Alma Mater Studiorum – Università diBologna
FACOLTA’ DI INGEGNERIA
Corso di Laurea in Ingegneria Gestionale
Insegnamento: Ricerca Operativa
OTTIMIZZAZIONE DEI PERCORSI
NELLA RACCOLTA DEI RIFIUTI
CASO HERA RAVENNA
Tesi di Laurea di:
Relatore:
GESSICA ZARRI
Chiar.mo Prof. Ing. DANIELE VIGO
Correlatori:
Chiar.mo Prof. Ing. PAOLO TOTH
Chiar.mo Prof. Ing. ALBERTO CAPRARA
Sessione III
Anno Accademico 2004-2005
Indice
Introduzione
pag. 1
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
pag. 3
1.1 Problematiche della gestione dei rifiuti
pag. 3
1.2 Normativa comunitaria
pag. 4
1.3 Normativa nazionale
pag. 4
1.3.1. Definizioni inerenti alla gestione dei rifiuti
pag. 5
1.3.2. Classificazione dei rifiuti
pag. 7
1.3.3. Gestione integrata dei rifiuti
pag. 9
1.3.4. Linee strategiche dell’Unione Europea
pag. 9
1.3.5. Riciclaggio e recupero
pag. 10
1.3.6. Territorializzazione
pag. 10
1.3.7. Principio della responsabilità condivisa
pag. 10
1.3.8. Tariffa di gestione dei rifiuti
pag. 11
1.3.9. Impiego di tecnologie pulite
pag. 11
1.3.10. Semplificazione delle procedure
pag. 11
1.3.11. Quadro conoscitivo
pag. 11
1.3.12. Gestione degli imballaggi
pag. 12
1.3.13. Specifiche delle competenze
pag. 13
1.3.14. Osservatorio Nazionale sui Rifiuti (ONR)
pag. 13
1.4 Strumenti di pianificazione per la gestione dei rifiuti
pag. 14
1.5 Rapporto Rifiuti 2004
pag. 15
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem pag. 19
2.1 Il Vehicle Routing Problem
pag. 19
2.2 Notazione utilizzate nella teoria dei grafi
pag. 20
2.3 Descrizione del Capacitated Vehicle Routing Problem
pag. 21
2.4 Varianti del VRP
pag. 23
2.5 Metodi risolutivi per il VRP
pag. 25
2.6 Procedure esatte per il VRP
pag. 25
2.7 Procedure euristiche classiche per il VRP
pag. 26
2.7.1. Metodi costruttivi
pag. 27
2.7.2. Metodi a due fasi
pag. 30
2.7.3. Metodi migliorativi
pag. 34
2.8 Procedure metaeuristiche per il VRP
pag. 34
2.8.1. Simulated Annealing (SA)
pag. 35
2.8.2. Deterministic Annealing (DA)
pag. 36
2.8.3. Tabu Search (TS)
pag. 36
2.8.4. Algoritmi genetici (GA)
pag. 38
2.8.5. Ant System
pag. 40
2.8.6. Reti Neurali
pag. 40
Capitolo 3 – Modello di pianificazione
pag. 43
3.1 Descrizione del problema
pag. 43
3.2 Descrizione del modello
pag. 43
3.3 Modello della rete stradale
pag. 44
3.4 Modello dati
pag. 48
3.4.1. Cassonetti
pag. 48
3.4.2. Punti raccolta
pag. 49
3.4.3. Archi
pag. 50
3.4.4. Nodi
pag. 51
3.4.5. Veicoli
pag. 51
3.4.6. Operatori
pag. 51
3.5 Vincoli del problema
pag. 52
3.6 Descrizione dell’algoritmo di ottimizzazione
pag. 53
3.7 Criteri di pianificazione
pag. 54
3.7.1. Calcolo di distanze, tempi e punteggi di priorità
pag. 55
3.7.2. Costruzione dei viaggi ammissibili
pag. 56
3.7.3. Omogeneizzazione ed ottimizzazione dei viaggi
pag. 58
3.7.4. Determinazione dei percorsi a costo minimo
pag. 58
Capitolo 4 – Attuale organizzazione del servizio di raccolta
pag. 61
4.1 Servizio di raccolta dei rifiuti nel Comune di Ravenna
pag. 61
4.2 Reparti di raccolta
pag. 63
4.3 Caratteristiche degli attuali percorsi di raccolta
pag. 65
Capitolo 5 – Sperimentazione dell’algoritmo
pag. 69
5.1 Premessa
pag. 69
5.2 Validazione del modello di rete stradale
pag. 70
5.3 Parametri di input e tipologie di simulazioni
pag. 75
5.4 Sommario dei dati
pag. 76
5.5 Ottimizzazione degli attuali reparti di raccolta
pag. 77
5.5.1. Ottimizzazione del reparto Forese 1
pag. 78
5.5.2. Ottimizzazione del reparto Forese 2
pag. 81
5.5.3. Ottimizzazione del reparto Forese 3
pag. 84
5.5.4. Ottimizzazione del reparto Forese 4
pag. 87
5.5.5. Ottimizzazione del reparto Forese 5
pag. 90
5.5.6. Ottimizzazione del reparto Forese 6
pag. 93
5.5.7. Ottimizzazione del reparto Forese 7
pag. 96
5.5.8. Ottimizzazione del reparto Forese 8
pag. 99
5.5.9. Ottimizzazione del reparto Forese 9
pag. 102
5.5.10. Ottimizzazione del reparto Forese 10
pag. 105
5.5.11. Ottimizzazione del reparto Forese 12
pag. 108
5.5.12. Ottimizzazione del reparto Forese 13
pag. 111
5.5.13. Resoconto delle simulazioni
pag. 114
5.6 Simulazione del reparto Forese 1 con discarica di Savio
pag. 118
5.7 Sperimentazione per i reparti Forese 7 e Forese 8
pag. 120
5.8 Sperimentazione per l’intero territorio
pag. 124
Conclusioni
pag. 129
Bibliografia
pag. 131
Introduzione
Introduzione
La gestione dei servizi di raccolta e di smaltimento dei rifiuti è un settore di grande rilevanza economica e
sociale, il cui assetto ha subito nell’ultimo decennio mutamenti considerevoli. L’aumento della quantità,
delle tipologie e della pericolosità di rifiuti prodotti negli ultimi decenni, determinato dalla crescita
economica e dal cambiamento dei consumi, ha generato una vera e propria fase di emergenza rifiuti,
conosciuta da quasi tutti i paesi industrializzati. Il tentativo di rispondere a questo stato di emergenza ha
portato ad una nuova politica di settore, imperniata sul risparmio di risorse e sul recupero energetico.
Secondo questo nuovo orientamento il rifiuto è da considerarsi risorsa e da gestire con un approccio
integrato, che responsabilizzi e faccia cooperare tutti i soggetti coinvolti, dalla produzione dei beni da cui si
originano i rifiuti allo smaltimento degli stessi, per favorire il riutilizzo, il riciclaggio ed il recupero dei rifiuti
ed ottimizzare lo smaltimento, nel rispetto della tutela ambientale e con l’obiettivo dell’autosufficienza nello
smaltimento. Inoltre la conseguente riorganizzazione di diverse aziende municipalizzate del settore ha
portato alla formazione di realtà economiche rilevanti, che devono far fronte alle esigenze di bacini di utenza
molto più vasti di quelli serviti tradizionalmente.
In una tale contesto è di fondamentale importanza il ruolo degli strumenti informatici per supportare il
monitoraggio, l’analisi dei dati, la gestione e l’ottimizzazione del servizio. Particolarmente significativo è il
loro contributo per la pianificazione dei percorsi di raccolta dei rifiuti, che risulta essere un problema di non
facile soluzione, per la numerosità di fattori da cui dipende, la molteplicità di vincoli cui è soggetto e la
varietà degli obiettivi cui è rivolto. Negli ultimi decenni si è assistito ad un crescente utilizzo di pacchetti
software, basati su tecniche proprie della Ricerca Operativa, per la pianificazione dei processi distributivi.
Tali tecniche, infatti, applicate alla risoluzione di numerose applicazioni pratiche riconducibili a problemi di
instradamento, hanno permesso un risparmio sui costi totali del trasporto dal 5% al 20%. Il successo di tali
tecniche è riconducibile ad una concomitanza di cause: lo sviluppo di nuovi modelli, che permettono di
considerare tutte le caratteristiche dei problemi reali; l’elaborazione di nuovi algoritmi, che consentono di
trovare buone soluzioni in tempi di calcolo relativamente brevi; lo sviluppo hardware e software nel campo
dell’informatica; la crescente integrazione dei sistemi informativi nei processi produttivi e commerciali. Il
risparmio sui costi di trasporto è particolarmente significativo per un’attività come quella della gestione dei
rifiuti, nella quale i costi di raccolta e di trasporto incidono per più del 60% sui costi operativi di gestione. Il
successo di tali tecniche è strettamente legato al contributo dell’esperienza di gestione, che permette di
delineare il quadro conoscitivo del problema in esame, di indirizzare il processo di ricerca della soluzione
organizzativa e di controllare e correggere le soluzioni ottenute.
Oggetto del presente studio è l’ottimizzazione dei percorsi di raccolta dei rifiuti solidi urbani indifferenziati
della zona periferica del comune di Ravenna, mediante l’applicazione di una procedura euristica di
ottimizzazione. La sperimentazione dell’algoritmo è stata effettuata in collaborazione con HERA Ravenna,
che ha fornito i dati reali necessari per la pianificazione.
5
Introduzione
La procedura euristica utilizzata, pur non essendo in grado di determinare la soluzione ottima, tuttavia
permette di ottenere soluzioni che tengono in considerazione i numerosi fattori da cui dipende il servizio e
che sono ottenibili in tempi relativamente rapidi.
6
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
CAPITOLO 1
Gestione dei rifiuti:
problematiche e normativa
1.1 Problematiche della gestione dei rifiuti
Le problematiche connesse alla gestione dei rifiuti hanno assunto negli ultimi
decenni proporzioni sempre maggiori, conseguentemente al progressivo
aumento sia della quantità di rifiuti prodotti, dovuto alla crescita economica e
all’aumento dei consumi, sia delle tipologie di rifiuti prodotti, dovuto alla
diversificazione dei processi produttivi. Questo ha generato impatti sempre più
pesanti sull'ambiente e sulla salute, in particolare:
•
sulle acque, a causa di scarichi diretti o del percolato delle discariche;
•
sull'aria, a causa sia delle emissioni di metano dalle discariche, provenienti
da processi degradativi della sostanza organica contenuta nei rifiuti, sia
delle emissioni di sostanze inquinanti da impianti di incenerimento;
•
sul suolo, a causa di scarichi accidentali o discariche incontrollate con
generazione di siti contaminati a scapito dell'ambiente e della collettività.
La gestione dei rifiuti deve avere come obiettivo primo la riduzione del consumo
di risorse ed un loro utilizzo ecoefficiente; a fronte di ciò una corretta politica di
gestione dei rifiuti richiede una strategia integrata, vale a dire una strategia che
riguardi l’intero ciclo del prodotto che a fine vita diventa rifiuto.
L’obiettivo della diminuzione della quantità e della pericolosità dei rifiuti
prodotti può essere perseguito solo mediante un’efficace politica di gestione e di
prevenzione, volta a promuovere:
•
il riutilizzo ed il riciclo dei rifiuti con recupero dei materiali;
•
il recupero energetico;
•
la raccolta differenziata;
•
l’utilizzo di materiali riciclati;
•
una gestione più efficace;
•
una rete di impianti adeguata e dotata di tecnologie pulite e forme di
recupero;
•
la produzione ed il consumo di beni a basso impatto ambientale.
7
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
1.2 Normativa comunitaria
Le direttive comunitarie 91/156/CE, relativa ai rifiuti, 91/689/CE, inerente ai
rifiuti pericolosi con la modifica 94/31/CE, 94/62/CE relativa agli imballaggi ed
ai rifiuti di imballaggio e 93/259/CE inerente alle spedizioni transfrontaliere dei
rifiuti, costituiscono un sistema compiuto di disciplina del settore dei rifiuti, cui
devono far riferimento tutti i membri dell’Unione Europea.
Tali direttive si rifanno a quattro principi fondamentali:
1) il principio di chi inquina paga, secondo il quale il costo della gestione dei
rifiuti deve essere sostenuto da chi li genera, cioè incorporato nei prezzi di
vendita dei prodotti o sopportato direttamente dalle comunità interessate;
2) il principio di prossimità, per cui i rifiuti devono essere smaltiti il più vicino
possibile al luogo dove sono generati;
3) il principio di autosufficienza, secondo il quale ogni territorio omogeneo
deve disporre di una capacità di smaltimento adeguata;
4) il principio della scala gerarchica, che impone di seguire un preciso ordine
nella gestione dei rifiuti: riduzione, riuso, riciclo e smaltimento finale
sicuro, al fine di circoscrivere il più possibile il ricorso alla discarica.
L’azione comunitaria prevede cinque linee di intervento:
•
prevenzione della formazione dei rifiuti;
•
riciclaggio e riutilizzo;
•
ottimizzazione del trattamento finale, in modo da ridurre al minimo il
ricorso alla discarica e comunque da garantire standard di alta sicurezza per
la localizzazione dei siti e da limitare l’incenerimento.
•
bonifica dei siti inquinati;
•
trasporto dei rifiuti.
1.3 Normativa nazionale
Il decreto legge n. 22 del 1997, meglio noto come decreto Ronchi, costituisce la
legge quadro che disciplina la gestione dei rifiuti, dei rifiuti pericolosi, degli
imballaggi e dei rifiuti di imballaggio in ambito nazionale, coerentemente con le
direttive in materia di rifiuti emanate dall’Unione Europea.
Tale decreto individua l’ambito, le tipologie di rifiuti, i principi base, le finalità,
le indicazioni di metodo, gli strumenti, le competenze, i divieti e le relative
sanzioni della gestione dei rifiuti.
8
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
Il Dlgs 22/97 ha avviato una vera e propria riforma del settore dei rifiuti,
promuovendo una gestione integrata, secondo un rigoroso ordine di priorità che
prevede:
•
la riduzione della produzione dei rifiuti e della loro pericolosità;
•
il riutilizzo e il riciclo di rifiuti con recupero dei materiale, attraverso la
raccolta differenziata;
•
il recupero energetico;
•
lo smaltimento per i rifiuti che residuano dalle operazioni di riciclo e di
recupero energetico o che non hanno possibilità di recupero.
Esso costituisce un'importante svolta sul piano legislativo e culturale per la sua
ricchezza e le innovazioni normative: una tra tutte, l’introduzione del concetto di
gestione integrata.
Di seguito saranno illustrati gli aspetti qualificanti del decreto.
1.3.1 Definizioni inerenti alla gestione dei rifiuti
L’ambito della gestione dei rifiuti richiede una serie di definizioni specifiche.
Prima tra tutte, la definizione di rifiuto, inteso come qualsiasi sostanza o oggetto
che rientri nelle categorie dell’allegato A del Dlgs 22/97 (di cui si riporta una
sintesi nella tabella 1) e di cui il detentore si disfi o abbia deciso di disfarsi o
abbia l’obbligo di disfarsi.
E quindi le definizioni di:
•
produttore: la persona la cui attività ha prodotto rifiuti e la persona che ha
effettuato operazioni che hanno mutato la natura o la composizione dei
rifiuti (come operazioni di pretrattamento o di miscuglio);
•
detentore: il produttore dei rifiuti o la persona fisica o giuridica che li
detiene;
•
gestione: la raccolta, il trasporto, il recupero e lo smaltimento di rifiuti,
compreso il controllo di queste operazioni ed il controllo delle discariche e
degli impianti di smaltimento dopo la chiusura;
•
raccolta: l’operazione di prelievo, di cernita e di raggruppamento dei rifiuti
per il loro trasporto;
•
raccolta differenziata: la raccolta idonea a raggruppare i rifiuti urbani in
frazioni merceologiche omogenee;
•
smaltimento: le operazioni previste nell’allegato B del Dlgs 22/97, tra le
quali si ricorda il deposito sul o nel suolo, il trattamento in ambiente
terrestre (biodegradazione), l’iniezione in profondità, l'incenerimento;
9
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
•
recupero: le operazioni previste nell’allegato C del Dlgs 22/97, tra le quali
si ricorda l'utilizzazione come combustibile o come altro mezzo per produrre energia, il riciclo ed il recupero di metalli, solventi, e sostanze organiche;
•
luogo di produzione dei rifiuti: uno o più edifici o stabilimenti o siti
infrastrutturali collegati tra loro all’interno di un’area delimitata in cui si
svolgono le attività di produzione dalle quali originano i rifiuti;
•
stoccaggio: le attività di smaltimento consistenti in operazioni di deposito
preliminare dei rifiuti e le attività di recupero consistenti nelle operazioni di
messa in riserva dei materiali;
•
deposito temporaneo: il raggruppamento dei rifiuti effettuato prima della
raccolta nel luogo in cui sono prodotti;
•
bonifica: ogni intervento di rimozione della fonte inquinante e di quanto
contaminato da essa;
•
messa in sicurezza: ogni intervento per il contenimento o l’isolamento
definitivo della fonte inquinante rispetto alle matrici ambientali circostanti;
•
combustibile da rifiuti: il combustibile ricavato dai rifiuti urbani mediante
trattamento finalizzato ad eliminare le sostanze pericolose per la
combustione ed a garantire un adeguato potere calorico;
•
compost da rifiuti: prodotto ottenuto dal compostaggio della frazione
organica dei rifiuti urbani.
Categorie di rifiuti
Q1
Q2
Q3
Q4
Q5
Q6
Q7
Q8
Q9
Q10
Q11
Q12
Q13
Q14
Q15
Q16
Descrizione
Residui di produzione o di consumo
Prodotti fuori norma
Prodotti scaduti
Sostanze accidentalmente riversate o perdute, compresi
tutti i materiali da esse contaminati
Sostanze volontariamente contaminate o insudiciate
Elementi inutilizzabili
Sostanze divenute inadatte all’impiego
Residui di processi industriali
Residui di procedimenti antinquinamento
Residui di lavorazione/sagomatura
Residui provenienti da estrazione di materie prime
Sostanze contaminate
Sostanza la cui utilizzazione è giuridicamente vietata
Prodotti di cui il detentore non si serve più
Prodotti provenienti da attività di riattamento di terreni
Prodotti che non rientrano nelle categorie precedenti
Tabella 1.1 Esempio di categorie di rifiuti
10
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
1.3.2 Classificazione dei rifiuti
Coerentemente con le direttive europee (Catalogo CER), il Dlgs 22/97 definisce
una classificazione dei rifiuti rispetto alla provenienza ed alla pericolosità,
distinguendo i rifiuti urbani da quelli speciali e i rifiuti pericolosi da quelli non
pericolosi.
In particolare, sono rifiuti urbani:
•
rifiuti domestici provenienti da locali e luoghi ad uso di civile abitazione;
•
rifiuti non pericolosi, provenienti da locali e luoghi adibiti ad uso non di
civile abitazione, assimilati ai rifiuti urbani per qualità e quantità;
•
rifiuti provenienti da spazzamento delle strade;
•
rifiuti di qualunque natura o provenienza giacenti su strade e aree
pubbliche;
•
rifiuti vegetali provenienti da aree verdi.
E sono rifiuti speciali:
•
rifiuti da attività agricole e agro-industriali;
•
rifiuti da attività di demolizione, costruzione e scavo;
•
rifiuti da lavorazioni industriali, artigianali, commerciali o di servizio;
•
rifiuti da attività di recupero e smaltimento di rifiuti;
•
rifiuti da attività sanitarie;
•
macchinari ed apparecchiature deteriorati e obsoleti;
•
veicoli a motori e rimorchi fuori uso e loro parti.
Sono considerati rifiuti pericolosi i rifiuti non domestici precisati nell’allegato D
del Dlgs 22/97, sulla base degli allegati G, H, I del decreto stesso, che indicano,
rispettivamente, le categorie di rifiuti pericolosi, i costituenti che rendono
pericolosi i rifiuti e le caratteristiche di pericolo dei rifiuti. In particolare, un
rifiuto è pericoloso se presenta una caratteristica di pericolo, quale ad esempio la
possibilità di esplosione, combustione, o tossicità, o contiene un costituente
pericoloso, come ad esempio composti di amianto, nichel, fosforo o piombo.
Fondamentale ai fini della raccolta e dello smaltimento dei rifiuti è il criterio
qualitativo e quantitativo in base al quale i rifiuti speciali non pericolosi possono
essere assimilati ai rifiuti urbani: la determinazione di tale criterio di
assimilazione è di competenza dei comuni. In particolare per il comune di
Ravenna, sono da considerarsi rifiuti urbani anche i rifiuti speciali non pericolosi
derivanti da attività industriali, artigianali, commerciali e di servizi, purché
rispettino le seguenti condizioni:
11
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
o
la composizione merceologica deve essere analoga a quella dei rifiuti
urbani;
o
la di produzione annua non deve superare la soglia limite definita da 2SKd,
dove S è la superficie occupata dall’attività di produzione, e Kd è il
coefficiente di produzione dei rifiuti (kg/m2) di ciascun’attività.
Per ogni tipologia di rifiuto vengono adottate differenti modalità di trattamento.
La tabella seguente mostra un esempio della classificazione europea dei rifiuti
secondo il Catalogo Europeo dei Rifiuti (CER)
Cod. CER
20 00 00
20 01 00
20 01 01
20 01 02
20 01 03
20 01 04
20 01 05
20 01 06
20 01 07
20 01 08
20 01 09
20 01 10
20 01 11
20 01 12
20 01 13
20 01 14
20 01 15
20 01 16
20 01 17
20 01 18
20 01 19
20 01 20
20 01 21
20 01 22
20 01 23
20 01 24
20 02 00
20 02 01
20 02 02
20 02 03
20 03 00
20 03 01
20 03 02
20 03 03
20 03 04
20 03 05
Descrizione
rifiuti solidi urbani ed assimilabili
raccolta differenziata
carta e cartone
vetro
plastica (piccole dimensioni)
altri tipi di plastica
metallo (piccole dimensioni, es. lattine)
altri tipi di metallo
legno
rifiuti di natura organica per compostaggio
oli e grassi
abiti
prodotti tessili
vernici, inchiostri, adesivi
solventi
acidi
rifiuti alcalini
detergenti
prodotti fotochimici
medicinali
pesticidi
batterie e pile
tubi fluorescenti ed altri rifiuti contenenti mercurio
aerosol
apparecchiature contenenti clorofluorocarburi
apparecchiature elettroniche (schede elettroniche)
rifiuti di giardini e parchi
rifiuti compostabili
terreno e rocce
altri rifiuti non compostabili
altri rifiuti urbani
rifiuti urbani misti
rifiuti di mercati
rifiuti di pulizia delle strade
fanghi di serbatoi settici
veicoli fuori uso
Tabella 1.2 Codice CER dei rifiuti solidi urbani
12
Pericolo
*
*
*
*
*
*
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
1.3.3 Gestione integrata dei rifiuti
Il quadro normativo promuove una gestione integrata dei rifiuti, intesa come il
complesso delle attività volte ad ottimizzare il riutilizzo, il riciclaggio, il
recupero e lo smaltimento dei rifiuti. In particolare è posto in risalto il fatto che
la gestione dei rifiuti è un’attività di pubblico interesse e in quanto tale deve
essere svolta in un’ottica di profonda sinergia (responsabilizzazione e
cooperazione) tra tutti i soggetti coinvolti nella produzione, nella distribuzione,
nell’utilizzo e nel consumo di beni da cui si originano i rifiuti. Questo nuovo
approccio permette di superare la separazione tra raccolta e smaltimento, che ha
caratterizzato la filiera del servizio di igiene urbana (SIU) nel nostro paese negli
scorsi decenni.
1.3.4 Linee strategiche dell’Unione Europea
Coerentemente con le linee strategiche definite dall’Unione Europea., la
normativa individua come obiettivi fondamentali della gestione dei rifiuti:
1) l’assicurazione di un’elevata protezione dell’ambiente e della salute
pubblica; in riferimento a ciò, i rifiuti devono essere smaltiti senza
determinare rischi per acqua, aria, suolo, fauna, flora, senza causare
inconvenienti da rumori o da odori e senza danneggiare il paesaggio ed i siti
di particolare interesse;
2) la riduzione della quantità e della pericolosità dei rifiuti prodotti; questo
obiettivo deve essere perseguito mediante lo sviluppo e la promozione di:
tecnologie pulite che permettano un risparmio di risorse naturali, strumenti
ecologici per valutare l’impatto ambientale di uno specifico prodotto e
prodotti concepiti per contribuire il meno possibile sulla quantità, sul
volume, sulla pericolosità e sui rischi di inquinamento dei rifiuti;
3) la riduzione dello smaltimento dei rifiuti, mediante il reimpiego, il
riciclaggio ed altre forme di recupero per ottenere materia prima dai rifiuti,
l’impiego dei materiali recuperati e l’utilizzazione dei rifiuti come
combustibile o altro mezzo per produrre energia;
4) la realizzazione dell’autosufficienza nello smaltimento dei rifiuti non
pericolosi in ambiti territoriali ottimali, mediante una rete integrata ed
adeguata di impianti di smaltimento.
Sempre in linea con le direttive comunitarie, il decreto disciplina il trasporto dei
rifiuti e la bonifica ed il ripristino ambientale dei siti inquinati.
13
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
In particolare, per quanto riguarda il trasporto dei rifiuti, la normativa prevede
che durante il trasporto effettuato da enti o imprese i rifiuti devono essere
accompagnati da un formulario di identificazione, nel quale sono indicati: il
nome e l’indirizzo del produttore e del detentore; l’origine, la tipologia e la
quantità del rifiuto; l’impianto di destinazione; la data e il percorso
dell’istradamento; il nome e l’indirizzo del destinatario. Tali disposizioni non si
applicano né al trasporto di rifiuti urbani effettuato dal soggetto che gestisce il
servizio pubblico, né al trasporto di una quantità inferiore a 30 kg/gg effettuato
dal produttore dei rifiuti stessi.
1.3.5 Riciclaggio e recupero
Il provvedimento attribuisce un ruolo centrale al riciclaggio ed al recupero di
materia prima ed energia, limitando lo smaltimento ai soli rifiuti che residuano
dalle operazioni di riciclo e di recupero energetico o che non hanno possibilità di
recupero. Questo aspetto rappresenta una vera e propria svolta rispetto alla
passata politica di settore strettamente legata allo smaltimento finale ed in
particolare allo stoccaggio definitivo in discarica.
1.3.6 Territorializzazione
Il provvedimento individua nella territorializzazione dello smaltimento la strada
per arrivare all'autosufficienza nello smaltimento in ambiti territoriali ottimali,
individuando nella Provincia questo ambito ottimale. E’ comunque data la
possibilità alla Regione di definire ambiti diversi, a seconda delle esigenze.
Riportare la responsabilità vicina a chi produce i rifiuti è necessario per
promuovere riciclaggio e recupero.
1.3.7 Principio della responsabilità condivisa
Il Dlgs 22/97 disciplina gli oneri di detentori e produttori dei rifiuti.
Il detentore dei rifiuti deve sostenere gli oneri relativi alle attività di
smaltimento: deve consegnare i rifiuti ad un raccoglitore autorizzato o ad un
soggetto che effettua la raccolta. Il produttore dei rifiuti speciali assolve i propri
obblighi con le seguenti priorità: autosmaltimento dei rifiuti, conferimento dei
rifiuti a terzi autorizzati, conferimento dei rifiuti a soggetti che gestiscono il
servizio pubblico di raccolta dei rifiuti urbani, esportazione dei rifiuti secondo le
modalità imposte dalla direttiva europea 93/259/CE. La responsabilità del
detentore per il corretto recupero o smaltimento dei rifiuti è esclusa in caso di
14
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
conferimento dei rifiuti al servizio pubblico di raccolta ed in caso di
conferimento dei rifiuti a soggetti autorizzati alle attività di recupero o
smaltimento.
1.3.8 Tariffa di gestione dei rifiuti
Uno degli strumenti più incisivi per l’incentivazione della raccolta differenziata
e della responsabilità condivisa è la sostituzione della tassa con la tariffa di
gestione dei rifiuti e la relativa struttura tariffaria. Infatti, la tariffa, articolata per
fasce di utenza, è costituita da una quota determinata in relazione alle
componenti essenziali del costo del servizio e da una quota variabile rapportata
alla quantità di rifiuti conferiti da ciascun utente. In particolare, nella
modulazione della tariffa sono assicurate agevolazioni per le utenze domestiche
e per la raccolta differenziata.
1.3.9 Impiego di tecnologie pulite
La normativa individua come primo strumento per la riduzione della quantità e
della pericolosità dei rifiuti prodotti lo sviluppo di tecnologie pulite, che
consentano un risparmio di risorse naturali. Per favorire la sperimentazione e lo
sviluppo delle tecnologie pulite il Dlgs 22/97 prevede specifici accordi di
programma per settore tra la pubblica amministrazione e gli operatori economici.
1.3.10 Semplificazione delle procedure
Il Dlgs 22/97 introduce delle semplificazioni procedurali per l’esercizio delle
attività di raccolta e di trasporto, con particolare riferimento all’autosmaltimento
e alla raccolta differenziata. Tale semplificazione è controbilanciata dalle
responsabilità penali cui l’operatore economico va incontro se non rispetta le
condizioni operative previste.
1.3.11 Quadro conoscitivo
Per una corretta gestione dei rifiuti è fondamentale disporre di dati completi e
aggiornati relativi a quantità e qualità dei rifiuti, raccolta differenziata, soggetti
coinvolti e costi. Le informazioni sono raccolte mediante due principali
strumenti: il Catasto dei rifiuti e i Registri di carico e scarico introdotti dal Dlgs
22/97.
Il Catasto dei rifiuti è un registro, la cui organizzazione è a carico del Ministero
dell’Ambiente, che contiene tutte le informazioni quantitative e qualitative
relative alle fasi di raccolta, trasporto e smaltimento dei rifiuti, permettendo,
15
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
così, di delineare un quadro conoscitivo completo ed aggiornato delle attività di
gestione dei rifiuti, a livello provinciale, regionale e nazionale. Chiunque effettui
attività di raccolta e di trasporto dei rifiuti deve comunicare annualmente le
quantità e le caratteristiche qualitative dei rifiuti in oggetto. I comuni, i consorzi,
le comunità e le aziende speciali finalizzate allo smaltimento dei rifiuti devono
comunicare annualmente le informazioni relative a: quantità di rifiuti urbani,
soggetti che hanno provveduto alla gestione dei rifiuti, operazioni svolte,
tipologie e quantità di rifiuti gestiti, costi di gestione e di ammortamento tecnico
e finanziario, proventi della tariffa, dati relativi alla raccolta differenziata. Le
sezioni regionali e provinciali provvedono all’elaborazione dei dati e alla
successiva trasmissione alla sezione nazionale.
I Registri di carico e scarico sono a carico dei soggetti che effettuano, a titolo
professionale, attività di raccolta e di trasporto dei rifiuti, e servono per annotare
le caratteristiche qualitative e quantitative dei rifiuti: origine, quantità,
caratteristiche e destinazione dei rifiuti, data di carico e scarico, mezzo
utilizzato, trattamento previsto.
1.3.12 Gestione degli imballaggi
Il Titolo III del Dlgs 22/97 disciplina la gestione degli imballaggi e dei rifiuti di
imballaggio, secondo il principio della “responsabilità condivisa”, al fine di:
•
ridurre la quantità e la pericolosità degli imballaggi e dei rifiuti di
imballaggio, mediante la promozione allo sviluppo di tecnologie pulite ed
alla produzione ed utilizzazione di imballaggi riutilizzabili;
•
incentivare il riciclaggio ed il recupero di materia prima, mediante la
promozione alla raccolta differenziata e all’utilizzo di materiali riciclati.
Il decreto stabilisce precisi obiettivi di recupero e di riciclaggio dei rifiuti di
imballaggio, che devono essere perseguiti dai produttori e dagli utilizzatori di
imballaggi.
Obiettivi di recupero e di riciclaggio
Entro 5 anni dall’entrata in vigore del Dgsl 22/97
minimi
rifiuti di imballaggi da recuperare
in peso almeno il
50%
rifiuti di imballaggi da riciclare
in peso almeno il
25%
ciascun materiale di imballaggio da riciclare
in peso almeno il
15%
massimi
Tabella 1.3 Obiettivi di recupero e di riciclo per imballaggi
16
65%
24%
25%
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
Il non raggiungimento di tali obiettivi comporta l’applicazione di misure di
carattere pecuniario, proporzionate al mancato raggiungimento dei singoli
obiettivi: tali somme vengono utilizzate per promuovere la prevenzione, la
raccolta differenziata, il riciclaggio ed il recupero dei rifiuti di imballaggio.
Per il raggiungimento degli obiettivi globali di recupero e di riciclaggio e per
garantire il necessario raccordo con l’attività di raccolta differenziata, effettuata
dalle pubbliche amministrazioni, i produttori e gli utilizzatori di imballaggi
costituiscono il Consorzio Nazionale Imballaggi (CONAI).
1.3.13 Specifica delle competenze
Per realizzare la gestione dei rifiuti il Dlgs 22/97 definisce e distingue le
competenze delle diverse autorità.
a) Competenze dello Stato: allo Stato spettano le funzioni di indirizzo e di
coordinamento necessarie all’attuazione del decreto stesso; in particolare lo
Stato deve definire le linee guida (obiettivi, criteri generali, metodologie)
che devono essere seguite dalle Regioni e dalle Province per realizzare una
gestione dei rifiuti integrata, con prefissati livelli di qualità e tesa al
riciclaggio e al recupero di materia prima.
b) Competenze delle Regioni: le Regioni hanno il compito di predisporre e
regolamentare l’ambito, le infrastrutture e le modalità per l’attività di
gestione dei rifiuti.
c) Competenze delle Province: alle Province spettano le funzioni di
programmazione, di verifica e di controllo delle attività di gestione dei
rifiuti.
d) Competenze dei Comuni: i Comuni effettuano la gestione dei rifiuti urbani e
dei rifiuti assimilati avviati allo smaltimento, stabilendo le disposizioni
necessarie per ottimizzare le forme di conferimento, raccolta e trasporto, in
modo da promuovere la sicurezza delle operazioni ed il recupero dei rifiuti.
1.3.14 Osservatorio Nazionale sui Rifiuti (ONR)
Al fine di garantire l’attuazione delle norme del Dgls 22/97 è istituito, presso il
Ministero dell’Ambiente, l’Osservatorio Nazionale sui Rifiuti (ONR), che svolge
le seguenti funzioni:
•
vigila sulla gestione dei rifiuti, degli imballaggi e dei rifiuti di imballaggio;
•
elabora ed aggiorna i criteri e gli obiettivi di azione;
•
verifica i costi di recupero e di smaltimento;
17
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
•
verifica i livelli di qualità dei servizi erogati;
•
predispone un rapporto annuale sulla gestione dei rifiuti, degli imballaggi e
dei rifiuti di imballaggio.
1.4 Strumenti di pianificazione per la gestione dei rifiuti
Le Regioni, sentite le Province e i Comuni, devono predisporre piani regionali
per la pianificazione e l’organizzazione della gestione dei rifiuti.
I piani regionali di gestione dei rifiuti sono elaborati sulla base dei principi
fondamentali
di
cooperazione
tra
Regioni,
Province
e
Comuni,
di
semplificazione dei procedimenti amministrativi e di riorganizzazione delle
competenze e sono finalizzati alla promozione alla riduzione della quantità, dei
volumi e della pericolosità dei rifiuti prodotti.
Le indicazioni strategiche alla base dei piani regionali sono fondamentalmente
rivolte a:
•
ridurre la produzione di rifiuti, mediante la promozione e lo sviluppo di
strumenti di tipo volontario negoziale, attività di formazione e
informazione, tecnologie innovative, programmi di finanziamento per il
miglioramento del sistema di gestione dei rifiuti;
•
massimizzare il recupero ed il reimpiego dei rifiuti;
•
garantire un’adeguata sicurezza per l’ambiente e per la salute dei cittadini
nelle attività di trasporto e di smaltimento, mediante la previsione di una
rete integrata ed adeguata di impianti, che permetta l’autosufficienza dello
smaltimento in ciascun ambito territoriale e lo smaltimento in un luogo
prossimo al luogo di produzione;
•
aumentare la raccolta differenziata, mediante l’indicazione di criteri per la
realizzazione delle stazioni ecologiche, per garantire condizioni di
accessibilità in termini di tempo e di distanza alla maggior parte della
cittadinanza;
•
realizzare un adeguato sistema di impianti, mediante la previsione di
potenzialità, di bacino di utenza, e di localizzazione di tutti i tipi di impianti
per il recupero e lo smaltimento.
L’approvazione del piano regionale o il suo adeguamento è condizione
necessaria per accedere ai finanziamenti nazionali.
I principali strumenti di pianificazione sono:
18
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
a) Piano
Territoriale
Regionale
(PTR):
il
PTR
è
uno
strumento
programmatico che contiene gli indirizzi, gli obiettivi e le azioni che devono
essere specificati, approfonditi ed attuati dalla pianificazione provinciale di
settore;
b) Piani Territoriali di Coordinamento Provinciale (PTCP): il PTCP è uno
strumento di pianificazione che delinea le linee di azione della
programmazione regionale sul territorio provinciale, il controllo e la verifica
delle politiche settoriali e l’analisi dell’andamento tendenziale della
produzione dei rifiuti; in particolare, esso analizza l’andamento della
produzione dei rifiuti, stabilisce gli obiettivi prestazionali settoriali, e
individua le zone non idonee alla localizzazione degli impianti di
smaltimento e recupero dei rifiuti urbani e speciali;
c) Piani Provinciali per la Gestione dei Rifiuti (PPGR): il PPGR è un piano
settoriale che contiene quanto previsto dal Dlgs 22/97; in particolare esso
specifica e approfondisce il quadro conoscitivo, sviluppa gli obiettivi
prestazionali di settore, definisce le modalità più opportune per il
perseguimento di tali obiettivi, descrive il sistema impiantistico esistente e
definisce quello di progetto.
d) Piano d’ambito per l’organizzazione del servizio di gestione dei rifiuti
urbani: il piano d’ambito, nel rispetto del quadro delineato dai piani
precedenti, pianifica e programma le attività necessarie per l’organizzazione
dei servizi di gestione dei rifiuti.
La Provincia, quindi, pianifica il sistema di gestione dei rifiuti attraverso gli
indirizzi contenuti nel PTCP e con le scelte indicate nel PPGR; la pianificazione
contenuta nel sistema PTCP-PPGR definisce per i rifiuti urbani gli obiettivi
generali e il sistema impiantistico necessari per garantire l’autonomia d’ambito;
il Piano d’ambito, nel rispetto di questo quadro, pianifica e programma le attività
necessarie per l’organizzazione dei servizi di gestione dei rifiuti
1.5 Rapporto Rifiuti 2004
L’Agenzia per la Protezione dell’Ambiente e per i Servizi Tecnici (APAT) e
l’Osservatorio Nazionale sui Rifiuti (ONR) realizzano annualmente un rapporto
sui rifiuti, che fornisce un quadro conoscitivo generale del ciclo di gestione dei
rifiuti prodotti in Italia (raccolta differenziata, trattamento, recupero e
smaltimento). Di seguito si riportano alcuni dei dati evidenziati dal Rapporto sui
Rifiuti del 2004.
19
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
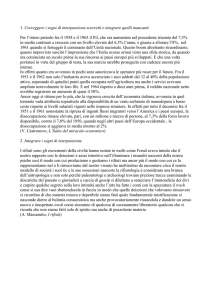
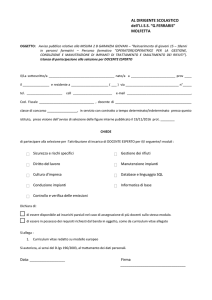
In relazione alla produzione dei rifiuti urbani, si ha che:
•
la produzione di rifiuti urbani nel 2003 si attesta a circa 30 milioni di
tonnellate, con un incremento, rispetto al 2002, intorno allo 0,6%.;
•
il tasso complessivo di crescita della produzione diminuisce, come nel
triennio precedente, dopo il significativo incremento del biennio 1998-1999;
•
la produzione pro capite di rifiuti nel 2003 è di 524 kg/abitante⋅anno.
produzione rifiuti (1.000 t)
31.000
30.000
28.958
29.000
29.409
29.864
30.039
2002
2003
28.364
28.000
27.000
26.000
25.800
25.900
1995
1996
26.605
26.846
1997
1998
25.000
24.000
23.000
1999
2000
2001
Figura 1.1 Produzione di rifiuti urbani in Italia negli anni 1995-2003
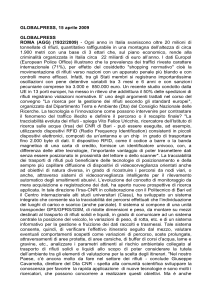
In relazione alla gestione dei rifiuti, i dati evidenziano:
•
una forte riduzione dello smaltimento in discarica del 20% in cinque anni;
•
un debole aumento del ricorso alla termovalorizzazione;
•
una lieve crescita del ricorso all’incenerimento, che non raggiunge ancora i
livelli degli altri Paesi dell'Unione Europea (9,4% nel 2003 contro il 18%
della media europea nel 2001).
7,6
2,4
8,8
9,0
51,2
21,0
discarica
biostabilizzato + CDR
altre forma di recupero
incenerimento
compost da frazioni selezionate
frazione secca stoccata in Campania
Figura 1.2 Gestione dei rifiuti urbani in Italia nel 2003
20
Capitolo 1 – Gestione dei rifiuti: problematiche e normativa
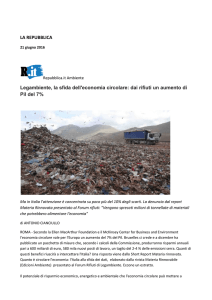
In relazione alla raccolta differenziata, si ha che:
•
la raccolta differenziata, nel 2003, ammonta a oltre 6,4 milioni di tonnellate
rispetto ai 5,7 milioni del 2002, passando così dal 19,2% del 2002 al 21,5%
del 2003, con una crescita della quota percentuale del 3%;
•
a livello nazionale, quindi, non si è ancora conseguito l'obiettivo del Dlgs
22/97 per il 2001
•
al Nord, la raccolta differenziata si attesta nel 2003 intorno a 4,6 milioni di
tonnellate, per un valore percentuale del 33,5%, sfiorando, quindi, ma non
raggiungendo, l’obiettivo del 35% fissato dal decreto Ronchi per il 2003;
•
al Centro la raccolta differenziata si attesta nel 2003 ad 1,1 milioni di
tonnellate, per un valore percentuale del 17,1%, raggiungendo così con
quattro anni di ritardo il target del 15% della normativa per il 1999;
•
al Sud, la raccolta differenziata si attesta intorno a 760 mila tonnellate, pari
ad un valore percentuale pari al 7,7%;
•
su scala regionale, si rilevano elevati livelli di raccolta differenziata per
Lombardia (40%) e Veneto (42%), seguono poi Trentino Alto Adige
(27,7%) ed Emilia Romagna (26,3%).
40,0
35,0
30,0
25,0
33,5
30,6
28,6
24,4
23,1
20,0
17,1
14,6
12,8
11,4
9,0
15,0
10,0
5,0
21,5
19,2
17,4
14,4
13,1
7,7
6,3
4,7
2,02,4
0,0
Nord
Centro
Sud
Italia
1999
2000
2001
2002
2003
obiettivo 1999
obiettivo 2000
obiettivo 2003
Figura 1.3 Raccolta differenziata in Italia negli anni 1999-2003
21
22
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
CAPITOLO 2
Algoritmi euristici per il
Vehicle Routing Problem
2.1 Il Vehicle Routing Problem
Con il termine Vehicle Routing Problem (VRP) si intende un’intera classe di problemi che ha per oggetto lo studio di tecniche per la pianificazione dei percorsi
di una flotta di veicoli, che svolgono un servizio di distribuzione di beni
materiali tra un sistema di depositi ed un insieme di clienti. Si tratta quindi di
problemi in cui bisogna strutturare un sistema di percorsi, veicoli e clienti che,
nel rispetto dei vincoli imposti dal servizio, minimizzi i costi totali del servizio.
Talvolta il problema può riguardare anche la pianificazione degli orari ed in tal
caso si parla di Vehicle Routing and Scheduling Problem.
Molteplici sono le applicazioni pratiche riconducibili ad un problema di
instradamento, come: la raccolta dei rifiuti, oggetto di studio del presente lavoro,
la consegna ed il prelievo delle merci, la pulizia delle strade mediante veicoli, la
raccolta della posta nelle cassette postali, il servizio di scuolabus.
Sempre più spesso la pianificazione dei sistemi di distribuzione è realizzata
mediante pacchetti software, basati su tecniche di ricerca operativa e di
programmazione lineare, conseguentemente ad i successi ottenuti da tali metodi
in relazione a numerose applicazioni pratiche.
La maggior parte dei problemi di Vehicle Routing sono problemi “difficili”, nel
senso che per essi non si conoscono algoritmi esatti con tempo di esecuzione
polinomiale nella dimensione del problema. Più precisamente, questi problemi
appartengono ad una classe di problemi del tipo NP-difficili, cioè problemi che
potrebbero essere risolti in tempo polinomiale da un algoritmo branch-andbound intelligente che ad ogni passo generi solo il figlio giusto; ma nella teoria
della complessità viene considerato il caso peggiore o quello medio e, quindi, si
dice che l’esecuzione di algoritmi che risolvano in modo esatto questi problemi
richiede un tempo di calcolo esponenziale nella dimensione del problema.
In riferimento all’elevata complessità del problema, gli approcci risolutivi sono
di due tipi:
•
Procedure risolutive esatte, che cercano la soluzione ottima in tempi
esponenziali;
23
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
•
Procedure risolutive euristiche, che ricercano una soluzione approssimata
ma soddisfacente, in relazione ad opportuni criteri, con tempi molto
inferiori.
Molto spesso si preferisce realizzare buoni algoritmi euristici, piuttosto che
algoritmi esatti, per cercare di trovare il giusto compromesso tra la qualità della
soluzione trovata ed il tempo di calcolo speso per ottenerla.
La risoluzione dei problemi di routing prevede la costruzione di un modello a
grafo. I problemi possono essere modellati come problemi di Node Routing o
come problemi di Arc Routing. Nei problemi di Arc Routing l’importanza
fondamentale è rivestita dagli archi, che costituiscono la rete in cui il servizio
viene svolto. Nei problemi di Node Routing, invece, l’importanza fondamentale
risiede nei nodi, che in genere sono intesi come le locazioni dei clienti da
servire, mentre gli archi sono sostanzialmente elementi dei percorsi che
connettono i nodi. Nel presente studio l’approccio utilizzato si basa su un
modello di riferimento di tipo Node Routing, che permette un’accurata
descrizione del problema reale, anche se richiede un maggiore tempo di calcolo
nel caso si abbia un’elevata densità dei punti di servizio lungo una strada. Con
particolare riferimento al servizio di raccolta dei rifiuti, che è l’oggetto di studio
del presente lavoro, il servizio deve essere modulato in base alla frequenza di
svuotamento di ogni punto raccolta: se si utilizzasse un modello di tipo Arc
Routing, l’attività di raccolta farebbe riferimento ai singoli archi, e quindi il
servizio di un intero arco implicherebbe lo svuotamento di tutti i cassonetti
appartenenti a quell’arco, indipendentemente dalla loro frequenza di servizio;
mentre, se si utilizza un modello di tipo Node Routing, il servizio può essere
modulato in riferimento alle caratteristiche specifiche di ogni punto di raccolta
presente su un arco.
2.2 Notazione utilizzata nella teoria dei grafi
La risoluzione dei problemi di tipo VRP passa attraverso la loro modellazione su
un grafo. In relazione a ciò, è necessario introdurre qualche notazione utilizzata
nella teoria dei grafi, per rendere la trattazione successiva più chiara.
Per grafo si intende una struttura G = (V, A =D ∪ E), individuata da un insieme
V di nodi i = 1,…,n, da un insieme A di archi del tipo (i, j), che congiunge i nodi
i e j, costituito da un insieme D di archi orientati e da un insieme E di archi non
orientati. Un arco (i, j) è orientato se rappresenta una connessione diretta dal
nodo i al nodo j, mentre è non orientato se rappresenta un collegamento tra i
24
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
nodi i e j senza specificarne il verso.Il grafo G è orientato se l’insieme E è
vuoto, è non orientato se l’insieme D è vuoto ed è misto se entrambi gli insiemi
D ed E sono non vuoti. Il grafo G è pesato se ad ogni arco (i, j) è associato un
peso, corrispondente al costo cij del servizio su quell’arco. In genere si assume
che il costo cij di un arco (i, j) sia positivo o nullo, cioè che: cij ≥ 0 ∀ (i, j) ∈ A. Il
grafo G è connesso se per ogni coppia di nodi i e j del grafo esiste un cammino
che li collega. In relazione ad un grafo misto G = (V, A =D ∪ E), si definiscono:
o
stella uscente del nodo i l’insieme, indicato con ∆+(i), di tutti i nodi j tali
che (i, j) ∈ D;
o
grado uscente del nodo i, indicato con d+(i), la cardinalità di ∆+(i);
o
stella entrante del nodo i l’insieme, indicato con ∆-(i), di tutti i nodi l tali
che (l, i) ∈ D;
o
grado entrante del nodo i,indicato con d-(i), la cardinalità di ∆-(i);
o
grado del nodo i in (V, E), indicato con d(i), la cardinalità dell’insieme ∆(i)
di tutti i nodi m tali che (i, m) ∈ E.
Un ciclo (o viaggio o tour) di un grafo G = (V, A) è una sequenza di nodi ik e di
archi ak (orientati o non orientati) del tipo (i1, a1, i2, a2,…, ik, ak,…, ip, ap, ip+1),
dove ak è l’arco che collega i nodi ik ed ik+1, tale che i1 = ip+1. Un ciclo è
euleriano (euler tour) se contiene ogni arco del grafo G esattamente una volta,
mentre è un postman tour se contiene ogni arco di G almeno una volta, ed è un
covering tour se copre tutti gli archi del grafo G. Un grafo euleriano è un grafo
che possiede un ciclo euleriano. E’ da notare che questa definizione dipende
dall’insieme di archi considerato per G: un qualunque grafo può essere
trasformato in un grafo euleriano aumentando il numero di archi. Un ciclo è
hamiltoniano se visita una ed una sola volta tutti i vertici del grafo. Un grafo
hamiltoniano è un grafo che contiene almeno un ciclo hamiltoniano. E’ da notare
che non si conoscono condizioni semplici per verificare se un dato grafo G è
hamiltoniano; condizioni necessarie, ma non sufficienti, sono che G sia connesso
e con grado d(i) ≥ 2 per ogni nodo i di V. Un grafo orientato è hamiltoniano se
esiste un ciclo semplice che passa una sola volta per tutti i vertici del grafo.
2.3 Descrizione del Capacitated Vehicle Routing Problem
Esistono molte versioni del VRP, conseguenti al tentativo di modellare al meglio
le molteplici situazioni pratiche riconducibili ad un problema di instradamento.
Per una descrizione più approfondita del VRP, si fa riferimento alla versione più
25
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
comune di questa classe di problemi: il Capacitated Vehicle Routing Problem
(CVRP). Il CVRP consiste nel pianificare l’uso di una flotta di veicoli con
capacità limitata, che devono visitare un certo numero di clienti per prelevare o
consegnare della merce: si tratta quindi di stabilire quali clienti deve visitare
ciascun veicolo ed in quale ordine, in modo da minimizzare i costi. Più
specificatamente, la soluzione del CVRP consiste nel determinare un sistema di
circuiti (route), ognuno percorso da un singolo veicolo, che partono da un
determinato deposito e vi fanno ritorno, tali da rispettare i vincoli di capacità dei
veicoli e da soddisfare i requisiti della clientela e del distributore, in modo da
minimizzare il costo totale del trasporto. La risoluzione dei problemi di tipo
VRP passa attraverso la loro modellazione su un grafo. La rete stradale e la rete
di servizio sono rappresentate da un grafo connesso G = (V, A), dove V è
l’insieme dei nodi ed A è l’insieme degli archi. I nodi del grafo rappresentano i
nodi stradali, i clienti ed il deposito. Ad ogni nodo-cliente è associata una
domanda di servizio. Gli archi rappresentano collegamenti tra i nodi; ad ogni
arco (i, j) ∈ A è associato un costo non negativo cij, che rappresenta il costo di
trasferimento dal nodo i al nodo j. In particolare, si ha che se la matrice dei costi
è simmetrica, cioè se cij = cji ∀(i, j) ∈ A , allora il corrispondente problema è
detto Symmetric CVRP (SCVRP); altrimenti se il grafo è diretto, la matrice dei
costi è asimettrica ed il corrispondente problema è detto Asymettric CVRP
(ACVRP). E’ da notare che in genere non è consentito l’uso di loop e ciò è
imposto definendo cii = +∞ ∀ i ∈ V.
Il CVRP può essere così formulato: dati una rete connessa G = (V, A), in cui ad
ogni arco (i, j) ∈ A è associato un costo (distanza) ci j , una flotta di K veicoli
identici di capacità C, un insieme N ⊂ V di clienti i, disposti su un sottoinsieme
di nodi e caratterizzati da una domanda di, ed un deposito localizzato sul nodo 0
della rete, determinare un insieme di K circuiti, ognuno corrispondente al
percorso di un veicolo, tali che ogni circuito transiti per il deposito, ciascun
cliente sia assegnato ad un unico giro, la somma delle domande associate ad
ogni circuito non ecceda la capacità C del veicolo e che il sistema di circuiti
copra tutti i clienti, in modo da minimizzare il costo (lunghezza) totale dei K
circuiti.
Definita la seguente variabile binaria:
1 se e solo se (i, j) appartiene al route del veicolo k
xkij =
(2.1)
0 altrimenti
26
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
il problema può essere così formulato:
min ∑
∑c
ij
xij (funzione obiettivo)
(2.2)
k∈K ( i , j )∈ A
con i seguenti vincoli:
∑∑ x
k
ij
= 1 ∀i ∈ V
(2.3)
k∈K j∈V
∑q ∑x
i
i∈V
∑x
k
ij
≤ C k ∀k ∈ K
(2.4)
j∈V
k
oj
= 1 ∀k ∈ K
(2.5)
k
ih
− ∑ x hjk = 0 ∀h ∈ A, ∀k ∈ K
(2.6)
j∈V
∑x
i∈V
∑x
j∈V
k
i , n +1
= 1 ∀k ∈ K
(2.7)
i∈V
xij ∈{0, 1} ∀i, j ∈ V
(2.8)
Il vincolo (2.2) impone che ogni cliente sia assegnato esattamente ad un solo
veicolo che lo serva; il vincolo (2.3) assicura che nessun veicolo possa servire
più clienti di quanti non permetta la sua capacità; il vincolo (2.4) impone che il
veicolo parta dal deposito; il vincolo (2.5) impone che il veicolo lasci il generico
nodo h solo se è entrato in tale nodo; il vincolo (2.6) impone che il veicolo torni
al nodo fittizio n+1: tale vincolo è ridondante, ma permette di sottolineare la
struttura dei route; infine il vincolo (2.7) definisce la natura binaria delle
variabili xkij.
Il CVRP è un problema NP-difficile, che generalizza il primo problema di
routing della storia: il Travelling Salesman Problem (TSP), che richiede di
determinare un circuito hamiltoniano di costo minimo che visiti tutti i vertici di u
grafo G. Infatti un’istanza CVRP con un solo veicolo (K = 1) e con capacità del
veicolo in grado di soddisfare l’intera domanda di servizio, si riduce ad
un’istanza di TSP.
2.4 Varianti del VRP
La molteplicità di problemi di tipo VRP è conseguente al tentativo di modellare
al meglio le numerose situazioni pratiche riconducibili ad un problema di
instradamento. Le diverse versioni del VRP si distinguono per modalità di
servizio, caratteristiche dei veicoli, struttura dei vincoli, sistema di obiettivi.
In relazione alla modalità di servizio, i clienti possono richiedere solo la
consegna di merce o solo il prelievo o entrambi.
27
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
Per quanto riguarda i veicoli, il servizio può essere svolto da uno o da più
veicoli, e nel caso di più veicoli questi possono essere identici o diversi; inoltre i
veicoli possono far riferimento ad un unico deposito o a più depositi.
I costi del servizio possono essere determinati in base solo alla lunghezza dei
percorsi, o in funzione di più parametri, come il numero dei percorsi, la
lunghezza complessiva del tragitto o il tempo di percorrenza.
I vincoli cui può essere soggetto il servizio sono molteplici e possono essere forti
o deboli, cioè rilassabili in qualche misura; tra i vincoli più frequenti si
ricordano:
•
veicoli con capacità limitata;
•
percorsi con lunghezza massima;
•
clienti con uno specifico arco temporale (time window) in cui deve essere
prestato il servizio;
•
clienti con priorità di servizio e con eventuale penalità in seguito alla
parziale o totale mancanza di servizio;
•
vincoli di precedenza definiti tra i clienti;
•
vincoli imposti dagli operatori relativi a orari, pause pranzo, straordinario.
Gli obiettivi della pianificazione possono essere molteplici e spesso contrastanti;
tipici obiettivi sono:
•
minimizzazione del costo globale del trasporto, che dipende dalla distanza
totale percorsa, dal tempo totale impiegato e dai costi fissi di veicoli ed
autisti;
•
minimizzazione del numero di veicoli ed autisti necessari per servire tutti i
clienti;
•
bilanciamento dei route, in termini di tempi di percorrenza e/o di carico dei
veicoli;
•
minimizzazione delle penali associate al parziale servizio fornito a parte dei
clienti;
•
minimizzazione di una funzione di costo che corrisponde ad una media
pesata di due o più delle funzioni precedenti.
Infine è da considerare che spesso può essere necessario considerare una
versione stocastica del problema, non essendo possibile conoscerne con certezza
l’intera caratterizzazione, in termine di vincoli e di clienti che devono essere
serviti.
28
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
2.5 Metodi risolutivi per il VRP
La maggior parte dei VRP sono problemi “difficili”, nel senso che per essi non si
conoscono algoritmi esatti con tempo di esecuzione polinomiale nella
dimensione del problema. Proprio in riferimento all’elevata complessità del
problema, gli approcci risolutivi possono essere di due tipi:
Procedure risolutive esatte, che cercano la soluzione ottima in tempi
esponenziali;
Procedure risolutive euristiche, che ricercano una soluzione approssimata
ma soddisfacente in relazione a opportuni criteri con tempi molto inferiori.
E’ da notare che conviene utilizzare algoritmi euristici, anziché esatti, in
particolare quando:
•
le dimensioni del problema sono eccessive rispetto a quelle risolvibili con
gli algoritmi esatti;
•
i problemi, anche se di dimensioni limitate, devono essere risolti in tempi
molto brevi;
•
i dati del problema sono approssimati e quindi non vale la pena di cercare
soluzioni esatte;
•
i problemi sono simili ma non identici a quelli affrontati dagli algoritmi
esatti: i metodi esatti sono molto meno generalizzabili dei metodi euristici;
•
i problemi sono dinamici, nel senso che le componenti sono una funzione
del tempo.
2.6 Procedure esatte per il VRP
Gli algoritmi esatti proposti per il VRP riescono a risolvere in modo esatto solo
istanze piccole (al massimo un centinaio di clienti con al più cinque veicoli) e
quindi in pratica si utilizzano quasi sempre algoritmi euristici. Tuttavia, lo studio
degli algoritmi esatti è utile, poiché permette una maggiore conoscenza della
natura del problema, alla luce della quale si possono sviluppare euristiche più
efficaci e valutare gli errori delle euristiche e dei rilassamenti.
I modelli di programmazione lineare che vengono utilizzati più di frequente per
una risoluzione esatta del VRP sono:
•
modelli vehicle-flow, in cui il problema viene formulato mediante l’utilizzo
di variabili intere, associate agli archi del grafo, che esprimono il numero di
volte in cui un singolo arco è attraversato da un veicolo; la formulazione
29
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
presentata in precedenza per il CVRP è un esempio di questo tipo di
modello;
•
modelli commodity-flow, che rappresentano i problemi mediante delle
variabili continue, associate agli archi del grafo, che rappresentano
l’ammontare di merce trasportata dai veicoli che percorrono gli archi stessi;
•
modelli set-partioning e set-covering, che rappresentano il problema con
un’ampia collezione di route ammissibili, ad ognuno dei quali è associata
una variabile decisionale binaria.
La risoluzione esatta del VRP procede applicando a questi modelli delle tecniche
di tipo Branch-and-Bound e Branch-and-Cut, ovvero mediante la generazione di
una partizione ricorsiva della regione ammissibile delle soluzioni (branching) e
la successiva risoluzione implicita (bounding) dei sottoproblemi generati dalla
partizione. In particolare la partizione viene rappresentata con una struttura ad
albero ed i bounds come etichette dei nodi. E’ da notare che l’efficienza di tali
tecniche dipende essenzialmente dalla scelta dei criteri di bounding per la
valutazione del limite inferiore, piuttosto che dai criteri di branching per la
generazione dei sottoproblemi.
2.7 Procedure euristiche classiche per il VRP
Gli algoritmi euristici classici permettono di fornire una soluzione di buona
qualità per un problema difficile come il VRP con un limitato tempo di calcolo.
Gli algoritmi euristici classici si possono classificare in tre grandi famiglie:
•
euristici costruttivi, che operano costruendo gradualmente una soluzione
ammissibile, cercando di contenere il costo totale della soluzione stessa;
•
euristici a due fasi, che operano componendo il problema in una fase di
suddivisione dei nodi in gruppi (clustering) ed in una fase di costruzione di
viaggi ammissibili (routing).
•
euristici migliorativi, che si applicano ad una soluzione preesistente, e non
necessariamente ammissibile, per cercare di migliorarla, in genere mediante
lo scambio di archi o nodi tra i diversi route.
Nella presentazione dei diversi metodi si farà riferimento al problema CVRP,
anche se gli stessi metodi, opportunamente riadattati, possono essere applicati
anche a problemi più vincolati.
30
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
2.7.1 Metodi costruttivi
Gli algoritmi euristici costruttivi costruiscono gradualmente una soluzione
ammissibile in base a criteri di ottimizzazione opportunamente scelti e coerenti
con l’obiettivo finale di minimizzazione dei costi, senza prevedere un
meccanismo di retroazione, che provveda ad un miglioramento della soluzione
corrente. La costruzione dei viaggi si basa su un criterio di aggregazione, cioè su
una funzione, definita per l’insieme dei clienti, che consente, ad ogni passo della
procedura, di determinare quale cliente aggiungere al percorso e in quale
posizione aggiungerlo. I criteri di aggregazione più noti sono:
•
risparmio (saving): il risparmio di costo derivante dalla fusione di due
viaggi distinti in un unico viaggio ammissibile; più precisamente dati due
route (0,…, i, 0) e (0, j,…, 0), se essi possono essere fusi in un unico route
ammissibile (0,…, i, j,…, 0) si ha un risparmio di costo (lunghezze) pari a sij
= ci0 + c0 j - cij, avendo indicato il deposito con 0.
•
distanza extra (extra mileage): la distanza aggiuntiva che occorre percorrere
per visitare il vertice aggiunto al percorso corrente; più precisamente dato
un route in cui sono già inseriti due nodi i e j, la distanza extra conseguente
all’aggiunta di un nodo k al route è data da m(k, i, j) = ck0 – cki + cij;
•
posizione radiale: angolo che il raggio congiungente il nodo da inserire con
il deposito forma con il raggio congiungente il deposito al nodo già inserito;
più precisamente dato un route in cui è già inserito il nodo i, la posizione
radiale, rispetto al nodo i ed al deposito 0, del nodo k da aggiungere è data
dall’angolo q(k, i) formato e dal raggio r(0, k) che congiunge il deposito 0 al
nodo k e dal raggio r(0, i) che congiunge il deposito al nodo i;
•
criteri misti: criteri che tengono conto di tutti i criteri precedentemente
descritti e anche della domanda di servizio qi del cliente i ed eventualmente
del numero n di clienti ancora da assegnare; i criteri così ottenuti sono tali
per cui tanto maggiori sono i valori dei termini s, 1/m, 1/n e qi ,tanto più
grande risulta il valore dell’indice del criterio.
La costruzione dei viaggi può seguire:
•
una modalità sequenziale, cioè viene costruito un viaggio alla volta fino
all’esaurimento dei vertici ed in nessun caso si può decidere tra più percorsi
in cui inserire un nodo;
•
una modalità parallela, cioè vengono costruiti più percorsi contemporaneamente ed il loro numero può essere fissato a priori o derivare dalla fusione
progressiva di percorsi più piccoli già calcolati.
31
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
Di seguito si riportano gli algoritmi costruttivi più noti.
1) Algoritmo dei Risparmi [Clarke e Wright]
L’algoritmo, applicabile ai problemi in cui il numero dei veicoli non è definito,
costruisce la soluzione del VRP attraverso la fusione dei percorsi esistenti in
base al criterio del risparmio. Questo algoritmo ha una versione parallela ed una
sequenziale, che hanno in comune lo stesso passo iniziale. L’algoritmo è così
sintetizzabile:
•
Passo 1 iniziale – Per ogni coppia di nodi i, j = 1,…, n, con i ≠ j, vengono
calcolati i savings sij = ci0 + c0 j - cij; quindi vengono generati n percorsi del
tipo (0, i, 0) per i = 1,…, n; infine i savings vengono ordinati in ordine
decrescente.
•
Passo 2 sequenziale – Si considera a turno ogni generico percorso (0, i,…, j,
0) e si determina il primo saving ski o sjl che consenta di fonderlo con un
altro percorso contenente l’arco (k, 0) o l’arco (0, l) per dar luogo ad un
nuovo percorso ammissibile; se questo passo va a buon fine si crea il nuovo
percorso con la fusione, altrimenti si applica questo passo al percorso
successivo; l’algoritmo termina quando non è più possibile effettuare alcuna
fusione.
•
Passo 2 parallelo – Si considerano i risparmi ordinati e si procede
determinando se è possibile fondere insieme due percorsi ammissibili
ottenendo un nuovo percorso ammissibile.
Questo algoritmo presenta le prestazioni migliori nella sua versione parallela,
anche se i risultati sono lontani dalle soluzioni ottime conosciute. E’ da notare
che l’algoritmo, in entrambe le versioni, produce viaggi iniziali vantaggiosi, ma
poi gli ultimi viaggi spesso sono molto lunghi.. Per ovviare a questo difetto, è
stato proposto l’utilizzo di un parametro di forma λ, che modifica i risparmi
secondo la formula: sij = ci0 + c0 j - λcij, per dare più enfasi alla distanza dei
vertici da connettere mediante valori maggiori di λ.
2) Algoritmo di Inserzione [Mole e Jameson]
L’algoritmo costruisce la soluzione del VRP attraverso l’espansione di un
viaggio in costruzione, scegliendo i nodi da inserire nel viaggio in base sia al
costo minimo di inserimento sia al risparmio massimo. In particolare, data una
terna di nodi (i, j, k), si definiscono le due funzioni:
α(i, k, j) = cik + ckj - λ cij
32
(2.9)
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
β(i, k, j) = µ c0k - α (i, k, j)
(2.10)
L’algoritmo si sviluppa seguendo tre passi fondamentali:
•
Passo 1 – Se esistono dei nodi liberi, si seleziona un generico nodo k tra
questi e si crea un viaggio emergente (0, k, 0); in caso contrario l’algoritmo
termina.
•
Passo 2 – Per ogni nodo k, si determinano, tra tutti i nodi r e s adiacenti al
viaggio emergente, i vertici ik e jk che minimizzano il costo di inserzione
ammissibile, cioè per i quali risulta α* (ik, k, jk) = min {α (r, k, s)}; se non
esiste alcuna inserzione ammissibile, si torna al passo 1, altrimenti si
sceglie, tra tutti i vertici che possono essere inseriti, il vertice k* che
massimizza il risparmio, cioè per il quale risulta β (ik*, k*, jk*) = max{β (ik,
k, jk) }e tale vertice viene inserito tra i vertici ik* e jk*.
•
Passo 3 – Si ottimizza il viaggio corrente con una procedura 3-opt, cioè si
effettua un cambiamento nel viaggio sostituendo casualmente tre archi che
lo compongono con tre nuovi archi anch’essi scelti a caso, nel rispetto della
connessione del viaggio stesso, e si riprende dal passo 2.
E’ da notare che i parametri λ e µ fanno da pesi, per cui la loro variazione
consente una diversa regola di inserimento.
3) Algoritmo di Inserzione Sequenziale [Christofides, Mingozzi e Toth]
L’algoritmo si sviluppa in due fasi, la prima sequenziale e la seconda parallela.
•
Passo 1 (inizio della fase sequenziale) – Si inizializza un indice di viaggio k
pari a 1;
•
Passo 2 – Si seleziona tra i nodi non ancora assegnati un generico nodo ik
per inizializzare il viaggio emergente k; per ogni nodo i non ancora
assegnato, si calcola δi = c0i + λ ci ik .
•
Passo 3 – Si determina nell’insieme Sk , costituito dai nodi liberi che
possono essere inseriti nel viaggio k in maniera ammissibile, il nodo i* che
minimizza il costo δi ,cioè il nodo i* per il quale risulta δi* = min i∈ Sk {δi }, e
si inserisce il nodo i* nel viaggio k; si ottimizza il viaggio k mediante una
procedura 3-opt; si ripete il passo 3, finché nessun altro nodo può essere
inserito nel viaggio k.
•
Passo 4 – Se tutti i nodi sono stati inseriti, la prima fase ha termine;
altrimenti si aggiorna l’indice k del viaggio, aumentandolo di un’unità, e si
torna al passo 2.
33
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
•
Passo 5 (inizio della fase parallela) – Si inizializzano K viaggi Rt = (0, it ,
0), con t = 1,…, K, essendo K il numero di viaggi ottenuti al termine della
fase sequenziale; l’insieme dei viaggi così inizializzati viene indicato con J
= {R1,…, RK }.
•
Passo 6 – Per ogni nodo i non ancora assegnato ad un viaggio e per ogni
viaggio Rt ∈ J, si calcola il costo εti = c0i + µ ci it ; si individua il viaggio Rt*
in corrispondenza del quale si minimizza il costo εti, cioè per il quale risulta:
εt*i = minRt∈ J {εti}; si associa il nodo i al viaggio Rt*; si ripete il passo 6
finché tutti i nodi sono associati ad un viaggio.
•
Passo 7 – Preso un qualsiasi viaggio Rt ∈ J, si pone J = J - {Rt }; per ogni
nodo i associato al viaggio Rt scelto, si calcolano i costi minimi εt’i = minRt∈
J
•
{εti} e le differenze τ i = εt’i -εt i .
Passo 8 – Si individua nell’insieme St, costituito dai nodi liberi associati al
viaggio Rt e che vi possono essere inseriti in maniera ammissibile, il nodo i*
che massimizza la differenza τ i, cioè il nodo i* per il quale risulti τ i* = maxi
∈ St {τi };
si inserisce il nodo i* nel viaggio Rt ; il viaggio così ottenuto viene
ottimizzato nuovamente con una procedura 3-opt, il passo 8 viene ripetuto
finché nessun altro vertice può essere inserito nel viaggio Rt .
•
Passo 9 – Se l’insieme J non è vuoto, si torna direttamente al passo 6; se,
invece, l’insieme J è vuoto e non tutti i nodi sono stati inseriti, vengono
creati nuovi viaggi a partire dal passo 1; se, infine, l’insieme J è vuoto e tutti
i nodi sono stati inseriti, l’algoritmo termina.
Questo algoritmo risulta essere migliore rispetto all’algoritmo di inserzione di
Mole e Jameson, in termini sia di soluzioni trovate sia di tempi di calcolo.
2.7.2 Metodi a due fasi
Gli algoritmi euristici migliorativi operano componendo il problema in una fase
di suddivisione dei vertici in gruppi (clustering) ed in una fase di costruzione di
viaggi ammissibili (routing).
In base all’ordine in cui vengono eseguite queste fasi, gli euristici migliorativi si
classificano in due categorie:
•
Algoritmi Cluster-First, Route-Second, che prima raggruppano i vertici in
cluster e poi determinano un route per ogni cluster;
34
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
•
Algoritmi Route-First, Cluster-Second, che prima creano un route su tutti i
vertici e poi lo suddividono.
Di seguito vengono presentati gli algoritmi di tipo Cluster-First, Route-Second
più noti: essi si differenziano sostanzialmente per il criterio di clustering
utilizzato.
1)
Algoritmo Sweep [Gillet e Miller ]
L’algoritmo procede prima raggruppando i nodi in cluster a seconda della loro
posizione angolare rispetto al deposito e poi risolvendo un’istanza TSP per ogni
cluster in modo esatto o approssimato. Quindi il criterio di clustering utilizzato è
di tipo geometrico: i cluster ammissibili vengono costruiti ruotando un raggio
variabile centrato sul deposito Alcune implementazioni prevedono che al
termine del procedimento i percorsi proposti vengano ottimizzati attraverso lo
scambio di nodi tra cluster adiacenti. Tale procedimento presuppone di
rappresentare ciascun nodo i, rispetto al deposito, con le sue coordinate polari (θi
, ρi ), dove θi rappresenta l’angolo e ρi la lunghezza del raggio; l’angolo θi è
calcolato rispetto al valore di riferimento θi* relativo ad un nodo arbitrario i*.
L’algoritmo si sviluppa secondo i seguenti passi:
•
Passo1 – Si numerano i nodi secondo valori crescenti di θi .
•
Passo 2 – Si seleziona un veicolo libero k.
•
Passo 3 – Si assegnano progressivamente i nodi al veicolo k, a partire dal
nodo libero con il minimo valore di θi , fino a quando non viene violato il
vincolo di capacità del veicolo. Eventualmente, ad ogni inserimento è
possibile ottimizzare la soluzione corrente con una procedura 3-opt. Se al
termine di questo passo ci sono ancora dei nodi liberi, s riprende
l’esecuzione a partire dal passo 2.
•
Passo 4 – Per ogni cluster così definito si risolve un’istanza TSP, in modo
esatto o approssimato.
2) Algoritmo Generalized Assigment Based [Fisher e Jaikumar]
L’algoritmo è applicabile solo quando è noto a priori il numero K dei veicoli.
L’algoritmo prima raggruppa i nodi in cluster risolvendo un’istanza di
assegnamento generalizzata (GAP), cioè in sostanza si attribuisce una
disponibilità di merce pari a Q a K vertici opportunamente scelti per
rappresentare i K viaggi e poi risolve il problema di assegnare i viaggi a tutti i
clienti del VRP in modo ottimo, senza violare i vincoli per i quali ogni nodo
35
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
deve essere assegnato ad un solo viaggio e la richiesta di merce a carico di ogni
veicolo deve essere al più pari alla capacità del veicolo stesso. L’algoritmo si
sviluppa secondo i seguenti passi:
•
Passo 1 – Si scelgono nell’insieme V dei vertici K vertici j1 ,…, jk per
inizializzare i K cluster.
•
Passo 2 – Per ogni vertice libero i si calcola il costo dik per la sua
allocazione nel cluster k, dato da: dik = min{c0,i + ci,jk + cjk,0, cjk,0 + cjk,i + ci,0}(c0,jk + cjk,0) .
•
Passo 3 – Si risolve un’istanza GAP con costi dij, richieste qi e disponibilità
Q.
•
Passo 4 – Per ogni cluster formato si risolve un’istanza TSP, in modo esatto
o approssimato.
E’ da notare che per il passo 1 di inizializzazione, gli stessi autori propongono di
suddividere il piano in K coni e di scegliere come vertici di inizializzazione K
vertici fittizi posti sulle bisettrici.
3) Algoritmo Location Based [Bramel e Simchi-Levi]
Questo algoritmo a due fasi prevede che la suddivisione dei nodi in cluster
avvenga attraverso la risoluzione di un’istanza Capacitated Plant Location
Problem (CPLP). Il CPLP si riferisce ad una situazione in cui un determinato
numero di clienti deve poter usufruire di un servizio attivabile in diverse
locazioni; ogni locazione ha un costo di attivazione e ogni collegamento utentelocazione, qualora possibile, ha un costo; ogni cliente quantifica espressamente
la propria richiesta di servizio. Il CPLP consiste nel determinare quali locazioni
fornitrici attivare e quali clienti assegnare a ciascuna locazione, in modo da
minimizzare la somma dei costi fissi e dei costi di collegamento. Nel caso
dell’algoritmo considerato, i clienti corrispondono ai clienti del VRP con la loro
richiesta di merce, le locazioni sono le posizioni dei nodi stessi e ogni locazione
ha associata una capacità massima pari alla capacità Q dei veicoli nel VRP.
4) Algoritmo di Branch and Bround troncato [Christofides, Mingozzi,Toth]
L’algoritmo è molto utile per la risoluzione di problemi con K variabili. Questa
procedura prevede la costruzione dell’albero di ricerca all’interno del quale ogni
livello contiene diversi viaggi ammissibili; nell’implementazione proposta si
effettua un solo branching ad ogni livello, mantenendo un solo viaggio
36
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
considerato come il migliore mediante un’opportuna funzione. L’algoritmo si
sviluppa seguendo quattro passi fondamentali.
•
Passo 1 – Indicato con V l’insieme dei nodi e con Fh l’insieme dei nodi non
ancora visitati al livello h, si pone h = 1 e Fh = V - {0 }.
•
Passo 2 – Se l’insieme Fh è vuoto, cioè se tutti i nodi sono visitati,
l’algoritmo ha termine; altrimenti si seleziona un nodo libero i ∈ Fh e si
genera un insieme Ri contenente viaggi generati da i e dagli altri nodi in Fh ,
costruiti tramite metodi basati sui risparmi e sui costi di inserimento.
•
Passo 3 – Si valuta ogni viaggio r ∈ Ri , mediante una funzione f (r) basata
sul costo di una buona soluzione al TSP sui nodi del viaggio e sul costo
dell’albero di copertura minimo sui nodi non ancora visitati.
•
Passo 4 – Si determina il viaggio r* ∈ Ri che minimizza la funzione di
costo, cioè il viaggio r* ∈ Ri per il quale risulta f (r* ) ≤ f (r) ∀ r ∈ Ri ; si
incrementa il valore di h, aumentandolo di una unità e si tolgono
dall’insieme Fh i nodi inseriti nel viaggio appena determinato; si torna al
passo 2.
Le prestazioni di questo algoritmo sono migliori di quelle dell’algoritmo sweep,
in termini sia di soluzioni ottenute sia di tempo di calcolo.
5) Algoritmi Petal
Questi algoritmi rappresentano la versione euristica del modello set-covering e
set-partioning.In sostanza, si generano alcuni viaggi, detti petal, e questi
vengono selezionati risolvendo un problema di set-partioning. Indicando con S
l’insieme dei viaggi generati, con xk una variabile binaria tale che xk = 1 se e solo
se il viaggio k appartiene alla soluzione, con aik una variabile binaria tale che aik
= 1 se e solo se il nodo i appartiene al viaggio k e con dk il costo del viaggio k, il
problema di set-partioning è del tipo: min Σk∈S (dk xk), con i vincoli:Σk∈S aik xk = 1
, ∀ i = 1,…,n e xk ∈ {0, 1}, ∀k ∈ S . Dal punto di vista del tempo di calcolo è da
notare che, se i viaggi corrispondono a cluster contigui di nodi, il problema può
essere risolto in tempo polinomiale. Dal punto di vista della qualità delle
soluzioni, si possono ottenere grossi vantaggi dalla generazione di due viaggi
accoppiati o intersecati (algoritmi 2-petal).
Gli algoritmi Route-First, Cluster-Second prima costruiscono un tour come
soluzione di un’istanza TSP su tutti i vertici del grafo in considerazione,
ignorando qualsiasi vincolo proprio del VRP, come ad esempio la capacità del
37
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
singolo veicolo; poi scompongono il tour in più percorsi tenendo presente i
vincoli imposti dal problema: questi percorsi rappresentano la soluzione finale
dell’istanza del VRP. E’ stato dimostrato che la seconda fase di ripartizione in
percorsi equivale a risolvere un’istanza di cammino minimo su di un grafo
aciclico e quindi può essere affrontata utilizzando, ad esempio, l’algoritmo di
Dijkstra in tempo O(n2). Nella pratica questi algoritmi non danno risultati
rilevanti.
2.7.3 Metodi migliorativi
Gli algoritmi euristici migliorativi si applicano ad una soluzione preesistente di
un’istanza di VRP per cercare di migliorarla, in genere mediante lo scambio di
archi o nodi tra i diversi percorsi.
Le strategie di miglioramento sono principalmente due:
•
modalità single-route, che cerca di migliorare un singolo percorso,
•
modalità multi-route, che cerca di migliorare l’intera soluzione mediante lo
scambio di nodi o archi tra diversi percorsi.
La maggior parte delle procedure di tipo single-route sono riconducibili al
meccanismo di λ-opt proposto da Lin: λ nodi sono rimossi dal percorso e per
ricomporre il percorso sono necessari λ nuovi collegamenti tra i nodi; nel
generare i vari schemi di riconnessione, la procedura termina in presenza di un
minimo locale quando non può essere effettuato nessun altro scambio utile.
2.8 Procedure metaeuristiche per il VRP
Gli algoritmi metaeuristici approfondiscono le ricerca della soluzione ottima del
VRP nelle zone più promettenti dello spazio delle soluzioni, mediante l’utilizzo
di sofisticate regole di ricerca e di ricombinazione dei risultati parziali ottenuti.
In particolare l’esecuzione di questi algoritmi è subordinata alla corretta
valutazione ed impostazione di un certo numero di parametri, per riuscire ad
adattare il metodo di risoluzione al problema in esame e ad ottenere la soluzione
migliore.Questi metodi permettono di ottenere soluzioni in genere di qualità
superiore rispetto a quelle ottenute con le procedure euristiche classiche, ma
richiedono tempi sensibilmente maggiori. Un’altra caratteristica che spesso
distingue gli algoritmi metaeuristici da quelli euristici classici è che il
procedimento di ricerca può passare attraverso soluzioni non ammissibili e fasi
non migliorative.
38
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
Per la risoluzione del VRP sono state proposte una serie di procedure
metaeuristiche, che possono essere raggruppate in sei categorie:
•
Simulated Annealing (SA);
•
Deterministic Annealing (DA);
•
Tabu Search (TS);
•
Algoritmi Genetici (GA);
•
Ant System (AS);
•
Reti Neurali (NN).
2.8.1 Simulated Annealing (SA)
L’approccio risolutivo alla base del metodo SA consiste nel partire da una
soluzione iniziale ammissibile xi e nel passare, ad ogni iterazione t, dalla
soluzione corrente xt alla soluzione migliore tra quelle appartenenti allo spazio
delle soluzioni vicine a xt (neighbourhood di xt ), fino a quando non risulta
soddisfatto il criterio di arresto.Più precisamente, il metodo prevede che, ad ogni
iterazione t, venga scelta casualmente una soluzione x appartenente al
neighbourhood di xt , N(xt ), se il costo associato alla soluzione x scelta è
inferiore alla soluzione xt, cioè se risulta che f(x) < f(xt ), avendo indicato con f(x)
il costo della soluzione, allora x diventa la nuova soluzione, cioè la soluzione
xt+1; altrimenti la nuova soluzione xt+1 è data da:
x con probabilità pt
xt+1 =
(2.11)
xt con probabilità 1 - pt
In genere pt è una funzione è decrescente di t e di [f(x)-f(xt)] ed è così definita:
pt = exp ([f(x)-f(xt)] / θ t )
dove θ
t
(2.12)
è un parametro proprio dell’algoritmo, chiamato temperatura alla
iterazio-ne t, che in genere è una funzione decrescente in t, per limitare la
probabilità che all’aumentare delle iterazioni venga scelta la soluzione peggiore.
La procedura termina quando viene soddisfatto un opportuno criterio; i criteri di
arresto possono essere:
•
nel corso degli ultimi cicli di iterazioni il valore f* della migliore soluzione
attuale non diminuisce di una percentuale prefissata;
•
nelle ultime iterazioni il numero di mosse accettate è inferiore ad una
percentuale prefissata;
•
il numero di iterazioni eseguite è pari ad un numero prefissato.
39
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
Algoritmi euristici di tipo SA per la risoluzione del VRP sono stati proposti da
Osman e testati su numerose istanze: l’algoritmo di Osman impiega tempi di
esecuzione relativamente lunghi per ottenere soluzioni discrete, ma comunque
lontane dall’ottimo.
2.8.2 Deterministic Annealing (DA)
L’approccio risolutivo generale alla base della tecnica DA è lo stesso del metodo
SA: la ricerca parte da una soluzione iniziale ammissibile xi e ad ogni iterazione
t, passa dalla soluzione corrente xt alla soluzione migliore tra quelle appartenenti
al neighbourhood di xt , fino a quando non risulta soddisfatto un opportuno
criterio di arresto. Le due tecniche si differenziano principalmente per il fatto
che nella procedura DA le mosse effettuate nello spazio delle soluzioni sono
scelte in base a regole deterministiche. Due implementazioni standard di questa
tecnica sono:
•
threshold accepting: ad ogni iterazione t, la soluzione xt+1 è accettata
solamente se f (xt+1) < f (xt ) + θ1 , essendo θ1 un parametro di soglia
controllato dall’utente;
•
record-to-record-travel: ad ogni iterazione t, la soluzione xt+1 è accettata
solo se f (xt+1) < θ2 f (xt ), essendo θ2 un parametro definito dall’utente e di
solito poco maggiore di 1.
L’implementazione record-to-record-travel in fase di test ha ottenuto ottimi
risultati per qualità della soluzione e soprattutto per tempi di calcolo.
2.8.3 Tabu Search (TS)
La tecnica Tabu Search, introdotta da Glover; è, tra le euristiche, quella più
efficace e promettente. Si tratta di una tecnica di ricerca locale dotata di
memoria, che permette di modificare l’aspetto dell’intorno in cui si concentra la
ricerca e le modalità del processo di ricerca stessa. Più precisamente, la ricerca
della soluzione migliore parte da una soluzione iniziale ammissibile e procede
esplorando un sottoinsieme, opportunamente delineato, dello spazio delle
soluzioni ammissibili vicine alla soluzione corrente. La tecnica prevede di
memorizzare la storia del processo di ricerca, cioè la successione delle
configurazioni che il sistema incontra, mediante strutture di memoria flessibile
basate su attributi. Questo insieme di informazioni permette di individuare il
40
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
campo di soluzioni più promettenti su cui focalizzare la ricerca, di imporre al
processo delle regole che stabiliscano l’ammissibilità delle mosse tra le varie
soluzioni, e di far seguire al processo delle opportune strategie di ricerca. Questo
meccanismo è rivolto ad evitare che la ricerca della soluzione migliore sia
caratterizzata da cicli o da stazionamenti in un intorno di minimo locale.
Le buone soluzioni recentemente visionate sono marcate da un attributo, che le
rende non selezionabili nelle iterazioni successive: le soluzioni marcate sono
appunto dette soluzioni tabu. La soluzione marcata rimane proibita per un
intervallo di tempo variabile e lo stato della soluzione marcata può cambiare se
si verificano eventi particolari. Le mosse eseguibili dal processo di ricerca, cioè i
passaggi dalla configurazione corrente alla successiva, sono limitate da
opportune regole, dette tabu restriction, che servono per escludere la scelta di
una mossa che vada ad annullare gli effetti prodotti da una mossa precedente. Il
meccanismo di controllo che guida il processo di ricerca è costituito da due
componenti principali: i criteri di aspirazione, che servono per determinare
quando le tabu restriction possono essere violate e la memoria basata sulla
frequenza di un evento, che fornisce informazioni per determinare le mosse
migliori tra una serie di alternative possibili e per introdurre nel processo di
ricerca una eventuale funzione di penalizzazione. La ricerca nello spazio delle
soluzioni ammissibili viene indirizzata mediante opportune strategie: le strategie
di intensificazione servono ad incoraggiare l’uso di buoni attributi per creare
nuove soluzioni; le strategie di diversificazione tendono a generare nuove
soluzioni, attraverso la combinazione di attributi legati a configurazioni molto
diverse tra loro, per indagare nelle regioni del dominio non ancora esplorate.
Tra le numerose tecniche di tipo TS applicate a problemi VRP, se ne riportano
due ritenuti molto interessanti per i risultati ottenuti.
1) Memoria Adattativa [Rochat, Taillard, 1995]
Il processo di ricerca viene reso più sofisticato mediante l’introduzione di
memoria adattativa, cioè di una struttura dati contenente buone soluzioni, che
viene dinamicamente aggiornata attraverso il processo di ricerca: periodicamente
da questa struttura sono estratte delle soluzioni che vengono combinate tra loro
per creare nuove buone soluzioni. In particolare per il VRP la combinazione di
soluzioni diverse prevede l’estrazione e la ricombinazione di interi route; ma
questo pone delle difficoltà, nel senso che se dalla memoria vengono estratti i
route migliori per essere ricombinati, questi devono essere necessariamente
41
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
disgiunti, cioè non devono avere nodi in comune; e quindi la ricombinazione
produce dei route diversi che coprono porzioni limitate di nodi e perciò è
necessario il reinserimento dei nodi esclusi mediante l’utilizzo di una procedura
euristica costruttiva. L’introduzione di memoria adattativa nei metodi di ricerca
ha permesso di ottenere alcuni dei migliori risultati noti sulle istanze più
studiate.
2) Granular Tabu Search [Toth, Vigo, 1998]
Questa strategia di ricerca si basa sull’osservazione che nelle migliori soluzioni,
ottenute con altri metodi, gli archi più lunghi del grafo hanno in genere una
bassa probabilità di appartenere alla soluzione ottima. Da qui l’idea di escludere
a priori dalla procedura gli archi la cui lunghezza supera una certa soglia, detta
soglia di granularità, in modo che il processo di ricerca non consideri mai le
soluzioni meno promettenti. La soglia proposta dagli autori è definita da: v = β
c , dove c è la lunghezza media degli archi in una soluzione ottenuta da una
procedura euristica veloce, mentre β è un parametro di sparsificazione che
determina la percentuale di archi da considerare, che in genere è scelto
nell’intervallo [1, 2], in modo da considerare solo il 10-20% degli archi e il cui
valore viene aggiornato dinamicamente tutte le volte che la soluzione rimane
invariata per un certo numero di iterazioni. Le soluzioni del neighbourhood sono
ottenute mediante un limitato numero di scambi di nodi all’interno dello stesso
viaggio o tra viaggi distinti. La procedura proposta dagli autori prevede di
esaminare tutti i possibili scambi in tempo O(|E(v)|, essendo E(v) = {i, j∈E : cij <
v} ∪ I, dove I è un insieme di archi ritenuti importanti, come quelli incidenti il
deposito o
appartenenti a
buone
soluzioni
calcolate in
precedenza.
L’implementazione del GTS permette di ottenere ottime soluzioni con tempi di
esecuzione tra i più bassi nella categoria Tabu Search.
2.8.4 Algoritmi genetici
Un algoritmo genetico è un metodo di risoluzione dei problemi, che considera un
numero limitato di informazioni sul problema in esame e che procede imitando i
processi tipici dell’evoluzione naturale. La tecnica base consiste nel mantenere
memoria di stringhe di bit, dette cromosomi, che rappresentano la codifica
binaria di una soluzione del problema. L’evoluzione della popolazione di
cromosomi è ottenuta applicando degli operatori che simulino i più importanti
fenomeni naturali di riproduzione e mutazione. Più specificatamente, si definisce
42
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
{
}
una popolazione iniziale di cromosomi X1 = x11 ,..., x 1N , e ad ogni iterazione t =
1,…,T, sono applicate k volte le operazioni descritte dai passi 1-2-3, seguite dal
passo 4:
•
Passo 1 (Riproduzione) – Si selezionano dalla popolazione Xt due
cromosomi
generatori,
privilegiando
statisticamente
la
scelta
dei
cromosomi migliori;
•
Passo 2 (Ricombinazione) – Si applica un operatore di scambio ai due
generatori in modo da ottenere una coppia di cromosomi discendenti;
•
Passo 3 (Mutazione) – Si applica un operatore di mutazione casuale ai
cromosomi discendenti.
•
Passo 4 (Rinnovo generazionale) – A partire dalla popolazione corrente X t,
si crea la popolazione X
t+1
, rimuovendo le 2k peggiori soluzioni e
sostituendo-le con le 2k generate nelle k precedenti applicazioni dei passi 12-3.
Al termine delle T iterazioni, si prende come soluzione finale la migliore
dell’ultima generazione.
Questa tecnica è assolutamente generale e può essere applicata per la risoluzione
di diverse tipologie di problemi. Gli aspetti critici di questa tecnica sono la
definizione degli operatori di scambio e di mutazione, che dipende dal tipo di
problema affrontato, e la codifica di una soluzione in una stringa di bit, che
richiede una serie di regole per stabilire l’ammissibilità delle soluzioni. Nel caso
specifico dei problemi di VRP, i route che compongono una soluzione non sono
codificati in una stringa di bit, ma in una sequenza di numeri interi, in modo che
ogni intero rappresenti un determinato nodo e la posizione dell’intero nella
sequenza indichi l’ordine di visita del nodo corrispondente nel route. In
particolare l’intero 0, rappresentante il deposito, può comparire più volte nella
sequenza ed è spesso utilizzato come carattere separatore tra i route. Per la
struttura dati così definita, anche gli operatori di scambio e di mutazione devono
essere definiti in maniera specifica: per quanto riguarda le operazioni di
scambio, uno degli operatori più noti per il TSP, ma facilmente applicabile
anche al VRP, è l’operatore order crossover definito da Oliver, Smith e Holland;
mentre per le operazioni di mutazione sono stati proposti degli schemi di
scambio o di rimozione e reinserimento (schemi RAR , Remove And Reinsert). A
livello di applicazioni pratiche, questi algoritmi hanno dato i maggiori contributi
per la risoluzione di istanze più vincolate rispetto al CVRP.
43
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
2.8.5 Ant System
Questa strategia di risoluzione si rifà alla tecnica usata dalle formiche per la
ricerca di cibo. Questi insetti, infatti, durante la ricerca di cibo marcano il
cammino tramite la secrezione di una sostanza, il feromone, riconoscibile da tutti
i loro simili, con una quantità che non è casuale, ma che dipende dalla qualità
della fonte di cibo raggiungibile e dalla lunghezza del percorso. In questo modo
nel corso del tempo sono delineati i percorsi più convenienti per
l’approvvigionamen-to di cibo. Analogamente, in questa categoria di
metaeuristici la ricerca della soluzione migliore si basa sui valori della funzione
obiettivo, che rappresentano la qualità della soluzione e sui valori della memoria
adattativa, che tengono traccia dei percorsi più convenienti. Più precisamente, ad
ogni arco (i, j) del grafo sono associati due valori: la visibilità ni j, che è un
valore costante pari all’inverso della lunghezza dell’arco e la traccia di feromone
Γi j, che è un valore aggiornato dinamicamente durante l’esecuzione della
procedura. Ad ogni iterazione, partendo da ogni vertice, si costruiscono dei
viaggi utilizzando un metodo euristico che favorisca il collegamento di vertici
vicini o di vertici connessi ad archi con un alto valore di Γi j.Alla fine di ogni
iterazione vengono aggiornati i valori di Γi
j
per evitare soluzioni di scarsa
qualità; in particolare, in riferimento ad un arco (i, j) del viaggio k avente
lunghezza Lk , il valore di Γi j viene diminuito di una frazione pari a (1-p), con 0
≤ p ≤ 1 e viene aumentato di una frazione che dipende dalla lunghezza del
viaggio k e dal numero totale N di viaggi, nel modo seguente:
N
Γij = pΓij + ∑ (1 / Lk )
(2.13)
k =1
Le applicazioni di questo metodo al VRP sono relativamente poche, e hanno
dato risultati interessanti, anche se non confrontabili con quelli ottenuti con gli
altri metaeuristici.
2.8.6 Reti Neurali
Le Reti Neurali sono dei modelli computazionali la cui struttura è composta da
diverse unità di elaborazione elementari, collegate tra loro da connessioni pesate:
ciascuna cella di elaborazione è collegabile alle altre, i collegamenti sono
modulati in base al peso della connessione ed il valore del peso associato alle
connessioni varia dinamicamente nel tempo in funzione dell’esperienza acquisita
durante la computazione. Gli algoritmi di questo tipo cercano di migliorare la
44
Capitolo 2 – Algoritmi euristici per il Vehicle Routing Problem
soluzione trovata mediante tecniche, più o meno complesse, di machinelearning: la computazione nel suo procedere permette di acquisire una
conoscenza del problema sempre più approfondita e questa va ad arricchire la
computazione stessa, creando così un processo di avvicinamento progressivo
alla soluzione migliore. L’applicazione di questi metodi al VRP ha dato risultati
discreti, anche se non confrontabili con quelli ottenute dalle altre metaeuristiche.
45
46
CAPITOLO 3
Modello di pianificazione
3.1 Descrizione del problema
L’ottimizzazione dei percorsi di raccolta dei rifiuti solidi urbani nella zona
periferica del comune di Ravenna è stata realizzata mediante l’applicazione di
una procedura euristica di ottimizzazione, sviluppata presso il Dipartimento di
Elettronica, Informatica e Sistemistica (DEIS) della Facoltà di Ingegneria
dell’Università di Bologna e opportunamente adattata al problema specifico in
esame.
Il problema affrontato può essere posto nei seguenti termini: data una
popolazione di cassonetti, dei quali è nota la posizione sulla rete stradale e la
domanda di servizio e data una flotta dei veicoli, dei quali sono note le capacità,
stabilire l’insieme dei viaggi da effettuare, all’interno di un orizzonte temporale
di riferimento, per servire l’intera popolazione di cassonetti, rispettando i vincoli
operativi imposti, al fine di minimizzare il costo complessivo del servizio.
Il problema appartiene alla categoria ACVRP (Asymmetric Capacitated Vehicle
Routing Problem) e viene trattato più specificatamente come CNRP
(Capacitated Node Routing Problem).
3.2 Descrizione del modello
La risoluzione del problema di ottimizzazione dei percorsi richiede la
delineazione di un opportuno modello di pianificazione, che prevede la
realizzazione di:
un modello di rete stradale, che rappresenta la rete di trasporto e di
servizio;
un modello dati che sintetizza le informazioni più importanti.
Punto di partenza per la costruzione del modello di pianificazione sono i sistemi
aziendali di database geografici del tipo GIS (Geographic Information System),
dai quali è possibile ricavare le informazioni necessarie, cioè la rappresentazione
completa della rete stradale e della popolazione dei cassonetti.
47
Raccolta ed
Elaborazione
di Dati
Database di:
Punti Raccolta
Nodi Stradali
Archi
Veico li
Parametri
Obiettivi
ALGORITM O DI
OTTIMIZZAZIONE
Vincoli
Risultati in output:
Viaggi da co mpiere
Indicatori prestazionali
FINE
soddisfacente
insoddisfacente
Figura 3.1 Schema del modello di pianificazione
3.3 Modello della rete stradale
La rete stradale è rappresentata mediante un modello di tipo Node Routing, cioè
mediante un grafo in cui i nodi rappresentano i punti di domanda di servizio
(punti raccolta), i punti di riferimento del trasporto (deposito e discarica) ed i
nodi stradali (incroci stradali e fine di strade) e gli archi rappresentano i
collegamenti tra i nodi. Più precisamente, si utilizza un grafo misto, pesato e
asimmetrico, del tipo G = (V, A ∪ E), dove V è l’insieme dei nodi, A è l’insieme
degli archi orientati ed E è l’insieme degli archi non orientati. In particolare,
sono modellati come archi orientati, cioè archi (i, j) che rappresentano un
collegamento diretto dal nodo iniziale i al nodo finale j, i tratti stradali a senso
unico ed i tratti stradali in cui è presente un punto raccolta, in modo che il
cassonetto si trovi sul lato destro rispetto al senso di percorrenza ammesso. Ad
ogni arco è associato un costo, rappresentato dalla lunghezza del tratto stradale
48
corrispondente. Il grafo è asimmetrico poiché numerosi sono i casi in cui la
lunghezza del tragitto per spostarsi da un nodo i ad un nodo j non coincide con la
lunghezza del tragitto inverso.
Il processo di costruzione del grafo, si sviluppa, a partire dalla rete stradale reale,
nelle seguenti fasi:
1) individuazione dei tratti stradali ammissibili;
2) raggruppamento dei cassonetti in punti raccolta;
3) rappresentazione del deposito e della discarica con nodi;
4) conversione dei punti raccolta in nodi;
5) verifica del rispetto dei vincoli.
Innanzitutto è necessario individuare, tra tutti i tratti stradali della zona oggetto
di pianificazione, i tratti da non considerare, ovvero le strade che non possono
essere percorse dai veicoli per motivi logistici e le strade ritenute per esperienza
non convenienti, cioè fondamentalmente le strade del centro città; questa
selezione è stata condotta su indicazione del personale di HERA. I cassonetti
dello stesso tratto stradale e vicini tra loro sono raggruppati in un unico punto
raccolta. Il deposito e la discarica del servizio sono associati ai nodi a loro più
prossimi. La rappresentazione dei punti raccolta mediante nodi è la fase più
complessa. Nel database aziendale, infatti, i cassonetti sono associati agli archi
stradali su cui sono posti, mentre il modello di grafo richiede che i punti di
domanda del servizio siano rappresentati da nodi. E’ quindi necessario
modificare la rete stradale, o meglio modificare tutti gli archi stradali su cui sono
posizionati dei cassonetti, mediante l’introduzione di archi fittizi, in modo che i
punti raccolta siano rappresentati da nodi e coerentemente con il fatto che il
veicolo può svuotare solo i cassonetti che si trovano a destra rispetto al suo
senso di marcia. Dai database geografici di HERA si ricavano tutte le
informazioni necessarie per effettuare questa modifica, ovvero per ogni
cassonetto il tratto stradale di appartenenza, il lato strada in cui è posizionato e le
coordinate della sua posizione e per ogni tratto stradale i nodi iniziale e finale, la
lunghezza e la modalità di percorrenza. E’ da notare che il lato su cui si trova il
cassonetto è definito rispetto al nodo iniziale della strada e che i cassonetti posti
su dei sensi unici sono posizionati in modo da trovarsi sul lato destro della strada
rispetto al senso di percorrenza permesso. Le modalità di modifica dipendono
dalla modalità di percorrenza del tratto stradale, cioè se è a doppio senso (arco
bidirezionale) o a senso unico (arco unidirezionale) e dal lato strada in cui si
trova il cassonetto; in relazione a ciò si possono distinguere quattro casi:
49
a) arco bidirezionale con un punto raccolta sul lato destro;
b) arco bidirezionale con un punto raccolta sul lato sinistro;
c) arco bidirezionale con un punto raccolta sul lato destro e un punto raccolta
sul lato sinistro;
d) arco unidirezionale con un cassonetto sul lato destro.
Nel caso di un arco a doppio senso a di nodo iniziale N1 e di nodo finale N2 e di
lunghezza L con un punto raccolta P posto sul lato destro di a rispetto a N1,
l’arco a viene scomposto in tre archi:
•
un arco k1 orientato da N1 a P, di lunghezza L1 determinata in base alle
coordinate del punto raccolta;
•
un arco k2 orientato da P a N2, di lunghezza L2 pari alla differenza (LL1);
•
un arco k3 orientato da N2 a N1, di lunghezza L.
La figura seguente illustra questa scomposizione.
k3
a
N1
N2
N1
N2
P
k1
k2
P
Figura 3.2 Scomposizione di un arco su cui è presente un cassonetto
La figura seguente illustra la corrisponde modifica alla struttura dati.
ID_PUNTO ID_ARCO X_COORD Y_COORD LATO
P
XP
a
YP
destro
ID_ARCO NODO_INIZ NODO_FIN LUNGHEZZA TIPO_ARCO
a
N1
N2
L
bidirezionale
ID_ARCO NODO_INIZ NODO_FIN LUNGHEZZA TIPO_ARCO
k1
N1
P
L1
unidirezionale
k2
P
N2
L2
unidirezionale
k3
N2
N1
L
unidirezionale
Figura 3.3 Modifiche apportate alla struttura dati
50
Nel caso di un arco a doppio senso a di nodo iniziale N1 e di nodo finale N2 e di
lunghezza L con un punto raccolta P posto sul lato sinistro di a rispetto a N1,
l’arco a viene scomposto in tre archi:
•
un arco k1 orientato da N2 a P, di lunghezza L1 determinata in base alle
coordinate del punto raccolta;
•
un arco k2 orientato da P a N1, di lunghezza L2 pari alla differenza (LL1);
•
un arco k3 orientato da N1 a N2, di lunghezza L.
Nel caso di un arco a doppio senso a di nodo iniziale N1 e di nodo finale N2 e di
lunghezza L con un punto raccolta P1 posto sul lato destro e un punto raccolta
P2 posto sul lato sinistro di a rispetto a N1, l’arco a viene scomposto in quattro
archi:
•
un arco k1 orientato da N1 a P1, di lunghezza L1 determinata in base
alle coordinate del punto raccolta P1;
•
un arco k2 orientato da P1 a N2, di lunghezza L2 pari a (L - L1);
•
un arco k3 orientato da N2 a P2, di lunghezza L3 determinata in base
alle coordinate del punto raccolta P2;
•
un arco k4 orientato da P2 a N1, di lunghezza L4 pari a (L – L3).
Nel caso di un arco unidirezionale a di nodo iniziale N1 e di nodo finale N2 e di
lunghezza L con un punto raccolta P posto sul lato destro, l’arco a viene
scomposto in due archi:
•
un arco k1 orientato da N1 a P, di lunghezza L1 determinata in base alle
coordinate del punto raccolta P;
•
un arco k2 orientato da P a N2, di lunghezza L2 pari a (L - L1).
Questo processo di modifica è stato realizzato in modo semiautomatico, dal
sistema informatico aziendale ed in particolare grazie all’utilizzo delle
funzionalità dei sistemi GIS.
Una volta realizzata la conversione dei punti raccolta in nodi, la rete così
ottenuta è stata modificata manualmente in corrispondenza di quei punti soggetti
a particolari vincoli, in base al suggerimento del personale di HERA; in
particolare la correzione si è focalizzata su alcuni tratti stradali critici che non
permettono in alcun modo un’inversione di marcia del veicolo.
51
3.4 Modello dati
I dati che caratterizzano il problema sono molteplici e spesso non disponibili. E’
necessario, quindi, fare una selezione per considerare solo i dati ritenuti più
significativi nel caso specifico e applicare ipotesi semplificative per ricavare i
dati importanti non disponibili. I dati che caratterizzano il problema vengono
elencati in riferimento alle entità del modello: cassonetti, punti raccolta, archi,
nodi, veicoli ed operatori. Per ognuno di essi è stato creato un database che
riporta le principali informazioni.
3.4.1 Cassonetti
Si è creato un database dei cassonetti, in cui ogni cassonetto è identificato da un
codice del tipo Ck e dal reparto di raccolta a cui appartiene nell’attuale
organizzazione del servizio e in cui sono presenti le informazioni più importanti,
che sono in seguito illustrate.
•
Capacità Volumetrica [m3], cioè la massima quantità in volume di rifiuti
che può essere contenuta in un cassonetto: questa informazione è
immediatamente ricavabile dal tipo di cassonetto.
•
Capacità Massica [kg], cioè la massima capacità in massa di rifiuti che può
essere contenuta in un cassonetto: questo dato si ricava moltiplicando la
capacità volumetrica [m3] per la densità media dei rifiuti solidi urbani
[kg/m3]; in particolare, per i rifiuti solidi urbani indifferenziati, la letteratura
specifica indica un valore di circa 300 kg/m3.
•
Riempimento Medio Giornaliero [kg/g], cioè il livello di carico giornaliero
dei cassonetti: questo dato è determinato con una certa approssimazione.
•
Periodo di Svuotamento [gg], cioè il numero di giorni che devono
intercorrere tra due svuotamenti di un cassonetto: tale dato si ricava in base
alla legge di riempimento ricavata, dividendo la capacità massica del
cassonetto per il suo riempimento medio giornaliero.
•
Frequenza di Svuotamento [1/gg], cioè ogni quanti giorni va svuotato un
cassonetto: questo dato è pari al reciproco dell’intervallo di svuotamento.
•
Frequenza di Svuotamento Imposta [1/gg], cioè la frequenza di
svuotamento imposta dagli standard di qualità del servizio, che impongono
di svuotare i cassonetti prima che raggiungano la capacità massima. Questo
parametro rappresenta una soglia minima non oltrepassabile dalla frequenza
di svuotamento del singolo cassonetto.Nel caso in esame la frequenza
imposta è pari a 1/3gg.
52
•
Collocazione,
cioè
le
coordinate
spaziali
del
cassonetto:
questa
informazione si è ricavata direttamente dal sistema GIS aziendale.
•
Tempo di Svuotamento Medio [sec], cioè il tempo medio necessario per
svuotare un cassonetto: questo dato è stato assunto pari a 60 sec.
La determinazione del riempimento medio giornaliero dei cassonetti si basa sulla
analisi dei dati raccolti in relazione all’intera popolazione di cassonetti. Avendo
a disposizione un certo numero di pesate effettuate nelle raccolte, il riempimento
medio giornaliero RMGk del generico cassonetto k è determinato mediando i
valori dei riempimenti medi giornalieri di tutte le raccolta, come:
n
∑ RMG
RMGk =
i
k
i =1
(3.1)
n
essendo n il numero totale delle pesate a disposizione e RMGki il riempimento
medio giornaliero del cassonetto k in riferimento alla raccolta i-esima, dato da:
RMGki =
Q _ raccki
N _ giorni i
(3.2)
essendo Q_raccki la quantità in chili di rifiuto presente nel cassonetto k nel corso
della raccolta i e N_giornii i giorni trascorsi dallo svuotamento precedente.
In genere, come valore di RMGk viene considerato solo il valore medio della
distribuzione, anche se il numero dei campioni analizzati è piuttosto scarso
rispetto al problema in questione; di conseguenza è opportuno un continuo
monitoraggio dell’andamento delle raccolte, per integrare i dati a disposizione
con tutti i nuovi eventualmente disponibili.
Una volta determino RMGk, è possibile ricavare il periodo di svuotamento Pk per
ogni cassonetto k, cioè il numero di giorni che possono trascorrere tra due
svuotamenti consecutivi, mediante la:
Pk =
CM k
RMGk
(3.3)
dove CMk indica la capacità in chili del cassonetto k.
La frequenza di svuotamento di ogni cassonetto è data dall’inverso del periodo.
3.4.2 Punti raccolta
Un punto raccolta è costituito da uno o più cassonetti. Si è creato un database dei
punti raccolta, in cui ogni punto raccolta è identificato da un codice del tipo Pn e
in cui sono contenute tutte le informazioni ritenute necessarie.
53
•
Numero dei cassonetti che costituiscono la postazione di raccolta, con
l’indicazione degli attributi identificativi dei cassonetti stessi;
•
Domanda di servizio, cioè la quantità attesa di rifiuti del punto raccolta,
calcolata come la somma dei riempimenti medi giornalieri dei cassonetti
appartenenti al punto, moltiplicata per il numero dei giorni trascorsi dal
precedente servizio.
•
Periodo di svuotamento, cioè il numero massimo di giorni che possono
trascorrere tra due svuotamenti successivi del punto, che è determinato in
base ai periodi di svuotamento dei cassonetti della postazione ed è pari al
minimo di questi valori.
•
Frequenza di svuotamento, che è data dal reciproco del periodo di
svuotamento del punto ed è pari al massimo delle frequenze di svuotamento
dei cassonetti appartenenti al punto stesso.
Nel caso specifico del problema in esame, i punti raccolta sono tutti
caratterizzati dallo stesso profilo di servizio, che richiede una frequenza
settimanale di svuotamento pari a due svuotamenti per settimana ed un intervallo
massimo tra due svuotamenti successivi pari a tre giorni.
3.4.3 Archi
Ogni arco è stato identificato da un codice del tipo An_ kn I database che
raccolgono le informazioni sugli archi sono il risultato della raccolta dei dati
disponibili nel sistema informatico aziendale dalla loro successiva elaborazione
mediante il processo di creazione della rete di trasporto precedentemente
descritto.
Per ogni arco è necessario conoscere le seguenti informazioni.
•
Estremo iniziale ed estremo finale, cioè i nodi iniziale e finale dell’arco:
questi dati sono ricavabili direttamente dalla rappresentazione della rete
stradale disponibile nel sistema informatico aziendale.
•
Modalità di percorrenza, cioè se l’arco è percorribile in entrambi in sensi di
marcia o meno: questa informazione deriva dal processo di costruzione della
rete di trasporto.
•
Lunghezza, che è stata ricavata dal database aziendale.
•
Tipo di strada, cioè se è una strada privata, comunale, provinciale, o statale,
al quale è associato la velocità di attraversamento.
54
•
Velocità di attraversamento, cioè una indicazione sulla velocità media che
può essere tenuta dal veicolo in un certo arco. La sua determinazione si basa
sulle indicazioni degli operatori del servizio.
Più specificatamente, i tratti stradali, e quindi gli archi che le rappresentano,
sono state classificate in private, comunali, provinciali e statali ed ad ogni tipo è
stato associato un valore della velocità media di percorrenza di rispettivamente
20, 35, 50 e 55 km/h.
3.4.4 Nodi
Un nodo rappresenta un incrocio stradale, la terminazione di una strada senza
uscita o un punto intermedio di una strada. Per ogni nodo è necessario
conoscere:
•
Codice, che lo identifica in modo univoco;
•
Coordinate Geografiche, ricavate direttamente dal database aziendale.
3.4.5 Veicoli
Per ogni veicolo della flotta è necessario conoscere:
•
Numero dei veicoli disponibili, che nel caso specifico è pari a quattro;
•
Tipologia: in questo caso tutti i veicoli sono dello stesso tipo, cioè sono dei
compattatori a caricamento laterale;
•
Capacità Volumetrica [m3], cioè il volume del cassone del veicolo;
•
Portata [kg], cioè la quantità massima di rifiuti trasportabili dal veicolo:
questo valore è pari a 11.000 kg.
•
Costo orario di utilizzo [€/h]: questo dato è pari a 32,00 €/h,
•
Tempo in discarica [s], cioè il tempo necessario per eseguire le operazioni
di pesatura, svuotamento e pulitura del veicolo in discarica: questo dato è
assunto pari a 45min, cioè 2.700s.
3.4.6 Operatori
Per gli operatori che eseguono il servizio è necessario conoscere:
•
Numero di operatori disponibili;
•
Numero degli operatori per ogni veicolo: ogni veicolo richiede un solo
operatore;
•
Durata ordinaria del turno di lavoro, cioè il tempo ordinario che un
operatore ha per svolger il servizio: il turno di lavoro è pari a 6 ore.
55
•
Durata massima del lavoro straordinario, cioè lo straordinario massimo
ammesso: lo straordinario può essere al più di un’ora;
•
Durata della pausa: la pausa è di 15 minuti.
•
Costo orario ordinario: 24,00 €/h;
•
Costo orario straordinario: 31,20 €/h.
Poiché ad ogni veicolo è associato un operatore, questi dati vengono attribuiti
direttamente al veicolo.
3.5 Vincoli del problema
I vincoli operativi imposti dal problema sono volti al rispetto dei limiti di
capacità e di disponibilità dei veicoli. Più precisamente, la creazione dei viaggi
deve rispettare i vincoli di seguito illustrati.
•
Ogni punto di raccolta, contenente uno o più cassonetti, deve essere servito
interamente da uno stesso veicolo; ciò implica che la scelta del nuovo punto
di raccolta da inserire nel viaggio deve essere accompagnata dalla
valutazione che tutti i cassonetti del punto di raccolta considerato possano
essere svuotati interamente. Indicando, quindi, con Di la domanda presente
nel punto di raccolta i, con Qk la capacità massima del veicolo k, con Qracck
la quantità di rifiuti già raccolta dal veicolo k prima di servire il punto di
raccolta i e con Qresk la capacità residua del veicolo k, data dalla differenza
tra Qk e Qracck, questo vincolo si traduce nella condizione:
Qresk ≥ Di ∀i, k
•
(3.4)
La quantità totale dei rifiuti raccolti non deve superare la capacità massima
del veicolo; utilizzando la notazione precedente, questo vincolo si traduce
nella condizione:
Qresv (t) ≥ 0 ∀t
•
(3.5)
La durata di ogni viaggio non deve superare una durata massima
ammissibile, ciò per ricorrere il meno possibile a lavoro straordinario. Come
durata massima ammissibile di ogni viaggio si assume la durata massima
del servizio, Tmaxservizio, pari alla somma della durata ordinaria del
servizio (otto ore giornaliere) e della durata massima del servizio
straordinario (quattro ore giornaliere); mentre la durata del generico viaggio
l , Tdl (t), è misurata durante la simulazione da opportuni variabili temporali
che scandiscono il trascorrere del tempo in corrispondenza di ogni evento
56
rilevante della simulazione. Questo vincolo si traduce nella seguente
condizione:
Tdl(t) ≤ Tmaxservizio ∀t
•
(3.6)
I viaggi devono soddisfare un criterio di minimizzazione dei tempi di
servizio, in altre parole:
Funzione Obiettivo: z = minTdl ∀t
(3.7)
3.6 Descrizione dell’algoritmo di ottimizzazione
L’algoritmo di ottimizzazione riceve in ingresso i database relativi alla rete
stradale (archi e nodi), ai punti di raccolta, ai veicoli ed i parametri di input,
elabora questi dati e restituisce in uscita l’itinerario di raccolta, in termini di
ordine di punti serviti, con relativi distanze, durate e costi di realizzazione ed
indicatori di qualità del servizio.
I parametri di input sono i parametri introdotti dall’utente per rappresentare al
meglio le caratteristiche del problema specifico, come: la durata dell’orizzonte
temporale di riferimento, i giorni non lavorativi, i profili di servizio, le classi di
velocità associate ai diversi tipi di strada, i valori dei pesi da utilizzare per il
calcolo della priorità di servizio dei punti. In particolare, l’orizzonte temporale di
riferimento è stato assunto pari ad una settimana, coerentemente con l’attuale
organizzazione del servizio.
La valutazione dei viaggi ottenuti dalla simulazione, e quindi il confronto tra le
diverse soluzioni, si basa su una serie di indicatori prestazionali, che forniscono
le seguenti informazioni:
•
Numero dei punti raccolta serviti;
•
Numero dei cassonetti serviti;
•
Numero dei cassonetti sovraccarichi;
•
Numero dei punti raccolta non serviti;
•
Numero di passaggi in discarica;
•
Quantità di rifiuti raccolti (kg);
•
Tempo necessario per spostarsi dalla zona di raccolta al deposito o alla
discarica (h.m.s);
•
Tempo necessario per svuotare i cassonetti (h.m.s);
•
Tempo totale di servizio (h.m.s);
•
Lunghezza dei percorsi per spostarsi dalla zona di raccolta al deposito o alla
discarica (km);
57
•
Lunghezza totale del percorso di servizio (km);
•
Costo degli svuotamenti (€);
•
Costo del viaggio (€);
•
Costo totale del servizio (€);
•
Produttività del viaggio e produttività media di tutti i viaggi (kg/h);
•
Coefficiente di utilizzo del veicolo, dato dal rapporto tra il carico e la
capacità totali del servizio.
Qualora la soluzione ottenuta non risulti soddisfacente, è necessario modificare i
parametri del problema, in modo da indirizzare più opportunamente la ricerca
della soluzione organizzativa.
Il software di simulazione è strutturato in modo modulare, cioè si basa su una
serie di procedure che effettuano ciascuna operazioni relativamente semplici e
che sono tra loro il più possibile indipendenti. Tale soluzione rende la struttura
del programma flessibile e agevola l’eventuale sostituzione o modifica delle
singole procedure.
3.7 Criteri di pianificazione
Il processo di costruzione dei viaggi si sviluppa mediante singole inserzioni
successive di cassonetti, basate sulla valutazione del grado di priorità di servizio
dei cassonetti e sulla determinazione del costo minimo di inserimento;
l’esecuzione di ogni inserzione richiede la verifica del rispetto dei vincoli
operativi imposti. La procedura prevede, inoltre, una fase di rifinitura della
soluzione ottenuta, che valuta la convenienza di eventuali spostamenti dei
cassonetti all’interno dello stesso viaggio e di eventuali scambi di cassonetti tra i
diversi viaggi. Qualora ci siano viaggi inseriti dall’utente, la procedura si limita
a valutarli.
Il processo di pianificazione si articola nelle seguenti fasi principali:
1) calcolo delle distanze, dei tempi e dei punteggi dei punti raccolta;
2) costruzione dei viaggi ammissibili;
3) omogeneizzazione degli scarichi ed ottimizzazione;
4) determinazione dei percorsi a costo minimo.
3.7.1 Calcolo di distanze, tempi e punteggi di priorità
In questa fase la procedura determina le matrici delle distanze e dei tempi dei
collegamenti tra i punti e tra questi ed il deposito e la discarica, quindi assegna
58
ad ogni punto raccolta un punteggio proporzionale alla sua priorità di servizio ed
infine classifica i punti in base a tale punteggio secondo un ordine decrescente.
Il punteggio di priorità di servizio serve per determinare il primo punto da
inserire nel viaggio. Il punteggio indicante il grado di priorità di servizio di un
punto è determinato in base ai seguenti parametri:
•
Numero di visite (NV): numero di visite settimanali richieste dal punto,
•
Intervallo di svuotamento (I): numero di giorni che intercorrono tra due
svuotamenti successivi del punto;
•
Riempimento medio giornaliero (RPM): quantità media dei rifiuti
accumulata dal punto in una giornata;
•
Posizione: posizione del punto rispetto al deposito e alla discarica associati
al veicolo considerato; la posizione del punto deve tener conto sia
dell’aspetto spaziale (lunghezza del tratto) sia dell’aspetto temporale (tempo
di percorrenza del tratto) e quindi è costituita da due componenti DD e TT,
così determinate:
DD = Distanza (DEPOSITO, Punto) + Distanza (Punto, DISCARICA) (3.8)
TT = Tempo (DEPOSITO, Punto) + Tempo (Punto, DISCARICA)
(3.9)
Più precisamente, il punteggio rappresentante la priorità di servizio di ogni punto
è calcolato come media pesata di tali parametri, mediante la seguente relazione:
P=Wvis⋅NV+Wriemp⋅RPM+Wpos⋅[MIN_DIST*DD+(1-MIN_DIST)*TT (3.10)
essendo:
•
Wvis il coefficiente di pesatura per il numero di visite del punto;
•
Wriemp il coefficiente di pesatura per il riempimento del punto;
•
Wpos il coefficiente di pesatura della posizione del punto rispetto al
deposito ed alla discarica;
•
MIN_DIST il coefficiente di pesatura dei tempi di spostamento e delle
distanze dal punto al deposito e alla discarica.
E’ da notare che, mediante questi coefficienti di pesatura, è possibile adattare il
calcolo del punteggio alle specifiche esigenze dell’utente e quindi più in
generale è possibile modellare il processo di raccolta secondo scenari diversi.
Questa fase è realizzata mediante opportune procedure di supporto e funzioni di
utilità, di cui ricordiamo le principali:
CALCOLA_DISTANZE_E_TEMPI: procedura che calcola le matrici delle
distanze e dei tempi tra i diversi punti e tra i singoli punti e i nodi deposito e
discarica corrispondenti al veicolo considerato.
59
CALCOLA_SCORE: procedura che, dato un veicolo, e quindi dati il
deposito e la discarica ad esso associati, calcola per ogni punto raccolta un
punteggio proporzionale alla priorità di servizio.
3.7.2 Costruzione dei viaggi ammissibili
Una volta assegnato il veicolo, risultano assegnati anche il deposito e la discarica
a cui il veicolo fa riferimento: il viaggio di ogni veicolo si può considerare
costituito da una o più porzioni, ciascuna delle quali inizia e termina nel deposito
o nella discarica. E’ da notare che se un viaggio è costituito da una sola
porzione, allora i punti iniziale e finale del viaggio coincidono con il deposito e
la porzione coincide con il viaggio stesso; in generale, tuttavia, un viaggio è
composto di più porzioni, delle quali la prima inizia dal deposito e termina in
una discarica e l’ultima parte da una discarica e termina al deposito.
Il processo di creazione dei viaggi si basa su di una tecnica di inserzione che si
rifà all’euristica della cheapest insertion: per ogni veicolo i viaggi ammissibili
sono costruiti a partire dal percorso iniziale, determinato in base al punteggio di
priorità di servizio, mediante un processo di inserzioni successive, che riguardano un punto raccolta alla volta, secondo il criterio del minimo costo di
inserimento. L’inserzione di un nuovo punto in un viaggio comporta un
incremento del costo del viaggio (costo di inserzione), imputabile all’incremento
di lunghezza e di durata del percorso necessari per servire il nuovo punto: il
costo di inserzione è costituito da due componenti, una spaziale ed una
temporale, la cui importanza relativa dipende dalla scelta del coefficiente di
pesatura MIN_DIST. Più specificatamente, il costo di inserzione di un punto k tra
due punti i e j già inseriti è dato da:
Cins(i, k, j) = MIN_DIST × Dins(i, k, j)+ (1-MIN_DIST) × Tins(i, k, j)
(3.11)
essendo:
•
MIN_DIST il coefficiente di pesatura dei tempi e delle distanze di
spostamento;
•
Dins(i, k, j) la distanza aggiuntiva di inserimento;
•
Tins(i, k, j) il tempo aggiuntivo di inserimento.
La distanza e il tempo aggiuntivi di inserimento si determinano dalle espressioni:
Dins (i, k, j) = Distanza (i, k) + Distanza (k, j) - Distanza (i, j)
(3.12)
Tins(i, k, j) = Tempo (i, k) + Tempo (k, j) – Tempo (i, j)
(3.13)
essendo:
60
•
Distanza (i, k) la lunghezza del cammino a costo minimo che collega il
punto i al punto k da inserire;
•
Distanza (k, j) la lunghezza del cammino a costo minimo che collega il
punto k da inserire al punto j;
•
Distanza (i, j) la lunghezza del cammino a costo minimo che collega il
punto i al punto j;
•
Tempo (i, k) il tempo totale necessario per percorrere il cammino a costo
minimo che collega il punto i al punto k da inserire;
•
Tempo (k, j) il tempo totale necessario per percorrere il cammino a costo
minimo che collega il punto k da inserire al punto j,
•
Tempo (i, j), il tempo totale necessario per percorrere il cammino a costo
minimo che collega il punto i al punto j.
Una volta assegnato il veicolo, risultano assegnati anche il deposito (DEP) e la
discarica (DISC) cui il veicolo fa riferimento. Si determina per ogni gruppo di
punti aventi lo stesso profilo, il numero di viaggi necessari per soddisfare il
servizio, nel rispetto dei vincoli imposti dall’intervallo massimo di servizio e
dalla capacità del veicolo. Inizialmente il viaggio viene costruito a partire dal
punto di raccolta con massimo punteggio di priorità di servizio, cioè il punto che
occupa la prima posizione del vettore p_sort: il punto viene inserito temporaneamente tra il deposito e la discarica. Si ottiene così un viaggio parziale costituito
dai cammini minimi che collegano il deposito al punto ed il punto alla discarica.
Successivamente ad ogni iterazione si determina, per ogni punto non ancora
servito, il costo di inserzione in relazione a ciascuna delle possibili posizioni di
inserimento, individuate dai punti già inseriti. Più precisamente, se sono già stati
inseriti N punti (P1, P2,…, PN),le possibili posizioni di inserimento P* sono N+1,
cioè sono le seguenti:
DEP-P*-P1-P2-…-PN-DISC
DEP-P1-P*-P2-…-PN-DISC
DEP-P1-P2-P*-…-PN-DISC
DEP-P1-P2-…-P*-PN-DISC
DEP-P1-P2-…-PN-P*-DISC
Il costo di inserzione minimo determina quale punto inserire e in quale posizione
inserirlo.Una volta individuato il punto da inserire e la relativa posizione di
inserimento, è necessario verificare se il veicolo è in grado di servire il nuovo
punto, cioè se la capacità residua del veicolo è maggiore della domanda del
punto: in caso affermativo, il punto viene inserito nel viaggio; in caso negativo,
61
viene cercata la discarica più vicina alla posizione dell’ultimo punto servito, il
veicolo viene indirizzato verso tale discarica,dove il veicolo viene svuotato e
quindi il viaggio riprende dal punto che prima non poteva essere servito.
E’ da notare che, nel caso ci siano viaggi inseriti dall’utente, la procedura si
limita a calcolare il viaggio, cioè a determinare il valore degli indicatori
prestazionali del viaggio e a convalidare il viaggio.
3.7.3 Omogeneizzazione ed ottimizzazione dei viaggi
In questa fase la procedura valuta la convenienza di eventuali modifiche alla
soluzione ottenuta, in particolare si valutano gli effetti sul costo di ogni viaggio
conseguenti a:
•
scambi tra punti appartenenti a porzioni o viaggi diversi;
•
inserimenti di punti in una diversa posizione.
L’obiettivo è di omogeneizzare il numero di passaggi in discarica e di
minimizzare il costo di ogni viaggio.
Tale fase viene condotta da due procedure dedicate:
INTRA_INSERT: procedura che valuta gli effetti di inserimenti di punti,
appartenenti a viaggi diversi, sulle distanza e sulle durate totali dei
percorsi , e che, qualora trovi un’inserzione conveniente, la effettua nel
rispetto dei vincoli imposti;
INTRA_EXCHANGE: procedura che valuta gli effetti degli scambi di
punti appartenenti a viaggi diversi sulle distanza e sulle durate totali dei
percorsi , e che, qualora trovi uno scambio conveniente, lo effettua nel
rispetto dei vincoli imposti.
3.7.4 Determinazione dei percorsi a costo minimo
La costruzione dei viaggi ammissibili richiede preliminarmente la determinazione dei percorsi a costo minimo che collegano i nodi del grafo: tale calcolo è
effettuato da una procedura dedicata che si rifà all’algoritmo di Dijkstra.
In estrema sintesi, tale algoritmo permette, dato un grafo orientato G costituito
da M nodi e da N archi, tutti aventi costo non negativo, di determinare il
cammino minimo da un nodo s ad un nodo t. Il costo di un generico arco diretto
(i,j) può essere valutato in termini temporali e quindi dato dal tempo di
spostamento da i a j, o in termini spaziali e quindi dato dalla lunghezza dell’arco
(i,j): nel problema in esame si considera l’aspetto temporale, coerentemente con
il fatto che i costi del trasporto sono valutati in base al tempo di servizio.
62
La procedura, a partire dal grafo orientato rappresentativo della rete stradale,
determina per un singolo nodo del grafo i percorsi minimi che lo collegano a
tutti i nodi del grafo raggiungibili a partire dal nodo in esame.
La procedura riceve in ingresso una struttura di tipo forward list che memorizza
in una matrice gli indici di tutti glia archi diretti presente nel grafo, l’indice del
nodo a partire dal quale calcolare i cammini minimi (nodo sorgente s) e l’orario
corrente del viaggio simulato. Se il numero dei nodi del grafo è pari a M, la
matrice sarà di tipo M×M e l’elemento forwi,j conterrà l’indice dell’arco di nodo
iniziale i e nodo finale j se esiste l’arco diretto (i,j) o il valore –1 se tale arco non
esiste nel grafo. E’ da notare che tale procedura richiede in ingresso anche
l’orario corrente del viaggio simulato perché la modellazione della rete stradale
prevede una classificazione delle strade in base alla relativa percorribilità nelle
diverse ore della giornata e quindi la scelta del cammino minimo può risultare
strettamente dipendente dall’orario in cui questa scelta deve compiersi.
La determinazione dei cammini minimi che collegano il nodo sorgente s agli
altri nodi avviene mediante la progressiva individuazione dei nodi immediati
successori del nodo corrente, l’assegnamento temporaneo ai nodi raggiunti di
etichette con il tempo di spostamento per giungervi da s, la permutazione di
queste etichette da temporanee a permanenti e l’utilizzo di vettori per
memorizzare i passi. Inizialmente, si assegna al nodo s un’etichetta con valore
nullo, poiché nullo è il tempo di spostamento da s a se stesso, e a tutti gli altri
nodi un’etichetta con il valore massimo ammesso, poiché questi nodi non sono
ancora stati raggiunti. Quindi, si determinano tutti i nodi v successori di s, cioè
quei nodi v per i quali esiste l’arco diretto (s, v) e questi vengono contrassegnati
con un’etichetta di valore pari al tempo di percorrenza necessario per spostarsi
da s a v, eventualmente modificato mediante opportuni coefficienti correttivi;
quindi tra i nodi v immediatamente successori di s si individua il nodo x con la
minima etichetta temporanea, cioè il nodo più vicino, in termini temporali, a s e
si converte l’etichetta di x da temporanea a permanente. Il procedimento si ripete
a partire dal nodo etichettato permanentemente più di recente (nodo recent),
individuando i nodi successori e tra questi il più vicino; durante le iterazioni i
valori delle etichette temporanee dei diversi nodi vengono aggiornate qualora
risulti che il cammino da s ad essi attraverso il nodo recente è di costo inferiore
al costo precedentemente determinato. Il processo continua fino a che non si
rende permanente l’etichetta del nodo finale t.
63
PROCEDURA PIANIFICAZIONE
Lettura di file di input
Calcolo di matrice di distanze e tempi
Calcolo di punteggio di priorità di servizio
Ordinamento di punti raccolta
Costruzione di viaggi ammissibili
Verifica di vincoli
Omogeneizzazione e ottimizzazione viaggi
PROCEDURA
CALCOLA_DISTANZE_
E_TEMPI
PROCEDURA
CALCOLA_SCORE:
calcola di grado di priorità
di punti raccolta
PROCEDURA
DIJKSTRA:
calcola di grado di
cammini minimi
PROCEDURE
INTRA-INSERT e
INTRA-EXCHANGE:
valutazione ed
effettuazione di inserzioni
e scambi di punti
Calcolo di indicatori prestazionali
Stampa viaggi
Figura 3.4 Schema delle principali procedure dell’algoritmo di simulazione
64
Capitolo 4 – Attuale organizzazione del servizio di raccolta
CAPITOLO 4
Attuale organizzazione
del servizio di raccolta
4.1 Servizio di raccolta dei rifiuti nel Comune di Ravenna
Il servizio di raccolta e smaltimento dei rifiuti urbani per il Comune di Ravenna
viene svolto da HERA Spa, holding nata nel 2002 dalla fusione di SEABO Spa
di Bologna e di undici aziende del perimetro romagnolo, compresa AREA Spa,
che gestiva il servizio in precedenza.
L’organizzazione del servizio e la conseguente definizione degli indicatori e
degli standard di qualità sono definiti dal contratto di servizio, che regola il
rapporto tra amministrazione comunale e gestore.Di seguito sono presentati gli
elementi fondamentali dell’organizzazione del servizio di raccolta dei rifiuti
solidi urbani indifferenziati mediante cassonetti nella zona periferica del comune
di Ravenna. I cassonetti sono posizionati dal gestore sul suolo pubblico e
consentono il conferimento dei rifiuti 24 ore su 24 da parte degli utenti. Il
posizionamento dei cassonetti deve soddisfare sia l’esigenza di fruibilità del
servizio da parte degli utenti, che impone una distanza massima tra cassonetto e
confine di proprietà dell’utenza, sia l’obbligo di contenimento dell’impatto
ambientale, che prevede una distanza minima tra cassonetto ed abitazioni,
monumenti ed attività commerciali. La definizione degli aspetti organizzativi ed
in particolare la scelta delle attrezzature e dei mezzi più idonei per dimensioni e
portate, sono notevolmente influenzate da: le caratteristiche delle zone del
territorio, il numero e la tipologia delle utenze, il contesto urbanistico. La
frequenza di svuotamento dei cassonetti è diversificata in base alla
conformazione urbanistica ed alla stagionalità e prevede da un minimo di due ad
un massimo di sette interventi ogni settimana. In ogni caso il numero dei
cassonetti e la frequenza di svuotamento devono garantire una volumetria
sufficiente alle necessità del bacino di utenza riferito al cassonetto stesso, tenuto
conto del conferimento medio. Per la zona periferica la frequenza di
svuotamento è di due giorni su sette. Gli orari di svolgimento rientrano in una
fascia oraria compresa tra le 4.00 e le 19.00; i reparti di raccolta sono strutturati
65
Capitolo 4 – Attuale organizzazione del servizio di raccolta
in modo da limitare al massimo le problematiche di rallentamento del servizio
causate dal traffico veicolare. Il servizio è svolto con diverse tipi di mezzi; per la
raccolta nella zona periferica del territorio, si utilizzano compattatori a
caricamento laterale.
E’ importante notare che nell’attività di gestione dei rifiuti, ovvero nelle attività
di raccolta, trasporto e smaltimento dei rifiuti, il costo dell’attività di raccolta e
di trasporto dei rifiuti ha un peso preponderante sui costi operativi di gestione,
come si evince dalla seguente tabella che riporta i costi operativi di gestione dei
rifiuti solidi urbani sostenuti da Hera per il servizio nell’anno 2002.
Descrizione voce di costo
Costi di raccolta
di rifiuto indifferenziato (CRT)
Costi di raccolta
di rifiuto differenziato (CRD)
Costi di trattamento e smaltimento
di rifiuto indifferenziato (CTS)
Costi di trattamento e riciclo
di rifiuto differenziato (CTR)
Costi operativi di gestione (CG)
Valore (€)
Peso %
€ 3.003.150,00 37,48%
€ 1.406.400,00 17,55%
€ 2.796.728,00 34,90%
€ 807.284,00
10,07%
€ 8.013.562,00
Tabella 4.1Costi operativi di gestione riferiti all’anno 2002
La pianificazione svolta dal presente lavoro ha considerato il servizio di raccolta
del forese del comune di Ravenna: la zona è molto vasta (il comune di Ravenna
con la sua estensione di un diametro di circa 40km è uno dei comuni italiani di
maggiore ampiezza territoriale) e comprende una cinquantina di frazioni; inoltre
è soggetta ad una spiccata espansione urbanistica, con conseguente aumento
della domanda di servizio, e quindi necessita di un monitoraggio continuo per
verificare la soddisfazione del bacino di utenza. A tal proposito è fondamentale
il contributo del sistema GIS aziendale, che sostiene l’attuale organizzazione,
permettendo di delineare un quadro conoscitivo completo e aggiornato. Un
esempio delle informazioni da esso ricavabili è la figura 1.1, che illustra la
distribuzione dei cassonetti nella zona periferica del comune di Ravenna.
Il servizio riguarda lo svuotamento di cassonetti di tipo multi-materiale (raccolta
indifferenziata) e viene realizzato con una raccolta automatizzata mediante
veicoli compattatori a caricamento laterale.E’ da notare che l’utilizzo di veicoli a
presa laterale impone che i cassonetti, per poter essere svuotati, si trovino sul
lato destro della strada rispetto al senso di percorrenza del veicolo stesso. Ogni
veicolo richiede un operatore (autista); i turni lavorativi degli operatori sono di
66
Capitolo 4 – Attuale organizzazione del servizio di raccolta
sei ore con un’eventuale ora aggiuntiva di straordinario. Il servizio fa riferimento
ad un unico deposito ed ad un’unica discarica, situati nella zona nord-est del
territorio. I cassonetti serviti sono 1422, raggruppati in 811 punti raccolta.
N
W
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
S
#
S
#
S#
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S
#
S
S
#
S
S
#
S
#
S
#
S
#
S#
#
S
#
S
#
S
S
#
S
#
##
S
S
#
S
#
S
S#
S
#
S#
#
S
#
#
##
S
S
b#S#S#S#S#S
DEPO SITO
#
S
S
#
S R
T
D U
L IE N
E L
D
IE
##
S
S
#
S
#
S#
S
S
#
S
#
S
#
S#
S
#
S#
#
S
#
S
S#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S#
S#
S
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S
#
S
#
S
#
S
#
S#
S
#
S#
#
S
#
S #
S
S #
S
#
S
S
#
S
#
S
#
S
#
S#
#
S
#
S
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
69
1
1 12
07 56
S
#
S
#
Strade Ravenna
Strade Cervia
Contenitori
S
#
#
S
S
#
S
#
S
S
#
S
#
S
#
S
#
S
#
S #
#
S
#
S
#
S
#
S#
S
S#
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
S #
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
S#
#
S#
S
#
S
#
S
S
#
S#
S
#
S#
#
S#
S
#
S#
S
#
S#
S#
S
#
S
#
S#
S
S
#
S
#
S#
#
S
#
S
#
S
#
S#
S#
S #
S
#
S
S
#
S
S
#
S#
#
S
#
S
#
S
#
S
#
S
#
S#
#
S
S
#
S
#
S#
#
S#
S
S#
#
S
#
S
#
S #
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S#
S
#
S
S
S
#
S
#
##
S
S
S#
#
S
10
1 P
74 3
1 54
8 75 38
6
##
S
S
S
#
Legenda
#
57
S#
S
S
#
##
S
S
#
S
#
S
#
S
#
S
#
S
#
#
S
RO E
MA
S
#
##
S
S
#
S
#
S
S
#
S#
#
S
#
S
#
S
#
S
S
#
S
#
S
#
S#
S
#
S#
#
S
S
#
S
SS
#
S
S
#
S
#
S#
#
S
#
S#
#
##
S
S#
S
#
S
#
S#
#
S
S
S
#
S
#
S#
#
S#
#
S
DISCARICA
RAVENNA
PA
R O
EU
S
#
##
S
S#
#
S
S
S#
#
S
#
S#
#
S
S
#
S
S
S#
S#
#
S#
S
S#
#
S
T L
I O
I
S
##
S
S
#
b
S
S
S#
#
S#
#
M ON
T A
I
S#
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S#
S
S#
#
S
#
S
#
S
#
S
#
S
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S#
#
S
S
#
S
S
#
S
#
SS#
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
S #
#
S
#
S
S#
S#
S#
#
S
#
S#
S
#
S
S
#
S#
#
S
#
S
#
S
#
S
#
S
#
S
#
S
S
#
##
S
S
S
#
S
#
S
#
S
#
S
#
S
S
#
S
#
S
#
S #
#
S
#
S
#
S
#
S
#
S
#
S#
#
S
#
S#
S#
#
S
#
S
S
S
S
#
S#
#
S
#
S#
#
S
SS
S#
#
S#
#
S
S #
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
S
S#
#
S
#
S
#
S
#
S
#
S
#
S
S
#
S#
#
S
#
S#
#
S
#
S
#
S
#
S
#
S
S
#
S
#
S
S
#
S
#
S
#
S#
#
S
#
S
S #
S
#
S#
#
S
#
S
S#
#
S#
S #
S#
S
#
S#
S
#
S
#
S
#
S
#
S
#
S
#
S
S#
S#
#
S
#
S
S#
#
S
#
S
#
S
#
S
#
S
##
S
S
#
S
S
#
S#
S#
#
S
##
SS
S#
#
##
S
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S#
#
S
S
#
S#
#
S
#
S
#
S
#
S#
S#
#
S
S
S
#
S
#
E
8
1P
74 52
7
S
##
S
S
#
S
#
S
##
S
S
#
S
#
S
##
S
##
S
S
#
S
#
S
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
#
b
[DISCARICA
SAVIO]
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
S
#
#
S
S
S#
#
S
S
S#
#
S#
#
S
#
S
#
S#
S#
S
#
S#
##
S
S
0
10000
20000 Meters
Figura 4.1 Distribuzione dei cassonetti nella zona periferica di Ravenna
4.2 Reparti di raccolta
L’attuale organizzazione del servizio si basa su un raggruppamento dei
cassonetti in dodici reparti di servizio, corrispondenti alle diverse frazioni del
territorio: tali reparti sono indicati con i termini Forese 1, 2, 3, 4, 5, 6, 7, 8, 9,
10, 12, 13.Questa soluzione risulta essere di facile memorizzazione per gli
67
Capitolo 4 – Attuale organizzazione del servizio di raccolta
operatori che eseguono il servizio, poiché i reparti sono riconducibili ad una o
più frazioni ed è risultata piuttosto facile da modificare in seguito all’aggiunta di
nuovi cassonetti, dovuta all’aumento della domanda nelle singole località che
sono soggette ad un progressivo aumento di insediamento urbano. Ciascun
reparto è servito da un percorso di raccolta, che parte dal deposito e vi fa ritorno
a fine servizio, che comprende due passaggi in discarica e che viene effettuato
con una frequenza bisettimanale e con un intervallo di tre giorni. I singoli
percorsi sono effettuati nell’arco del turno di lavoro degli operatori, che
comprende sei ore di lavoro ordinario con un’eventuale ora di lavoro
straordinario. La tabella seguente illustra i diversi reparti con indicazione dei
rispettivi giorni di raccolta, percorsi di massima ed orari di servizio.
Reparti Giorni
lun/gio
F1
F2
mar/ven
F3
mer/sab
F4
lun/gio
F5
mar/ven
F6
mer/sab
F7
lun/gio
F8
mer/sab
F9
mar/ven
F10
lun/gio
F12
merc/sab
F13
mar/ven
Zona e Località
Sud-Est (Classe Sud, Fosso Ghiaia,
Castiglione, Mensa Matellica)
Nord-Ovest (S.Alberto, S. Romualdo,
S.Antonio, Canalazzo, Mandriole)
Sud-Est (Classe Nord, Fosso Ghiaia, Borgo
Bevano, Savio, Mad. Albero)
Sud_Ovest (S.P.Trento, Coccolia,
Durazzano, Ducenta, M.Castello, Ghibullo,
Roncalceci, Pilastro, Filetto)
Sud (Borgo Faina, San Zaccaria, Casemurate,
Borgo Osteria, Campiano)
Sud-Ovest (S. Stefano, Carraie, Bastia,
S.P.Vincoli)
Nord-Est (Mezzano, Ammonite, Santerno,
Borgo Anime)
Nord-Est (Camerlona, B. Anime, B. Masotti,
Torri, Savarna, Grattacoppa)
Est (Classe, Porto Fuori)
Orario
12.3018.30
12.3018.30
12.3018.30
12.3018.30
12.3018.30
12.3018.30
12.3018.30
12.3018.30
12.3018.30
Ovest (CTO, Romea Nord, Fornace Zarattini) 12.3018.30
Ovest (Longana, S.Marco, Villanova,
12.30S.Michele, Piangipane)
18.30
Sud ed Est (S.Bartolo, S.P.Campiano,
12.30S.P.Vincoli, Gambellara, Piangipane)
18.30
Tabella 4.2 Reparti di raccolta
Ogni reparto comprende almeno un centinaio di cassonetti. Per ogni reparto sono
disponibili dei dati relativi alla domanda media settimanale, che vengono
riportati nella tabella seguente, insieme al numero di punti raccolta e di
cassonetti, e alla capacità totale in litri e in chili, determinata da quella
68
Capitolo 4 – Attuale organizzazione del servizio di raccolta
volumetrica, considerando un peso specifico del rifiuto indifferenziato pari a
0,25 t/m3.
Reparto Numero punti Numero Capacità Capacità
raccolta
cassonetti tot (lt)
tot (kg)
54
118
286.500
71.625
F1
79
119
268.000
67.000
F2
74
129
320.500
80.125
F3
70
106
238.300
59.575
F4
68
108
240.000
60.000
F5
69
103
239.500
59.875
F6
72
118
269.200
67.300
F7
66
114
254.200
63.550
F8
81
138
348.800
87.200
F9
43
120
305.100
76.275
F10
70
132
321.000
80.250
F12
65
117
276.400
69.100
F13
Conferimento
medio (kg/sett)
36.036
35.910
35.819
35.735
35.735
35.924
35.714
35.938
35.959
35.679
35.693
35.014
Tabella 4.3 Dati sulle capacità e sui conferimenti medi di ogni reparto
4.3 Caratteristiche degli attuali percorsi di raccolta
Di ogni percorso di raccolta sono state misurate le lunghezze dei rispettivi
percorsi di servizio, distinguendo tra: lunghezza degli itinerari per spostarsi da
un cassonetto all’altro (raccolta), lunghezza dei tragitti che collegano la zona di
raccolta al deposito e alla discarica (spostamento) e lunghezza del collegamento
tra deposito e discarica (ritorno). La misurazione dei percorsi è stata eseguita
direttamente sulle mappe di servizio aziendali e poi tale misura è stata convalidata dai tecnici del servizio di raccolta. Inoltre per ogni percorso di raccolta è
disponibile un’indicazione sulla durata media del servizio. I percorsi si
differenziano molto per le lunghezze degli spostamenti a vuoto, data dalla
somma della raccolta e dello spostamento, e per questo si è ritenuto significativo
evidenziare per ogni percorso il peso in percentuale della distanza a vuoto sulla
distanza totale. Le informazioni sono raccolta nelle tabelle 5.4 e 5.5. Dai dati
raccolti si può notare come per tutti i percorsi, ad eccezione dell’itinerario
identificato con F2 (Forese 2), la lunghezza degli spostamenti sia la componente
preponderante della lunghezza dell’intero percorso. Ciò è dovuto al fatto che la
zona periferica del comune di Ravenna è molto estesa e le posizioni del deposito
e della discarica di Ravenna sono decentrate rispetto alla zona di interesse,
poiché si trovano nella zona nord-est del territorio. L’itinerario F2, invece,
presenta la minima distanza a vuoto, proprio perché riguarda la zona a nord-est
del comune di Ravenna, in cui si trovano il deposito e la discarica.
69
Capitolo 4 – Attuale organizzazione del servizio di raccolta
Reparto Raccolta Spostamento Ritorno
(km)
(km)
(km)
F1
F2
F3
F4
F5
F6
F7
F8
F9
F10
F12
F13
58,47
72,74
45,29
51,06
52,57
43,67
30,32
43,96
34,78
21,30
50,21
60,58
113,40
32,02
62,54
106,48
93,88
104,76
64,61
57,24
52,62
37,38
63,52
64,38
6,64
6,64
6,64
6,64
6,64
6,64
6,64
6,64
6,64
6,64
6,64
6,64
Distanza
Vuoto
(km)
120,04
38,66
69,18
113,12
100,52
111,40
71,25
63,88
59,26
44,02
70,16
71,02
Distanza
Totale
(km)
178,51
111,39
114,47
164,18
153,09
155,08
101,58
107,83
94,04
65,32
120,37
131,61
Durate
medie
(h.m.s)
6.56.48
5.46.52
5.58.29
6.23.01
6.24.54
6.17.27
5.45.49
5.44.28
5.50.41
4.50.06
6.17.44
6.06.49
Tabella 4.4Distanze e durate medie degli attuali percorsi di raccolta
Reparto Distanza Vuoto Distanza Totale Peso di Distanza Vuoto
(km)
(km)
(%)
120,04
178,51
67,25%
F1
38,66
111,39
34,70%
F2
69,18
114,47
60,43%
F3
113,12
164,18
68,90%
F4
100,52
153,09
65,66%
F5
111,40
155,08
71,84%
F6
71,25
101,58
70,15%
F7
63,88
107,83
59,24%
F8
59,26
94,04
63,01%
F9
44,02
65,32
67,39%
F10
70,16
120,37
58,29%
F12
71,02
131,61
53,97%
F13
Tabella 4.5 Peso di distanza a vuoto su distanza totale per ogni percorso di raccolta
Dal punto di vista della minimizzazione delle distanze a vuoto, i percorsi più
critici risultano essere naturalmente quelli che servono le zone più lontane dal
deposito e dalla discarica; può risultare significativa una suddivisione seppur
grossolana dei percorsi in base alla posizione del reparto cui si riferiscono,
rispetto alla zona in cui si trovano il deposito e la discarica.
o
Il percorso F2 serve le zone a nord est del territorio, che sono quelle più
vicine al deposito e alla discarica ed è per questo che per esso risultano
minimi gli spostamenti a vuoto.
70
Capitolo 4 – Attuale organizzazione del servizio di raccolta
o
I percorsi F1 e F3 servono insieme la zona a sud-est del territorio, a partire
dall’immediata periferia del comune di Ravenna fino al confine a sud con il
territorio del comune di Cervia, quindi zone molto lontane dal deposito; in
particolare tra i due quello più critico risulta essere il percorso F1, perché si
estende più a sud con entrambi i viaggi, contrariamente al percorso F3, il cui
primo viaggio descrive un circuito che termina in prossimità del punto di
inizio e il cui secondo viaggio serve una zona più a nord.
o
I percorsi F4, F5 e F6 servono le zone a sud-ovest del territorio,
intersecandosi tra loro.
o
I percorsi F7 e F8 servono delle zone a nord ovest del territorio, che sono
facilmente raggiungibili dal deposito e dalla discarica.
o
I percorsi F9, F10 e F12 servono zone dell’immediata periferia; in
particolare i reparti F9 e F10 sono ben collegati alla zona del deposito e
della discarica, mentre lo spostamento dal deposito al reparto F12 richiede
tempi più lunghi per la tipologia delle strade di collegamento.
o
Il percorso F13 è una sorta di percorso di rifinitura che copre con i suoi due
viaggi zone piuttosto lontane una dall’altra ed è stato organizzato di fatto
per servire quei cassonetti che rimangono non serviti dagli altri percorsi di
raccolta.
71
72
Capitolo 5 – Sperimentazione dell’algoritmo
CAPITOLO 5
Sperimentazione dell’algoritmo
5.1 Premessa
L’algoritmo di ottimizzazione è stato sperimentato per la pianificazione dei
percorsi di raccolta dei rifiuti solidi urbani indifferenziati (RSU) nel territorio
periferico del comune di Ravenna. Il problema della pianificazione dei percorsi
di raccolta dei RSU risulta di non facile soluzione, poiché richiede di considerare
in maniera congiunta i numerosi fattori da cui dipende l’organizzazione del
servizio. Le scelte organizzative sono influenzate in particolare dal fatto che:
•
l’attività di raccolta è soggetta a vincoli spaziali e temporali numerosi e
rigidi; ad esempio: il veicolo può svuotare solo i cassonetti che si trovano
sul lato destro della strada rispetto al senso di percorrenza e può fare
inversione di marcia solo in strade sufficientemente larghe o in prossimità di
piazzole; in alcune zone il servizio non può essere effettuato in ore notturne;
•
la pianificazione del servizio richiede la conoscenza di dati molteplici,
variabili nel tempo ed alcuni non facilmente determinabili; ad esempio: il
numero e la posizione dei cassonetti varia nel tempo, il riempimento medio
giornaliero dei cassonetti è soggetto a variazioni stagionali;
•
la qualità del servizio dipende da fattori temporali e spaziali: lunghezza dei
tragitti, tipo delle strade, velocità di percorrenza, orari di servizio;
•
la soluzione organizzativa, oltre a minimizzare le lunghezze e le durate dei
percorsi di raccolta, dovrebbe anche essere di facile attuazione per gli
operatori ed essere piuttosto flessibile, per essere facilmente modificabile in
caso di aggiunta o spostamento dei cassonetti.
La determinazione di una soluzione organizzativa richiede, quindi, di compiere
diverse scelte di progettazione a livello operativo; tali scelte spesso necessitano,
a posteriori, di un processo retroattivo di revisione, per il raggiungimento di un
trade-off ottimale; è utile quindi un monitoraggio continuo dei dati delle
raccolte, per poter studiare il problema in maniera approfondita e completa e per
poter fronteggiare nel modo più corretto eventuali scostamenti significativi
rispetto ai valori attesi. L’algoritmo di simulazione, pur non essendo in grado di
73
Capitolo 5 – Sperimentazione dell’algoritmo
determinare la soluzione ottima, tuttavia permette di ottenere soluzioni che
tengono in considerazione i numerosi fattori da cui dipende il servizio e che sono
ottenibili in tempi relativamente rapidi (una simulazione relativa ad un centinaio
di punti raccolta impiega poche decine di secondi). Inoltre la struttura del
programma offre la possibilità di agire su determinati parametri di input e,
quindi, di influenzare la soluzione con lo scopo di rendere il modello di
riferimento il più possibile aderente alla situazione reale.
In primo luogo, è importante ricordare che l’algoritmo è implementato non
direttamente sulla rete stradale reale, ma sul modello che la rappresenta: prima di
procedere con le sperimentazioni vere e proprie, è stato necessario verificare la
correttezza del modello. In secondo luogo, è importante sottolineare come il
risultato della simulazione dipenda dai valori scelti per i parametri di input: per
tener conto di ciò, è stato necessario condurre diversi tipi di simulazione,
ciascuna caratterizzata da valori diversi dei principali parametri di input.
La sperimentazione vera e propria si è sviluppata in due fasi:
ottimizzazione
del
servizio
di
raccolta,
nel
rispetto
dell’attuale
raggruppamento dei cassonetti in reparti;
ottimizzazione del servizio di raccolta, prescindendo dall’attuale clustering.
5.2 Validazione del modello di rete stradale
L’algoritmo di ottimizzazione fa riferimento non direttamente alla rete stradale
reale, ma alla rete di archi che la rappresenta; per cui prima di procedere con le
ottimizzazioni vere e proprie è stato necessario verificare la coerenza tra le
distanze ed i tempi calcolati sul modello e quelli forniti da HERA.
Essendo i dati disponibili riferiti ai singoli reparti di raccolta in cui è attualmente
organizzato il servizio, le verifiche sono state condotte in relazione a questi
percorsi, che sono indicati con: Forese 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 12, 13. Per
effettuare questa verifica, si sono simulati gli attuali viaggi, nel rispetto
dell’attuale ordine di cassonetti serviti, e si sono confrontati i risultati ottenuti
con quelli disponibili, in termini di durata e lunghezza totali del servizio. In
particolare, la lunghezza dell’intero percorso di servizio (Distanza Totale) è la
risultante di due componenti:
o
Distanza Raccolta: lunghezza dell’itinerario seguito per spostarsi da un
cassonetto all’altro;
o
Distanza Vuoto: lunghezza del tragitto che collega il deposito o la discarica
alla zona di raccolta, che a sua volta è costituito da cinque componenti:
74
Capitolo 5 – Sperimentazione dell’algoritmo
•
Vuoto 1 (/Vuoto 3): tragitto che collega il deposito al primo punto
raccolta servito nel primo (/secondo) viaggio;
•
Vuoto.2 (/ Vuoto 4): tragitto che collega l’ultimo punto servito dal
primo (/secondo) viaggio alla discarica;
•
Vuoto.5: tragitto che collega la discarica al deposito.
E’ da notare che i valori forniti da HERA delle durate dei singoli percorsi sono
dei valori medi determinati in base a diverse misurazioni nel tempo.
Le tabelle 6.1, 6.2, 6.3 illustrano, rispettivamente, le lunghezze dei percorsi
fornite, quelle valutate e le relative differenze.
Lunghezze
Fornite (km)
F1
F2
F3
F4
F5
F6
F7
F8
F9
F10
F12
F13
Vuoto
1
10,90
6,06
10,70
24,89
13,32
21,13
12,78
9,03
10,70
0,10
16,43
12,62
Vuoto
2
36,85
4,32
17,34
34,56
28,55
30,40
18,21
16,99
15,28
12,80
14,70
23,11
Vuoto
3
34,68
6,71
16,33
22,29
28,70
24,72
17,90
16,97
12,80
12,39
16,67
18,79
Vuoto Vuoto Distanza Distanza Distanza
4
5
Vuoto Raccolta Totale
30,98 6,64 120,04 58,47 178,51
14,92 6,64
38,66
72,74 111,39
18,17 6,64
69,18
45,29 114,47
24,75 6,64 113,12 51,06 164,18
23,31 6,64 100,52 52,57 153,09
28,52 6,64 111,40 43,67 155,08
15,73 6,64
71,25
30,32 101,58
14,25 6,64
63,88
43,96 107,83
13,85 6,64
59,26
34,78
94,04
12,08 6,64
44,02
21,30
65,32
15,73 6,64
70,16
50,21 120,37
9,86
6,64
71,02
60,58 131,61
Tabella 5.1 Lunghezze fornite dei percorsi di raccolta
Lunghezze
Valutate (km)
F1
F2
F3
F4
F5
F6
F7
F8
F9
F10
F12
F13
Vuoto
1
10,90
6,02
10,51
23,63
13,31
18,59
12,03
9,22
10,59
0,10
15,41
12,70
Vuoto
2
30,81
4,32
17,10
32,28
28,13
30,74
16,19
16,54
15,24
12,80
14,63
23,15
Vuoto
3
32,39
6,73
16,33
22,29
28,44
24,58
15,87
16,50
12,72
12,53
14,96
16,33
Vuoto Vuoto Distanza Distanza Distanza
4
5
Vuoto Raccolta Totale
30,42 6,64
111,16
58,15
169,30
14,02 6,64
37,73
70,26
107,99
18,19 6,64
68,77
45,29
114,06
24,76 6,64
109,60
50,50
160,10
23,11 6,64
99,61
52,48
152,09
28,67 6,64
109,22
37,61
146,84
14,19 6,64
64,91
30,29
95,20
12,32 6,64
61,22
43,29
104,51
13,58 6,64
58,77
33,00
91,77
12,08 6,64
44,16
20,78
64,94
13,71 6,64
65,34
46,16
111,51
9,89
6,64
68,71
57,25
125,95
Tabella 5.2 Lunghezze valutate dei percorsi di raccolta
75
Capitolo 5 – Sperimentazione dell’algoritmo
Distanze
Distanza Vuoto
Distanza Raccolta
Distanza Totale
Percorsi Differenza Variazione Differenza Variazione Differenza Variazione
(km)
(km)
(km)
-8,884
-7,40%
-0,325
-0,56%
-9,209
-5,16%
F1
-0,93
-2,41%
-2,474
-3,40%
-3,404
-3,06%
F2
-0,409
-0,59%
0
0,00%
-0,409
-0,36%
F3
-3,529
-3,12%
-0,554
-1,09%
-4,083
-2,49%
F4
-0,905
-0,90%
-0,088
-0,17%
-0,993
-0,65%
F5
-2,182
-1,96%
-6,059
-13,87%
-8,241
-5,31%
F6
-6,338
-8,90%
-0,034
-0,11%
-6,372
-6,27%
F7
-2,662
-4,17%
-0,662
-1,51%
-3,324
-3,08%
F8
-0,492
-0,83%
-1,781
-5,12%
-2,273
-2,42%
F9
0,14
0,32%
-0,527
-2,47%
-0,387
-0,59%
F10
-4,815
-6,86%
-4,046
-8,06%
-8,861
-7,36%
F12
-2,316
-3,26%
-3,336
-5,51%
-5,652
-4,29%
F13
Tabella 5.3 Differenze tra lunghezze valutate e fornite dei percorsi di raccolta
La tabella 6.4 illustra le durate dei singoli percorsi fornite, quelle valutate e le
differenze tra esse. La determinazione dei tempi di servizio è effettuata
dall’algoritmo in base sia alla lunghezza dei percorsi che alla tipologie degli
archi, da cui dipende la velocità di percorrenza ammissibile; in particolare i tratti
stradali, e quindi gli archi che le rappresentano, sono classificati in privati,
comunali, provinciali e statali ed ad ogni tipo è associato un certo valore della
velocità media di percorrenza di rispettivamente 20 km/h, 35 km/h, 50 km/h e 55
km/h.
Percorsi
F1
F2
F3
F4
F5
F6
F7
F8
F9
F10
F12
F13
Durata Totale
Fornita (h.m.s)
6.56.48
5.46.52
5.58.29
6.23.01
6.24.54
6.17.27
5.45.49
5.44.28
5.50.41
4.50.06
6.17.44
6.06.49
Durata Totale
Valutata (h.m.s)
6.48.27
5.43.32
5.57.24
6.22.20
6.22.52
6.05.49
5.28.43
5.36.15
5.47.01
4.49.58
6.00.09
5.57.06
Differenze Variazioni
(h.m.s)
0.08.21
-2,00%
0.03.20
-0,96%
0.01.05
-0,30%
0.00.41
-0,18%
0.02.02
-0,53%
0.11.38
-3,08%
0.17.06
-4,94%
0.08.13
-2,39%
0.03.40
-1,05%
0.00.08
-0,05%
0.17.35
-4,65%
0.09.43
-2,65%
Tabella 5.4 Durate fornite e valutate dei percorsi di raccolta
76
Capitolo 5 – Sperimentazione dell’algoritmo
I risultati complessivi sono sintetizzati nella tabella seguente.
Distanze e Durate
di Servizio
Valori
Valori
Differenze Variazioni
Forniti Valutati
Distanza Totale (km) 1.497,46 1.444,26
-53,21
-3,55%
932,51
899,19
-33,32
-3,57%
Distanza Raccolta (km) 564,95
545,07
-19,89
-3,52%
1.23.32
-1,92%
Distanza Vuoto (km)
Durata Totale (h.m.s) 72.23.08 70.59.36
Tabella 5.5 Distanze e durate complessive
I risultati mostrano che le durate e le distanze valutate dall’algoritmo di
ottimizzazione sono sempre inferiori o circa uguali a quelle misurate sulla rete
stradale. In particolare la differenza di lunghezza si attesta complessivamente
intorno al 3.5% e quella di durata intorno all’1,9%.
La successiva analisi dei risultati ha mostrato che tali differenze sono
riconducibili al fatto che la simulazione, pur rispettando l’attuale sequenza di
visita dei cassonetti, propone dei tragitti più convenienti per collegare i
cassonetti tra loro e con il deposito o la discarica, rispetto a quelli attualmente
utilizzati. Si riportano di seguito due esempi:
•
per il reparto Forese 9, il tragitto scelto dall’algoritmo per collegare i punti
raccolta P742 e P743 è più breve di circa il 25% di quello attuale;
•
per il reparto Forese 7, il tragitto scelto dall’algoritmo per collegare la
discarica al cassonetto da cui inizia il secondo carico è più breve di circa il
10% di quello attualmente utilizzato.
Le figure 6.1 e 6.2 illustrano i due casi presi ad esempio.
L’analisi condotta permette di affermare che la rete di archi modellata
rappresenta in modo coerente la rete stradale reale. Questa congruenza tra
modello e realtà rappresentata è stata ottenuta grazie al fatto che le fasi di
codifica dei dati e di anali dei risultati sono state supportate dall’esperienza di
gestione del personale di HERA.
Inoltre, questa prima serie di simulazioni propone soluzioni che migliorano,
seppur lievemente, l’attuale soluzione, in termini di riduzione delle durate e delle
distanze complessive del servizio, rispettando l’attuale ordine di raccolta dei
cassonetti.
77
Capitolo 5 – Sperimentazione dell’algoritmo
N
&
V
& P743
&V
V
101
&
V 196
W
E
68
S
75
&
V
Legenda
57
Strade Ravenna
&
V Contenitori
Tragitti
tragitto attuale: 589m
tragitto proposto:411m
V
&
&
V&
V
83
112
&
V
&
V
145
70
V
P742 &
65
58
&
V
&
V
71
&
V
0
100
200 Meters
Figura 5.1 Tragitto di collegamento tra due cassonetti del reparto F9
N
DISCARICA
RAVENNA
#
b
W
E
S
Legenda
Strade Ravenna
strade Ravenna
tragitto attuale: 17.898 m
tragitto proposto: 15.860 m
Contenitori
&
V inizio 2° carico F7
CIOLI
GUIC
&
V
#
b
DEPOSITO
E
LL
I
E
STR
DU
I
N
DE
M ONT I ATTI
LIO
0
5000
10000 Meters
Figura 5.2 Tragitto di collegamento tra la discarica ed un cassonetto del reparto F7
78
Capitolo 5 – Sperimentazione dell’algoritmo
5.3 Parametri di input e tipologie di simulazione
Il risultato della simulazione dipende dalla scelta dei valori da assegnare ai
parametri di input.
I parametri di input su cui si è agito sono i seguenti:
•
MIN_DIST: coefficiente di pesatura dei tempi di spostamento e delle
distanze dal punto al deposito e alla discarica;
•
Wvis: coefficiente di pesatura per il numero delle visite;
•
Wriemp: coefficiente di pesatura per il riempimento;
•
Wpos: coefficiente di pesatura della posizione rispetto al deposito e alla
discarica.
Per evidenziare l’influenza dei parametri di input sui risultati delle simulazioni,
si sono condotte, per ogni zona considerata, sei tipologie di simulazioni, che
sono illustrate nella tabella 6.6
Tipi di simulazione
A
A1
A2
B
B1
B2
MIN_DIST
0,1
0,1
0,1
0,9
0,9
0,9
Wvis
10.000.000
10.000.000
10.000.000
10.000.000
10.000.000
10.000.000
Wriemp
1.000
1.000
1
1.000
1.000
1
W_pos
1.000
1
1.000
1.000
1
1.000
Tabella 5.6 Tipologie di simulazioni
Le sperimentazioni condotte si dividono in due gruppi (pianificazioni di tipo A e
B), ognuno dei quali caratterizzato da due valori del coefficiente di pesatura
MIN_DIST. Questo parametro riflette gli effetti che la posizione di un punto
produce sulla determinazione delle priorità di servizio dello stesso ed è il
principale fattore nella determinazione della priorità del punteggio di inserzione
di un punto in un viaggio. Quindi nel gruppo di sperimentazioni di tipo A,
caratterizzato da un valore di MIN_DIST prossimo allo zero, è privilegiato
l’aspetto temporale, mentre nel gruppo di sperimentazioni di tipo B,
caratterizzato da un valore di MIN_DIST prossimo all’unità, è privilegiato
l’aspetto spaziale. In tutte le sperimentazioni il criterio di priorità per la
costruzione del viaggio è basato principalmente sulla numerosità delle visite
imposte dal profilo del punto (coefficiente Wvis) e secondariamente sul
riempimento medio giornaliero del punto (Wriemp) e sulla sua posizione rispetto
al deposito e alla discarica (Wpos), questi ultimi due in peso diverso secondo il
tipo di simulazione.
79
Capitolo 5 – Sperimentazione dell’algoritmo
5.4 Sommario dei dati
Le simulazioni che saranno condotte si basano su una serie di dati comuni, di cui
si riporta in seguito una sintesi.
•
•
•
•
Rete stradale:
o
Numero dei nodi: 3.711;
o
Numero degli archi: 5.166;
o
Numero dei punti raccolta: 811;
o
Numero dei cassonetti: 1.422.
Veicoli:
o
Tempo per svuotamento di singolo cassonetto: 1 min;
o
Tempo per le operazioni in discarica: 45 min;
o
Portata massima: 11.000 kg;
o
Lunghezza massima giornaliera percorribile: 1.000 km;
o
Costo orario: € 32,00;
o
Costo per svuotamento singolo cassonetto: € 2,75.
Operatore:
o
Tempo massimo ordinario dell’operatore: 6h;
o
Tempo massimo totale dell’operatore: 7h;
o
Costo orario ordinario dell’operatore: € 24,00;
o
Costo orario straordinario dell’operatore: € 31,20;
o
Durata della pausa dell’operatore: 15 min.
Profili di servizio: i punti raccolta considerati nella sperimentazione
richiedono tutti una frequenza settimanale di svuotamento pari a due
svuotamenti per settimana ed un intervallo massimo tra due svuotamenti
successivi pari a tre giorni.
•
Capacità dei cassonetti: i tipi di cassonetti utilizzati sono sei ed ognuno è
caratterizzato dalla seguenti capacità massiche:
o
Capacità_1: 325 kg;
o
Capacità_2: 375 kg;
o
Capacità_3: 425 kg;
o
Capacità_4: 450 kg;
o
Capacità_5: 600 kg;
o
Capacità_6: 800 kg.
Il numero dei cassonetti da servire ed il numero dei veicoli da utilizzare varia
secondo il tipo di simulazione.
80
Capitolo 5 – Sperimentazione dell’algoritmo
5.5 Ottimizzazione degli attuali reparti di raccolta
La prima fase della sperimentazione è stata condotta nel rispetto dell’attuale
raggruppamento dei cassonetti in reparti di raccolta. La scelta di rispettare
l’attuale clustering dei cassonetti deriva da una serie di considerazioni:
•
le simulazioni condotte rispettando l’attuale suddivisione dei cassonetti consentono un’analisi più approfondita dell’attuale organizzazione, poiché
permettono di evidenziare le zone di servizio più critiche o quelle
potenzialmente migliorabili;
•
l’attuale organizzazione del servizio si basa su un raggruppamento dei
cassonetti in zone di servizio corrispondenti alle diverse località del comune
di Ravenna e questa soluzione ha dei vantaggi legati al fatto che la
soluzione è da tempo in uso e quindi già ben memorizzata dagli operatori ed
è facilmente modificabile qualora siano aggiunti ulteriori cassonetti nelle
singole località, eventualità non remota visto che le zone in esame sono
oggetto di una spiccata espansione urbanistica;
•
una soluzione che migliora,in termini di minimizzazione dei tempi e delle
distanze, l’attuale organizzazione, senza però stravolgerla, è comunque
auspicabile, perché non richiederebbe una riorganizzazione complessiva del
servizio ed un nuovo addestramento del personale.
Per ogni zona sono state eseguiti i sei tipi di simulazioni descritti in precedenza
ed è stata riportata la soluzione migliore in termini di minimizzazione delle
distanze e dei tempi totali del servizio.
Ogni soluzione di pianificazione è caratterizzata da una serie di parametri
prestazionali, così raggruppabili:
•
Caratteristiche del viaggio: viaggio, giorno raccolta, numero di punti serviti,
numero di cassonetti serviti, carico, numero di punti sovraccarichi.
•
Tempi: tempo per spostarsi tra i punti di raccolta (tempo raccolta), tempo
per spostarsi dalla zona di servizio al deposito o alla discarica (tempo a
vuoto), tempo per svuotare i cassonetti (tempo di svuotamento), tempo del
servizio.
•
Distanze: distanza di raccolta, distanza a vuoto, distanza totale.
•
Costi: costo di svuotamento, costo del servizio e costo totale.
•
Coefficienti di efficienza: produttività in termini di chilogrammi di rifiuti
raccolti all’ora o al chilometro, coefficiente di utilizzo del veicolo.
81
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.1 Ottimizzazione del reparto Forese 1
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
54
118
1
Reparto Forese 1
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì lunedì e giovedì
54
54
108
118
118
236
20.592
15.444
36.036
2
2
4
6.56.48
6.56.48
13.53.36
120,042 120,042
240,084
58,47
58,470
116,940
178,512 178,512
357,024
€ 325,00 € 325,00
€ 650,00
€ 396,00 € 396,00
€ 792,00
€ 721,00 € 721,00
€ 1.442,00
2.964,299 2.223,225
2.593,762
115,354
86,515
100,934
0,936
0,702
0,819
Reparto Forese 1
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Ottimizzazione A
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì lunedì e giovedì
54
54
108
118
118
236
20.592
15.444
36.036
2
2
4
0
0
0
3.15.00
3.14.58
6.29.58
1.29.56
1.28.59
2.58.55
1.58.00
1.58.00
3.56.00
6.42.56
6.41.57
13.24.53
84,166
84,235
168,401
81,002
80,002
161,004
165,168 164,237
329,405
€ 325,00 € 325,00
€ 650,00
€ 382,00 € 380,00
€ 762,00
€ 707,00 € 705,00
€ 1.412,00
3.066,314 2.305,361
2.686,302
124,673
94,035
109,397
0,936
0,702
0,819
Tabelle 5.7 Dati relativi alla pianificazione del reparto F1
82
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 1
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.28.43
-71,683
44,064
-27,619
-€ 30,00
-€ 30,00
92,540
8,463
Variazioni
-3,44%
-29,86%
37,68%
-7,74%
-3,79%
-2,08%
3,57%
8,38%
Tabella 5.8 Differenze tra soluzione ottimizzata ed attuale per il reparto F1
La soluzione proposta dalla simulazione riesce a migliorare la soluzione attuale
in termini totali grazie ad una riduzione notevole della componente a vuoto.
La diminuzione della componente a vuoto è ottenuta mediante un diverso
raggruppamento dei cassonetti tra primo e secondo carico, che permette lo
spostamento dell’inizio e della fine dei carichi in corrispondenza di cassonetti
più vicini alla discarica. E’ da notare la diminuzione della distanza a vuoto
comporta un aumento della distanza di raccolta, ma tale aumento sia è inferiore
in termini percentuali, sia ha minore incidenza sulla distanza totale, poiché per
questo reparto la distanza a vuoto incide di oltre il 65% sulla distanza totale.
400
350
300
250
168
240
200
150
100
50
161
117
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.1 Differenze tra distanze ottimizzate e distanze attuali per il reparto F1
83
Capitolo 5 – Sperimentazione dell’algoritmo
38
1 21
07
1 45
56
8
74P
1 2 5
7
&&
V
V
&
V
&
V
V&
&
V
&
V
V
&
V
&
V
&
V
&
V
&
V
&
N
W
E
V
&
&&
V
V
S
V
&&
V
V
&
V
&
&
V
Legenda
b
&
V
V
&
#
Strade Ravenna
Strade Cervia
Contenitori
V 1° carico
&
V 2° carico
&
DISCARICA
SAVIO
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&&
V
V
V
V&
&
V&
&
V
&
V
&
V&
&
V
&
V
V
&
&
V
V &
&
V
0
8000
16000 Meters
Figura 5.3 Soluzione attuale per il reparto Forese 1
83
1 12
07
1 54
65
8
74 2 5
1P
7
&&
V
V
&
V
&
V
V&
V
V&
&
V
&
V
&
V
&
V
&
V
&
N
W
E
V
&
&&
V
V
S
V
&&
V
&
V
V
&
Legenda
b
#
DISCARICA
SAVIO
V
&&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
V
&
&
V
V
&
V
&
V&
&
V
&
V
&
V
V&
&
V
V
V&
&
V&
&
V
&
V
&
&
V
V
&
V
&
V
&
V &
V&
&
V
0
8000
16000 Meters
Figura 5.4 Soluzione ottimizzata per il reparto Forese 1
84
Strade Ravenna
Strade Cervia
Contenitori
V 1° carico
&
V 2° carico
&
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.2 Ottimizzazione del reparto Forese 2
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
Reparto Forese 2
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Reparto Forese 2
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
79
119
1
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
martedì venerdì martedì e venerdì
79
79
158
119
119
238
20.520 15.390
35.910
2
2
4
5.46.52 5.46.52
11.33.44
38,658 38,658
77,316
72,735 72,735
145,470
111,393 111,393
222,786
€ 327,00 € 327,00
€ 654,00
€ 323,00 € 323,00
€ 646,00
€ 650,00 € 650,00
€ 1.300,00
3.549,491 2.662,118
3.105,804
184,213 138,159
161,186
0,933
0,700
0,816
Ottimizzazione B1
Viaggio 1 Viaggio 2
Soluzione
martedì
venerdì martedì e venerdì
79
79
158
119
119
238
20.520
15.390
35.910
2
2
4
0
0
0
2.10.41
2.11.33
4.22.14
1.28.42
1.42.03
3.10.45
1.59.00
1.59.00
3.58.00
5.38.23
5.52.36
11.30.59
27,173
27,862
55,035
76,110
87,619
163,729
103,283 115,481
218,764
€ 327,00 € 327,00
€ 654,00
€ 316,00 € 329,00
€ 645,00
€ 643,00 € 656,00
€ 1.299,00
3638,477 2.618,832
3.118,165
198,677 133,269
164,149
0,933
0,700
0,816
Tabelle 5.9 Dati relativi alla pianificazione del reparto F2
85
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 2
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.02.45
-22,281
18,259
-4,022
-€ 1,00
-€ 1,00
12,361
2,963
Variazioni
-0,40%
-28,82%
12,55%
-1,81%
-0,15%
-0,08%
0,40%
1,84%
Tabella 5.10 Differenze tra soluzione ottimizzata ed attuale per il reparto F2
La soluzione è pressoché identica a quella attuale in termini totali.
In questo caso la diminuzione della componente a vuoto si traduce direttamente
in un aumento della componente di raccolta. E’ da notare poi che per questo
reparto la distanza a vuoto incide solo di un 30% sulla distanza totale, poiché la
zona di interesse è vicina al deposito e alla discarica e, quindi, in termini di
variazione percentuale la diminuzione della distanza a vuoto è maggiore
dell’aumento della distanza di raccolta, ma in termini di chilometri le due
variazioni si compensano. Per questa zona l’ottimizzazione del servizio è
strettamente legata alla minimizzazione della componente di raccolta, ma, una
volta assegnati i cassonetti da servire, i percorsi di raccolta possibili sono
praticamente obbligati.
250
200
55
77
150
100
164
145
50
0
Soluzione
Attuale
Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.2 Differenze tra distanze ottimizzate e distanze attuali per il reparto F2
86
Capitolo 5 – Sperimentazione dell’algoritmo
&
V
V
&
N
V
&&
V&
VV
&
V
&
&&
V
V&
V
V
&
V
&
V
&
V
&
V&
&
V
V
&
V
V
&
V&
&
V&
V
&
V
&
V
&
V
&
V
&
V
&
V
V
&
V
&
V
&
V&
&
V
&
V
&
V&
&
V&
V &
V
&
V&
&
V&
V
V&
&
VV
V&
V
&
V
&&
VV
&
V
&
V
&
V
V
&
V
&
V&
V&
&
V
&
&
V
W
S
b
DISCARICA
RAVENNA
E
#
Legenda
&
V
V&
&
V
&
V
V
&
&
V
V
&
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
CIOLI
GUIC
V
&
V
&
V
&
&
V
V
&
DEPOSITO
b
#
&
VV
&
V
&
0
6000
12000 Meters
Figura 5.5 Soluzione attuale per il reparto Forese 2
&
V
V
&
N
V
&&
V&
V V
&
V
&
&&
V
V&
V
V
&
V
&
V
&
V&
&
V
V
&
V
V
&
V&
&
V&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V&
&
V
V &
&
V&
&
V&
V&
V
V&
&
VV
V&
V
&
V
&
V
&
V
V
&
V
&
V&
V&
&
V
&
&
V
&
VV
V&
&
W
S
b
DISCARICA
RAVENNA
E
#
Legenda
&
V
V&
&
V
&
V
V
&
&
V
V
&
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
CIOLI
GUIC
V
&
V
&
V
&&
V
V
&
DEPOSITO
b
#
&
VV
&
V
&
0
6000
12000 Meters
Figura 5.6 Soluzione attuale per il reparto Forese 2
87
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.3 Ottimizzazione del reparto Forese 3
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
74
129
1
Reparto Forese 3
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
mercoledì sabato mercoledì e sabato
74
74
148
129
129
258
20.468
15.351
35.819
2
2
4
5.58.29
5.58.29
11.56.58
69,178
69,178
138,356
45,293
45,293
90,586
114,471 114,471
228,942
€ 355,00 € 355,00
€ 710,00
€ 335,00 € 335,00
€ 670,00
€ 690,00 € 690,00
€ 1.380,00
3.425,766 2.569,324
2.997,545
178,805 134,104
156,454
0,930
0,698
0,814
Reparto Forese 3
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Viaggio 1
mercoledì
74
129
20.468
2
0
3.07.10
0.42.10
2.08.00
5.57.20
78,174
37,408
115,582
€ 355,00
€ 334,00
€ 689,00
3436,791
177,086
0,930
Ottimizzazione B
Viaggio 2
Soluzione
sabato mercoledì e sabato
74
148
129
258
15.351
35.819
2
4
0
0
3.00.13
6.07.23
0.46.19
1.28.29
2.08.00
4.16.00
5.54.32
11.51.52
70,466
148,640
41,240
78,648
111,706
227,288
€ 355,00
€ 710,00
€ 331,00
€ 665,00
€ 686,00
€ 1.375,00
2.597,950
3.019,020
137,423
157,593
0,698
0,814
Tabelle 5.11 Dati relativi alla pianificazione per il reparto F3
88
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 3
Tempo Tot.(h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.05.06
10,284
-11,938
-1,654
€ 0,00
-€ 5,00
-€ 5,00
21,475
1,139
Variazioni
-0,71%
7,43%
-13,18%
-0,72%
0,00%
-0,75%
-0,36%
0,72%
0,73%
Tabella 5.12 Differenze tra soluzione ottimizzata ed attuale per il reparto F3
La soluzione proposta dalla simulazione è molto simile alla soluzione attuale in
termini di durate e distanze totali del servizio. In questo caso, la diminuzione
della componente di raccolta è praticamente ininfluente, poiché è accompagnata
da un aumento della componente a vuoto, che, seppur inferiore in termini
percentuali, è praticamente uguale in termini di chilometri, dato che per questo
reparto la distanza a vuoto è la componente preponderante della distanza totale.
250
200
150
138
148
90
79
100
50
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.3 Differenze tra distanze ottimizzate e distanze attuali per il reparto F3
89
Capitolo 5 – Sperimentazione dell’algoritmo
47P 3
0 1
1
9 6
1
6
8
75
75
38
1 12
07
1 45
56
V
&
V
&
V&
&
&&
V
V
V
V
V&
&
V
&
V&
&
V
V
&
V&
&
V
&
V&
V
&
V
&
V
V
V&
&
V
&
V&
&
V
&
V
V
&
V
&
47P 2
1
7
8
5
N
&
V
V
&
V
&
W
E
V
&
V
&
S
V
&
V
&
V
&
V
V
&&
V
V
&
V
&
V&
&
V&
&
V
V&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
Legenda
V
&
&
V
Strade Ravenna
Strade Cervia
Contenitori
V 1° carico
&
V 2° carico
&
V
&&
V
V&
&
&
V
V
V&
V&
&
V
V
&
V
&
V&
V&
&
V
V
&
V&
&
V
&
V
&
V
&
V
&
V
&
V
V
&
V
&
DISCARICA
SAVIO
#
0
4000
b
8000 Meters
Figura 5.7 Soluzione attuale per il reparto Forese 3
47P 3
9 6
1
0 1
1
6
8
57
75
38
1 12
07
1 54
56
V
&
&
V
V
V&
&
V
&
V
&
V
V&
&
V
&
V&
&
V
V
&
V&
&
V
&
V&
V
&
V
&
V
V
V&
&
V
&
V&
&
V
&
V
V
&
V
&
1
7
47P 2
8
5
N
&
V
V
&
V
&
W
E
V
&
V
&
S
V
&
V
&
V
&
V
V
&&
V
V
&
V
&
V&
&
V&
&
V
V&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
Legenda
V
&
&
V
Strade Ravenna
Strade Cervia
Contenitori
V 1° carico
&
V 2° carico
&
V
&&
V
V&
&
&
V
VV
V&
&
V
&
V
&
V
&
V&
V&
&
V
V
&
V&
&
V
&
V
&
V
V
&
V
&
V
V&
&
V
&
DISCARICA
SAVIO
#
0
4000
b
8000 Meters
Figura 5.8 Soluzione ottimizzata per il reparto Forese 3
90
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.4 Ottimizzazione del reparto Forese 4
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
70
106
1
Reparto Forese 4
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì
lunedì e giovedì
70
70
140
106
106
212
20.420
15.315
35.735
2
2
4
6.23.01
6.23.01
12.46.02
113,124 113,124
226,248
51,057
51,057
102,114
164,181 164,181
328,362
€ 292,00 € 292,00
€ 584,00
€ 360,00 € 360,00
€ 720,00
€ 652,00 € 652,00
€ 1.304,00
3.198,816 2.399,112
2.798,964
124,375
93,281
108,828
0,928
0,696
0,812
Reparto Forese 4
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Ottimizzazione B1
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì
lunedì e giovedì
70
70
140
106
106
212
20.420
15.315
35.735
2
2
4
0
0
0
3.28.40
3.23.19
6.51.59
1.09.13
1.08.41
2.17.54
1.46.00
1.46.00
3.32.00
6.23.53
6.18.00
12.41.53
105,977 101,203
207,180
59,363
60,257
119,620
165,340 161,460
326,800
€ 292,00 € 292,00
€ 584,00
€ 361,00 € 355,00
€ 716,00
€ 653,00 € 647,00
€ 1.300,00
3191,595 2.430,952
2.814,210
123,503
94,853
109,348
0,928
0,696
0,812
Tabelle 5.13 Dati relativi alla pianificazione del reparto F4
91
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 4
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.04.09
-19,068
17,506
-1,562
-€ 4,00
-€ 4,00
15,246
0,520
Variazioni
-0,54%
-8,43%
17,14%
-0,48%
-0,56%
-0,31%
0,54%
0,48%
Tabella 5.14 Differenze tra soluzione ottimizzata ed attuale per il reparto F4
La soluzione proposta dalla simulazione è simile alla soluzione attuale in termini
di durate e distanze totali del servizio. L’analisi dei risultati è simile a quella
condotta per il reparto Forese 2: la diminuzione della distanza a vuoto è
accompagnata da un aumento proporzionale della distanza di raccolta, poiché la
diminuzione della componente a vuoto è ottenuta esclusivamente mediante lo
avvicinamento dei punti di inizio e fine carico al deposito ed alla discarica.
350
300
250
200
226
207
102
119
150
100
50
0
Soluzione
Attuale
Dist. Raccolta (km)
Soluzione
Proposta
Dist. Vuoto (km)
Grafico 5.4 Differenze tra distanze ottimizzate e distanze attuali per il reparto F4
92
Capitolo 5 – Sperimentazione dell’algoritmo
V
&
V&
&
V
V&
&
V
&&
VV
&
V
V&
V
&
V
&
&
V
V
&
V&
V &
&
V
&&
V
V
V
&
V
V&
&
V
&
V
&
V&
V
V&
V&
&
V
V
V&
&
V
&
V&
V&
&
&
V
&&
V
V
V
&
V
V&
&
V
&
N
V
V&
V&
&
V&
W
E
S
V&
&
&&
V
V&
V
V&
V
V&
&
V&
&
V
&
V
V
V
V&
&
V
V&
V&
&
V
&
Legenda
V&
&
V
V&
V&
&
V
V
&
V&
&
V
&
V
&
V&
V
V
&
V
&
V
&
&
V
V&
&
V
V
&
&
V
V&
&
V&
V
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
&
V
V
&
V
&
&
V
V&
&
V
0
4000
8000 Meters
Figura 5.9 Soluzione attuale per il reparto Forese 4
V
&
V&
&
V
V&
&
V
V
&
V&
V
V&
V&
&
V
V
V&
&
V
&
V&
V&
&
V
&
&&
V
V
V
&
V
V&
&
&&
VV
&
V
V&
V
&
V
&
V
&
V
&
V&
& &
V
V
V&
&
V
V
&
V
V&
&
V
&
V
&
N
V
V&
V&
&
V&
W
E
S
V&
&
&&
V
V&
V
V&
V
V&
&
V&
&
V
&
V
V
V
V&
&
V
V &
V&
&
V
&
Legenda
V&
&
V
V&
V&
&
V
V
&
V&
&
&
V
V
&
V
&
V&
V
V
&
V
&
V
&
&
V
V&
&
V
V
&
&
V
V&
&
V&
V
0
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
&
V
V
&
V
&
V
&
&
V
V&
&
V
4000
8000 Meters
Figura 5.10 Soluzione ottimizzata per il reparto Forese 4
93
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.5 Ottimizzazione del reparto Forese 5
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
Reparto Forese 5
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Reparto Forese 5
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
1
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
martedì
venerdì martedì e venerdì
68
68
136
108
108
216
20.420
15.315
35.735
2
2
4
6.24.54
6.24.54
12.49.48
100,519 100,519
201,038
52,566
52,566
105,132
153,085 153,085
306,170
€ 297,00 € 297,00
€ 594,00
€ 362,00 € 362,00
€ 724,00
€ 659,00 € 659,00
€ 1.318,00
3.183,164 2.387,373
2.785,269
133,390 100,042
116,716
0,928
0,696
0,812
Viaggio 1
martedì
68
108
20.420
2
0
3.28.20
0.59.21
1.48.00
6.15.41
95,121
50,287
145,408
€ 297,00
€ 352,00
€ 649,00
3261,257
140,432
0,928
Ottimizzazione B
Viaggio 2
Soluzione
venerdì martedì e venerdì
68
136
108
216
15.315
35.735
2
4
0
0
3.25.39
6.53.59
1.03.35
2.02.56
1.48.00
3.36.00
6.17.14
12.32.55
92,714
187,835
54,442
104,729
147,156
292,564
€ 297,00
€ 594,00
€ 354,00
€ 706,00
€ 651,00
€ 1.300,00
2.435,893
2.847,726
104,073
122,144
0,696
0,812
Tabella 5.15 Dati relativi alla pianificazione del reparto F5
94
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
tabella seguente.
Reparto Forese 5
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.16.53
-13,203
-0,403
-13,606
-€ 18,00
-€ 18,00
62,457
5,428
Variazioni
-2,19%
-6,57%
-0,38%
-4,44%
-2,49%
-1,37%
2,24%
4,65%
Tabella 5.16 Differenze tra soluzione ottimizzata ed attuale per il reparto F5
La soluzione proposta dalla simulazione permette di migliorare la soluzione
attuale in termini totali, mediante una diminuzione della componente a vuoto.
Tale diminuzione è un miglioramento effettivo, vale a dire è ottenuta mediante
un diverso raggruppamento dei cassonetti tra primo e secondo carico e quindi
non si traduce in un aumento della componente di raccolta (che infatti rimane
pressoché uguale) ed ha un effetto globale rilevante, poiché per questo reparto la
distanza a vuoto incide di circa il 65% sulla distanza totale.
350
300
250
200
201
188
105
104
150
100
50
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.5 Differenze tra distanze ottimizzate e distanze attuali per il reparto F5
95
Capitolo 5 – Sperimentazione dell’algoritmo
V
&
V
V&
V
&
&&
V
V
&
V
&
N
W
&
V
V&
&
V
V
&
V
&
V
&
E
S
V&
&
V
V
&
V&
& &
V
V
&
V
&
V&
&
V&
&
V
&
V
V
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
&
V
V
&
V
&
V
&
V
&
V&
&
V
V
&
V
&
V
&
V
&
V
&
V
V
&
V&
&
V&
V&
V&
&
V
&
V&
&
V
&
V
&
V
&
V&
&
VV
V&
V
V
&
V
&
V&
V
&
V &
V
V&
&
V
&
DISCARICA
SAVIO
Legenda
b
#
Strade Ravenna
Strade Cervia
Contenitori
V 1° carico
&
V 2° carico
&
&
V
V
&
V&
&
V&
V
0
4000
8000 Meters
Figura 5.11 Soluzione attuale per il reparto F5
V
&
V
V&
V
&
&&
V
V
&
V
&
N
W
V
&
V
V
&&
V
&
V
&
V
&
E
S
V&
&
V
V
&
V&
& &
V
V
&
V
&
V&
&
V&
&
V
V
V&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
&
V
V
&
V
&
V
&
V
&
V&
&
V
V
&
V
&
V
&
V
&
V
&
V
V
&
V&
&
V&
V&
V&
V
&
V&
&
V
&
V&
&
V&
&
VV
VV
&
V&
V
&
V&
V
&
V &
V
V&
&
V
&
DISCARICA
SAVIO
b
Legenda
#
Strade Ravenna
Strade Cervia
Contenitori
V 1° carico
&
V 2° carico
&
&
V
V
&
V&
&
V&
V
0
4000
8000 Meters
Figura 5.12 Soluzione ottimizzata per il reparto Forese 5
96
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.6 Ottimizzazione del reparto Forese 6
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
Reparto Forese 6
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Reparto Forese 6
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
69
103
1
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
mercoledì sabato mercoledì e sabato
69
69
138
103
103
206
20.528
15.396
35.924
2
2
4
6.17.27
6.17.27
12.34.54
111,404 111,404
222,808
43,673
43,673
87,346
155,077 155,077
310,154
€ 283,00 € 283,00
€ 566,00
€ 354,00 € 354,00
€ 708,00
€ 637,00 € 637,00
€ 1.274,00
3.263,161 2.447,371
2.855,266
132,373
99,280
115,826
0,933
0,700
0,816
Viaggio 1
mercoledì
69
103
20.528
2
0
3.29.52
0.46.49
1.43.00
5.59.41
98,983
39,028
138,011
€ 283,00
€ 336,00
€ 619,00
3.424,345
148,742
0,933
Ottimizzazione A1
Viaggio 2
Soluzione
sabato mercoledì e sabato
69
138
103
206
15.396
35.924
2
4
0
0
3.29.52
6.59.44
0.46.33
1.33.22
1.43.00
3.26.00
5.59.25
11.59.06
98,983
197,966
38,808
77,836
137,791
275,802
€ 283,00
€ 566,00
€ 335,00
€ 671,00
€ 618,00
€ 1.237,00
2.570,165
2.997,413
111,734
130,253
0,700
0,816
Tabella 5.17 Dati relativi alla pianificazione del reparto F6
97
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 6
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.35.48
-24,842
-9,510
-34,352
-€ 37,00
-€ 37,00
142,148
14,427
Variazioni
-4,74%
-11,15%
-10,89%
-11,08%
-5,23%
-2,90%
4,98%
12,46%
Tabella 5.18 Differenze tra soluzione ottimizzata ed attuale per il reparto F6
La soluzione proposta dalla simulazione migliora notevolmente la soluzione
attuale, grazie alla diminuzione sia della distanza a vuoto sia della distanza di
raccolta. E’ da notare che la soluzione ottimizzata mantiene la stessa
suddivisione dei cassonetti tra primo e secondo carico della soluzione attuale: la
diminuzione della distanza a vuoto è ottenuta mediante lo spostamento dei punti
d’inizio e di fine carico più a nord verso la discarica e il deposito e
l’individuazione di tragitti di collegamento più brevi; la diminuzione della
distanza di raccolta è ottenuta mediante una diversa sequenza di visita dei
cassonetti, che permette di ridurre gli spostamenti tra i diversi punti di raccolta.
350
300
250
200
223
198
150
100
50
87
77
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.6 Differenze tra distanze ottimizzate e distanze attuali per il reparto F6
98
Capitolo 5 – Sperimentazione dell’algoritmo
V
&
N
W
&
V
V
&
V
V&
&
V
&
V&
&
V
V&
V&
V&
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V&
&
V&
V
V
&
V&
&
V
V
&
V
&
V&
&
V&
&
V&
V
V &
V
V&
V&
&
V
V
&
V
&
V&
&
V
V
&&
V
V&
&
V
V&
V&
&
V
V&
&
V
V
&
V&
V
&
V&
&
V
&
V
&
V
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V&
V&
&
V
V&
E
S
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
&
V
V
&
V&
V&
&
V
&
V
V
&
V
&
V
&
V
&
0
3000
6000 Meters
Figura 5.13 Soluzione attuale per il reparto Forese 6
V
&
N
W
&
V
V
V
&
V&
&
V
&
V&
&
V
V&
V&
V
&
V
V&
&
V
&
V
&
V&
&
V
V
&
V&
&
V&
V
V
&
V&
&
V
V
&
V
&
V&
&
V&
&
V&
V
V &
V
V&
V&
&
V
V
&
V
&
V
&
V&
V
&&
V
V&
&
V
V&
V&
&
V
V&
&
V
V
V&
V&
&
V&
&
V
&
V
&
V
&
V&
V
V
&
V
&
V
&
V
&
V
&
V
&
V&
V&
&
V
V&
E
S
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
&
V
V
&
V&
V&
&
V
&
V
V
&
V
&
V
&
V
&
0
3000
6000 Meters
Figura 5.14 Soluzione ottimizzata per il reparto Forese 6
99
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.7 Ottimizzazione del reparto Forese 7
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
72
118
1
Reparto Forese 7
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì lunedì e giovedì
72
72
144
118
118
236
20.408
15.306
35.714
2
2
4
5.45.49
5.45.49
11.31.38
71,252
71,252
142,504
30,324
30,324
60,648
101,576 101,576
203,152
€ 325,00 € 325,00
€ 650,00
€ 323,00 € 323,00
€ 646,00
€ 648,00 € 648,00
€ 1.296,00
3.540,836 2.655,627
3.098,231
200,914 150,685
175,799
0,928
0,696
0,812
Reparto Forese 7
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Ottimizzazione B1
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì lunedì e giovedì
72
72
144
118
118
236
20.408
15.306
35.714
2
2
4
0
0
0
2.56.12
2.52.58
5.49.10
0.40.55
0.37.38
1.18.33
1.58.00
1.58.00
3.56.00
5.35.07
5.28.36
11.03.43
66,931
63,503
130,434
34,332
31,727
66,059
101,263
95,230
196,493
€ 325,00 € 325,00
€ 650,00
€ 313,00 € 307,00
€ 620,00
€ 638,00 € 632,00
€ 1.270,00
3653,892 2.794,766
3.228,546
201,535 160,727
181,757
0,928
0,696
0,812
Tabella 5.19 Dati relativi alla pianificazione del reparto F7
100
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 7
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.27.55
-12,070
5,411
-6,659
-€ 26,00
-€ 26,00
130,315
5,958
Variazioni
-4,04%
-8,47%
8,92%
-3,28%
-4,02%
-2,01%
4,21%
3,39%
Tabella 5.20 Differenze tra soluzione ottimizzata ed attuale per il reparto F7
La soluzione proposta dalla simulazione migliora la soluzione attuale in termini
totali, mediante una riduzione della componente a vuoto. Tale diminuzione è
accompagnata da un aumento della componente di raccolta, che comunque ha
minore incidenza globale, poiché per questo reparto la distanza a vuoto è la parte
preponderante della distanza totale. E’ da notare che l’aumento della distanza di
raccolta dipende sostanzialmente dalla modalità di suddivisione dei cassonetti tra
primo e secondo carico: nella soluzione attuale i due carichi si dividono in modo
abbastanza netto la zona d’interesse, mentre nella soluzione proposta le due zone
si sovrappongono, per cui entrambi i viaggi di fatto attraversano l’intera zona.
D’altra parte questa scelta ha il vantaggio di ridurre notevolmente i tragitti per
spostarsi dal deposito e dalla discarica ai punti di raccolta.
250
200
150
142
130
61
66
100
50
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.7 Differenze tra distanze ottimizzate e distanze attuali per il reparto F7
101
Capitolo 5 – Sperimentazione dell’algoritmo
V
&
V
&
V
&
V&
V&
&&
V
V&
V
&
V
V&
&
V&
&
V
V&
&
V
V&
V
&
V
&
V
&
V
&
VV
V&
&
V &
V&
&
V&
V
&
V
V
&
V&
V
V&
V
V&
V&
V&
V&
&
V&
V
&
V&
V&
V &
V&
V&
V &
&
V&
V&
V&
&
V
V
&
V
&
V&
&
V&
&
V
V&
V&
V
V
&
&
V
V
&
&
V
V
V&
&
V
&
&
V
V
V &
&
V
&
V
&
N
W
E
S
V
&
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
V
&
&
V
V
&
V&
V&
&
V&
V&
V
&
V&
V&
V&
V
&
V&
V&
V&
V
V&
VV&
&
V&
V
V
V&
&
V&
V&
&
V &
&
V
V&
&
VV&
V
&
0
2000
4000 Meters
Figura 5.15 Soluzione attuale per il reparto Forese 7
V
&
V
&
V
&
V&
V&
&&
V
V&
V
&
V
V&
&
V&
&
V
&
V&
&
V
V&
V
&
V
V
&
V
&
VV
V&
&
V &
V&
&
V&
V
&
V&
V
&
V&
V
V&
V&
V&
V
V&
V&
&
V&
V
&
V
&
V
&
V &
&
V&
V&
V &
&
V
&
V
V
&
V
V
&
V
&
V&
&
V&
&
V
V&
V&
V
V
&
&
V
V
&
&
V
V
V&
&
V&
&
V
V
V&
&
V
&
V
&
V
&
W
E
S
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
&
V
V
&
V
&
V
&
V&
V&
&
V&
V&
V
&
V&
V&
V&
V
&
V&
V&
V&
V
&
V
VV&
&
V&
V
V
V&
&
V&
V&
&
V &
&
V
V
V&
&
V &
V
&
0
N
2000
4000 Meters
Figura 5.16 Soluzione ottimizzata per il reparto Forese 7
102
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.8 Ottimizzazione del reparto Forese 8
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
Reparto Forese 8
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Reparto Forese 8
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
66
114
1
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
mercoledì sabato mercoledì e sabato
66
66
132
114
114
228
20.536
15.402
35.938
2
2
4
5.44.28
5.44.28
11.28.56
63,878
63,878
127,756
43,956
43,956
87,912
107,834 107,834
215,668
€ 314,00 € 314,00
€ 628,00
€ 321,00 € 321,00
€ 642,00
€ 635,00 € 635,00
€ 1.270,00
3.577,008 2.682,756
3.129,882
190,441 142,831
166,636
0,933
0,700
0,817
Viaggio 1
mercoledì
66
114
20.536
2
0
2.50.56
0.49.59
1.54.00
5.34.55
60,640
41,747
102,387
€ 314,00
€ 313,00
€ 627,00
3679,005
200,572
0,933
Ottimizzazione B
Viaggio 2
Soluzione
sabato mercoledì e sabato
66
132
114
228
15.402
35.938
2
4
0
0
2.49.56
5.40.52
0.47.51
1.37.50
1.54.00
3.48.00
5.31.47
11.06.42
61,241
121,881
40,259
82,006
101,500
203,887
€ 314,00
€ 628,00
€ 310,00
€ 623,00
€ 624,00
€ 1.251,00
2.785,312
3.234,258
151,744
176,264
0,700
0,817
Tabella 5.21 Dati relativi alla pianificazione del reparto F8
103
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 8
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.22.14
-5,875
-5,906
-11,781
-€ 19,00
-€ 19,00
104,376
9,629
Variazioni
-3,23%
-4,60%
-6,72%
-5,46%
-2,96%
-1,50%
3,33%
5,78%
Tabella 5.22 Differenze tra soluzione ottimizzata ed attuale per il reparto F8
La soluzione proposta dalla simulazione migliora la soluzione attuale, mediante
una diminuzione congiunta della distanza a vuoto e della distanza di raccolta,
ottenuta grazie ad una nuova ripartizione dei cassonetti tra primo e secondo
carico, che prevede di servire per primi e per ultimi i cassonetti più vicini al
deposito e alla discarica.
250
200
150
127
121
100
50
88
82
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.8 Differenze tra distanze ottimizzate e distanze attuali per il reparto F8
104
Capitolo 5 – Sperimentazione dell’algoritmo
V
V&
&
V
V
&&
V&
&
V&
V&
&
V
V&
V
&
V
V
V
&
V
V
&
V&
&
V
V
&
V&
&
V&
&
V
&
V&
&
V&
&
V
V
V
&
V
&
V
&
V&
V&
&
V&
V
V
&
V
&
V
&
V
&
V&
&
V&
V&
V
&
V
&
V
&
V
&
V&
V&
V
&
V
&
V
V&
&
V&
&
V
&
V
V
V
&
V
&
N
W
E
S
V
&
V&
V
V&
&
V
&
V&
V&
&&
V
V
&&
V
V&
V&
V
&
V
&
VV
&
Legenda
V
&
V&
&
V
&&
V
V
V
V V
&
V&
&
&
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
&&
V
V
V
&
V
&
&&
V
V&
V&
V&
V
V&
V
&&
V
0
4000
8000 Meters
Figura 5.17 Soluzione attuale per il reparto Forese 8
V
V&
&
V
V
&&
V&
&
V&
V&
&
V
V&
V
&
V
V
V
&
V
V
&
V&
&
V
V
&
V&
&
V
&
V
&
V&
&
V&
&
V
V
&
V
&
V
&
V
&
V
V&
&
V&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V &
&
V&
&
V
V&
V
V
&
V
&
V&
&
V&
&
V
V
&
V
&
V
V
&
V
&
N
W
E
S
V
&
V&
V
V&
&
V
&
V&
V&
&&
V
V
&&
V
V&
V&
V
&
VV
&
Legenda
V
&
V&
&
V
&&
V
V
V
V V
&
V&
&
&
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
&&
V
V
V
&
V
&
&&
V
V&
V&
V&
V
V&
V
&&
V
0
4000
8000 Meters
Figura 5.18 Soluzione ottimizzata per il reparto Forese 8
105
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.9 Ottimizzazione del reparto Forese 9
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
Reparto Forese 9
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Reparto Forese 9
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
81
138
1
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
martedì
venerdì martedì e venerdì
81
81
162
138
138
276
20.548
15.411
35.959
2
2
4
5.50.41
5.50.41
11.41.22
59,259
59,259
118,518
34,782
34,782
69,564
94,041
94,041
188,082
€ 380,00 € 380,00
€ 760,00
€ 327,00 € 327,00
€ 654,00
€ 707,00 € 707,00
€ 1.414,00
3.515,650 2.636,738
3.076,194
218,500 163,875
191,188
0,934
0,701
0,817
Viaggio 1
martedì
81
138
20.548
2
0
2.43.38
0.39.00
2.18.00
5.40.38
55,844
30,974
86,818
€ 380,00
€ 318,00
€ 698,00
3619,376
236,679
0,934
Ottimizzazione B
Viaggio 2
Soluzione
venerdì martedì e venerdì
81
162
138
276
15.411
35.959
2
4
0
0
2.46.40
5.30.18
0.35.15
1.14.15
2.18.00
4.36.00
5.39.55
11.20.33
58,052
113,896
27,614
58,588
85,666
172,484
€ 380,00
€ 760,00
€ 317,00
€ 635,00
€ 697,00
€ 1.395,00
2.720,255
3.170,289
179,896
208,477
0,701
0,817
Tabella 5.23 Dati relativi alla pianificazione del reparto F9
106
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 9
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.20.49
-4,622
-10,976
-15,598
-€ 19,00
-€ 19,00
94,095
17,289
Variazioni
-2,97%
-3,90%
-15,78%
-8,29%
-2,91%
-1,34%
3,06%
9,04%
Tabella 5.24 Differenze tra soluzione ottimizzata ed attuale per il reparto F9
La soluzione proposta dalla simulazione migliora la soluzione attuale, mediante
una diminuzione congiunta della distanza a vuoto e della distanza di raccolta. In
particolare
la
diminuzione
della
distanza
di
raccolta
è
ottenuta
fondamentalmente mediante l’individuazione di un tragitto più vantaggioso per
spostarsi tra le due località del reparto.
200
180
160
140
120
119
114
100
80
60
40
69
58
20
0
Soluzione
Attuale Soluzione Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.9 Differenze tra distanze ottimizzate e distanze attuali per il reparto F9
107
Capitolo 5 – Sperimentazione dell’algoritmo
V
&
V
&
V
&
&
V
V
&
V&
&
V
&
V
V &
&
VV &
&
V
&
V
&
V V&
&
V
&
V
V&
&
V
&
V&
&
V&
&
V
&
V
V
V
&
V
V
&
V &
V
V &
&
V&
&
V&
V&
V
V&
V&
V&
V &
V&
V
V&
&
V&
V&
V V&
V
&
V&
&
V
&
V
&
V
&
V
&
V
&
V&
V
V&
V&
&
V
V&
V&
&
V&
&
V
V
&
V&
&
V&
V
V&
V
V&
&
V&
N
W
E
S
MEA
&
V
V
&
Legenda
V
&
V
V &
&&
V
V
&
V
V &
&
V
&
V&
&
VV
V&
&
V&
V
V&
&
V&
&
V
V
&
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
P7
43
101
196
68
75
57
83
11 2
145
70
P472
65
58
71
VV
&
&&
V
V&
&
V
V&
&
VV&
V
V&
V&
&
V
&
0
2000
4000 Meters
Figura 5.19 Soluzione attuale per il reparto Forese 9
V
&
V
&
V
&
&
V
&
V
V&
&
V
V
&
V &
&
VV &
&
V
&
V
&
V V&
&
V
&
V
V&
&
V
&
V&
&
V
&
V
&
V
&
V&
V
VV &
&
V
&
V &
&
V&
&
V&
V&
V
VV
V&
V&
V &
V&
V
V&
&
V&
V&
V V&
V
&
V&
&
V
&
V
&
V
&
V
V
&
V&
V
&
V&
V&
&
V
V&
V&
&
V&
&
V
V
&
V&
&
V
&
V
&
V &
V
V&
&
V
N
W
E
S
MEA
&
V
V
&
Legenda
V
&
V
V &
&&
V
V
&
V
V &
&
V
&
V&
&
VV
V&
&
V&
V
V&
&
V&
&
V
V
&
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
P743
101
196
68
75
57
83
11 2
14 5
70
P742
65
58
71
VV
&
&&
V
V&
&
V
V&
&
VV&
V
V&
V&
&
V
&
0
2000
4000 Meters
Figura 5.20 Soluzione ottimizzata per il reparto Forese 9
108
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.10 Ottimizzazione del reparto Forese 10
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
43
120
1
Reparto Forese 10
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì lunedì e giovedì
43
43
86
120
120
240
20.388
15.291
35.679
2
2
4
4.50.06
4.50.06
9.40.12
44,02
44,020
88,040
21,302
21,302
42,604
65,322
65,322
130,644
€ 330,00 € 330,00
€ 660,00
€ 271,00 € 271,00
€ 542,00
€ 601,00 € 601,00
€ 1.202,00
4.216,753 3.162,565
3.689,659
312,115 234,087
273,101
0,927
0,695
0,811
Reparto Forese 10
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Ottimizzazione A2
Viaggio 1 Viaggio 2
Soluzione
lunedì
giovedì lunedì e giovedì
43
43
86
120
120
240
20.388
15.291
35.679
2
2
4
0
0
0
2.28.25
2.26.35
4.55.00
0.23.35
0.22.43
0.46.18
2.00.00
2.00.00
4.00.00
4.52.00
4.49.18
9.41.18
45,800
44,044
89,844
21,170
20,300
41,470
66,970
64,344
131,314
€ 330,00 € 330,00
€ 660,00
€ 273,00 € 270,00
€ 543,00
€ 603,00 € 600,00
€ 1.203,00
4.189,315 3.171,310
3.682,677
304,435 237,645
271,708
0,927
0,695
0,811
Tabella 5.25 Dati relativi alla pianificazione del reparto F10
109
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 10
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.01.06
1,804
-1,134
0,670
€ 1,00
€ 1,00
-6,982
-1,393
Variazioni
0,19%
2,05%
-2,66%
0,51%
0,18%
0,08%
-0,19%
-0,51%
Tabella 5.26 Differenze tra soluzione ottimizzata ed attuale per il reparto F10
La soluzione proposta dalla simulazione è pressoché identica a quell’attuale sia
in termini di componente a vuoto sia in termini di componente di raccolta. Ciò
dipende dalle caratteristiche stesse del reparto in esame: una volta assegnati i
cassonetti che devono essere raccolti, i tragitti possibili per collegare i cassonetti
tra loro e con il deposito o la discarica sono praticamente obbligati.
140
120
100
80
88
90
42
41
60
40
20
0
Soluzione
Attuale
Dist. Raccolta (km)
Soluzione
Proposta
Dist. Vuoto (km)
Grafico 5.10 Differenze tra distanze ottimizzate e distanze attuali per il reparto F10
110
Capitolo 5 – Sperimentazione dell’algoritmo
N
DEPOSITO
#
b
W
V
&
&&
V
V
V&
&
V
V
V&
&
E
S
V&
&
V
&
V
V
&
Legenda
L
EL
D
V
&
V&
&
V
V
&
V
&
V
V
&
V&
&
V&
&
&
V
V
&
V&
V&
V&
VV
V
&
V&
&
V&
V&
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V &
V
&
V
V&
&
V&
&
V
V
&
V&
&
V
&
V
&
V
V&
V&
VV
V&
V&
&
V
&
V&
&
VV&
&
V
V&
&
0
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
3000
6000 Meters
Figura 5.21 Soluzione attuale per il reparto F10
N
DEPOSITO
#
b
W
V
&
&&
V
V
V&
&
V&
V
V&
E
S
V&
&
V
&
V
V
&
Legenda
L
EL
D
V
&
V&
&
V
V
&
V
&
V
V
&
V&
&
V&
&
&
V
V
&
V&
V&
&
V&
VV
V
&
V&
&
V&
V
&
V
V
&
V
&
V
&
V &
&
V
&
V
&
V
&
V
&
V
&
V
&
V
V
&
V &
V
&
V
&
V
&
V&
&
VV
&
V&
&
V
&
V
&
V
&
V&
V
VV
V&
V&
&
V
&
V&
&
VV&
&
V
V&
&
0
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
3000
6000 Meters
Figura 5.22 Soluzione ottimizzata per il reparto Forese 10
111
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.11 Ottimizzazione del reparto Forese 12
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
Reparto Forese F12
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Reparto Forese F12
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
70
132
1
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
mercoledì sabato mercoledì e sabato
70
70
140
132
132
264
20.396
15.297
35.693
2
2
4
6.17.44
6.17.44
12.35.28
70,156
70,156
140,312
50,21
50,210
100,420
120,366 120,366
240,732
€ 363,00 € 363,00
€ 726,00
€ 355,00 € 355,00
€ 710,00
€ 718,00 € 718,00
€ 1.436,00
3.239,746 2.429,809
2.834,778
169,450 127,087
148,269
0,927
0,695
0,811
Viaggio 1
mercoledì
70
132
20.396
2
0
2.54.06
0.52.36
2.12.00
5.58.42
65,834
45,076
110,910
€ 363,00
€ 335,00
€ 698,00
3411,653
183,897
0,927
Ottimizzazione A2
Viaggio 2
Soluzione
sabato mercoledì e sabato
70
140
132
264
15.297
35.693
2
4
0
0
2.53.32
5.47.38
0.55.39
1.48.15
2.12.00
4.24.00
6.01.11
11.59.53
65,341
131,175
47,596
92,672
112,937
223,847
€ 363,00
€ 726,00
€ 337,00
€ 672,00
€ 700,00
€ 1.398,00
2.541,147
2.974,899
135,447
159,453
0,695
0,811
Tabella 5.27 Dati relativi alla pianificazione del reparto F12
112
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese F12
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.35.35
-9,137
-7,748
-16,885
-€ 38,00
-€ 38,00
140,121
11,184
Variazioni
-4,71%
-6,51%
-7,72%
-7,01%
-5,35%
-2,65%
4,94%
7,54%
Tabella 5.28 Differenze tra soluzione ottimizzata ed attuale per il reparto F12
La soluzione proposta dalla simulazione migliora quell’attuale in termini di
distanza totale, mediante una riduzione congiunta della distanza a vuoto e della
distanza di raccolta. E’ da notare che la soluzione ottimizzata mantiene
praticamente lo stesso ordine di visita dei cassonetti della soluzione attuale: il
miglioramento è imputabile esclusivamente all’individuazione di tragitti più
convenienti per collegare i cassonetti tra loro e con il deposito o la discarica.
250
200
140
131
150
100
50
100
92
0
Soluzione
Attuale
Dist. Raccolta (km)
Soluzione
Proposta
Dist. Vuoto (km)
Grafico 5.11 Differenze tra distanze ottimizzate e distanze attuali per il reparto F12
113
Capitolo 5 – Sperimentazione dell’algoritmo
&
V
N
&
V
V
&
V
&
V
&
V
&
V
&
V
V&
&
V&
&
V
&
V
V
V&
&
V&
V
&
V
&
V&
&
V
&
V
&
V
&
V
V
&
V&
&
V
V
&
V&
&
V
&
V
&
V
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V&
&
V
&
V
&
V
&
V&
V
&
V
&
V&
V
&
V
&
V&
&
V
V
V&
V&
V
V&
&
V&
V
V&
&&
V
W
E
S
&
V
V
&
V
&
&
VV
V
&
V&
&
V
&
V
&
V&
&
V&
V
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
&
V
V
&
V
&
V
&
V&
&
V
&
V
V
&
V
&
V
&
V
V
V&
&
V &
&
V
&
V
&
0
5000
10000 Meters
Figura 5.23 Soluzione attuale per il reparto Forese 12
&
V
N
&
V
V
&
V
&
V
&
V
&
V
&
V
V&
&
V &
&
V
&
V
V
V&
&
V&
V
&
V
&
V&
&
&
V
V
&
V
&
V
V
&
V&
V
&
V
&
V&
&
V
&
V
&
V
&
V
V
&
V
&
V
&
V&
&
V
&
V
&
V
&
V
&
V&
V
&
V
&
V
V&
V
&
V
V&
V&
&
V
&
V&
&
V
V&
V&
V&
V
V&
&
V&
V
V&
&&
V
W
E
S
&
V
V
&
V
&
&
VV
V
&
V&
&
V
&
V
&
V&
&
V&
V
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
V
&
&
V
V
&
V
&
V&
&
V
&
V
V
&
V
&
V
&
V
V
V&
&
V &
&
V
&
V
&
0
5000
10000 Meters
Figura 5.24 Soluzione ottimizzata per il reparto Forese 12
114
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.12 Ottimizzazione del reparto Forese 13
Dati Specifici
Numero Punti Raccolta
Numero Cassonetti
Numero Veicoli
65
117
1
Reparto Forese 13
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
Viaggio 1 Viaggio 2
Soluzione
martedì
venerdì martedì e venerdì
65
65
130
117
117
234
20.008
15.006
35.014
2
2
4
6.06.49
6.06.49
12.13.38
71,022
71,022
142,044
60,583
60,583
121,166
131,605 131,605
263,210
€ 322,00 € 322,00
€ 644,00
€ 343,00 € 343,00
€ 686,00
€ 665,00 € 665,00
€ 1.330,00
3.272,698 2.454,523
2.863,610
152,031 114,023
133,027
0,909
0,682
0,796
Reparto Forese 13
Viaggio
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Ottimizzazione A1
Viaggio 1 Viaggio 2
Soluzione
martedì
venerdì martedì e venerdì
65
65
130
117
117
234
20.008
15.006
35.014
2
2
4
0
0
0
2.46.00
2.36.53
5.22.53
1.13.01
1.40.21
2.53.22
1.57.00
1.57.00
3.54.00
5.56.01
6.14.14
12.10.15
64,276
54,654
118,930
63,523
91,119
154,642
127,799 145,773
273,572
€ 322,00 € 322,00
€ 644,00
€ 332,00 € 351,00
€ 683,00
€ 654,00 € 673,00
€ 1.327,00
3371,977 2.405,879
2.876,878
156,558 102,941
127,988
0,909
0,682
0,796
Tabella 5.29 Dati relativi alla pianificazione del reparto F12
115
Capitolo 5 – Sperimentazione dell’algoritmo
Le differenze tra soluzione ottimizzata e soluzione attuale sono riassunte nella
seguente tabella.
Reparto Forese 13
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.03.23
-23,114
33,476
10,362
-€ 3,00
-€ 3,00
13,267
-5,039
Variazioni
-0,46%
-16,27%
27,63%
3,94%
-0,44%
-0,23%
0,46%
-3,79%
Tabella 5.30 Differenze tra soluzione ottimizzata ed attuale per il reparto F13
La soluzione ottimizzata propone un percorso di servizio complessivo più lungo,
ma più veloce, rispetto a quello attuale. Il miglioramento è comunque debole,
poiché la diminuzione della componente a vuoto è fittizia, nel senso che si traduce in un aumento della componente di raccolta. Questo reparto si distingue da
tutti gli altri per il fatto che non serve un gruppo di cassonetti omogeneamente
distribuiti sul territorio e corrispondenti a determinate località, ma serve due
zone molto lontane tra loro, poiché serve in pratica per svuotare i cassonetti che
non so-no stati serviti dai percorsi precedenti. Questo raggruppamento è molto
lontano dalla logica di clustering dell’algoritmo, che si basa essenzialmente sulla
distanza dei punti di raccolta rispetto a deposito e discarica e sul bilanciamento
dei percorsi. Infatti nella simulazione finale, che prescinde dall’attuale cluster, i
cassonetti ora del reparto F13, sono distribuiti tra tutti i viaggi proposti.
300
250
200
119
142
150
100
50
154
121
0
Soluzione
Attuale
Soluzione
Proposta
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.12 Differenze tra distanze ottimizzate ed attuali per il reparto Forese 13
116
Capitolo 5 – Sperimentazione dell’algoritmo
ICCIOLI
GU
V V
&
&&
V
&
V
V
&
V
&
V
&
V
&
DEPOSITO
b
N
#
V
&
&
V
V
&
V
&
&&
V
V
V&
&
V
V
&
V
&
V
&
V
&
V
V &
&
W
I
E
T
S R
D U
I
LE N
L
E
D
E
N A
MOT
I
I O
I
T L
P A
U O
E R
S
RO MEA
10
1
7P
4 3
6
8
69
1
57
1 21
75
83
70
1 45
65
7P
4 2 8
5
1
7
V
&&
V
V&
&
V
V
&
V
&
V&
&
V
&
V
&
V
V
&
V
&
V
&
V
&
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
&
V
V
&
V&
&
V
V
V&
&
V&
&
V
V
&
V
&
V
&
V
&
V
&
&
V
V
&
V
&
V&
&
V&
V&
V&
V&
V
&
V
&
V&
V
&
V
V
&
V
&
V
&
0
9000
18000 Meters
Figura 5.25 Soluzione attuale per il reparto Forese 13
ICCIOLI
GU
V V
&
&&
V
&
V
V
&
V
&
V
&
V
&
&&
V
V
V&
&
V
V
&
V
&
V
&
V
&
DEPOSITO
b
N
#
V
&
&
V
V
&
V
&
V
V &
&
W
IE
S TR
D U
LE IN
L
E
D
E
T A
MO N
I
T L
I
I O
P A
UO
E R
S
RO MEA
01
1
7P
43
8
6
69
1
57
1 21
75
38
1 54
07
56
7P
4 28
1 5
7
V
&&
V
V&
&
V
V
&
V
&
V&
&
V
&
V
&
V
V
&
V
&
V
&
V
&
Legenda
Strade Ravenna
Contenitori
V 1° carico
&
V 2° carico
&
V
&
V
&
&
V
V&
&
V
V
V&
&
V&
&
V
V
&
V
&
V
&
V
&
V
&
&
V
V
&
V
&
V&
&
V&
V&
V&
V&
V
&
V
&
V&
V
V
V&
&
V
V&
&
0
9000
18000 Meters
Figura 5.26 Soluzione ottimizzata per il reparto Forese 13
117
Capitolo 5 – Sperimentazione dell’algoritmo
5.5.14 Resoconto delle simulazioni
La serie di ottimizzazioni effettuate permette di migliorare l’attuale soluzione organizzativa di tutti i reparti, riducendo le distanze ed i tempi totali, ad eccezione
del reparto Forese13, per il quale è proposto un percorso di servizio più lungo in
termini di chilometri, ma più veloce da percorrere rispetto a quello attuale.
Differenze
F1
F2
F3
F4
F5
F6
F7
F8
F9
F10
F12
F13
Totali
Variazioni
F1
F2
F3
F4
F5
F6
F7
F8
F9
F10
F12
F13
Totali
Distanza Distanza Distanza
Vuoto Raccolta Totale
(km)
(km)
(km)
-71,683
44,064
-27,619
-22,281
18,259
-4,022
10,284
-11,938
-1,654
-19,068
17,506
-1,562
-13,203
-0,403
-13,606
-24,842
-9,51
-34,352
-12,07
5,411
-6,659
-5,875
-5,906
-11,781
-4,622
-10,976 -15,598
1,804
-1,134
0,67
-9,137
-7,748
-16,885
-23,114
33,476
10,362
-193,807 71,101 -122,706
Tempo
Totale
(h.m.s)
-0.28.43
-0.02.45
-0.05.06
-0.04.09
-0.16.53
-0.35.48
-0.27.55
-0.22.14
-0.20.49
0.01.06
-0.35.35
-0.03.23
-3.22.14
Distanza Distanza Distanza Tempo
Vuoto Raccolta Totale
Totale
-29,86% 37,68% -7,74% -3,44%
-28,82% 12,55% -1,81% -0,40%
7,43%
-13,18% -0,72% -0,71%
-8,43%
17,14% -0,48% -0,54%
-6,57%
-0,38% -4,44% -2,19%
-11,15% -10,89% -11,08% -4,74%
-8,47%
8,92%
-3,28% -4,04%
-4,60%
-6,72% -5,46% -3,23%
-3,90% -15,78% -8,29% -2,97%
2,05%
-2,66%
0,51%
-0,19%
-6,51%
-7,72% -7,01% -4,71%
-16,27% 27,63%
3,94%
-0,46%
-10,39%
6,29%
-4,10% -2,33%
Costo
Totale
-€ 30,00
-€ 1,00
-€ 5,00
-€ 4,00
-€ 18,00
-€ 37,00
-€ 26,00
-€ 19,00
-€ 19,00
€ 1,00
-€ 38,00
-€ 3,00
-€ 201,00
Costo
Totale
-2,08%
-0,08%
-0,36%
-0,31%
-1,37%
-2,90%
-2,01%
-1,50%
-1,34%
-0,08%
-2,65%
-0,23%
-1,26%
Tabelle 5.31 Resoconto delle differenze tra soluzioni ottimizzate ed attuali
Per quanto riguarda le lunghezze dei percorsi, il miglioramento si attesta
complessivamente intorno al 4%, corrispondente ad una diminuzione di circa
120 km. Relativamente alle durate dei percorsi, il miglioramento si attesta
complessivamente intorno al 2,3%, corrispondente ad una diminuzione di oltre 3
118
Capitolo 5 – Sperimentazione dell’algoritmo
ore; a ciò corrisponde un risparmio complessivo sui costi dei servizio di circa
200 € a settimana, pari al 1,2%. Il grado di miglioramento varia sensibilmente a
seconda dei reparti, come illustrato nel seguente grafico.
-12%
-10%
-8%
-6%
-4%
-2%
0%
2%
4%
6%
F6
F9
F1
F12
F8
F5
Distanza Totale
Costo Totale
Var. Media Tempi
F7
F2
F3
F4
F10 F13
Tempo Totale
Var. Media Distanza
Var. Media Costi
Grafico 5.13 Risultati complessivi di ottimizzazione
I risultati migliori, in termini di minimizzazione dei tempi e delle distanze totali,
si sono ottenuti con la riduzione congiunta delle distanza a vuoto e di raccolta o
con la riduzione della sola distanza a vuoto per quei reparti in cui essa è
preponderante. Gli strumenti che hanno portato al miglioramento sono:
l’individuazione di percorsi più convenienti, una diversa distribuzione dei
cassonetti tra primo e secondo carico; l’avvicinamento dei punti di inizio e fine
carico al deposito o alla discarica; un diverso percorso tra primo e secondo
carico, che considera i diversi livelli di domanda del servizio nel corso della
settimana.
119
Capitolo 5 – Sperimentazione dell’algoritmo
In particolare, si possono evidenziare tre situazioni:
•
Situazioni in cui il miglioramento è ottenuto mediante una riduzione
congiunta della componente a vuoto e della componente di raccolta.
o
Per i reparti Forese 6, Forese 9 e Forese 12 la soluzione ottimizzata
mantiene fondamentalmente la stessa suddivisione dei cassonetti tra
primo e secondo carico della soluzione attuale: i miglioramenti sono
imputabili all’individuazione di tragitti più convenienti e alla scelta di
una diversa sequenza di visita dei cassonetti.
o
Per il reparto Forese 8, il miglioramento è ottenuto grazie anche ad una
nuova ripartizione dei cassonetti tra i due carichi.
o
Per il reparto Forese 5, il miglioramento è riconducibile quasi
esclusivamente alla diminuzione della componente a vuoto, ottenuta
mediante un diverso raggruppamento dei cassonetti tra primo e secondo
carico, che ha un effetto significativo nel complessivo, poiché per
questo reparto la distanza a vuoto incide di circa il 65% sulla distanza
totale, mentre la componente di raccolta è pressoché uguale a quella
attuale.
•
Situazioni in cui il miglioramento è ottenuto con una riduzione della
componente a vuoto.
o
Per i reparti Forese 1 e Forese 7 la diminuzione della componente a
vuoto è ottenuta mediante un nuovo raggruppamento dei cassonetti tra
primo e secondo carico e l’avvicinamento dei punti di inizio e fine
carico alla discarica; questa diminuzione comporta un aumento della
componente di raccolta, ma complessivamente la soluzione risulta
migliore di quella attuale, poiché per questi reparti la componente a
vuoto è preponderante.
o
Per i reparti Forese 2 e Forese 4, la diminuzione della componente a
vuoto è ottenuta spostando i punti di inizio e fine carico e lasciando di
fatto invariate la suddivisione dei cassonetti tra i due carichi e la
sequenza di visita; di conseguenza tale diminuzione si traduce direttamente in un aumento della componente di raccolta e quindi la soluzione
ottimizzata è praticamente identica a quella attuale in termini totali.
o
Per il reparto Forese 13, la riduzione della componente a vuoto non è
completamente fittizia, nel senso che non si traduce direttamente in un
aumento della componente di raccolta, poiché è ottenuta anche tramite
l’individuazione di tragitti più convenienti; per cui la soluzione
120
Capitolo 5 – Sperimentazione dell’algoritmo
ottimizzata riesce a migliorare quella attuale in termini di tempi totali,
proponendo un percorso di servizio più lungo in termini di lunghezze,
ma più breve in termini di tempo.
•
Situazioni in cui il miglioramento è ottenuto mediante una riduzione della
componente di raccolta.
o
Per il reparto Forese 3, la diminuzione della componente di raccolta è
fittizia, nel senso che è ottenuta esclusivamente allontanando i punti di
inizio e fine carico rispetto alla discarica e lasciando praticamente
invariate la suddivisione dei cassonetti tra i due carichi e la sequenza di
visita dei cassonetti; infatti questa diminuzione si traduce direttamente
in un aumento della componente a vuoto e quindi la soluzione
ottimizzata è molto simile a quella attuale per distanze e tempi totali.
o
Per il reparto Forese 10, la soluzione proposta dalla simulazione è
pressoché identica a quella attuale per tempi e distanze, struttura dei
due carichi e sequenza di visita dei cassonetti; ciò dipende dalle
caratteristiche stesse del reparto: una volta assegnati i cassonetti che
devono essere raccolti, i tragitti possibili per collegare i cassonetti tra
loro e con il deposito o la discarica sono praticamente obbligati.
Il risultato delle simulazioni si può, quindi, considerare soddisfacente, poiché le
soluzioni proposte migliorano o al più sono molto prossime a quelle attuali.
Pur avendo verificato la correttezza della rete di archi utilizzata come modello,
le soluzioni proposte dalla simulazione andrebbero realizzate per verificarne la
piena fattibilità e la tempistica precisa. E’ da notare che in questa prima fase
della sperimentazione, le potenzialità pianificative dell’algoritmo sono
comunque state ridotte, poiché si è vincolato l’algoritmo all’attuale
organizzazione, che si basa sulla suddivisione del territorio in reparti,
corrispondenti alle località del territorio, mentre la logica pianificativa
dell’algoritmo si basa essenzialmente sulla posizione dei punti raccolta rispetto
al deposito e alla discarica e sul bilanciamento dei percorsi. Per tener conto di
ciò, sono state eseguite anche delle simulazioni che prescindono dall’attuale
clustering dei cassonetti, come illustrato nei paragrafi successivi.
In ogni modo, questa prima fase della sperimentazione ha portato ad una
maggiore conoscenza del territorio oggetto di pianificazione, alla luce della
quale è possibile condurre delle simulazioni più specifiche, relative a singoli
reparti di raccolta.
121
Capitolo 5 – Sperimentazione dell’algoritmo
5.6 Simulazione del reparto Forese 1 con discarica di Savio
Il reparto Forese1 serve una zona a sud-est del territorio, prossima ad una
discarica sita in località Savio, attualmente non utilizzata, ma il cui ripristino
Hera sta valutando.
#
b DISCARICA
RAVENNA
N
W
b
DEPOSITO
#
S TR
D U
IE N
S
IE
T A
M O N
I
L
LE
D
E
T L
I O
I
PA
U O
E R
A
RO ME
01
96 1
1
8
6
57
Legenda
74 3
P
83
1 21
75
56
1 54
07
8
74 52
1P
7
&
V
&
V
&
V
&
V
&
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
Strade Ravenna
Strade Cervia
Contenitori
&
V Forese 1
&
V
V&
&
V b
&
V
#
0
10000
20000 Meters
&
V
&
V
&
V
V
&
V&
&
V
&
V
&
V
&
&
V
V
V
&
V&
&
V
V&
V
&
V&
&
V
V
&
V&
V&
&
V
V&
&
V
V
[DISCARICA
SAVIO]
Figura 5.27 Posizione del reparto Forese 1 rispetto a deposito e discariche
Si è quindi simulato l’attuale percorso di raccolta lasciando invariato l’ordine di
raccolta dei cassonetti, ma supponendo che la discarica utilizzata dal veicolo non
fosse quella di Ravenna, ma quella di Savio: le tabelle 6.31 e 6.32 sintetizzano i
risultati ottenuti. Per evidenziare le differenze tra le due soluzioni, sono stati
valutati, anche per la soluzione attuale, il tempo a vuoto e quello di raccolta,
assumendo una velocità media di 30km/h per il percorso a vuoto e di 53 km/h
per il percorso di raccolta, su indicazioni del personale di HERA. I risultati mostrano che la soluzione simulata migliora notevolmente quella attuale, grazie ad
una significativa riduzione della componente a vuoto. Il risultato positivo della
prova deriva dalle peculiarità stesse del reparto Forese 1: i cassonetti sono
posizionati in modo che la raccolta avvenga solo nella zona vicina alla discarica
di Savio e lungo il tragitto di spostamento dal deposito alla zona di servizio e
non nel viaggio di ritorno. E’ da notare che, con lo strumento dell’algoritmo di
simulazione così come è strutturato, non è possibile valutare a pieno l’eventuale
vantaggio derivante dall’utilizzo di una nuova discarica, poiché tale vantaggio
deriverebbe dall’utilizzo congiunto delle due discariche, mentre nella simulazio-
122
Capitolo 5 – Sperimentazione dell’algoritmo
ne è possibile associare ad ogni veicolo una sola discarica. Il veicolo, infatti, nel
far rientro dalla discarica di Savio al deposito, che è vicino alla discarica di
Ravenna, non serve nessuno dei cassonetti che incontra.
Reparto Forese 1
Giorno Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Soluzione con
Soluzione con
Discarica Ravenna Discarica Savio
lunedì e giovedì
lunedì e giovedì
108
108
236
236
36.036
36.036
4
4
7.46.04
5.56.28
2.11.32
2.10.50
3.56.00
3.56.00
13.53.36
12.03.18
240,084
130,904
116,94
116,29
357,024
247,194
€ 650,00
€ 650,00
€ 792,00
€ 676,00
€ 1.442,00
€ 1.326,00
2.593,762
2.989,299
100,934
145,780
0,819
Tabella 5.32 Dati relativi alla pianificazione del reparto F1 con discarica di Savio
Reparto Forese 1
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
1.49.36
0.00.42
0.00.00
1.50.18
-109,18
-0,65
-109,83
€ 0,00
-€ 116,00
-€ 116,00
395,537
44,846
Variazioni
-23,52%
-0,53%
0,00%
-13,23%
-45,48%
-0,56%
-30,76%
0,00%
-14,65%
-8,04%
13,23%
30,76%
Tabella 5.33 Differenze tra soluzione con discarica di Savio ed attuale
E’ da notare, inoltre, che questa situazione è stata simulata anche permettendo
all’algoritmo di variare l’attuale sequenza di visita dei cassonetti: i risultati della
simulazione sono pressoché identici a quelli ottenuti imponendo la sequenza di
123
Capitolo 5 – Sperimentazione dell’algoritmo
visita: questo dimostra come la criticità del reparto in esame è legata
fondamentalmente alla posizione della zona di interesse rispetto alla discarica.
5.7 Sperimentazione per i reparti Forese 7 e Forese 8
In questa fase della sperimentazione si sono simulati insieme due gruppi di
cassonetti, appartenenti attualmente a due reparti di raccolta diversi, lasciando
all’algoritmo la scelta dei cluster. Per questa sperimentazione si sono scelti i
reparti Forese 7 e Forese 8, che interessano zone vicine tra loro. Le tabelle
seguenti riportano i risultati relativi alle soluzioni dell’intera settimana di
servizio.
Reparti F7 e F8
Numero Viaggi
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Soluzione Attuale
4
276
464
71.652
8
23.00.34
270,26
148,56
418,82
€ 1.276,00
€ 1.288,00
€ 2.564,00
3.114,026
171,081
0,814
Soluzione Ottimizzata B1
4
276
464
71.652
8
0
11.38.48
2.47.36
7.44.00
22.10.24
257,813
141,591
399,404
€ 1.276,00
€ 1.235,00
€ 2.511,00
3.231,449
179,397
0,814
Tabella 5.34 Dati relativi alla pianificazione dei reparti F7 e F8
Reparti F7 e F8
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Differenze
0.50.10
-12,447
-6,969
-19,416
€ 0,00
-€ 53,00
-€ 53,00
117,424
8,317
Variazioni
-3,63%
-4,61%
-4,69%
-4,64%
0,00%
-4,11%
-2,07%
3,77%
4,86%
Tabella 5.35 Differenze tra soluzione ottimizzata e soluzione attuale
124
Capitolo 5 – Sperimentazione dell’algoritmo
La soluzione proposta dall’algoritmo migliora quella attuale, riducendo sia la
distanza a vuoto che la distanza di raccolta, e permettendo un risparmio di tempo
di circa un’ora. Nella soluzione proposta i cassonetti sono suddivisi in due
gruppi ed ogni gruppo è servito da due viaggi settimanali, che prevedono
ciascuno due passaggi in discarica, come nella soluzione attuale. Il
miglioramento proposto è ottenuto mediante un diverso raggruppamento dei
cassonetti, basato sulla distanza dei cassonetti dal deposito e dalla discarica e sul
bilanciamento delle lunghezze percorse dai due viaggi. Più precisamente, dei
due viaggi proposti dall’algoritmo, uno serve i cassonetti mediamente lontani
dalla zona in cui si trovano il deposito e la discarica e l’altro serve i cassonetti
più lontani e quelli più vicini al deposito e alla discarica. Nell’attuale
organizzazione, invece, un viaggio serve i cassonetti più vicini al deposito e
l’altro i cassonetti mediamente e più lontani dal deposito. Questo diverso
raggruppamento dei cassonetti è illustrato nella figura 6.28.
Inoltre, mentre la soluzione attuale propone percorsi identici per i due viaggi
effettuati nell’arco della settimana, la soluzione ottimizzata propone percorsi
diversi che tengono conto del diverso livello di carico nei due giorni di servizio.
N
Strade Ravenna
Contenitori
V Forese 7 e 8
&
Cluster attuale
Cluster proposto
1° viaggio
2° viaggio
2°viaggio
W
E
S
V
V&
&
V
&
&
V
V
&
V&
&
V
&
V&
V
&
V
&
V
&
V
V
&
V
V
&
V
&
V&
&
V
&
V
&
V
&
V
&
V
&
V
&
V
V
&
V&
&
V
&
V
&
V
&
V&
V
&
V&
&
V
V&
V
&
V
&
V
&
V
&
V&
&
V&
V
&
V
V
&
V&
&
V
&
V
&
VV
&
V
&
V
&
V&
V
V
&
V&
&
V&
V&
V&
&
V
V
&
V&
&
V&
V
V
&
V
&
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V&
V
&
V&
&
V
&
V
&
V
&
V
&
V&
V
V
&
V
&
V
&
V
&
V
&
VV
&
V
&
V
&
V
&
V&
V
&
V&
&
V
&
V
&
V
&
V
&
V&
&
V&
V
&
V
V
V
V&
V&
&
V&
&
V
V&
&
V&
&
V
V&
&
V&
V
&
V&
V&
V
&
V
&
V
&
V&
V&
V&
&
V
V
V
&
V
&
&
V
V
&
&
V
V
&
V
&
V
&
V
V&
&
V
&
V
&
V
&
V&
&
V
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V
&
V&
V
&
V&
V
V&
&
V
&
b
DISCARICA
RAVENNA
&&
V
V&
V&
V
V
&
V&
V
&&
V
DEPOSITO
#
#
b
I
E
LE
L
DU
I
N
STR
M ONTI
DE
ATTI
LIO
0
3000
6000 Meters
Figura 5.28 Raggruppamento proposto per i cassonetti dei reparti F7 e F8
125
Capitolo 5 – Sperimentazione dell’algoritmo
Dai risultati ottenuti si può notare che nella simulazione eseguita la portata dei
veicoli non è sfruttata a pieno. Alla luce di ciò si è provato a simulare la stessa
situazione ipotizzando di rilassare il vincolo dei turni da sei ore, per cercare di
sfruttare al massimo le dodici ore lavorative giornaliere. I risultati ottenuti sono
riportati nelle tabelle seguenti.
Reparti F7 e F8
Numero Viaggi
Giorni Raccolta
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Numero Punti Sovraccarichi
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Soluzione Attuale
4
lun., giov., merc., sab.
276
464
71.652
8
23.00.34
270,26
148,56
418,82
€ 1.276,00
€ 1.288,00
€ 2.564,00
3.114,026
171,081
0,814
Soluzione Ottimizzata B1
2
lun., giov.
276
464
71.652
7
0
9.41.16
2.55.41
7.44.00
20.20.57
217,821
148,125
365,946
€ 1.276,00
€ 1.199,00
€ 2.475,00
3.521,127
195,799
0,931
Tabella 5.36 Dati relativi alla pianificazione dei reparti F7 e F8
Reparti F7 e F8
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Differenze
2.39.37
-52,439
-0,435
-52,874
€ 0,00
-€ 89,00
-€ 89,00
407,101
24,718
0,117
Variazioni
-11,56%
-19,40%
-0,29%
-12,62%
0,00%
-6,91%
-3,47%
13,07%
14,45%
14,37%
Tabella 5.37 Differenze tra soluzione ottimizzata ed attuale per i reparti F7 e F8
La soluzione proposta evidenzia come la domanda di servizio della zona
considerata possa essere soddisfatta con un’organizzazione che prevede sette
126
Capitolo 5 – Sperimentazione dell’algoritmo
passaggi in discarica, anziché otto: il passaggio in discarica in più che si ha
nell’organizzazione attuale è imputabile esclusivamente al vincolo temporale dei
turni da sei ore e non al vincolo della capacità del veicolo. La soluzione proposta
permette un miglioramento notevole della distanza e del tempo totali: si ha un
risparmio di più di due ore e mezza, ovvero di un 40% del turno lavorativo.
500
400
300
270
258
217
148
141
148
200
100
0
Soluzione
attuale
Soluzione Soluzione
ottimizzata ottimizzata
6h
12h
Dist. Raccolta (km)
Dist. Vuoto (km)
Grafico 5.14 Differenze tra distanze ottimizzate ed attuale per i reparti F7 e F8
Inoltre è da considerare anche l’ulteriore risparmio derivante da un passaggio in
meno in discarica. Questo costo non era stato considerato nelle simulazioni
precedenti, poiché le soluzioni ottimizzate richiedevano lo stesso numero di
passaggi in discarica delle rispettive soluzioni attuali. Il passaggio in discarica,
ovvero le operazioni di pesatura, svuotamento e pulitura del veicolo, ha un costo
di circa cinque euro, per cui, con una certa approssimazione, nell’arco di un
anno si ha un risparmio di circa 240 €, pari al costo di dieci ore di servizio (un
turno e mezzo) dell’operatore. E’ da notare che il costo del servizio nella
soluzione ottimizzata è piuttosto elevato poiché deve tenere conto delle ore di
lavoro straordinario dell’operatore nei due viaggi. Naturalmente questa
soluzione richiederebbe una riorganizzazione complessiva dei turni lavorativi,
poiché la tempistica dei viaggi proposti non è congruente con la suddivisione del
lavoro in turni di sei ore:per attuare questa soluzione si dovrebbe prevedere un
cambio dell’operatore durante l’esecuzione dei singoli viaggi.
127
Capitolo 5 – Sperimentazione dell’algoritmo
5.8 Sperimentazione per l’intero territorio
Nell’ultima fase della sperimentazione si è simulato il servizio di raccolta di tutti
i cassonetti della zona, prescindendo dall’attuale suddivisione del territorio in
reparti e rilassando il vincolo temporale dei turni da sei ore. Per evidenziare le
differenze ottenute, si sono valutati per la soluzione attuale il tempo a vuoto e
quello di raccolta a partire dai tempi totali disponibili e assumendo, su indicazione del personale di HERA, che il tempo a vuoto incida del 77% sul tempo totale.
Numero Reparti
Numero Viaggi
Numero Veicoli
Numero Punti Serviti
Numero Cassonetti Serviti
Carico Tot. (kg)
Numero Passaggi Discarica
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Svuotamento
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Organizzazione Attuale
12
24
4
1.622
2.844
429.156
48
75.24.10
22.00.06
47.22.00
144.46.16
1.865,024
1.129,902
2.994,926
€ 7.821,00
€ 8.140,00
€ 15.961,00
2.964,399
143,294
0,813
Ottimizzazione B1
6
12
2
1.622
2.844
429.156
41
59.21.29
25.53.42
47.22.00
132.37.11
1.476,655
1.337,081
2.813,736
€ 7.821,00
€ 7.434,00
€ 15.255,00
3.235,989
152,522
0,952
Tabella 5.38 Dati relativi alla pianificazione dell’intero territorio
La soluzione proposta dalla simulazione si differenzia notevolmente da quella
attuale in termini di organizzazione del servizio. In relazione alla modalità di
raggruppamento dei punti di raccolta, nella soluzione simulata i cassonetti sono
raggruppati in base alla distanza relativa dei punti raccolta dalla zona del
deposito e della discarica, anziché in base alle località. Tale cluster è finalizzato
al bilancia-mento delle lunghezze dei percorsi: il servizio di raccolta dei
cassonetti vicino alla discarica o al deposito è distribuito tra tutti i percorsi
all’inizio o alla fine di ogni percorso; in genere ogni viaggio comprende sia
carichi che servono cassonetti molto lontani dal deposito sia carichi che servono
cassonetti molto vicini. In relazione all’organizzazione dei viaggi, l’algoritmo
128
Capitolo 5 – Sperimentazione dell’algoritmo
propone una soluzione in cui ogni viaggio dura circa undici ore e prevede in
media tre passaggi in discarica; ogni viaggio è effettuato da due operatori e
perciò richiede un cambio dell’operatore durante l’esecuzione del viaggio stesso;
l’intero servizio è eseguito con due veicoli anziché quattro. Le principali
differenze tra le soluzioni sono sintetizzate nella tabella e nei grafici seguenti.
Differenze
-6
-12
-2
-7
16.02.41
3.53.36
0.00.00
12.09.05
-388,369
207,179
-181,190
-€ 706,00
-€ 706,00
271,590
9,228
0,139
Numero Reparti
Numero Viaggi
Numero Veicoli
Numero Passaggi Discarica
Tempo Vuoto (h.m.s)
Tempo Raccolta (h.m.s)
Tempo Servizio (h.m.s)
Tempo Tot. (h.m.s)
Distanza Vuoto (km)
Distanza Raccolta (km)
Distanza Totale (km)
Costo Servizio
Costo Totale
Produttività (kg/h)
Produttività (kg/km)
Coeff. Utilizzo Veicolo
Variazioni
-21,28%
17,70%
0,00%
-8,39%
-20,82%
18,34%
-6,05%
-8,67%
-4,42%
9,16%
6,44%
Tabella 5.39 Differenze tra soluzione ottimizzata e soluzione attuale
3.000
2.000
1.865
1.477
Dist. Vuoto (km)
1.000
1.130
1.337
Soluzione
attuale
Soluzione
proposta
Dist. Raccolta (km)
0
Grafico 5.15 Differenze tra distanze ottimizzate e distanze attuali
100
80
22
26
60
40
Tempo Vuoto (h)
75
20
59
Tempo Raccolta (h)
0
Soluzione
attuale
Soluzione
proposta
Grafico 5.16 Differenze tra tempi ottimizzati e tempi attuali
129
Capitolo 5 – Sperimentazione dell’algoritmo
N
\&
\
&
\
&
U
%
%
U
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U
%
U %
%
U
U
%
U
%
U
%
U
%
U
%
\
\&
&
\&
\&
\\&
\&
\&
\&
&
\&
\&
&
\&
\\&
&
\&
\&
\&
\&
\&
\\&
&
\&
\&
\&
\&
\
\&
\&
\&
\&
\&
\&
\&
\
\&&
W
S
b
DISCARICA
RAVENNA
#
\&&
\
\&
&
\
Legenda
U
%
U
%
U
%
\
&
U
%
³#³#
U
%
U
%
U
%
U
%
³#³³#
U
%
³³#
U
%
#
³
#
³
#
\
&
³#³#³#
#³#³³#
³##
U
³# ³#%
³#³#³#%
³#³#
\
\&
&
U$%
U%
³#³#³#³# H
\
&
U
U
x%
UU%
%
b
#
S
#S
#
H
$ {{x{x {%
xU
S
#
³#³#³#³³#
³³{³#
\{xx{x
&
H
$
#
\
&
x
H
$
³#³#
#
S
#
{
S
#
xH
³# {xH
{$
H
$
H
$
x
H
$
$
{
H
$H
x
$ {{{xx{x
{x
x
{
x
{
H
$
H
$
H
$
S
#
H
$
H
$
S
#
H
$
H
${x
#
H
$
S
#
H
$H
#S
#
H
$
S
#S
S
#S
$
$$H
S
#S
H
$
#S
#
#
H
$
S
#S
S
#S
H
$H
S
#
$H
S
#S
$H
#
#
H
$H
S
#
$H
$ H
H
$
$
a%
%
$H
$
a
a
%
a%
a
%
aa%
$H
$H
a%
a
a%
%
a%
a
a
a%
a
%
a%
%
$H
a%
%
$H
a%
a
%
H
$H
a%
%
a
%
a
%
a%
%
a%
a
T
$
H
$
a
%
a
%
T
$
$
a
a%
%
a%
%
a
%
T
$
$H
a
T
$H
T
$
H
$
a#
%
T$
$
a
%
H
$H
T
$
T
$
·
#
·
#
a
%
a
%
T
$
H
$
T
$
·
#
T$
$
T$
·#
·#·#··#
T
·#·#
$
H
$H
$H
T
$
x
·#
{
{x{x {x$
T{x
{x{xx{xx{
T
$
H
$ x{
³"³"
·#
T
·$
#
{
·$
#$
T
T
T
$
T
T$
$
T
$
³"³"³"³"³³"" ³"
]']]']''
T
$
T
$
T
$
³³""³"³" ³"³"³"³" ³"³"³{"{xx
³
"
³
"
³
"
³
"
³
"
[x{x
T
³"³"³"
{x{x{x{x{x{%
T$
$
{x
T
T$
$
]
'
³"³³""³³""³³""³"³"
[%
%
[%
]']'
[%
³"
{x
[
[
%
[%
%
]
'
T
$
[
T
$
T
$
³"
T
[[%
T
$
{x
[%
%
T$
$
T
T$
$
T$
$
T
[
%
T
$
[
%
[
%
[
%
[
%
[
%
[
%
]
'
[
%
[
%
[%
%
³³""³³""³³""
[%
%
[
%
]
'
x
[
%
[
%
{
]
'
]
'
]
'
·
#
[
%
[
%
]
'
·
#
[[%
[{x{x{x{x ]']']']' ]']'
³³""
x
{
³"
{x{{xx{{x{xx{x
³"³"³"
]'
·#
³" %
·# b
]'
[
[
%
]
'
³"³"
]']']]''
[
%
]']' ]']]'']']']']']']]]'']'']']' ·#·#
³"³"³" %
[
[[%
%
·#
]' ]]''
[%
%
·#
#·#
[
··#
·#
·#·#··#
#··#
#
]']']']' ·#·#
·#
#
DEPOSITO
IE
T IA
MO N
S TR
DU
I N
L E
LE
D
I O
I
T L
PA
R O
E U
RO MEA
74 3
10 P
1
1 21
8 75 83
6
75
69
1
07
1 45
65
1P
74 2 8
7 5
DISCARICA
SAVIO
#
#·#·#
··#
·
#
#
·#·#·#·#··#
0
E
3000 6000 9000 12000 15000 Meters
Figura 5.29 Reparti di raccolta attuali
130
Strade Ravenna
Strade Cervia
Contenitori
·# Forese 1
S
# Forese 10
H
$ Forese 12
{x Forese 13
\ Forese 2
&
T Forese 3
$
³" Forese 4
]' Forese 5
[ Forese 6
%
³# Forese 7
U Forese 8
%
a Forese 9
%
Capitolo 5 – Sperimentazione dell’algoritmo
N
$
Z
Z
$
$
Z
Z
Z$
$
Z$
Z$
Z
Z$
Z$
Z$
$
%
C
C
%
Z
$
Z
$
Z
$
Z
$
Z$
$
C
%
Z
C
%
C
%
C
%
C
%
C
%
Z
$
C
%
Z$
$
Z$
$
Z
$
Z
C
%
Z
Z$
Z
Z$
$
Z$
Z
$
C
%
%
C
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
C
%
C
%
C%
%
C
%
C
%
Z$
$
Z
C
%
C
%
C
%
C
%
C
%
Z$
$
Z
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
C
%
Z
$
C
%
Z
$
C
%
C
%
C
%
C
%
Z$
$
C
%
C
%
Z
$
C
%
Z
$
Z
C
%
C
%
Z$
$
C
%
Z$
Z$
C
%
Z$
C
%
Z
$
Z³#
C
%
C
%
C
%
C
%
Z$
$
C
%
Z
$
Z$
Z
$
Z
Z$
$
Z
Z$
Z
C
%
³# $
C
%
C
%
C
%
Z
C%
%
Z$
$
Z
C
C
%
³
#
Z$
$
C
%
C
%
C
%
³
#
³C
# %
Z$
C%
%
C
³%
#
³
#
C
%
³
#
C
³³##
C
C
%
Z
$
C
%
C
%
C
%
³
#
C%
%
³#$
³#
Z
³#
³#
#
#
Z
$
Z
³#
³³#
³#³#³#
Z
$
Z$
$
Z
Z$
$
C
%
³%
#
Z
$
Z$
$
³³#³#
#
Z
$
Z
C
%
Z
$
Z
$
Z
$
Z
$
Z
$
³
³
#
Z
$
C
C
%
Z
$
Z
$
C
%
Z
$
Z
$
³#³# %
C$
Z
Z$
Z
Z$
Z$
Z$
Z$
Z$
Z$
$
Z
Z$
$$
Z
W
S
b
DISCARICA
RAVENNA
E
#
Legenda
Z
$
$
Z
Z
b
$$
Z
Z
$
Z
$
Z
$
#
DEPOSITO
I
E
S TR
DU
IE N
T A
I
MO N
L
LE
D
I
I O
T L
P A
R O
EU
RO MEA
³#³# ³#³#³#³³#
³##
#
\
&
³#³#³³#
³#
#³³#
#³³#
³³#
#
³#
³
#
³#³#³#
\
C
%
³#
³#
\&
C
%
³#
³#
#
³#&
C
%
³³#
C
%
³#
³##
\%
&
C
%
\&
&
³#³³#
\C
&
³#
#
³³##³#³# ³#³³#
#
\
³#
\³#³&
&
³
#
\
\³&
&
\
&
\
&
\#&
\
&
³
#
³
#
\
\&
&
\&
\³#³#
&
\³&
\\&
&
\
&
\
&
\#
\& &
[
%
\&
\
\&
\
&
\
&
\
&
\
&
\&
\\&
&
\
&
\
&
\
&
\&
&
\&
\&
\&
\&
\ &
&
\
&
\&
&
\
&
&
\
\
&
\&
\
\
&
\
&
\
\
\&
&
\
&
\
&
\
&
\
&
\&
\
&
\&
&
\
&
\
\
\
&
\
\&
[&
%
\&
&
\&
\
\&
\&
\&
\&
\&
&
\
\
\&
&
\
&
"
´
´"´´""´"´"´""´"
´´""´´""´" &
\
\
&
´"
"
´
´"
\&
&
\%
\&
[&
%
\
&
´"´"´" ´"
´"
\%
[[%
[%
´´"´"´´""´"´"´" ´" ´"´´"´" ´"
[
[%
"
"
"
"
"
"
[
[%
%
´´"´´"´´""´""" ´"´´´" ´"´"´"´"´"´"´"´´´"
"´´´"´´""´´""
´´ ´"´""´"&
"
´"´
´´"´\"´"´
´"´"´"
[
%
[ b
[%
%
"´ ´" ´"
[
%
"
´
[
%
[%
´"´"´
"
[%
%
[%
[%
[%
[%
%
[ %
[%
%
[%
[%
´"´" ´"´%́
[%
[
[
%
"
[
[%
[
%
[
[
%
[%
[
%
[%
%
["
%́
[
[%
[%
%
[%
´´"
[[
[%
[%
[%
[%
[%
[%
%
[%
[%
[
[
%
[%
%
[%
[%
[ %
[[
%
01 74P 3
1
1 12
8 57 38
6
57
69
1
07
1 45
65
74P
12 8
7 5
DISCARICA
SAVIO
Strade Ravenna
Strade Cervia
Contenitori
Z Reparto N1
$
³# Reparto N2
C Reparto N3
%
\ Reparto N4
&
´" Reparto N5
[ Reparto N6
%
#
[%
[
[%
[%
%
%
[
[
%
[
%
[ %
[%
%
[
0
3000 6000 9000 12000 15000 Meters
Figura 5.30 Reparti di raccolta proposti dalla simulazione
131
Capitolo 5 – Sperimentazione dell’algoritmo
La soluzione proposta presenta, rispetto all’attuale organizzazione, notevoli
vantaggi in termini di minimizzazione di distanze, durate e costi: la lunghezza
totale del percorso di servizio diminuisce di circa il 6%, la durata dell’intero
servizio si riduce di 12 ore nell’arco della settimana ed i costi diminuiscono di
un 4%, corrispondenti ad un risparmio di circa 700€ la settimana.
Inoltre, in relazione ai costi variabili, è da considerare anche il risparmio
derivante dal minor numero di passaggi in discarica: alle operazioni di pesatura,
svuotamento e pulizia dei veicoli in discarica è associato un costo di circa 5 €.
A grandi linee, il risparmio imputabile ai costi variabili è così valutabile:
Risparmi
Costo
Servizio
settimana
Costo
Costi
Passaggi in Discarica Variabili Totali
€ 700,00
€ 35,00
€ 735,00
mese
€ 2.800,00
€ 140,00
€ 2.940,00
anno
€ 33.600,00
€ 1.680,00
€ 35.280,00
Tabella 5.40 Risparmi su costi variabili
E’ da notare, poi, che la riduzione della lunghezza totale del percorso di servizio
si traduce in un risparmio sui costi di ammortamento del veicolo utilizzato,
poiché permette di assegnare al veicolo stesso una vita utile prevista maggiore di
quella gli si assegnerebbe con la soluzione attuale. Infine l’utilizzo di due veicoli
anziché quattro induce ulteriori risparmi.
La soluzione per essere attuata richiede, però, una riorganizzazione dell’intero
sistema organizzativo, che permetta di far coincidere la tempistica con la
suddivi-sione del lavoro degli operatori in turni da sei ore: questo potrebbe
essere realizza-to mediante un sistema che preveda un cambio dell’operatore
durante l’esecuzione dei singoli viaggi. Inoltre la soluzione richiede un
addestramento degli operatori e potrebbe risultare di più difficile attuazione da
parte degli operatori, poiché meno intuitiva e più difficile da memorizzare
rispetto a quella attuale.
132
Conclusioni
Conclusioni
I risultati ottenuti dalle sperimentazioni permettono di affermare che il modello
di pianificazione delineato nel presente studio rappresenta in modo piuttosto
attendibile la realtà in esame. Per ridurre il più possibile il divario,
inevitabilmente presente, tra il modello e la situazione reale da esso
rappresentata, le fasi di codifica delle informazioni e di verifica dei risultati sono
state condotte seguendo le indicazioni fornite dal personale di Hera, in base alla
loro esperienza.
La sperimentazione dell’algoritmo ha condotto a risultati del tutto soddisfacenti,
permettendo di migliorare l’attuale soluzione organizzativa, in termini di
minimizzazione delle distanze e dei tempi totali del servizio, con conseguente
riduzione dei costi complessivi. Il miglioramento, rispetto agli attuali percorsi di
raccolta, è stato ottenuto mediante l’individuazione di tragitti più convenienti, il
clustering dei cassonetti in base alla loro posizione rispetto al deposito e alla
discarica, la costruzione dei viaggi coerente con i diversi livelli di domanda del
servizio, il bilanciamento dei percorsi.
Le soluzioni sono state ricavate in tempi relativamente : tempi dell’ordine di
poche decine di secondi per le simulazioni relative ai singoli reparti di raccolta,
quindi per un numero complessivo di circa 135 punti raccolta; tempi dell’ordine
di pochi minuti per la sperimentazione globale, relativa a circa 1600 punti
raccolta.
L’aderenza del modello alla realtà e la bontà dei risultati dipendono fortemente
dalla quantità e dalla qualità delle informazioni disponibili, in particolare sui
livelli di domanda e sui vincoli stradali, per cui è importante un monitoraggio
continuo del servizio, per approfondire ed aggiornare il quadro conoscitivo.
Naturalmente solo l’implementazione dei percorsi di raccolta proposti
dall’algoritmo permetterebbe di verificare la piena fattibilità e la precisa
tempistica dei viaggi ed, eventualmente, di modificare i parametri del problema,
in modo da indirizzare più opportunamente la ricerca della soluzione
organizzativa.
Le soluzioni ottenute sono solo una parte di tutte quelle che è possibile ottenere
e, quindi, non si può avere la certezza che la soluzione trovata sia la migliore; in
ogni caso, i risultati delle simulazioni permettono una maggiore conoscenza
della realtà in esame, poiché consentono di evidenziarne gli aspetti
133
Conclusioni
particolarmente critici o quelli potenzialmente migliorabili, e, quindi, possono
essere prese come punto di partenza per un’analisi più approfondita del
problema di pianificazione.
Strumenti informatici come quello utilizzato nel presente studio, se sostenuti da
un efficace sistema informativo ed indirizzati da un’opportuna esperienza di
gestione risultano essere un supporto fondamentale per la gestione del servizio di
raccolta dei rifiuti.
134
Bibliografia
Bibliografia
[1] Decreto Legislativo 5 febbraio 1997, n. 22, recante: “Attuazione delle
direttive 91/156/CEE sui rifiuti, 91/689/CEE sui rifiuti pericolosi e
94/62/CE sugli imballaggi e rifiuti di imballaggio”.
[2] Comune di Ravenna Settore Lavori Pubblici, “Regolamento di gestione dei
rifiuti solidi urbani e assimilati”.
[3] Agenzia per la Protezione dell’Ambiente e per i servizi Tecnici,
Osservatorio Nazionale sui Rifiuti, “Rapporto Rifiuti 2004”.
[4] S. Martello, “Lezioni di Ricerca operativa”, Progetto Leonardo, editore
Esculapio, 1995.
[5] R. De Franceschi, “Algoritmi euristici per il Vehicle Routing Problem”,
Università degli studi di Padova, Dic 2003.
[6] G. Clarke and J.W. Wright, “Scheduling of Vehicles from a central depot to
a number of delivery points”, Operation Research 12, 568-581, 1964.
[7] F. Latini, “Algoritmi euristici per la pianificazione della raccolta dei rifiuti
solidi urbani”, pp 109-123, Università degli studi di Bologna, Dic 2002
[8] Mole, R.H. Jameson, S.R., “A sequential route-building algorithm
employing a generalized savings criterion”, Operation Research Quarterly,
27, 503-511, 1976.
[9] N. Christofides, A. Mingozzi, P. Toth, “The Vehicle Routing Problem”, a
cura di N.Christofides, A. Mingozzi, P. Toth ans C. Sandi, Wiley,
Chichester, Combinatorial Optimization, pp315-338,1979.
[10] Gillet, B.E. and Miller, L.R., “A heuristic algorithm for the vehicle dispatch
problem”, Operation Research 22, 340-349, 1974.
135
Bibliografia
[11] Fisher, M.L. and Jaikumar, R., “A generalized assigment heuristic for
vehicle routing”, Networks 11, 109-124, 1981.
[12] Bramel, J.B. and Simchi-Levi, D., “A location based heuristic for general
routing problems”, Operation Research 43, 649-660, 1995.
[13] S. Lin e B.W. Kernighan, “An effective heuristic algorithm for the
travelling salesman problem”, Operation Research 21, 698-516, 1973.
[14] N. Christofides e S. Elion, “An algorithm for the vehicle dispatching
problem”, Operation Research Quarterly 20, 309-318, 1985.
[15] Dueck, G. and Scheurer, T., “Treshold accepting: ageneral purpose
optimisation algorithm”, Journal of Computational Physics, 104, 86-92,
1993.
[16] Dueck G., “New optimisation heuristics: The great deluge algorithm and the
record-to-record travel”, Journal of Computational Physics, 104, 86-92,
1993.
[17] F. Glover e M. Laguna, “Tabu Search”, Kluwer, Boston, 1997.
[18] Rochat, Y. And Taillard, E.D., “Probabilistic diversification and
intensification in local search for vehicle routing”, Journal of Heuristics, 1,
147-167, 1995.
[19] Toth, P. and Vigo, D., “The granular tabu search (and its application to the
vehicle routing problem)”, Working Paper, DEIS, University of Bologna,
1998.
136