MISURE MECCANICHE E TERMICHE
A.A. 2012-2013
Lezione n.18 (26.11.2012)
MISURE DI
VELOCITA’
Si prendono qui in esame le misure di velocità lineari e angolari di solidi.
Le misure di velocità lineare sono basate sulla definizione di velocità v = s/t : generalmente si
misura (per esempio mediante un contatore di impulsi di frequenza noto), il tempo impiegato a
percorrere uno spazio noto.
Esempio di dispositivo basato su tale principio, e utilizzato per la misura della velocità di un veicolo, è
l’”autovelox”.
Gli autovelox dispongono solitamente di due sistemi emettitore - ricevitore assemblati in un’unica
apparecchiatura; l’emettitore è un led infrarosso (quindi viene emessa una radiazione non visibile); il
ricevitore è una fotocellula sensibile all’infrarosso.
I due sistemi basano il loro funzionamento sulla riflessione della luce da parte del corpo che passa
davanti all’emettitore; la luce riflessa viene quindi rilevata dal ricevitore.
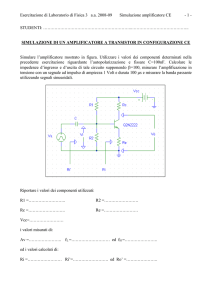
Il passaggio della testa di un veicolo attraverso il primo fascio ( A in figura), e la conseguente
riflessione rilevata dal ricevitore avvia un contatore; il passaggio della testa del veicolo attraverso il
secondo fascio (B in figura) e la conseguente riflessione arresta il contatore.
Nota la distanza tra i due sistemi, quindi fra le due fotocellule cellule, si calcola la velocità, una volta
rilevato l’intervallo di tempo impiegato ad attraversare i due fasci.
La precisione di questi dispositivi è molto elevata: si supponga che le due fotocellule si trovino a
distanza di 400 mm (la precisione del posizionamento sia di 0,5 mm). Si supponga che il clock del
contatore abbia una frequenza di 1 Mhz (precisione del contatore 1 s). Per un veicolo con velocità di
120 km/h (33.3 m/s), l’intervallo di tempo necessario a percorrere lo spazio tra le due fotocellule è di
12 ms. Quindi l’errore relativo sulla distanza è pari a 0,125 %, quello sull’intervallo di tempo è pari a
0,008 %; quindi l’errore sulla velocità (essendo l’errore sull’intervallo di temo trascurabile) è pari allo
0,125 %.
Sempre su misure indirette sono basati i “telelaser”. Il loro funzionamento, analogo a quello degli
autovelox, è basato sull’emissione di un fascio laser ad alta frequenza e sul rilevamento del fascio
riflesso dalla carrozzeria del veicolo da parte di una fotocellula.
Il telelaser misura il “tempo di volo” , cioè l’intervallo di tempo necessario al fascio laser per colpire il
bersaglio e tornare indietro al dispositivo fotoricettore: dal tempo di volo si passa alla distanza fra
sorgente laser e bersaglio (d = c*t, dove d è la distanza sensore-veicolo, c è la velocità della luce e t il
tempo di volo); emettendo due impulsi laser ad un intervallo di tempo prestabilito si ricavano due
distanze, la cui differenza è lo spazio s percorso dal veicolo in tale intervallo; è cosi possibile calcolare
la velocità del veicolo.
Le misure di velocità angolare sono molto importanti in campo meccanico sia perché consentono di
controllare il regolare funzionamento di un albero in rotazione, sia perché la velocità angolare è uno dei
due fattori (assieme alla coppia) che concorrono a determinare la potenza trasmessa da un albero, (e
quindi erogata da una macchina motrice o assorbita da una macchina operatrice).
Gli strumenti di misura della velocità angolare basano il loro funzionamento sia sulla definizione di
velocità angolare ω = /t (contagiri), sia su un qualche “effetto” della velocità stessa (tachimetri);
Nei contagiri ω deve rimanere costante durante l’intervallo di tempo t in quanto si misurano
separatamente l’angolo di rotazione e l'intervallo di tempo; i tachimetri possono invece fornire il
valore della velocità istantanea.
Gli strumenti possono essere di tipo meccanico, di tipo elettrico, di tipo ottico.
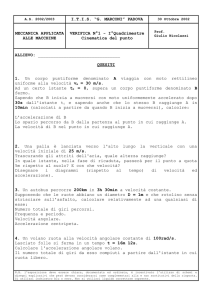
Fra gli strumenti di tipo meccanico si ricorda un tachimetro basato sul principio del regolatore di Watt.
r
m
Lo strumento è sensibile alla forza centrifuga F= mrω2 che agisce su ciascuna delle due sfere di massa
m, distanti r dall’asse di rotazione; lo strumento viene collegato all’albero di cui si vuole misurare la
velocità angolare ω.
A causa della forza centrifuga le sfere si allontanano dall’asse di rotazione dell’albero tanto più, quanto
più è elevata la velocità angolare; conseguentemente, l’indicatore x si sposta verticalmente verso l’alto.
La forza centrifuga è equilibrata dalla forza elastica di compressione della molla (F= kx ).
Si osservi che un cuscinetto reggispinta disaccoppia la parte rotante dello strumento da quella fissa.
A conti fatti, lo strumento non risulta lineare; va quindi tarato in modo da ottenere la x(ω).
Fra gli strumenti di tipo elettrico si ricorda il tachimetro a correnti parassite o tachimetro magnetico.
Gli elementi fondamentali dello strumento sono due alberini. folli tra loro. Il primo (a sinistra), è
collegato a un estremo all’albero che ruota con velocità angolare incognita ω ; all’altro estremo di
questo alberino viene fissato un magnetino permanente. Al secondo alberino (a destra) è collegata una
cappa a forma di bicchierino in materiale conduttore non magnetico. Il magnetino solidale al primo
alberino ruota dentro la cappa cilindrica; il secondo alberino, porta cappa, è reso solidale al telaio dello
strumento per mezzo di una molla elastica di richiamo.
Quando il magnetino è posto in rotazione alla velocità ω induce nella cappa correnti parassite. Le
correnti indotte nella cappa danno origine a un campo magnetico che si oppone a quello del magnetino.
Avrebbe così origine una coppia che tenderebbe a trascinare nella rotazione la cappa; a questa si
oppone la coppia elastica della molla di richiamo.
A conti fatti, all’equilibrio delle due coppie, l’angolo di rotazione θ dell’alberino porta cappa risulta
proporzionale alla velocità angolare ω e lo strumento è quindi lineare.
I tachimetri meccanici trovano applicazione in campo automobilistico nel rilevamento della velocità
angolare delle ruote; noto il raggio delle ruote è così possibile risalire alla velocità del veicolo.
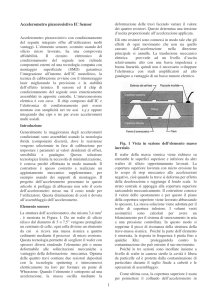
Fra gli strumenti di tipo ottico si ricorda un contagiri basato sul rilevamento degli impulsi riflessi da un
riferimento (sull’albero in rotazione) su una fotocellula.
E
R
ω
Più dettagliatamente, un raggio luminoso emesso da una sorgente viene riflesso da un riferimento posto
sull’albero e rilevato da una fotocellula facente parte di un circuito alimentato da una tensione E e
chiuso su una resistenza R. A ogni riflessione corrisponde un impulso di tensione che può essere
rilevato tramite la resistenza R. Contando quindi gli impulsi in un intervallo prestabilito t, si può
risalire alla velocità angolare.
Il vantaggio degli strumenti ottici rispetto a quelli di altro tipo è il non assorbimento di potenza
meccanica e quindi l’assenza di errore di inserzione.
MISURE DI ACCELERAZIONE
Le misure di accelerazione sono di particolare importanza per le numerose applicazioni.
Misurando l’accelerazione a di un veicolo se ne possono determinare alcune prestazioni; in particolare
si determinano le prestazioni in caso di accelerazione o frenata (decelerazione); importanti anche le
applicazioni nel caso di crash test (urto).
Nel caso di un veicolo aeronautico o spaziale si può sapere se l’accelerazione è tollerata da chi si trova
a bordo del veicolo stesso; con doppia integrazione si può determinare la traiettoria del veicolo e
confrontarla con quella programmata (navigazione inerziale).
Da a(t), con doppia integrazione si passa a s(t); è possibile misurare vibrazioni evitando il problema del
punto fisso (v. oltre).
Gli esempi riportati mostrano come le misure di accelerazione sono prevalentemente misure dinamiche;
è quindi necessario realizzare dispositivi di misura caratterizzati da elevata rapidità
Si consideri ora il principio di funzionamento di un accelerometro: se a è l’accelerazione da misurare, e
se l’accelerazione viene “sentita” da una massa (detta massa sismica) pari ad m, si ha una forza
d’inerzia F = -ma che può essere rilevata con un dinamometro elastico (k: rigidezza della molla);
l’allungamento della mollal è dato da:
l = F/k = -ma/k .
k
Un accelerometro è quindi un dispositivo del II° ordine caratterizzato da pulsazione propria n
m
Realizzazione degli accelerometri
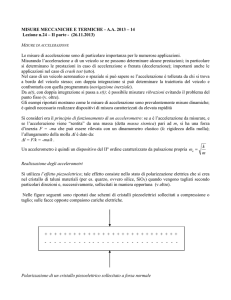
Si utilizza l’effetto piezoelettrico; tale effetto consiste nello stato di polarizzazione elettrica che si crea
nel cristallo di taluni materiali (per es. quarzo, ovvero silice, SiO2) quando vengono tagliati secondo
particolari direzioni e, successivamente, sollecitati in maniera opportuna (v.oltre).
Nelle figure seguenti sono riportati due schemi di cristalli piezoelettrici sollecitati a compressione o
taglio; sulle facce opposte compaiono cariche elettriche.
+ + + + + + + + + + + + + + + + + + + + + + + + + + + +
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Polarizzazione di un cristallo piezoelettrico sollecitato a forza normale
- - - - -
+ + + + + + + + + + + + + + + + + + + + + + + + + + + +
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - Polarizzazione di un cristallo piezoelettrico sollecitato a taglio
Per realizzare
si prende pertanto una massa di piccola entità (anche frazioni di
- un
- -accelerometro
- grammo) e la si rende solidale a un cristallo piezoelettrico.
Se la massa sente un’accelerazione, la forza d’inerzia sollecita il cristallo; quest’ultimo si carica
elettricamente; la carica Q (la sensibilità è dell’ordine dei pC/N) viene convertita in una tensione V .
Se il cristallo è dotato di due armature che ne fanno un condensatore di capacita C; il valore della
tensione è dato da V= Q/C.
a
Fin = - ma
m
V = Q/C
Schema di accelerometro sollecitato a forza normale
a
Fin = - ma
m
V = Q/C
Schema di accelerometro sollecitato a taglio
Quanto sopra non è però così semplice: infatti l’elevata impedenza d’uscita del sensore confrontata con
la bassa impedenza d’ingresso dello strumento di misura della tensione, è causa di un non corretto
accoppiamento elettrico.
Occorre pertanto studiare dettagliatamente l’effetto piezoelettrico per poter essere in grado di far
funzionare correttamente accelerometri ed altri sensori (per es. manometri), basati sullo stesso effetto.
EFFETTO PIEZOELETTRICO
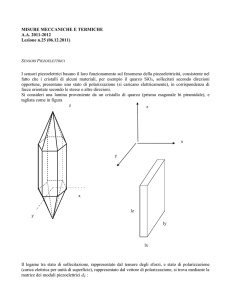
Si consideri una lamina proveniente da un cristallo di quarzo (prisma esagonale bi piramidale), e
tagliata come in figura
z
z
x
y
x
lz
y
ly
lx
Il legame tra stato di sollecitazione, rappresentato dal tensore degli sforzi, e stato di polarizzazione
(carica elettrica per unità di superficie), rappresentato dal vettore di polarizzazione, si trova mediante la
matrice dei moduli piezoelettrici dij :
Px
d11 d11 0 d14 0 0
Py = 0 0 0 0 d14 2d11
Pz
0 0 0 0 0 0
x
y
z
yz
zx
xy
Per il quarzo si verifica pertanto la comparsa di cariche elettriche sulle facce di normale x, sia per sforzi
normali alle stesse facce (o alla e facce di normale y), sia per sforzi di taglio sulle facce y^z.
ly
Q x d11 Fx ; Q x d11 Fy ; Q x d14T yz
lx
Anche sulle facce di normale y possono comparire cariche elettriche per sforzi di taglio. Una pressione
idrostatica non polarizza il cristallo.
I moduli piezoelettrici dij , come accennato in precedenza, sono dell’ordine di 10-12 pC/N.
Alcune sostanze piezoelettriche come la tormalina e il sale di Seignette hanno matrice piezoelettrica
analoga a quella del quarzo; altre sostanze hanno moduli non nulli diversi.
Applicando a una lamina di quarzo opportunamente tagliata due armature, si realizza un condensatore
S
di capacità C
(S = lylz; h = lx). A una carica elettrica Q corrisponde pertanto una tensione
h
Q
V .
C
++++++++++
V
-------- ---
Sensore
Amplificatore
Sembra quindi possibile associare immediatamente a una carica elettrica presente sulle facce della
lamina (carica dovuta a una sollecitazione meccanica), una tensione V, cioè un segnale che potrà essere
elaborato (in particolare amplificato), e quindi visualizzato da uno strumento terminale. L’effetto
piezoelettrico sembra quindi rendere possibile l’immediata realizzazione di sensori di forza, di
accelerazione, di pressione, ….
In realtà, come già accennato, le cose non sono così semplici: infatti l’elevata impedenza d’uscita del
sensore (1/C , al limite tendente a infinito in caso statico), confrontata con la relativamente bassa
impedenza d’ingresso dell’amplificatore (ordine del M), è causa di un non corretto accoppiamento
elettrico, il ché significa in pratica che si verifica una dispersione di cariche elettriche con conseguente
inutilizzabilità dei sensori piezoelettrici in caso statico e comunque a basse frequenze.
Per capire che cosa accade, si schematizzi il sensore piezoelettrico come un generatore di corrente con
in parallelo un condensatore di capacità Cp (cristallo piezoelettrico, un condensatore di capacità Cc
(cavo di collegamento), una resistenza Ra (resistenza di ingresso dell’amplificatore).
i
Q=dijF
Ra
Cp
Sensore
Cc
Cavo
Amplificatore
Occorre legare la F(t), applicata al sensore, alla V(t) presente all’ingresso dell’amplificatore; in terrmini
simbolici, occorre determinare la V (jω)/ F (jω); si può scrivere:
V ( j ) V I X
,
F ( j ) I X F
ove I (jω) è la forma simbolica della corrente i(t) che scorre nel circuito in figura, e X è la forma
simbolica di h, variazione della distanza fra le facce della lamina di quarzo.
Per quanto riguarda V / I , è immediato dimostrare che tale termine è pari all’impedenza Z del circuito
in figura; poiché:
1
1
j (C p C c )
,
Ra
Z
segue che:
Z
Ra
.
1 jRa (C p Cc )
Per quanto riguarda I / X , tenendo conto che i = dQ/dt ,e che quindi I =jωQ, e che detto
semplicemente dij il modulo piezoelettrico considerato per la lamina nella configurazione di lavoro, si
ha:
Q = dijF = dijkx,
ove k è la rigidezza della lamina, risulta:
x(t)=Q(t)/ dijk,
e quindi :
X = Q /dijk.
Segue che :
I
X
jQ
Q / d ij k
jd ij k .
Infine, per quanto riguarda X / F , basta ricordare che la lamina è un sistema del II° ordine; detta m la
massa e quindi = k/m la pulsazione propria, e il coefficiente di smorzamento, risulta:
X
F
1/ k
j
1 2 j
( )2
n
n
.
A conti fatti:
V
F
Ra
jd ij k
1 jRa (C p C c )
jRa (C p C c )
1/ k
j
1 2 j
( )2
n
n
d ij
1 jRa (C p C c ) (C p C c )
d ij
j
1 j (C p C c )
=
1
j
1 2 j
( )2
n
n
=
1
,
j 2
1 2 j
( )
n
n
ove = Ra (Cp + Cc) è la costante di tempo del circuito in figura.
Il sensore non è quindi utilizzabile alle basse frequenze (e, a maggior ragione, in caso statico), e alle
altissime frequenze per i bassi valori di . Alle alte frequenze n = 2∙105 rad/s, alle basse frequenze,
con , per es., Cp = 1600 pF, Cc = 600 pF, Ra = 1M, risulta = 2,2 ms.
Per superare gli inconvenienti che si verificano alle basse frequenze occorre allora ricorrere come
primo stadio dell’amplificatore, a un preamplificatore o amplificatore di carica, che è un particolare
amplificatore operazionale con un condensatore Cf di elevata capacità nel circuito di reazione. Si opera
quindi con un dispositivo come quello schematizzato nella figura seguente.
if
Rf
i
Cf
A
Cp
Q
Cc
Vi
Vu
Sensore
Cavo
Amplificatore di carica
Amplificatore
Come per tutti gli amplificatori operazionali, anche per l’amplificatore operazionale si può considerare
un’impedenza di ingresso infinita e quindi si può scrivere:
i + if = 0,
ove if è la corrente di reazione.
Utilizzando le espressioni del calcolo simbolico:
I If 0.
Poiché I jQ, e
I f jC f Vu ,
risulta in definitiva:
Q
.
Vu
Cf
Ciò è vero a patto che sia Cf >> Cp + Cc ; in tal caso infatti la corrente segue la via di “minor
impedenza”.
La tensione Vu è, almeno idealmente, indipendente dalla pulsazione del segnale ; tenendo però conto
della resistenza Rf (Rf ~ 0,1 M ), in parallelo a Cf (Cf ~ 104 pF), risulta ~ 1s.
Inoltre la sensibilità non dipende dalla capacità del cavo Cc il ché costringerebbe a calibrare il tutto
ogni volta che si sostituisce il cavo di collegamento.
Rimangono ovviamente i limiti meccanici alle altissime frequenze cioè per = n (possibile risonanza
della lamina di quarzo).
Per concludere, l’uso dell’amplificatore di carica, cui seguirà un normale amplificatore di tensione,
consente l’uso dei sensori piezoelettrici come gli accelerometri.
Integrando due volte il segnale degli accelerometri, si possono rilevare spostamenti e quindi vibrazioni
(v. oltre).
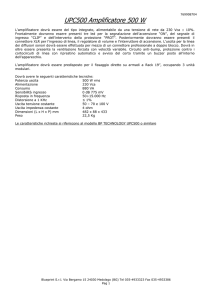
Negli accelerometri usati correntemente il cristallo è sollecitato a taglio; infatti, nel caso di forza
normale se l’accelerazione è diretta verso l’alto e la forza d’inerzia verso il basso il cristallo è
sollecitato a compressione e si polarizza regolarmente; se invece l’accelerazione è diretta verso il basso
e la forza d’inerzia verso l’alto possono esserci problemi per la polarizzazione del cristallo.
Uno schema tipico di accelerometro è riportato in figura: tre cristalli piezoelettrici (in rosso) sono
solidali a un prisma triangolare e tre masse sismiche (in giallo) sentono l’accelerazione (diretta verso
l’alto o verso il basso), sollecitando a taglio i cristalli.
Gli accelerometri piezoelettrici, con masse sismiche dell’ordine visto (anche, frazioni di grammo),
rigidezze elevatissime (il cristallo di quarzo costituisce la “molla”), hanno frequenze di risonanza fn =
n/2 dell’ordine delle centinaia di kHz e bande passanti dell’ordine della de
Accelerometro piezoelettrico sollecitato a taglio
Taratura degli accelerometri
L’accelerazione di gravità g è un campione di accelerazione disponibile; ma per la taratura occorrono
più campioni; allo scopo si può disporre l’accelerometro da tarare su una piattaforma rotante a velocità
w angolare variabile ; l’accelerometro va disposto con asse secondo il raggio; l’accelerazione sentita è
l’accelerazione centripeta a = – 2r, cui corrisponde una forza centrifuga F = m2r.
piattaforma rotante
accelerometro