lunghezza l vincolato nel punto O
(fig.22).
74
O
θ
l
A
s
PL
PT
θ
P
fig.14
Figure 21
r
Sia P il suo peso che è diretto sempre verso il basso
P = mg
allora la massa è libera di muoversi lungo un arco di circonferenza con
centro in O. Consideriamo la componente tangenziale della forza peso
rispetto alla traiettoria circolare
P T = − mg sen θ
dove il segno negativo è dovuto al fatto che P T agisce nel nenso degli
s
⎛
angoli θ decrescenti. Nell'ipotesi delle piccole oscillazioni ⎝ θ = << 1⎞⎠ si ha
l
P T = − mg θ = − mg
s
l
essendo s il tratto di circonferenza percorso idurante l'oscillazione.
Applicando l'equazione fondamentale della dinamica si ottiene
P T = ms "
cioè
g
s"+ s = 0
l
che è un'equazione armonica, con pulsazione ω =
τ=
2π
ω
= 2π
l
, il cui integrale fornisce l'equazione del moto
g
s = s 0 cos(ω t + φ ).
75
g
l
e periodo
Si può concludere che le piccole oscillazioni sono isocrone.
28.IL PROBLEMA DI KEPLERO
Studiamo i campi di forza centrali nei quali l'energia potenziale è
inversamente proporzionale alla distanza dal centro r
V(r ) = −
α
r
e dunque nei quali la forza è inversamente proporzionale a r 2 . In tali
condizioni sappiamo che il moto avviene su di un piano (fig.15)
Z
vr
φ
v
r
v
φ
Y
O
fig.15
Figure 22
calcoliamo dunque l'energia cinetica E c di una massa m sottoposta
ad un tale campo
r
r
1 r
F=k 2
r r
r
Scomponendo la velocità v nelle componenti v r radiale e v φ trasversale
v r = r'
v φ = r φ'
da cui
Ec =
(
)
(
)
1
1
1
mv 2 = m v r 2 + v φ 2 = m r' 2 +v φ 2 .
2
2
2
L'energia totale è dunque
76
E = E c + V (r ) =
(
)
1
m r' 2 +v φ 2 + V (r ).
2
Calcoliamo il momento angolare rispetto al centro del campo
r
r r
M =m r ×v
che sappiamo essere costante nel tempo ed è ovviamente perpendicolare
al piano del moto, cioè diretto come l'asse z. Il suo modulo è
M = M z = mrv sen φ = mrv
φ
= costan te
da cui ricaviamo
vφ =
M
mr
che sostituito nell'espressione dell'energia totale da
E=
1
M2
mr' 2 +
+ V(r )
2
2mr 2
Questa equazione mostra che la parte radiale del moto , quella cioè che
dipende soltanto dalla distanza r si può considerare come un moto lineare
(dipendente cioè soltanto dalla posizione e non dalla direzione ) pur di
interpretare il campo come un campo dotato di energia potenziale efficace
40. V eff = V (r ) +
M2
M2
α
=
−
+
2mr 2
r 2mr 2
Infatti in tal caso l'energia totale si esprime nella solita forma
E = E c (r ) + V eff (r )
dove E c =
1
mr ' 2 .
2
Si noti ancora che il termine
M2
è detto Energia
2mr 2
Centrifuga.
In conclusione il moto di un corpo di massa m in un campo di forze centrali che
1
và come 2 ( ad esempio le forze gravitazionali oppure quelle elettriche di Coulomb),
r
si può considerare come un moto lineare ( che dipende cioè da una sola variabile : la
distanza dal centro del campo) di una massa m con energia potenziale definita
dall'eq.(40) il cui andamento è mostrato nella fig.24.
77
Ue f f
r0
O
r
α2 m
2 M2
fig.16
Figure 23
Si noti ancora che
r0 =
M2
mα
rappresenta la distanza dall'origine del campo alla quale cambia il segno
della derivata dell'energia potenziale e dunque cambia il senso della direzione
della forza del campo. Dunque
il campo è attrattivo per r > r 0
il campo è repulsivo per r < r 0
ed è importante osservare che la presenza dell'energia centrifuga rende il
campo repulsivo alle piccole distanze.
29.IL TEOREMA DEL VIRIALE PER LA PARTICELLA SINGOLA
Definiamo la seguente grandezza scalare
r r
A = r ⋅ mv
derivando rispetto al tempo si ottiene
r
r
r dr
dv r
dA
=m
⋅ r + mv ⋅
dt
dt
dt
r r
= F ⋅ r + mv 2
cioè
41.
dA r r
= F ⋅ r + 2E c
dt
Osservando il punto materiale nel suo moto durante un certo intervallo di
tempo τ , possiamo calcolare il valore medio dell'equazione (41) utilizzando
il teorema della media per una grandezza f (t )
78
τ
1
<f>=
τ
∫ ()
f t dt
0
per τ sufficientemente grande, ottenendo
<
r r
dA
> = < F ⋅ r > + 2 < Ec >
dt
τ
1
τ
∫
r r
dA
dt = < F ⋅ r > + 2 < E c >
dt
0
e integrando
42.
Aτ − A0
r r
= < F ⋅ r > + 2 < Ec >
τ
Imponiamo la condizione che il primo membro dell'equazione (42) sia
limitato , cioè
a) la posizione e la velocità della particella sono limitate (caso della particella
confinata in un volume chiuso)
oppure
b) la posizione non è limitata (moto non confinato) , ma deve comunque
essere
r r
lim v ⋅ r = k (finito )
r→∞
cioè
k
r > >1 r
v ≈
In una di queste ipotesi , pur di assumere l'intervallo di tempo τ
sufficientemente grande si ha
Aτ − A0
τ
≈0
e dunque
43. < Ec > = −
1 r r
<F⋅r >
2
che rappresenta il Teorema
del Viriale per la particella singola.
r
Se il campo di forza F ammette energia potenziale V e considerando per
semplicità il caso monodimensionale riscriviamo l'eq.(43)
< Ec > = −
1
dV
<x
>
2
dx
ed assumendo l'energia potenziale
V≡
79
K
xn
dove n si chiama indice di campo , poichè
K
dV
V
= − n n +1 = n
x
dx
x
si ottiene in conclusione
44. < Ec > =
n
<V >
2
In tal caso l'energia cinetica media è proporzionale all'energia potenziale
media .
80
30.OLTRE L’UNIVERSO MECCANICO DI NEWTON
Così come la meccanica newtoniana è nata dallo studio del campo
gravitazionale che governa il moto dei pianeti, anche la meccanica quantistica
si è sviluppata essenzialmente dallo studio del campo elettrico che lega due
cariche elettriche: il protone e l’elettrone presenti nell’atomo. La meccanica
newtoniana è dunque valida per i fenomeni macroscopici e, dagli ultimi
esperimenti di astrofisica effettuati sui satelliti, si estende a tutto l’Universo
che sembra essere euclideo cioè piatto ed aperto. La meccanica quantistica
invece è valida a livello microscopico e descrive in particolare il mondo delle
molecole, degli atomi e delle particelle elementari. Sempre dalle più recenti
misure di astrofisica risulta che soltanto il 5 % dell’Universo sarebbe
composto di materia “barionica”, cioè di materia come noi la intendiamo,
mentre ciò che rimane dovrebbe essere ancora da scoprire. Lo studio dei
fenomeni elettromagnetici trascende gli scopi di questi appunti, ma è tuttavia
possibile comprenderne a grandi linee gli aspetti dinamici quantistici anche
senza una conoscenza specialistica dell’elettromagnetismo.
Nel 1800 ha avuto un grande sviluppo lo studio dell’emissione e
dell’assorbimento della luce da parte degli atomi. Lo strumento principale di
misura era lo spettroscopio ottico. Con un prisma di vetro la luce veniva
separata (rifrazione) nelle sue componenti di vario colore, cioè di varia
lunghezza d’onda (energia). Studiando in tal modo la luce solare J. von
Fraunhofer osservò il seguente spettro di fig. 25,
Figure 24
in cui si distinguono delle righe: luminose (emissione degli atomi del sole)
e scure (assorbimento da parte degli atomi dell’atmosfera terrestre).
Lo spettro di luce mostra la variazione d’intensità della radiazione alle
differenti lunghezze d’onda (colori). Oggetti con temperature e composizione
differenti mostrano spettri diversi. Attraverso l’osservazione dello spettro di
una stella gli astronomi sono dunque in grado di determinarne la
temperatura, la composizione e le condizioni fisiche.
Valgono le seguenti leggi di Kirchhoff:
• un solido, un liquido o un gas ad alta pressione producono uno spettro
luminoso continuo.
81
•
•
•
Un gas ad alta temperatura e a bassa pressione produce uno spettro
discreto di emissione (linee luminose).
Quando un gas freddo a grande pressione si interpone tra una sorgente
con spettro continuo e l’osservatore, allora si producono nello spettro
osservato delle linee discrete nere di assorbimento.
La lunghezza d’onda delle linee discrete di emissione o di
assorbimento dipende dal tipo di molecole che le producono.
Figure 25
La serie di Balmer.
In questo campo il maggior contributo dato da Balmer risente
maggiormente del suo “fiuto” matematico che del suo senso fisico. Infatti egli
trovò una formula matematica che riproduceva la serie di linee spettrali
prodotte dall’idrogeno, senza fornirne una spiegazione fisica.
82
La famosa formula di Balmer è:
λm,n = hm2/(m2-n2).
Mettendo n = 2 e h = 3654.6 10-8 cm, le lunghezze d’onda della formula che si
ottengono ponendo m = 3, 4, 5, 6 riproducevano i dati sperimentali con
notevole precisione. A dimostrazione che una buona teoria è in grado non
solo di spiegare i dati sperimentali, ma è anche in grado di prevedere cose
non ancora misurate, la formula di Balmer prevedeva una linea anche per
m=7. Poco tempo dopo, un suo collega dell’Università di Basilea confermò
sperimentalmente l’esistenza di tale linea.
Nessuno però era in grado di spiegare il perché tale formula, si doveva
aspettare l’intuito di Niels Bohr nel 1913.
Più tardi nel 1890 Rydberg formulò una generalizzazione della formula di
Balmer per l’atomo d’idrogeno:
1/L = RH (1/n2 - 1/m2)
dove RH = 10972160 m-1 è una costante che prese il suo nome.
Non c’era all’epoca alcuna spiegazione fisica di queste formule.
L’osservazione principale consiste nel fatto che assieme alla presenza di
uno spettro continuo esiste uno spettro discreto. Ciò dimostra che i processi
microscopici di emissione e di assorbimento delle onde elettromagnetiche da
parte degli atomi avvengono per quantità discrete di energia.
Poichè negli atomi i responsabili di questi scambi di energia con l’esterno
sono gli elettroni, ne consegue che gli elettroni stessi devono avere stati
dinamici discreti nel loro moto attorno ai nuclei. La dinamica di Newton non
sapeva prevedere nulla del genere e dunque si doveva cercare una nuova
dinamica valida per tali processi microscopici.
La nuova dinamica è descritta dalla teoria quantistica.
83
Figure 26
In figura 28 è mostrata la serie di Balmer dell’atomo idrogenoide.
L’atomo idrogenoide.
Il primo e più importante passo è stato fatto da N.Bohr nel 1913 . Egli infatti
per spiegare la cratteristica discreta dello spettro della luce emessa o assorbita
dagli atomi, ipotizzò che, per i fenomeni atomici, le energie possibili per gli
elettroni legati al nucleo fossero discrete e dunque che le orbite possibili per
gli elettroni attorno al nucleo fossero “quantizzate”, vale a dire che solo
alcune orbite erano permesse e non altre. Era questo l’inizio della meccanica
quantistica, che poi si sviluppò al punto da descrivere completamente i
fenomeni atomici.
84
Figure 27
In figura 27 è mostrato schematicamente il meccanismo dell’assorbimento e
dell’emissione di fotoni (particelle della radiazione elettromagnetica) da parte
di un atomo. Gli elettroni possono saltare da un’orbita all’altra emettendo o
assorbendo energia. I quanti di energia (fotoni) devono corrispondere alle
linee dello spettro della luce.
Il modello di Bohr
Nel 1913 N.Bohr, nel tentativo di spiegare lo spettro discreto della luce
emessa e assorbita dagli atomi di idrogeno, mise a punto un modello
dell’atomo (atomo idrogenoide) che prevedeva gli elettroni (cariche elettriche
negative) “ruotanti” attorno ad un nucleo (solo protoni con carica elettrica
positiva, perché i neutroni sarebbero stati scoperti soltanto nel 1932 da
Chadwick) per effetto della forza elettrostatica di Coulomb. De Broglie aveva
appena ipotizzato che le particelle, quali gli elettroni, potevano essere
considerate non solo corpuscoli, ma anche “onde di materia”. In tale schema
le orbite potevano essere stabili soltanto se la lunghezza della circonferenza
era un multiplo intero della lunghezza d’onda associata all’elettrone (ipotesi
di onda stazionaria). La sorprendente conseguenza era che solo certi valori
discreti del raggio della traiettoria erano compatibili con un’onda stazionaria.
Si era trovato dunque il meccanismo teorico che spiegava la discretizzazione
misurata nelle linee spettrali di emissione e di assorbimento. Naturalmente si
era trovato il limite di validità della meccanica classica di Newton. Sorgeva
inoltre un altro problema: secondo l’elettrodinamica classica una carica, che si
muove lungo una traiettoria curva, avrebbe dovuto perdere energia sotto
forma d’irraggiamento (luce di sincrotrone). L’elettrone quindi doveva
muoversi attorno al nucleo atomico lungo una spirale di raggio decrescente
fino a “cadere” rapidamente sul nucleo. Il modello di Bohr superava questo
problema, perché nella nuova teoria l’elettrone raggiunge uno stato stabile
quando si allinea su una traiettoria con il giusto raggio permesso dalla sua
lunghezza d’onda di De Broglie. Però, un elettrone che non sia nello stato più
basso (stato fondamentale con n=1) può spontaneamente compiere una
85
transizione verso uno stato di più bassa energia e simultaneamente perdere
tanta energia, quanto è la differenza tra i due livelli, sotto forma di radiazione
elettromagnetica (particelle di luce, cioè fotoni). Il calcolo delle lunghezze
d’onda di tali fotoni dava esattamente conto della formula di BalmerRydberg. Il modello di Bohr si era ispirato anche all’idea di “quantizzazione”
discreta dell’energia formulata da M.Planck.
Fu questa una rivoluzione altrettanto importante della rivoluzione
Newtoniana per i moti nel campo gravitazionale. Dalla grande scala (sistema
planetario) si era passati alla piccola scala (sistema atomico).
Descrizione ondulatoria.
Un passo importante per la meccanica quantistica fu dunque fatto da De
Broglie, che ha, nella sua tesi di laurea, aveva ipotizzato l’associazione di una
lunghezza d’onda all’elettrone orbitante attorno al nucleo (onde di materia).
La traiettoria dell’elettrone, per non avere effetti d’interferenza che avrebbero
compromesso la stabilità dell’orbita, doveva essere un multiplo intero di tale
lunghezza d’onda. Tale lunghezza d’onda λ dipendeva dall’energia
dell’elettrone, come aveva ipotizzato Plank:
hc
E= .
λ
2
3
1
4
n=5
secondo il modello di
de Broglie in quest'orbita
stazionaria ci sono 5
lunghezze d'onda
5
n=2
secondo il modello di
de Broglie in quest'orbita
stazionaria ci sono 2
lunghezze d'onda
2
1
Figure 28
Sono cioè possibili soltanto quelle orbite con una lunghezza pari ad un
multiplo intero della lunghezza d’onda associata all’elettrone.
De Broglie aveva capito un aspetto fondamentale della natura delle particelle
elementari: l’aspetto ondulatorio. Ma la realtà era ancora un pò diversa, infatti
86
non ci sono onde di materia che si propagano nello spazio, ma onde di
probabilità. Si deve introdurre un nuovo concetto astratto: la funzione d’onda,
che rappresenta in qualche modo la probabilità di trovare la particella
elementare in un determinato punto dello spazio ad un dato istante di tempo.
Si doveva aspettare Schroedinger per avere la prima formulazione della
dinamica quantistica mediante una equazione del moto, che ha preso il suo
nome.
L’equazione di Schroedinger
L’equazione di Schrödinger è l’equazione fondamentale della fisica nella
descrizione quanto-meccanica del moto. Si chiama anche equazione delle
onde. Essa è un’equazione differenziale alle derivate parziali che descrive il
modo in cui la probabilità (altrimenti chiamata funzione d’onda associata alla
particella microscopica) di trovare un elettrone in una certa posizione ad un
certo tempo, in altri termini rappresenta l’evoluzione temporale di un sistema
quanto-meccanico. È giusto notare che esiste anche un’altra rappresentazione
dovuta ad Heisenberg. L’equazione monodimensionale di Schrödinger ha la
seguente forma:
45.
dove i è l’unità immaginaria, Ψ è la funzione d’onda dipendente dal tempo, h
è la costante di Planck, V(x) è il potenziale del campo in cui la particella si
muove, e H è l’operatore Hamiltoniano. Questa equazione si può separare
nella sua parte spaziale e temporale, usando il metodo della separazione delle
variabili. Si cercano le soluzioni del tipo:
e sostituendo si ottiene:
Essendo l’energia totale E, si ottiene:
che è l’equazione di Schrödinger indipendente dal tempo.
I polinomi di Hermite e l’oscillatore armonico quantistico.
I polinomi di Hermite H[n,x] rappresentano le funzioni d’onda quantomeccaniche di un oscillatore armonico:
87
U= - k x2.
Essi sono soluzioni dell’equazione:
y”-2xy+2ny = 0
Figure 29
Sulla sinistra della figura 30 sono plottate le soluzioni dell’equazione di
Schrödinger del moto armonico, per i primi 4 stati dell’energia in funzione
della posizione (x). La probabilità di trovare la particella nella posizione x è il
quadrato della funzione d’onda, come rappresentato in figura 30 sulla destra.
Si noti che le soluzioni che si ottengono per valori più grandi di n presentano
numeri crescenti di picchi, ed essendo soluzioni che corrispondono a
lunghezze d’onda decrescenti, rappresentano stati dell’oscillatore con valori
crescenti di momento e di energia. Il valore di x più probabile, secondo la
meccanica quantistica, per lo stato di energia più bassa (n=0), è nell’origine.
Ciò è l’opposto di quanto avviene per l’oscillatore della meccanica classica,
per il quale il maggior tempo è speso agli estremi (dove la velocità tende a
zero). Si noti però che al crescere dell’energia la probabilità quantistica tende
ad avere una distribuzione più piccata agli estremi in accordo con la teoria
classica. Bohr chiamò “principio di corrispondenza” il limite in cui teoria
quantistica e classica tendono a fornire gli stessi risultati.
88
Il principio di corrispondenza e l’oscillatore quantistico
Sulla scala atomica dunque è necessaria la meccanica quantistica, ma da
qualche parte le due descrizioni, la quantistica e la classica, devono
convergere. È questa l’idea del principio di corrispondenza.
Figure 30
Esaminiamo in maggior dettaglio lo stato fondamentale (n=0) dell’oscillatore
quantistico (figura 31) e confrontiamolo con lo stato previsto dall’oscillatore
classico. Sono l’uno l’opposto dell’altro. Quantisticamente l’oscillatore passa il
maggior tempo vicino all’origine, mentre l’oscillatore classico passa il suo
tempo soprattutto agli estremi. Si noti inoltre che mentre per l’oscillatore
classico esiste un limite invalicabile che è rappresentato dalle due linee
verticali della figura 31, invece l’oscillatore quantistico può allontanarsi
dall’origine anche all’infinito, pur con una probabilità che decresce
esponenzialmente.
89
Figure 31
Gli stati quantistici ad energie crescenti sono caratterizzati da un addensarsi
di picchi di probabilità (figura 31) che approssimano sempre più il
comportamento aspettato dalla teoria classica (linea tratteggiata della figura
32). Inoltre la coda quantistica al di fuori della regione strettamente permessa
all’oscillatore classico, tende a diminuire rendendo la descrizione classica e
quantistica sempre più simili.
Beiser, calcolando la frequenza quantistica di radiazione di un atomo per
n=10,000, mostra che la differenza tra meccanica-quantistica e meccanica
classica è in tal caso trascurabile (dell’ordine di 0.01%).
90