Materiali magnetici permanenti
54
5 Materiali magnetici permanenti
5.1 Materiali ferromagnetici ad alta isteresi
I materiali magnetici permanenti sono materiali ferromagnetici caratterizzati da un’elevata
isteresi, in fig.1 è mostrata una generica caratteristica B(H) di questi materiali, nel quadrante
d’impiego (secondo quadrante).
L’induzione residua (Br), rappresenta il valore di induzione presente nel materiale magnetico
magnetizzato, quando l’intensità del campo magnetico Hm è nulla; il campo coercitivo Hc è il
valore dell’intensità del campo magnetico H che occorre applicare al circuito magnetico per
annullare il valore dell’induzione magnetica Bm, e quindi smagnetizzare il magnete.
Bm(T)
ginocchio
Br
II°
Hm(kA/m)
Hc
Figura 1: Caratteristica Bm Hm
Tale caratteristica è in realtà una parte del ciclo d’isteresi caratteristico di ciascun materiale
ferromagnetico. Genericamente l’andamento di questo ciclo è simile a quello mostrato in fig.2.
Bm
Hm
Figura 2: Ciclo d'isteresi magnetica
Solitamente viene rappresentato il ciclo limite, cioè quello più esterno, ma non è detto che il
materiale magnetico percorra sempre questo ciclo: dipende dai valori di campo e induzione
magnetica raggiunti. E’ importante notare che nei materiali ferromagnetici, il ciclo d’isteresi
comporta una dissipazione di energia pari all’area sottesa alla curva.
La pendenza della curva B(H) mi caratterizza il parametro di permeabilità magnetica μ:
μ=
B
H
Tale parametro, per materiali ferromagnetici ad alta isteresi, assume valori elevati.
La magnetizzazione del materiale ferromagnetico può essere fatta nel circuito magnetico
d’impiego oppure in fabbrica. La scelta fra queste due opzioni dipende dalle caratteristiche del
materiale e da esigenze produttive. Naturalmente magnetizzare il materiale in fabbrica è
Materiali magnetici permanenti
55
economicamente vantaggioso, ma poi deve essere trattato con molta cura, anche durante la fase di
montaggio, viceversa la magnetizzazione nel circuito d’impiego comporta un maggior costo, però
per certi materiali, come vedremo non c’è alternativa.
Consideriamo ora il magnete inserito in un circuito magnetico ideale:
•
•
Materiale ferromagnetico con μ → ∞
Flusso disperso nullo
μ
magnete
H B
m
traferro
N
H B
a
a
(l , S )
m
(l , S )
m
οο
S
m
a
a
NI
Figura 3: Circuito magnetico ideale
Esso è composto dalle seguenti parti: il magnete (avente lunghezza totale lm e sezione costante in
ogni suo punto pari a Sm), il traferro ossia la parte del circuito magnetico in aria (avente lunghezza
totale la e sezione costante in ogni suo punto pari a Sa), il materiale ferromagnetico ideale (μ → ∞)
e l’avvolgimento di eccitazione (composto da N spire e percorso da corrente I). Il punto di lavoro
del magnete è dato da Hm e Bm mentre quello del traferro è individuato da Ha e Ba.
Dalla legge di Ampere ricaviamo che:
H m l m + H a l a = NI
Dove si è supposto che nel materiale ferromagnetico non ci sia caduta di tensione magnetica
(μ→∞).
In condizioni ideali ipotizziamo nullo il flusso disperso:
Φ = BS ⇒ Bm S m = Ba S a
Cerchiamo ora di mettere in evidenza la relazione fra Bm ed Hm imposta dal circuito magnetico,
cioè la retta di carico, che poi con la caratteristica del materiale magnetico ci permette di
determinare il punto di lavoro del magnete.
Dalla precedente relazione si ottiene:
Bm = Ba
Sa
Sm
Dalla definizione di permeabilità magnetica si ha:
Ba = μ 0 H a
nella quale μ0 rappresenta la permeabilità magnetica del vuoto, che coincide con quella dell’aria.
Dalle due equazioni precedenti si hanno:
S
Bm = μ 0 H a a
Sm
Sostituendo Ha, ricavato dalla legge di Ampere, si giunge alla forma:
Materiali magnetici permanenti
56
NI − H m l m S a
la
Sm
Esplicitando il coefficiente angolare e gli altri parametri, si deduce che la precedente relazione è
l’equazione di una retta, la retta di carico appunto:
Bm = μ 0
lm S a ⎛
NI ⎞
⎟
⎜⎜ − H m +
la S m ⎝
l m ⎟⎠
Tale retta è funzione di NI , al variare di questo parametro si ha un fascio di rette parallele:
Bm = μ 0
Bm
NI=0
NI>0
NI<0
α
Hm
Figura 4: Retta di carico nel piano (Hm, Bm)
Il coefficiente angolare della retta di carico è negativo e vale:
tan α = − μ 0
lm S a
la S m
Il punto di lavoro del magnete dipenderà dalla forza magneto-motrice applicata (NI).
Rappresentando in termini di flusso magnetico e f.m.m. l’equazione della retta di carico, vi è una
similitudine fra circuito magnetico e circuito elettrico:
f.m.m. ←⎯→ f.e.m.
riluttanza magnetica ←⎯→ resistenza elettrica
flusso ←⎯→ corrente elettrica
Bm S m = μ 0
Sa
(− H m l m + NI )
la
BmSm
μ0
Sa
la
Hmlm
magnete
NI
Figura 5: Circuito elettrico equivalente
Materiali magnetici permanenti
57
5.2 Punto di lavoro
Analizziamo ora la caratteristica di magnetizzazione. Si può notare in figura, che il punto di
lavoro del magnete è dato dall’intersezione della retta di carico con la curva di magnetizzazione
del magnete. Nel caso di magnete smagnetizzato, in assenza di f.m.m. (NI=0) il punto di lavoro
è nell’origine, all’aumentare di NI esso si sposta verso M, lungo la curva di prima
magnetizzazione. Se dopo si annulla la f.m.m. (NI=0), il punto di lavoro si porta in P0, non si
ritorna nell’origine: il magnete è stato magnetizzato.
Bm
NI > 0
P0
M
Hm
0
NI = 0
Figura 6: Punto di lavoro
Esistono due modi per variare il punto di lavoro:
1. variando la dimensione del traferro (⇒ varia il coefficiente angolare della retta di carico)
2. applicando dall’esterno una f.m.m. (⇒ la retta di carico trasla orizzontalmente)
Punto di lavoro a NI = 0
Bm
P0
P
Bm0
P`
Hm
Hc Hm0
Figura 7: Punto di lavoro a NI=0
In questo caso si può notare che:
Se si aumenta il traferro il coefficiente angolare in valore assoluto diminuisce, dato il segno
negativo, la retta ruota in senso antiorario, quindi il punto di lavoro si porta da P0 a P. Se si supera il
ginocchio, anche riportando il traferro alla dimensione precedente, il punto di lavoro non tornerà più
in P0 bensì in P’. Il circuito magnetico quindi non lavorerà più sul ciclo limite poiché si sarà
spostato in un ciclo interno. Siamo quindi incappati in un processo di smagnetizzazione: è un effetto
indesiderato. Da questo fatto si può facilmente intuire perché si sceglie di magnetizzare alcuni
magneti nel circuito definitivo, altrimenti c’è il rischio di smagnetizzazione.
Punto di lavoro a NI ≠ 0
Analogamente al caso precedente, se si applica al circuito magnetico una NI < 0 tale da superare il
ginocchio, quando si annulla la f.m.m. non si torna in P0, bensì in P’’. Anche stavolta si incorre in
un fenomeno di smagnetizzazione.
Materiali magnetici permanenti
58
Tale smagnetizzazione può avvenire nei motori, dove NI varia da punto a punto.
Bm
P0
NI<0
P“
P
Hm
Hc
Figura 8: Punto di lavoro a NI≠0
Dai due casi precedenti, si capisce che il “ginocchio” caratteristico del ciclo d’isteresi è un effetto
non lineare indesiderato, quindi da evitare. Per ovviare a questo problema è necessario scegliere un
materiale ferromagnetico il più possibile vicino al materiale ideale:
-
caratteristica rettilinea (reversibile, quindi non “a ginocchio”) nel secondo quadrante
per smagnetizzare il materiale, occorre portarlo a Bm < 0
pendenza (cioè permeabilità magnetica) minore possibile (≈ μ0) (così Hc è molto elevato).
In questo caso la curva si può approssimare con:
Br ≈ μ 0 H c
Bm
Br
μ0
Hm
Hc
Figura 9: Caratteristica ideale
Dato che ora la caratteristica del magnete è lineare, si può fare l’analogia con il circuito elettrico:
magnete
BmSm
Ga
Hmlm
Gm
Hclm
NI
Ga = μ0
Sa
la
Gm = μ0
Sm
lm
Figura 10: Circuito elettrico equivalente
Materiali magnetici permanenti
59
5.3 Tipologie di materiali magnetici permanenti
-
-
Leghe AlNiCo (alluminio, nichel, cobalto): sono leghe usate fino a 15-20 anni fa; il circuito
magnetico deve essere magnetizzato “in loco”, inoltre il punto di lavoro deve variare poco per
evitare il rischio di smagnetizzazione. Hanno alta induzione residua e basso campo coercitivo
che portano dunque ad una permeabilità magnetica molto superiore a quella del vuoto.
Ferriti: sono materiali magnetici a bassa induzione residua e permeabilità magnetica simile a
quella del vuoto, però la caratteristica è simile a quella di un magnete ideale.
Terre rare: sono le leghe usate attualmente, date le loro alte prestazioni: hanno alta induzione
residua e permeabilità magnetica simile a quella del vuoto. La lega SmCb (samario, cobalto)
veniva usata fino a pochi anni fa; la lega NdFeB (neodimio, ferro, boro) è quella, attualmente,
più usata.
Bm
eB
F
Nd
Co AlNiCo
Sm
e
rit
fer
1
0,5
Hm
500
Figura 11: Diversi tipi di materiali magnetici
5.4 Dipendenza dalla temperatura
Come abbiamo già anticipato, tutti i materiali magnetici variano le loro caratteristiche in
seguito ad una deriva termica, fino a giungere (per elevate temperature: “punto di Curie”) alla
completa smagnetizzazione (irreversibile).
All’atto pratico, la variazione dell’induzione residua (per °C) di alcuni materiali può essere
così riassunta:
-
ferriti: -0.2%
SmCo (samario, cobalto): -0.05%
NdFeB (neodimio, ferro, boro): -0.1%
Da notare che per le ferriti, la deriva di Hc ha segno opposto a quella di Br , provocando una
variazione di pendenza nella caratteristica meccanica (che invece resta costante per gli altri due
materiali).
Motori in C.C.
60
6 Motori in corrente continua
Per lo studio dei motori è conveniente ripassare alcuni concetti legati all’elettromagnetismo:
6.1 INDUZIONE ELETTROMAGNETICA
Al variare del flusso concatenato in una spira, immersa in un campo magnetico, viene indotta una
f.e.m. Tale fenomeno segue la legge dell’induzione elettromagnetica (Faraday-Neumann):
la forza elettromotrice indotta in una spira è direttamente proporzionale alla velocità con
cui varia il flusso magnetico concatenato con la spira
e(t ) = −
dΦ c
dt
(1)
(2)
Il flusso magnetico Φc è espresso dalla relazione:
Φ c = ∫ BdS
(2)
A
dove A è una superficie chiusa sulla spira.
Se abbiamo N spire si ha:
e (t ) = − N
dΦ C
dt
(3)
L’intensità della f.e.m. [e(t)] è proporzionale alla variazione di Φc . Il flusso concatenato può variare
per due motivi:
• si sposta la spira (varia l’area concatenata al flusso)
• varia il campo magnetico
Il significato del segno – nell’equazione (1) è una conseguenza della legge di Lenz:
la forza elettromotrice indotta tende a produrre una corrente che, a sua volta, crea un
campo magnetico che si oppone alla variazione di flusso.
In altre parole, la corrente indotta tende a mantenere costante il valore originario del flusso
magnetico (principio dell’azione e reazione).
6.2 Correnti parassite (Foucault)
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
61
Ogni volta che un corpo conduttore è sottoposto all’azione di un flusso magnetico variabile e/o
quando si muove in un campo magnetico, nascono all’interno dello stesso delle correnti indotte,
dette correnti parassite o di Foucault.
Le correnti parassite sono dannose, poiché dissipano energia elettrica in calore per effetto Joule.
Inoltre, poiché tali correnti si oppongono a chi le ha generate (per la legge di Lenz), in un
conduttore in movimento producono una coppia che si oppone al moto, dando luogo ad un effetto
frenante.
Per ridurre queste perdite di energia, si cerca di realizzare il materiale ferromagnetico con una
elevata resistività e lo si suddivide in tanti strati sottili paralleli alle linee di flusso, separati da strati
di materiali isolanti (lamierini isolati).
Questa struttura stratificata aumenta la resistenza elettrica dei possibili percorsi delle correnti
parassite, e quindi ne riduce l’intensità.
Questo tipo di struttura è comunemente usata nei rotori, per ridurre al minimo le correnti parassite,
aumentando in tal modo l’efficienza del dispositivo.
Altra strategia realizzativa è quella di utilizzare materiale ad alta resistività, come ad esempio il
silicio.
6.2.1 Cenni sull’induttanza di dispersione :
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
62
Dato un circuito magnetico non ideale (permeabilità magnetica μ≠∞) non tutto il flusso generato si
chiude nel ferro ma, in parte, si richiude nell’aria.
λM= flusso magnetico nel ferro
λD= flusso magnetico disperso nell’aria
:
Il flusso magnetico totale generato dall’avvolgimento sarà quindi dato da: λ=λM+λD .
Per cui la f.e.m. risulterà essere, secondo la (3):
e = −N
dλ M
dλ D
dλ
= −N
− N
dt
dt
dt
(4)
La relazione fra il flusso λD e la dispersione della corrente è di tipo lineare, infatti B=μ0H, per cui è
possibile definire un’autoinduttanza λD= LDi, così la (4) diventa :
dλ M
di
− NL D
dt
dt
e = −N
Considerando LDI =NLD
risulterà essere:
,
(5)
il circuito elettrico corrispondente al circuito magnetico di partenza
R
v(t) + e = Ri
e
v(t) = Ri + LD
I
dλ
di
+N M
dt
dt
Quindi LDI viene considerato come un coefficiente di autoinduzione, anche se correttamente
sarebbe una induttanza di dispersione.
6.3 Forza elettromagnetica
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
63
Se un conduttore rettilineo di lunghezza l è percorso da una corrente I, la forza che agisce sul filo
quando viene posto in un campo magnetico uniforme B, è espressa dalla relazione:
F = lI × B
(6)
F = IlBsin α
il cui modulo vale:
dove α è l’angolo compreso fra il vettore⎯I e il vettore campo magnetico B. La direzione della forza
⎯F è perpendicolare al piano formato da ⎯I e ⎯B e il verso si determina con la regola della mano
destra o della vite destrosa.
La forza ⎯F è massima per α=90° e si annulla per α=0°.
•
spira rettangolare
Si consideri una spira rettangolare rigida, libera di muoversi attorno a un proprio asse di simmetria,
percorsa da una corrente I, immersa in un campo magnetico uniforme che forma un angolo θ
rispetto al piano della spira.
Le forze agenti sui lati di lunghezza a si annullano reciprocamente e non danno luogo ad alcun
momento poiché si trovano sulla stessa retta di azione. Se invece la spira non fosse rigida, tali forze
non si annullerebbero ma tenderebbero ad allungare la spira stessa.
Le forze che agiscono sui lati di lunghezza l danno luogo ad una coppia T:
T = F ⋅ b = Fa cos θ = lBIa cos θ = SBI cos θ
(7)
dove S=l×a è l’area della spira.
In generale, anche per una spira non rettangolare vale:
T = SBI cosθ
Università degli studi di Ferrara
(8)
Azionamenti Elettrici
Motori in C.C.
64
Tale coppia assume valore massimo per θ=0 e si annulla per θ=90°.
Il verso di T è tale da far ruotare la spira in modo da massimizzare il flusso concatenato e quindi
porla perpendicolarmente al campo magnetico.
Per avere coppia massima in un range di θ più ampio, si cerca di mantenere la condizione θ=0 per
un intervallo più lungo possibile.
L’andamento della coppia in funzione di θ è:
T
π
θ
Invertendo la corrente al di fuori dell’intervallo [-π/2,π/2] si può ottenere una coppia che ha sempre
lo stesso verso ma con un ripple elevato:
T
θ
Ricordando che:
si ha che:
Φ C = BSsinθ
T =I
dΦ C
dθ
(9)
6.4 Struttura di un motore in CC
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
65
Il motore elettrico in corrente continua è costituito da una parte fissa detta statore e da una parte
libera di ruotare attorno al proprio asse di simmetria detta rotore
Lo statore ha il compito di generare il campo magnetico e questo può essere realizzato in due modi:
•
con magneti permanenti: questa scelta viene fatta solo per le piccole potenze altrimenti il costo
sarebbe elevato.
• con un avvolgimento detto di eccitazione:: vengono utilizzati per le potenze elevate.
Hanno il vantaggio di permettere il controllo del flusso di eccitazione e quindi di realizzare il
deflussaggio.
Il rotore è costituito da un cilindro di materiale ferromagnetico laminato (lamierini isolati per
abbassare il valore delle correnti parassite di Foucault) e presenta una serie di scanalature dette cave
dove viene inserito l’avvolgimento di armatura . Le cave presentano un’apertura, sono infatti
semichiuse, per permettere l’introduzione dei conduttori dell’avvolgimento, e sono anche inclinate,
nei motori di elevata qualità, per realizzare una struttura magneticamente “isotropa”, cioè con una
variazione di riluttanza ridotta, per evitare i problemi di “cogging”.
I conduttori dell’avvolgimento di armatura sono collegati in serie tra di loro per mezzo di un
dispositivo detto collettore., costituito da lamelle isolate fra di loro. La corrente viene portata, da
una sorgente esterna, sui conduttori dell’avvolgimento di armatura, tramite delle spazzole, realizzate
con un materiale conduttore, che sono a contatto con il collettore.
6.5 Principio di funzionamento di un motore in CC
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
66
Supponiamo che il campo magnetico sia realizzato da due magneti (o da un avvolgimento di
eccitazione) in modo da avere un ampio sviluppo a traferro costante nel quale l’induzione è
uniforme e ad andamento radiale.
Questo accorgimento ci permette di avere la coppia massima per un range ampio della posizione.
Supponiamo di alimentare l’avvolgimento di armatura con una corrente costante ia.
In figura è indicato l’andamento dell’induzione magnetica al traferro in funzione della posizione.
Azione di commutazione
Tramite il generatore di corrente forniamo una corrente ia all’avvolgimento (consideriamo per
semplicità una sola spira) sfruttando il contatto spazzole-collettore (in fig. s1, s2 ):
Asse di riferimento
rispetto al quale
valuto θ
Corrente entrante:
dalla relazione
F = lI × B ho una
forza diretta verso
il basso
Corrente uscente:
dalla relazione
F = lI × B ho una
forza diretta verso
l’alto
Asse neutro
Fig.1
In questa prima fase in cui l’angolo di rotazione θ=0 (piano della spira allineato con l’asse di
riferimento) le 2 forze F applicate alla spira danno luogo ad una coppia (Tem) che genera una
rotazione antioraria (ωem). In questa posizione la coppia è massima perché è massima l’induzione B
(vedi andamento induzione B in funzione della posizione a pag. precedente).
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
67
θ=90°
Fig.2
L’asse della spira è ruotato di 90° . In questa posizione l’induzione è nulla per cui anche la coppia
sarà nulla: Tem=0
FASE CRITICA
θ=180°
Fig.3
Mediante il sistema spazzole-colletore si realizza l’inversione della corrente sulla spira, in modo da
ottenere la stessa situazione di fig. 1 e quindi avere sempre una coppia con verso antiorario.
Notiamo ora che:
dλ
⎧
⎪⎪T = dθ ia
⇒
⎨
⎪e = dλ = dλ dθ = dλ ω
⎪⎩
dt dθ dt dθ
se
⎧ i a = costante
⎨
⎩ω = costante
allora T ed e (coppia e forza controelettromotrice) hanno lo stesso andamento in funzione di θ.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
68
Inoltre si nota come entrambe presentino un ampio ripple in corrispondenza delle fasi critiche
(θ=90°, θ=270°, …).
Calcoliamo la coppia e la f.e.m.:
supponendo che la spira sia ruotata di un angolo θ rispetto alla direzione del campo B.
•
Caso in cui il campo magnetico ha le linee di flusso parallele:
λc = λcMAX senθ dove λcMAX è il
valore massimo del flusso che si
θ
concatena con la spira quando
θ=90°
La coppia è data da:
T = λcMAX ia cos θ = SBia cos θ
Come si nota la coppia è proporzionale al cosθ.
•
Caso in cui il campo magnetico ha le linee di flusso radiali
Considerando un angolo infinitesimo dθ:
ds = rdθ se l è la lunghezza, la superficie
dell’arco sarà: dS = lds , quindi il flusso concatenato:
dλc = B 2dS = B 2rldθ
dλc
B 2rldθ
⎧
ia =
ia = B 2lria
⎪T =
quindi ⎨
dθ
dθ
⎪⎩e = B 2rlω
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
69
Quindi T è costante ed ha valore massimo pari a T=2lrBia nell’intervallo in cui il flusso è costante,
mentre la f.e.m. indotta, nello stesso intervallo, è proporzionale alla velocità angolare.
Caso di quattro avvolgimenti
•
θ=0
Gli avvolgimenti sono collegati (tramite le spazzole) al generatore di corrente in modo tale da avere
un parallelo di due avvolgimenti in serie. Supponendo che, tutti e quattro gli avvolgimenti, siano
nella zona con campo magnetico radiale la coppia generata risulta massima. La corrente ia si divide
equamente tra i due circuiti del parallelo.
La coppia prodotta su ogni avvolgimento ha la stessa direzione in quanto è la direzione di ia a
determinare il verso della coppia. La polarità della f.c.e.m. dipende solo dalla direzione della
rotazione.
•
θ=45°
θ = 45°
Due avvolgimenti sono in cortocircuito e quindi, avendo solo due circuiti alimentati, la coppia che
si ottiene è dimezzata. Si ha comunque una coppia non nulla e quindi un notevole miglioramento
rispetto al caso precedente (una singola spira). Il ripple di coppia avrà frequenza π/2 (doppia
rispetto alla precedente).
•
θ=90°
θ = 90°
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
70
Ritroviamo la situazione di θ=0°
Considerazioni:
Aumentando il numero di avvolgimenti:
1. diminuisce il ripple di coppia e aumenta la frequenza del ripple stesso
2. diminuisce il ripple della f.c.e.m.
3. aumenta la coppia T prodotta
Normalmente si arriva ad usare 30÷40 avvolgimenti (o fasi).
Sfruttando i risultati precedentemente ottenuti nel caso della spira calcoliamo il valore della coppia:
Avevamo:
T = B 2rlia = na Brlia
e = B 2rlω = na Brlω
dove na rappresenta il numero di conduttori.
Nel caso di quattro avvolgimenti:
ia/2
ia
ia/2
na/2
na/2
e
na/2
e
na/2
ia
n
= ( a Brl )ia = k T ia
2
2
na
na
e=
Brlω = ( Brl )ω = k E ω
2
2
T = n a Brl
(Nelle unità M.K.S. si ha kE=kT)
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
71
6.6 Equazioni del motore in CC
Equazioni di un motore DC a magneti permanenti:
•
Circuito di armatura:
•
dia (t )
+ ea (t )
dt
Equazione della forza elettromotrice ea(t):
va (t ) = Raia (t ) + L
(1)
(2)
ea (t ) = k Eω
•
Equazione della coppia:
Tm = kTia
(3)
Non esistendo sensori di coppia adatti, si controlla la coppia in modo indiretto misurando la
corrente ia (vedi controllo di coppia in corrente).
Equazioni di un motore CC con avvolgimento di eccitazione:
•
Circuito di armatura:
va (t ) = Raia (t ) + L
•
(4)
die (t )
dt
(5)
Circuito di eccitazione:
ve (t ) = Reie (t ) + Le
•
•
dia (t )
+ ea (t )
dt
Equazione della forza elettromotrice: essendo la corrente ie che regola il flusso di eccitazione
Φe, nel caso in cui non vi siano delle saturazioni, il flusso è dato da:
Φ e (t ) =
N eie (t )
R
(6)
dove R è la riluttanza magnetica.
Dato che kE = kT = k′ Φe, si può scrivere:
ea = k ′Φ eω = kieω
Università degli studi di Ferrara
(7)
Azionamenti Elettrici
Motori in C.C.
•
72
Equazione della coppia:
(8)
Tm = k ′Φ eia = kieia
Il controllo di coppia potrebbe essere fatto sia controllando ia, sia controllando ie ma in pratica il
controllo in ie non è conveniente perché ha delle costanti elettriche elevate e i tempi di risposta
sarebbero più elevati.
Descrizione delle variabili e dei parametri presenti nelle equazioni:
va(t)
Tensione di alimentazione del circuito di armatura fornita attraverso le spazzole AB.
ia(t)
Corrente di armatura.
e(t)
Tensione contro-elettromotrice che si viene a creare nel circuito di armatura in virtù
del fatto che le spire si muovono all’interno delle linee di flusso del campo magnetico
generato dal circuito di eccitazione.
Ra, La
Induttanza e resistenza delle spire del circuito di armatura.
Re, Le, Ne
Induttanza , resistenza delle spire del circuito di eccitazione e numero di avvolgimenti
delle spire del circuito di eccitazione.
Φe(t), ie(t)
Flusso magnetico e corrente relativi al circuito di statore (eccitazione).La corrente ed
il flusso sono legati fra di loro da una relazione statica non lineare del tipo ie = f( Φe).
In particolare la caratteristica della funzione f presenta una saturazione, in quanto il
flusso che può essere indotto nel circuito magnetico della corrente di eccitazione ie
non può superare un certo valore di saturazione che dipende dai parametri magnetici
del sistema.
Visto che kT (Nm/A) = kE (V/rad/sec), normalmente viene dato ea per ω = 1000rpm o, che è lo stesso,
kE in V/krpm, quindi occorre effettuare la conversione per determinare kT:
1000rpm = 104,72 rad
1
V
= 9,55 ∗ 10 −3
krpm
Università degli studi di Ferrara
sec
V
rad sec
Azionamenti Elettrici
Motori in C.C.
73
Esempio:
Un motore DC a MP ha una coppia a rotore bloccato T0 = 0.6Nm e una costante di tensione
kE = 13.5 V/krpm.
La costante di coppia è:
kT = 13,5 ∗ 9,55 ∗ 10− 3 = 0,129
V
rad sec
(Nm/A)
La corrente continua a rotore bloccato è:
I a0 =
T0
0,6
=
= 4,65 A
k T 0,129
Determinazione dei parametri di un motore DC a MP:
•
Facendo girare il rotore, tramite un altro motore, ad una velocità fissa, normalmente 1000 rpm e
misurando ai capi dell’avvolgimento di armatura non alimentato la tensione si rileva kE in
V/krpm e quindi kT .
•
Bloccando l’albero motore, ed alimentando il motore con una corrente costante ia, per vedere il
valore max di coppia che riesce ad erogare il motore in modo continuo senza che la temperatura
superi il valore massimo ammissibile, che dipenderà dai materiali magnetici utilizzati e dalla
classe di isolamento.
•
Fissata la temperatura max (85÷115°C), la temperatura si misura con una sonda calettata
sull’albero motore, ma è una misura poco precisa per la temperatura interna al rotore.
Il metodo migliore consiste nel sfruttare la variazione di resistenza dell’avvolgimento:
R(t) = R(t0) [1+α t0 (t- t0)]
In questo modo si rileva la temperatura sugli avvolgimenti e così si determina la coppia T0.
•
Tracciando l’andamento della temperatura in funzione del tempo determino la costante termica
che non è altro che la derivata di tale funzione nell’origine.
•
Inerzia rotorica.
•
La resistenza e la induttanza d’armatura si misurano abbastanza semplicemente.
Conclusione: si riesce a determinare il modello con sufficiente approssimazione.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
74
6.7 Interazioni fra il flusso di eccitazione ed il flusso di armatura
Se si utilizza l’avvolgimento di eccitazione per generare il flusso Φe, la coppia dipende oltre che
dalla ia anche dalla ie.
Se Φe e ia sono disaccoppiati, si può controllare la coppia con una sola delle due grandezze.
Esempio: due circuiti sono completamente accoppiati quando uno è interno all’altro.
Il flusso generato da ia si concatena perfettamente con il flusso di ie quindi variando il flusso di
armatura variamo il flusso di eccitazione (questo è quello che non vogliamo assolutamente).
Allora:
I due circuiti sono magneticamente disaccoppiati cioè la spira del circuito di armatura è
perpendicolare all’avvolgimento di eccitazione e una variazione del flusso di armatura o di
eccitazione non comporta una variazione del flusso concatenato con l’altro avvolgimento.
Il disaccoppiamento tra Φe e ia è intrinseco nella macchina: gli assi di simmetria dei flussi di
armatura e di eccitazione sono in quadratura.
Φ
e
N
S
Φ
reazione d’armatura
a
L’indipendenza è vera fino a quando non si hanno fenomeni di saturazione, in tal caso un aumento
della ia porta ad una complessiva diminuzione di Φe ,in quanto la reazione d’armatura porta ad un
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
75
rafforzamento da una parte dei poli ed all’indebolimento dell’altra, quindi se vi è saturazione non
c’è compensazione.
Nel caso in cui non ci siano problemi di saturazione il flusso concatenato entra da una parte ed esce
dall’altra quindi la somma è nulla.
Nel caso in cui ci possono essere problemi di saturazione. Se vado a considerare le variazioni del
flusso di eccitazione dovuto alla reazione d’indotto o reazione d’armatura abbiamo che quando Φe
entra si rafforza, mentre quando esce diminuisce e non si compensa.
Abbiamo due problemi:
1 Mi manda in saturazione una parte del magnete permanente.
2 Tende a smagnetizzare l’altra parte del magnete.
Il campo magnetico nella zona del traferro vicino al magnete permanente sarà per la reazione
d’armatura:
dove le spire d’armatura percorse da corrente creano una forza magnetomotrice che genera il flusso
d’indotto . Questa forza magnetomotrice sarà nulla al centro e avrà il valore massimo agli estremi,
in quanto ingloba tutti i conduttori, considerando il verso della corrente uscente, come in figura,
allora il campo magnetico prodotto ha andamento antiorario, quindi la f.m.m. sarà negativa a destra
della mezzeria e positiva a sinistra.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
76
Se si considera l’induzione all’interno dei magneti, data la caratteristica magnetica:
SMAGNETIZZAZIONE
Si vede come nella zona in cui si indebolisce il campo magnetico potrei avere smagnetizzazione.
La caratteristica dipende anche dalla temperatura: temperature molto elevate possono portare più
facilmente alla smagnetizzazione del magnete.
La reazione d’armatura può portare alla smagnetizzazione del polo nei punti di minore
concentrazione. Tale problema è minore se il magnete permanente ha μ ≈ μo, infatti il flusso della
reazione d’armatura tende a chiudersi sul circuito a minor riluttanza:
1. se μ > μo allora il flusso di reazione tende a richiudersi attraverso i magneti.
2. se μ = μo allora una buona parte del flusso si racchiude nel traferro.
Ci sono vari modi per ridurre tale problema:
1. Introdurre del ferro dolce sotto l’espansione polare: scarpa polare, per fornire al flusso
d’armatura una via di chiusura a bassa riluttanza.
scarpe polari
Se si introduce un materiale ferromagnetico ad elevata permeabilità ( μ >> μo ) avremo che il flusso
di armatura si racchiuderà attraverso queste scarpe polari (che costituiscono un circuito a minor
riluttanza) e non modificherà il flusso nel magnete permanente.
2. Introdurre degli avvolgimenti sotto il polo per introdurre un campo magnetico che compensi in
parte la reazione d’armatura.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
77
Data la diversa tipologia realizzativa dei circuiti di eccitazione e di armatura si ha:
τe =
Le
L
>> a = τ a
Re
Ra
dove: τe è la costante elettrica di eccitazione
τa è la costante elettrica di armatura
Il controllo di coppia è più rapido se realizzato tramite una regolazione della correte di ia.
(La correte ie viene controllata nel controllo di flusso).
Esempio:
Un motore CC con avvolgimento di eccitazione ha una potenza Pn=50kW, Re=30Ω, Le=15H,
Ra=0.1Ω, La=2mH:
τe =
15
= 0.5 sec
30
τa =
2 ∗ 10 −3
= 20m sec
0,1
quindi:
τe
= 25
τa
Il disaccoppiamento tra circuito d’armatura e circuito d’eccitazione viene a mancare se si spostano
le spazzole dall’asse neutro. Sono le spazzole che determinano il piano di inversione della corrente.
Supponiamo di spostare l’asse delle spazzole di un angolo α:
Il flusso Φa non coincide con l’asse neutro.
Possiamo suddividere Φa in due componenti:
Nell’esempio riportato si nota una componente di Φa che contrasta Φe, in tal modo un aumento di ia
porta ad un calo del flusso di eccitazione e non si ha più disaccoppiamento.
La coppia non è più lineare e ne deriva un ripple non trascurabile.
Il funzionamento ottimale prevede le spazzole sull’asse neutro in quanto la coppia, derivante
dall’interazione dei flussi Φa e Φe è massima con circuiti in quadratura (disaccoppiati).
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
78
6.8 Curva caratteristica di un motore in corrente continua
Facendo riferimento alle equazioni del motore in CC in regime stazionario, per cui con ω=cost,
tensione di armatura va=cost, corrente di armatura ia=cost e dia/dt=0, si ricava:
⎧va = Raia + k Eω
⎨
⎩Tm = kT ia
Risolvendo il sistema si ottiene:
(1)
k k
kT
va − T E ω
Ra
Ra
Tale equazione lega la coppia Tm fornita dal motore con la velocità ω in modo lineare. La curva
caratteristica è una retta con pendenza negativa:
Tm =
T
m
v
v
a 1
T
s
a 2
v
a
ω
•
•
0
ω
per ω=0 si ha la coppia di spunto:
k
Tm = E va =T S
Ra
per Tm=0 si ha la massima velocità a vuoto del motore:
ω0 =
(2)
va
kE
(3)
Considerando il carico semplice l’equazione meccanica relativa sarà:
Tc = J
dω
+T r
dt
(4)
da cui segue:
dω
= Tc −T r
dt
quindi se ω=cost, la derivata si annulla e si ottiene:
J
Tc = Tr
Poiché all’equilibrio deve essere Tm=Tc ricaviamo:
Tm = Tr
Università degli studi di Ferrara
(5)
Azionamenti Elettrici
Motori in C.C.
79
Consideriamo il grafico:
T
m
v
v
a 2
a 1
T
T
r2
b
a
r1
ω
•
b
ω
a
ω
supponiamo che la retta di carico sia Tr1 e la tensione di armatura va1, essendo Tm=Ts>Tr1
(condizione iniziale del motore con ω=0), il rotore inizierà a girare, di conseguenza, ea aumenta,
ia diminuisce e quindi anche Tm diminuisce come si può vedere dalle seguenti relazioni:
J
poiché (Tm − Tr ) > 0 ⇒
dω
= Tm −T r
dt
dω
> 0 dunque ω ↑
dt
va − k Eω
allora ia ↓ ed essendo Tm = kT ia anche la coppia motrice
Ra
segue lo stesso andamento di ia e diminuisce. Questo fino a quando sarà: Tm = Tr1 nel
punto a e ωa diventa la velocità del motore a regime.
essendo
ia =
•
se la coppia di carico aumenta e diventa Tr2 avremo Tm<Tr2, quindi il rotore rallenta, perciò
diminuisce ea ed aumenta ia; di conseguenza aumenta anche la coppia Tm (analogamente a
quanto visto prima), fino a che si ristabilisce l’equilibrio Tm=Tr2 nl punto b e ωb è la nuova
velocità del motore.
I punti a e b sono i punti di lavoro dati dall’intersezione tra la caratteristica meccanica e la coppia
resistente.
Come si può notare, la velocità è cambiata, ma se kE è elevato, la retta caratteristica ha pendenza
elevata, quindi ωb è vicino a ωa, ossia le variazioni di velocità dovute a variazioni di carico sono
limitate (retroazione negativa intrinseca).
Se si vuole mantenere costante la velocità occorre modificare va.
Per ω=0 la corrente di spunto IaS sarebbe elevatissima, non limitata da nessuna forza
controelettromotrice:
v − k Eω va
I aS = a
=
≈ 10 ÷ 20 I n
Ra
Ra
Questo è pericoloso perché comporta:
• sollecitazioni elettrodinamiche elevatissime: avvolgimenti percorsi da correnti molto elevate,
posti a distanza ravvicinata, subiscono l’azione di una forza repulsiva che li danneggia.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
80
• problemi di commutazione dovuti al fatto che il collettore non è dimensionato per queste
correnti, che causano un eccessivo riscaldamento del rotore e conseguente deterioramento
dell’isolante e dell’avvolgimento stesso.
T
m
T
s
ω
0
ω
Come si vede da grafico la coppia di spunto TS è in realtà limitata da problemi di saturazione (il
flusso, infatti, non cresce in modo lineare).
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
81
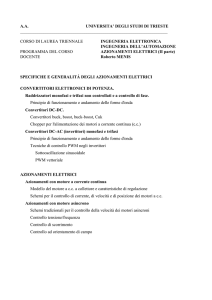
6.9 Servomotori a magneti permanenti
Il rendimento dei motori in corrente continua a magneti permanenti dipende anche dal materiale
usato per i magneti permanenti stessi. Prendiamo in considerazione:
• ferriti: il rapporto coppia erogata/peso del motore è di circa 0,5 Nm/Kg
• terre rare: il rapporto coppia erogata/peso del motore è di circa 0,7 Nm/Kg
Il rapporto fra le coppie risulta però essere diverso rispetto al rapporto fra le induzioni (ovvero
meno marcato).
Bm(T)
rre
Te
e
rar
r
fe
r it
e
Hm(kA/m)
Questo si può capire andando a vedere il dimensionamento del circuito magnetico del rotore.
Sm
Sd
Sm: superficie del dente esposta al flusso, al traferro
Sd: sezione minima del dente
Sia Bm l’induzione magnetica al traferro prodotta dal magnete, la parte di flusso di eccitazione che
attraversa il singolo dente è:
ΔΦ me = S m Bm
dal momento che il dente fornisce il percorso magnetico, il flusso sarà in esso costante (continuità
del flusso) e l’induzione magnetica varierà in funzione della sezione, analogamente alla pressione di
un fluido comprimibile fluente in una condotta a sezione variabile. Si ottiene quindi:
S d Br = ΔΦ me
dove Br è l’induzione nel materiale ferromagnetico del rotore al restringimento del dente.
Nell’intenzione di evitare la saturazione del materiale ferromagnetico costituente il rotore (che
significa perdere la linearità tra induzione e flusso magnetico ed un aumento notevole delle perdite
nel ferro), si dimensionerà la sezione minima del dente in modo che l’induzione Br non superi un
valore massimo prefissato, in base al materiale usato:
Br
B rmax
H
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
82
La sezione minima di restringimento del dente dovrà quindi essere:
S B
S d= m m
Br max
da cui si deduce che la sezione minima del dente sarà tanto maggiore quanto più Bm è grande (visto
che Sm e Brmax di solito sono fissate dalla dimensione del motore e dal tipo di materiale
ferromagnetico del rotore). Le ferriti producono una induzione magnetica Bm minore rispetto alle
terre rare per cui la dimensione del dente sarà minore e resterà più spazio nella cava per gli
avvolgimenti. Ricordando che:
T = k I Φe Ia
si capisce perché i rapporti tra le coppie e le induzioni siano diversi: nei motori con magneti
permanenti di ferrite sarà possibile andare ad aumentare la coppia attraverso la corrente Ia: ciò può
essere fatto a parità di potenza dissipata nel rame dal momento che, essendo maggiore lo spazio
nella cava per i conduttori, si potrà maggiorarne la sezione. Ovviamente il prezzo da pagare è quello
di dover adeguare il driver del motore sovradimensionandone la parte di potenza (Ia ↑).
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
83
7 Controllo di macchina
7.1 CONTROLLO IN CASCATA
ωSP
CONTROLLO DI
AZIONAMENTO
TSP
CONTROLLO
DI MACCHINA
MACCHINA
TM
CARICO
ω
TM
ωM
Il controllo di macchina ha una dinamica molto più elevata rispetto al controllo di azionamento e
quindi, finora, è sempre stato trascurato oppure considerato come un blocco unitario o un blocco
saturatore:
TSP
1
TM
TSP
TM
CONTROLLO IN TENSIONE E IN CORRENTE
Nel caso del motore in CC sappiamo che per il circuito d’armatura:
v a (t ) = R a i a + L a
di a
+ ea
dt
(1)
che trasformando secondo Laplace diventa:
V a ( s ) = R a I a ( s ) + sL a I a ( s ) + E a ( s )
(2)
dove:
ea = kEω
Ea (s) = kEω(s)
per cui :
Va (s) − Ea (s) Va (s) − k E ω(s)
=
Ra + sLa
Ra + sLa
Sappiamo inoltre che la coppia motrice è:
I a ( s) =
Tm = J
Tm = kT Ia (s)
dω
+ Tr
dt
(3)
(4)
che trasformando secondo Laplace diventa:
T m = Js ω ( s ) + T r ( s )
(5)
da cui :
ω (s) =
Università degli studi di Ferrara
Tm − Tr k T I a ( s) − Tr
=
Js
Js
(6)
Azionamenti Elettrici
Motori in C.C.
84
Dalle (3),(6) ricavo lo schema a blocchi della funzione di trasferimento del motore in CC :
Va(s)
Ia(s)
1
Ra + sLa
-Tr(s)
Tm
kT
ω(s)
1
Js
-Ea(s)
kE
Si può pensare di variare la velocità angolare ω controllando la tensione di alimentazione. Il
pericolo è che nel caso di un cambio repentino del set-point di velocità, la corrente cresca troppo
rapidamente superando il valore massimo accettabile dal motore .E’ quindi necessario limitare il
valore della Ia ed evitare un surriscaldamento eccessivo dell’avvolgimento con conseguente
deterioramento.
A partire da:
v a (t ) = R a ia + L a
di a
+ k Eω
dt
(1)
ricavo:
di a
v (t ) − R a i a − k E ω
= a
dt
La
(7)
Le variazioni di velocità (kEω) sono abbastanza lente rispetto alle variazioni di ia, dato che le
costanti di tempo meccaniche sono notevolmente più grandi di quelle elettriche. Quindi se il setpoint di velocità è molto maggiore rispetto alla velocità del motore
ia
avrò una tensione va elevata, quindi se mi trovo a velocità ω basse
avrò dia/dt>>1 in quanto: Raia è trascurabile, La è piccolo e kEω<<1.
ia MA X
t
La ia cresce molto rapidamente senza che la velocità del motore
possa variare. E’ quindi improponibile un controllo in tensione e si
preferisce un controllo in corrente.
Schema a blocchi del controllo corrente:
IaSP(s)
va(s)
-Ia(s)
P
-Ea(s)
1
Ra
τ as +1
Ia(s)
kT
Tm
1
Js
kE
Università degli studi di Ferrara
Azionamenti Elettrici
ω(s)
Motori in C.C.
85
Lo schema può essere modificato:
IaSP(s)
va(s)
P
-Ia(s)
-Ea(s)
1
Ra
τ as +1
Ia(s)
Tm
kT
1
Js
ω(s)
kT kE
Js
Essendo J molto grande posso considerare il blocco in retroazione che la contiene, naturalmente alle
alte frequenze, quelle che caratterizzano l’elevata dinamica del controllo (s elevati) come un
disturbo da controllare per mezzo del controllore PI, che viene compensato dal termine integrale
perché costante alle elevate dinamiche di controllo della corrente. Otteniamo il LOOP DI
CORRENTE:
IaSP(s)
Kps+Ki
va(s)
s
-Ia(s)
1
Ra
τ as +1
Ia(s)
Calcoliamo la f.d.t. in catena aperta:
kI (
kI
kP
1
s + 1)
R
Ra
kI
= a = G OL ( s )
τ as +1
s
s
OL: open loop
(8)
dove lo zero del controllore PI è stato scelto in modo tale da compensare il polo dell’avvolgimento:
kI
1
=
kP
τa
|GOL(s)|
kI/Ra
GOL(s)
-π/2
Università degli studi di Ferrara
In questo modo si ottiene un
sistema del 1° del primo ordine,
quindi sempre stabile. KI/Ra
rappresenta la banda passante del
sistema; regolando il guadagno
integrale si può quindi far variare
la banda. Il caso considerato è
però ideale, la tensione di
alimentazione Va è limitata dal
valore massimo che il convertitore
di potenza riesce a fornire.
Azionamenti Elettrici
Motori in C.C.
86
LOOP DI CORRENTE CON SATURATORE:
Kps+kI
s
-Ia(s)
IaSP(s)
vaLIM(s)
va(s)
1
Ra
τ as +1
Ia(s)
Filtro
Nello schema a blocchi del loop di corrente è stato introdotto il blocco saturatore, ma occorre
introdurre anche un filtro sulla misura della corrente, dato che esiste un ripple dovuto alla frequenza
di commutazione dell’amplificatore di potenza che alimenta il motore.
CONTROLLO DI FLUSSO
TSP
ΦSP
T
In realtà noi controlliamo la corrente per effettuare un controllo di coppia. Nel caso in cui si possa
controllare anche il flusso, si ha un secondo ingresso: ΦSP. Il blocco che finora è stato considerato
come un blocco unitario o un blocco saturatore:
TSP
1
TSP
TM
TM
In realtà diventa:
TSP
–1
IaSP
kT (Φe)
Ia
Controllo
di corrente
Tm
kT (Φe)
Il blocco kT-1(Φe) è importante per gli azionamenti di tipo mandrino nel momento in cui andiamo ad
effettuare il deflussaggio. Infatti, se il flusso varia, anche kT varia proporzionalmente ed è quindi
necessario andare a compensare tale variazione.
Nel caso di motori in CC a magneti permanenti kT è ovviamente costante.
Per determinare kT o il flusso devo farne una stima. I metodi comunemente utilizzati sono due:
•
utilizzo la f.e.m.:
e = k E (Φ e )ω = kT (Φ e )ω
Università degli studi di Ferrara
(9)
Azionamenti Elettrici
Motori in C.C.
87
Considerando poi l’equazione dell’avvolgimento di armatura:
va = Raia + La
dia
+ kT (Φ e )ω
dt
da cui ricavo:
kT (Φ e ) =
va − Raia − La
ω
dia
dt
(10)
dove tutte le grandezze sono misurabili.
•
Utilizzo la caratteristica di Φe in funzione di ie:
Φe
Φ e = Φ e (ie )
Conoscendo ie posso determinare
il valore di Φe.
ie
Il metodo è abbastanza semplice e non tiene conto né della reazione d’indotto ,né delle correnti
parassite. Dal momento che i motori in CC non sono motori molto precisi il metodo è comunque
accettabile.
Per quanto riguarda il controllo di flusso dalla relazione del circuito d’eccitazione abbiamo:
ve = Reie + Le
die
dt
che trasformando secondo Laplace diventa:
I e ( s)
1
=
Ve ( s ) Re + sLe
(11)
da cui posso ricavare lo schema a blocchi del controllo di flusso:
ΦSP
veLIM(s)
ve(s)
~
Φ
PI
1
R e + sL e
Ie(s)
Φe
ie
modello
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
88
SCHEMA COMPLESSIVO DEL CONTROLLO DI MACCHINA DEL MOTORE IN CC
TSP
kT –1(Φe)
iaSP
CONTROLLO
DI ia
Sensore
di
velocità
va
iam
~
Φ
MOTORE
IN CC
CONTROLLO
DI FLUSSO
ΦSP
ve
ie
ωm
Il blocco che determina ΦSP dalla velocità ωm è indipendente dal controllo di coppia ma dipende
dalla tensione massima di alimentazione e dalle caratteristiche del motore. Infatti trascurando la
caduta di tensione dovuta all’induttanza d’armatura:
v − k Eω
(12)
ia ≅ a
Ra
dove la f.c.e.m. (keω) all’aumentare
della velocità cresce fino a raggiungere
un valore limite ( v aMAX = k E ω ) in cui ia
risulterebbe nulla e così pure la coppia.
Quindi occorre limitare la f.c.e.m. per evitare di annullare la coppia, normalmente si divide il
funzionamento del motore in due parti, definite dalla velocità ω.
Basterà quindi porre:
•
per 0 ≤ ω ≤ ωb
ea = k Eω = kT ω
T = kT ia
(con iaMAX si avrà TMAX)
Il valore limite della f.e.m., che dovrà essere sufficientemente minore rispetto alla vaMAX è quindi:
e LIM = k Eωb
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
89
cioè fissando ωb si fissa il valore limite accettabile della f.c.e.m.
•
per ω > ω b
la f.e.m. dovrà essere costante e pari a eLIM per cui:
kE =
e LIM
ω
Questo è possibile solo nei motori in CC dove kE dipende dal flusso Φe ed è quindi modificabile
variando il flusso stesso.
Per un generico circuito magnetico in cui non ho problemi di saturazione si ha che:
kE = k I Φe → Φe =
e LIM
k Iω
Quindi kE e il flusso Φe devono essere diminuiti in modo inversamente proporzionale alla velocita
ω. Per quando riguarda la coppia, essendo kE=kT, si ha che:
T MAX ∝
iaMAX
ω
In corrispondenza di ωb la coppia inizia a decrescere ma rimanendo la f.e.m. costante non si è
costretti a sovradimensionare la parte di potenza. Il set-point di flusso e il valore di ωb dipenderanno
dalle caratteristiche della macchina.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
90
7.2 Predizione della coppia motrice
Il controllo di macchina consiste in un controllo della coppia motrice. Essendo i sensori di coppia
molto costosi e a bassa banda passante, si realizza un controllo indiretto della coppia tramite una
misura di corrente o di tensione Per questo è necessario determinare un modello che leghi il valore
della coppia in funzione delle grandezze che possiamo misurare.
I metodi per la determinazione del modello della coppia sono basati:
1. sulla determinazione della distribuzione del campo magnetico in funzione della struttura del
motore (in fase di progettazione)
2. sul bilancio energetico (quando la macchina è già costruita)
3. sui modelli a parametri concentrati
Considerando il secondo caso:
SISTEMA
ELETTRICO
CAMPO
MAGNETICO DI
ACCOPPIAMENTO
SISTEMA
MECCANICO
Il sistema elettrico assorbe energia elettrica dall’esterno e il sistema meccanico si interfaccia con la
macchina fornendo energia meccanica.
Se supponiamo trascurabili gli scambi energetici attraverso radiazioni elettromagnetiche, per il
principio di conservazione dell’energia avremo:
(1)
dW el = dQ + dW magn + dW mec
dove dWel è la variazione infinitesima di energia elettrica, considerata positiva quando entra nel
sistema e negativa quando esce; dQ è il calore dissipato per effetto Joule, per le correnti parassite
(di Foucault) e per isteresi; dWmagn è la variazione infinitesima di energia magnetica e, infine,
dWmec corrisponde alla variazione infinitesima di energia meccanica, considerata positiva quando
esce dal sistema e negativa quando entra. La dissipazione dovuta agli attriti meccanici, poiché
esterni al nostro sistema, non viene presa in considerazione.
Valutiamo singolarmente ogni termine della (1).
Dato un avvolgimento del tipo:
v = Ri +
i
v
dλ
dt
dove λ rappresenta
magnetico
(2)
il
flusso
La potenza dissipata risulta:
P = vi = Ri
2
+
dλ
i
dt
(3)
da cui segue che la variazione di energia elettrica (facendo riferimento ad un solo avvolgimento) è:
dW el = Pdt = Ri 2 dt + id λ
Università degli studi di Ferrara
(4)
Azionamenti Elettrici
Motori in C.C.
91
Dato che il termine Ri2dt rappresenta l’energia dissipata sotto forma di calore đQ (si trascura quella
dispersa nel ferro), si ha:
(5)
dWel = dQ + idλ
Per il calcolo dell’energia meccanica facciamo riferimento ad un motore di tipo rotativo:
P = Tω = T
dθ
dt
dWmecc = Pdt = Tdθ
(6)
Sostituendo (5) e (6) nell’equazione del bilancio energetico (1):
dWmagn = idλ − Tdθ
dQ+ idλ = dQ+ dWmagn +Tdθ
(7)
L’energia magnetica in un generico circuito è funzione non lineare del flusso e dell’angolo di
rotazione
Wmagn = Wmagn (λ , θ )
Calcolando il differenziale:
dWmagn =
∂Wmagn
∂λ
dλ +
∂Wmagn
∂θ
dθ
(8)
Uguagliando (7) e (8) ottengo la coppia (λ=costante):
T =−
∂Wmagn(λ,θ)
(9)
∂θ
L’energia magnetica si può calcolare come:
λ
Wmagn (λ , θ ) = ∫ i (λ , θ ) dλ
(10)
0
Risolvendo tale integrale riusciremmo a trovare Wmagn e quindi anche T. In genere, però, non si
conosce i=i(λ) ma λ=λ(i). Graficamente:
λ
Tale curva rappresenta la relazione
non lineare tra corrente e flusso. La
non linearità dipende dai fenomeni di
isteresi e saturazione.
En. Magnetica
Wmagn
i
Coenergia WImagn
Dato che λ=λ(i) è noto possiamo calcolare la coenergia anziché l’energia magnetica:
I
W magn
(i, θ ) =
∫
i
0
λ ( i , θ ) di
(11)
In generale:
I
W magn + W magn
= λi
Università degli studi di Ferrara
(12)
Azionamenti Elettrici
Motori in C.C.
92
e se la relazione flusso/corrente è lineare vale:
W
En. Magnetica
Wmagn
magn
= W
I
magn
=
1
λi
2
Coenergia WImagn
Poiché λ=Li dove L è l’induttanza si ha (sempre considerando il caso lineare):
W magn =
1 2
Li
2
che corrisponde all’energia magnetica immagazzinata in un induttore.
Tornando al caso generale (non lineare) dall’equazione (12) ricavo:
I
W
magn
= λ i − W magn
(13)
e facendone il differenziale:
dW
I
= id λ + λ di − dW magn
magn
dWI magn = idλ + λdi − (idλ −Tdθ)
dW
I
magn
= λ di + Td θ
(14)
Dato che la coenergia è in funzione di θ e i :
I
I
W magn
= W magn
(θ , i )
il differenziale si può scrivere come:
dW
I
magn
=
I
∂Wmagn
∂θ
dθ +
I
∂Wmagn
∂i
di
(15)
Uguagliando (14) e (15) ottengo l’espressione della coppia:
T=
I
(i,θ )
∂Wmagn
(16)
∂θ
Questa volta l’espressione della coppia fa riferimento a grandezze misurabili (i,θ), quindi la
possiamo calcolare facilmente.
Università degli studi di Ferrara
Azionamenti Elettrici
Motori in C.C.
93
Determiniamo ora l’espressione generica della coppia motrice generata da un avvolgimento,
supponiamo che il flusso concatenato con l’avvolgimento sia esprimibile con:
λ = L(θ , i ) i + λm (θ )
(17)
Dove L è la l’induttanza dell’avvolgimento considerato, funzione non lineare di i e θ, e λm è il
flusso magnetico concatenato con l’avvolgimento, che può essere prodotto da magneti permanenti o
da altri avvolgimenti, e dipende dalla posizione assunta dall’avvolgimento.
Per semplificare la trattazione, supponiamo di non avere problemi di saturazione magnetica, ipotesi
valida con buona approssimazione, allora il flusso può essere espresso:
Cioè L non varia al variare dell’intensità del campo magnetico.
(18)
λ = L(θ ) i + λm (θ )
Calcoliamo la coppia tramite la (16), sostituendo l’espressione della coenergia W’magn (11):
T=
I
(i,θ )
∂Wmagn
∂θ
i ∂ ( L (θ )i + λ (θ ))
∂λ (i,θ )
m
di = ∫
di =
0
0
∂θ
∂θ
=∫
i
∂L(θ ) i 2 ∂λ m (θ )
+
i
∂θ 2
∂θ
La coppia risulta quindi composta da due termini:
•
il secondo termine dipende dalle variazioni del flusso concatenato con l’avvolgimento. Per i
motori a riluttanza variabile questo termine è nullo e si definiscono anisotropi.
•
Il primo termine è proporzionale alla variazione dell’induttanza ed al quadrato della i, ne segue
che la coppia creata da questo termine non dipende dal segno della corrente. I motori in cui
questo termine è nullo (quindi hanno riluttanza fissa) sono detti isotropi, purtroppo non sono
mai perfettamente isotropi (cogging), quindi hanno un contributo di coppia dovuto anche a
questo termine, contributo indesiderato che crea ripple di coppia.
Se vi sono entrambi i termini il motore si dice ibrido. Questi motori presentano lo svantaggio di un
ripple elevato e sono quindi difficili da controllare.
Università degli studi di Ferrara
Azionamenti Elettrici