Consorzio CETMA
Centro di Progettazione Design & Tecnologie dei Materiali
Fabio De Pascalis
Divisione Ingegneria Informatica
Tel.: 0831- 449500
[email protected]
www.cetma.it
Il CETMA : un modello di cooperazione nel mondo della ricerca privata
Centro di Progettazione Design & Tecnologie dei Materiali
Il CETMA : un modello di cooperazione nel mondo della ricerca privata
Ambiti di ricerca:
• Ingegneria dei materiali e delle
strutture
• Ingegneria Informatica
• Design, Grafica e Comunicazione
Materials and
Structures
Engineering
Department
Information
Technology
Department
Design,graphic
and
Communication
Divisione Ingegneria Informatica
Mission
La mission della divisione Ingegneria Informatica del
consorzio CETMA è quella di promuovere attività di
ricerca industriale applicata, nell’ambito delle Tecnologie
Informatiche e della Comunicazione. Sviluppare sistemi
informatici ed informativi avanzati in contesti applicativi
inerenti la progettazione ingegneristica, sistemi
distribuiti e data processing, la visualizzazione
avanzata.
SIDART (Sistema Integrato per la diagnostica dei beni artistici)
Progetto
SIDART
Sistema Integrato per la Diagnosi dei beni ARTistici
“Tecnologie Informatiche per l’integrazione di dati
diagnostici nell’ambito dei Beni Culturali”
SIDART (Sistema Integrato per la diagnostica dei beni artistici)
Obiettivo
- Obiettivo principale del progetto è quello di creare un
sistema integrato per la diagnostica dei beni culturali
- Metodologie per integrare dati eterogenei provenienti
dai differenti strumenti
- Rendere i dati acquisiti facilmente interpretabili e
fruibili dai restauratori
- approntare interventi di restauro mirati con la
massima efficacia, il minimo costo ed il minimo
rischio per l’integrità dell’opera.
Problematiche
Fisico/Ottico/Elettroniche
Applicativo/Informatiche
Laser e teste
ottiche
SW controllo
gestione e postprocessing
Colorimetria
Rilievo e
georeferenzazione
TECNICHE DI INDAGINE
- IMAGING MULTISPETTRALE
- TERMOGRAFIE
- SCANSIONI LASER 3D
Imaging Multispettrale
La diagnostica per
immagini è il processo di
estrazione di
informazioni da
immagini ottenute come
risposta a diverse bande
dello spettro
elettromagnetico.
ultraviolet
visible
infrared
retouch
varnish
paint layers
ground
canvas/wood
underdrawing
X-ray
Macchina multispettrale: acquisisce foto in differenti range spettrali; infrarosso,
ultravioletto, fluorescenza, falsi colori..
Truchas, Our Lady of the Rosary Church (New Mexico)
Dettagli sotto lo strato pittorico
Near Infrared image
Colour image
B
G
B
G
R
R
False color infrared
NIR
Falsi colori
L’imaging
multispettrale è
efficace anche su
manufatti e opere 3D
visible reflection
visible fluorescence
Rifacimento
dell’opera,
Denota la presenza di
Materiali differenti
SCANNER MULTISPETTRALE
Analisi colorimetrica nel visibile
Max superficie scansionabile 1 –1.5 m^2
Risoluzione spaziale 4x4 pt mm^2
Frequenza di acquisizione 500Hz
Sensibilità spettrale (380 – 800 nm)
Bande spettrali: 32
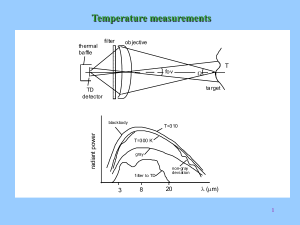
TERMOCAMERA
L’analisi tramite termocamera risponde all’esigenza di caratterizzare lo stato
termico dell’opera stessa o del suo supporto. Accentuati gradienti termici possono
essere causa di degrado accelerato dell’opera. La termovisione quale mezzo di
diagnosi non distruttiva presenta un vasto campo di applicazioni che vanno dal
rilevamento dell’umidità alla scoperta di elementi architettonici nascosti (ad
es. finestre murate), dall’individuazione di distacchi negli intonaci alla
caratterizzazione materica dell’edificio.
SIDART 100
Transmittive optics
Receiving optics
Scanning camera
Target and Reference Signal (10MHz)
1
La risoluzione dipende dalla
frequenza di modulazione, che può
variare da 10 a 1000 MHz.
Reference signal
Target signal
0.8
0.6
Amplitude (A.U.)
La distanza è determinata
misurando la differenza di fase tra la
modulante del segnale di riferimento
e di quello ricevuto.
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
50
100
150
200
250
Time (ns)
IS →Reference Signal
IS0 →Reference Signal Amplitude
IR = IR0 sin(2πν mt)
IR →Target Signal
IR0 →Target Signal Amplitude
t →Present Time
δt →Target Signal Delay Time
where δ t =
νm →Modulation Frequency c→Speed Light
IS = IS 0 sin(2πν m (t + δ t))
2L
and δϕ = ϕs −ϕR = 2πν m ( t + δ t ) − t = 2πν mδ t
c
4πν mL
cδϕ
then δϕ =
and resolution is 2L =
2πν m
c
Reflectivity map
Range map
Emperor Costantine,
Costantine,
IV century A.D.
3D Model
intensità
distanza
3D
1.5 mm ca
Acquisizione a
10 m ca
Caratteristiche distintive rispetto a tecnologie similari attualmente sul mercato:
Il fascio laser è modulato all’infrarosso
e non nel visibile
sistema maggiormente penetrante
Misura la distanza sulla base della
differenza di fase elettrica del segnale
maggiore precisione
Il sistema di generazione del segnale è
separato dalla testa ottica da un fascio di
fibre ottiche
sistema più flessibile
L’ampiezza del segnale di ritorno
fornisce l’intensità in GS
Consente il data-fusion
Scansione laser originale
la nuvola di punti ha una risoluzione spaziale di 1 mm
Ad ogni punto è assegnata l’informazione di colore sulla banda dell’infrarosso
Chiesa rupestre dei SS. Stefani - Vaste
(LE) ciclo pittorico databile tra l’XI e
il XII secolo
La scansione mediante
SIDART 100
Scansione laser originale
la nuvola di punti ha una risoluzione spaziale di 1mm
Ad ogni punto è assegnata l’informazione di colore sulla banda dell’infrarosso
Il nostro obiettivo
Integrare le competenze dei partner del
progetto SIDART per arrivare a concepire
e realizzare uno strumento portatile in
grado di integrare le potenzialità di un laser
a scansione con misure multispettrali.
SOFTWARE DI INTEGRAZIONE
Duplice scopo:
1) visualizzare, elaborare le nuvole di punti
acquisite dal Laser.
2)Integrare il dato tridimensionale con
l’informazione colorimetrica delle foto
multispettrali
SOFTWARE DI INTEGRAZIONE
Sviluppo di algoritmi basati su principi di fotogrammetria
per l’integrazione di dati geometrico/morfologici con dati
2D spazialmente risolti.
x=
y=
b1 X + b2Y + b3 Z + b4
b9 X + b10Y + b11Z + 1
b5 X + b6Y + b7 Z + b8
b9 X + b10Y + b11 Z + 1
X
0
Y
Z
1
0
0
0
0
− xX
− xY
0
0
0
X
Y
Z
1
− yX
− yY
Sono sufficienti 6 pti di corrispondenza
per calcolare i bi
b1
b2
b3
b4
b5
x
− xZ
=
b
⋅
6
− yZ
y
b7
b8
b9
b 10
b11
Integrazione del colore da una foto digitale proveniente da
Camera Semimetrica Rollei ad alta risoluzione (16 Mpixel)
Errore: 1.35 pixel
Errore sul dtm: 0.001 m
Disuniformità termiche possono essere indice di
distacchi, che possono essere geometricamente
individuati sul modello 3D
Immagine nella
banda
dell’ultravioletto
Visualizzazione dello spesso
particolare
In modalità wireframe,
originale e a colori
Filtro Passa Alto.
i primi risultati
Opificio delle Pietre Dure di Firenze – Croce
di Rosano. CROCE DIPINTA su supporto
ligneo, Secolo XII, Monastero di Rosano
Scansione 3D (SIDART 100)
Misure
effettuate
UV + Fluorescenza UV
Infrarosso I
Termografia
Immagine proveniente da riflettografia
Speciali occhiali dotati di lenti con
otturatori che operano in sincrono con
l’alternanza dell’immagine sul monitor.
Le due immagini
(destra e sinistra)
vengono contemporaneamente proiettate
sullo schermo; sfruttando due colori
complementari cyano e rosso
Il virtual reality center del CETMA è composto da tre
schermi che possono assumere due configurazioni “cad
wall” o “immersive cave”. Il sistema usa sei “Infitec
Technology Projector (two for screen)”
Infitec technology
Questa tecnologia necessita di due proiettori forniti di due filtri ottici
che suddividono lo spettro dei colori in due parti: una per l’occhio
sinistro e l’altra per quello destro
Le due immagini sono proiettate contemporaneamente sullo schermo
The computing system is based
on a ORAD cluster architecture
with twelve DVG (digital
videographic).
Each DVG is composed of two
render units (with two INTEL Xeon
CPU and one BFG 6800 Ultra
Nvdia graphic card)
These renders are chained each
other by means 1Gb ethernet
network
CONCLUSIONI
-Utilizzo e sviluppo di strumenti di diagnosi
portatili, non invasivi
-Integrazione tramite software
-Fornire all’operatore elementi utili aggiuntivi per
una corretta valutazione delle condizioni
dell’opera e dei processi di degrado
-Scegliere la strategia più idonea per l’intervento
di restauro