Capitolo 10
I convertitori per azionamenti
10.1 Convertitori CA-CC
Nella maggior parte delle applicazioni elettriche, l'energia viene fornita sotto forma di tensione
alternata sinusoidale a 50 o 60 Hz di valore ecace costante. Tale ingresso per poter essere
utilizzato negli azionamenti elettrici deve essere spesso convertito in una sorgente continua di
tensione o corrente regolabile.
Nel primo caso la conversione avviene nella maggior parte delle applicazioni mediante ponti
raddrizzatori a diodi non controllati ed, anché la tensione in uscita dal raddrizzatore presenti la
minor oscillazione possibile, viene tipicamente connesso al lato in corrente continua, come ltro,
un condensatore di capacità di valore elevato, in modo da limitare le ondulazioni di tensione.
Tale soluzione presenta il vantaggio di un costo estremamente contenuto soprattutto se il raddrizzatore è direttamente connesso alla linea di alimentazione senza la presenza di un trasformatore
in ingresso, ma ha lo svantaggio di presentare una elevata distorsione delle correnti assorbite.
Nel secondo caso è necessario ricorrere a ponti controllati dotati in uscita di un induttore di
induttanza elevata, in modo da limitare le ondulazioni di corrente. Tale soluzione presenta costi
più elevati, ma presenta caratteristiche favorevoli per l'uso in azionamenti di potenza limite.
10.2
Raddrizzatori elementari non controllati
Per introdurre i principi della conversione CA-CC con diodi non controllati saranno analizzati
alcuni semplici convertitori atti evidenziare le caratteristiche di funzionamento intrinseche di tali
convertitori.
10.2.1
Convertitore monofase a semplice semionda
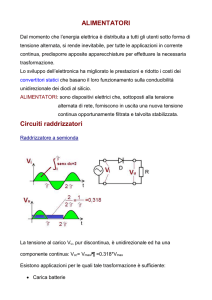
Il circuito monofase a semplice semionda è costituito da una sola valvola a conduzione unidirezionale posta in serie ad un generico carico, si veda Figura 10.1a, mentre la sorgente di potenza è una
tensione alternata sinusoidale a frequenza e valore ecace costanti. Tale congurazione circuitale
ha un limitato interesse pratico, tuttavia il suo studio mette il luce una serie di peculiarità tipiche
dei circuiti a diodi.
Nel caso di carico puramente resistivo le forme d'onda sono quelle rappresentate in Figura
10.1b. Si può infatti evidenziare che il diodo risulti polarizzato positivamente ed entri quindi in
conduzione ogni semiperiodo positivo della tensione della sorgente vs (t). La corrente circolante
nel carico i(t) = vc (t)/R presenta naturalmente il medesimo andamento della tensione applicata.
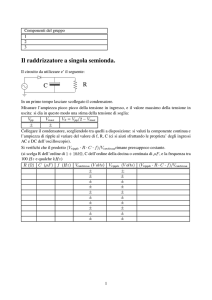
Si consideri ora il circuito rappresentato in Figura 10.2 in cui il carico è ohmico-induttivo.
All'istante t = 0, il diodo si polarizza direttamente e comincia a condurre. La corrente nel circuito
è governata dall'equazione dierenziale (10.1).
190
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
(a) Il convertitore elementare
191
(b) Forme d'onda di tensione e corrente
Figura 10.1: Il convertitore a semplice semionda con carico resistivo
di
(10.1)
dt
Fino a quando la tensione vs della sorgente è maggiore della tensione sulla resistenza vR la
corrente cresce e l'induttore accumula energia. Quando la tensione sulla resistenza supera la
tensione di alimentazione (istante t1 ) la tensione sull'induttanza diventa negativa e quindi la
corrente comincia a diminuire nché si annulla all'istante t2 ; in questo istante il diodo entra in
stato di blocco (Figura 10.2b).
L'istante di tempo t2 , al quale il diodo smette di condurre, può essere ottenuto dall'equazione
dell'induttore riscritta separando le variabili dt e di come indicato in (10.2).
vs = Ri + L
1
vL dt = di
(10.2)
L
Integrando tra 0 e t2 e riconoscendo che i(0) = i(t2 ) = 0 si ottiene l'equazione (10.3) che può
essere interpretata come indicato in (10.4): la corrente si annulla quando le due aree A e B, sottese
dalla curva che individua l'andamento della tensione sull'induttore vL , sono uguali.
1
L
Z
Z
t2
vL dt =
0
Z
i(t2 )
di = 0 →
i(0)
Z
t2
vL dt =
0
Z
t1
t2
vL dt +
0
vL dt = 0
t1
Area A − Area B = 0
(10.3)
(10.4)
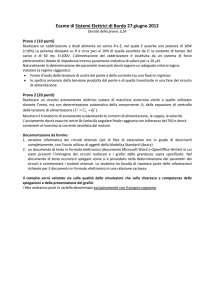
Il medesimo discorso si può eettuare nel caso in cui il carico sia costituito da un induttre di
induttanza L e da un generatore di tensione costante Ed (Figura 10.3a). In questo caso il diodo
inizierà a condurre quando la tensione di alimentazione vs sarà maggiore della tensione Ed (Figura
10.3).
Come si può notare, in tutti questi casi sia la tensione del carico vc che la corrente i presentano
un valore medio diverso da zero. Tale valore medio compare anche nella corrente erogata dal
generatore. Ora, se l'alimentazione provenisse, come spesso accade, da un trasformatore, tale
componente continua potrebbe portare in saturazione il nucleo del trasformatore, compromettendo
il buon funzionamento del sistema. E' per questa ragione che il raddrizzatore monofase a semplice
semionda non è normalmente usato.
10.3 Raddrizzatore monofase a ponte non controllato
La struttura tipica del raddrizzatore a ponte monofase utilizzato negli azionamenti elettrici è
rappresentata in Figura 10.4. Si può notare la presenza di un condensatore di elevata capacità
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.2: Il convertitore a semplice semionda con carico ohmico-induttivo
192
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.3: Il convertitore a semplice semionda con carico attivo
193
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
194
Figura 10.4: Raddrizzatore monofase a ponte non controllato
Figura 10.5: Raddrizzatore a ponte con Ls = 0 e carico resistivo
lato corrente continua, mentre la sorgente di potenza, in generale, può essere modellata come una
sorgente ideale di tensione sinusoidale vs con un impedenza serie costituita da un solo induttore
di induttanza Ls . Tale induttore rappresenta un modello semplicato della linea, dell'eventuale
trasformatore di alimentazione e dell'induttore di ltro. Vengono nel seguito esaminati alcuni
esempi di funzionamento del raddrizzatore a ponte che consentono un approccio intuitivo allo
studio. In tutti i casi presentati le valvole saranno considerate ideali.
10.3.1 Funzionamento con Ls = 0 e carico resitivo
Un primo approccio allo studio del funzionamento del raddrizzatore si può ottenere considerando
il circuito di Figura 10.5: il carico è esclusivamente resistivo (Cf = 0) e l'induttanza Ls di ingresso
è trascurabile.
Nella congurazione proposta saranno in conduzione il diodo superiore che si trova con il
potenziale anodico maggiore e il diodo inferiore a potenziale catodico minore (si veda Figura 10.6
in cui i diodi in conduzione sono rappresentati da un corto circuito, mentre quelli in stato di
blocco come circuiti aperti). Gli andamenti delle grandezze tensione e corrente sono rappresentati
in Figura 10.7.
Il valore medio della tensione sul carico si ottiene integrando l'andamento della tensione vs in
un semiperiodo come indicato in (10.5)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
(a) Semionda positiva
(b) Semionda negativa
Figura 10.6: Schema di conduzione delle valole durante un periodo di vs
Figura 10.7: Andamenti di tensione e corrente per Ls = 0 e carico resistivo
195
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
196
Figura 10.8: Raddrizzatore con corrente costante lato continua
Figura 10.9: Andamenti di tensione e corrente nel carico con corrente costante lato continua
Vd0
10.3.2
1
=
T /2
Z
0
T /2
√
√
2 2
Vs ≈ 0.9Vs
2Vs sin ωt di =
π
(10.5)
Funzionamento con corrente lato continua costante
Si consideri il circuito rappresentato in Figura 10.8 in cui il carico può essere rappresentato da
un generatore di corrente costante (è il caso di carichi ohmico-induttivi ad elevata costante di
tempo). Come già visto per il caso di carico resistivo, tra i diodi a catodo comune conduce quello
con potenziale anodico maggiore e, viceversa, per i diodi ad anodo comune. Gli andamenti delle
grandezze tensione e corrente sono rappresentati in Figura 10.9 e Figura 10.10.
10.3.3
Funzionamento con corrente, lato continua, costante e induttanza di linea Ls 6= 0
La presenza di una induttanza di linea LS 6= 0 non permette che la corrente is possa assumere
l'andamento a gradino di Figura 10.10. Infatti se nel circuito la corrente variasse a gradino, su
Ls si manifesterebbe un impulso di tensione e non sarebbe soddisfatta la legge di Kirchho delle
tensioni in una qualsiasi maglia comprendente Ls e vs , in quanto il generatore di tensione ha valore
nito.
Si supponga ora che il diodo D1 e D6 siano in conduzione e si voglia studiare il fenomeno della
commutazione che porta in conduzione i diodi D3 e D4; si faccia l'ipotesi che il tempo in cui avvenga
la commutazione sia inferiore al semiperiodo della sorgente dell'alimentazione. Sotto queste ipotesi
la rete è a regime prima che cominci il fenomeno della commutazione e quindi l'induttore Ls si
comporta come un corto circuito (è percorsa da corrente costante). Si scelga come origine dei
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
197
Figura 10.10: Andamenti di tensione e corrente di linea con corrente costante lato continua
Figura 10.11: Raddrizzatore a ponte con corrente lato continua costante e Ls 6= 0
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
198
Figura 10.12: Convenzioni di misura durante la fase di commutazione
Figura 10.13: Andamento delle correnti nei diodi e nella linea durante la commutazione
tempi l'istante in cui la tensione vs cambia segno, passando da positiva a negativa, per cui si avrà
vs (t) > 0 per t < 0 e vs (t) < 0 per t > 0. La maglia comprendente il generatore vs e l'induttanza
Ls è governata dall'equazione (10.6).
dis
per t > 0
(10.6)
dt
La presenza dell'induttore implica infatti la continuita della corrente is (is (0− ) = is (0+ ) = Id ),
ma non della sua derivata. Si dimostra che l'unica condizione che rispetti le leggi di Kirchho sarà
che entrino in conduzione i diodi D3 e D4 e vAB (t) = 0 per tutta la durata della commutazione.
Si supponga infatti che per dt > 0, vAB (dt) = vs (dt)−Ls dis /dt > 0 e cioè Ls dis /dt < vs (dt) < 0
o meglio dis < 0 (per l'ipotesi sul segno di vs (t) per t > 0). Se fosse vera questa ipotesi, D1 e D6
rimarrebbero in conduzione e D3, D4 in stato di blocco (il diodo D1 è il diodo a potenziale anodico
maggiore e, dualmente, D6 a potenziale catodico minore). Tale situazione non è compatibile con
la legge di Kirchho al nodo P dato che al tempo dt si avrebbe is (dt) = Id + dis < Id (dis < 0).
Se viceversa vAB (dt) < 0 entrerebbero in conduzione D3 e D4. Poichè la corrente is non può
avere discontinuità per la presenza dell'induttore D1 e D6 devono rimanere in conduzione (cosa
vAB (t) = vs (t) − Ls
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
199
che viceversa accadrebbe se D1 e D6 si spegnessero), ma in questo modo non è soddisfatta la legge
di Kirchho delle tensioni alla maglia vS , Ls , D1, D3 (implicherebbe una tensione diversa da 0 ai
capi di un corto circuito)
La condizione vAB (dt) = 0 con i quattro diodi in conduzione per tutta la durata del transitorio
di commutazione è quindi l'unica compatibile con le leggi di Kirchho. L'equazione che governa
il transitorio di commutazione è riportata in (10.7). La soluzione dell'equazione dierenziale si
ottiene per integrazione di (10.7) imponendo la condizione iniziale is (0) = Id (l'origine dei tempi
è ssata all'istante di inversione della tensione vs ) ed è indicata in (10.8).
.
VsM sin ωt − Ls
is (t) = Id −
dis
=0
dt
VsM
(1 − cos ωt) = Id − ∆id (t)
ωLs
(10.7)
(10.8)
Le correnti nei diodi sono calcolabili utilizzando le leggi di Kirchho ai nodi P, N (10.10) ed
i legami (10.9), validi per ragioni di simmetria (si faccia riferimento alle convenzioni di misura
in Figura 10.12). Le soluzioni del sistema di equazioni (10.9)-(10.10) sono riportate in (10.11).
L'andamento qualitativo delle correnti nei diodi e in linea durante la commutazione è rappresentato
in Figura 10.13.
iD1 = iD6
iD3 = iD4
Id − iD1 − iD3 = 0
Id − iD4 − iD6 = 0
(10.9)
(10.10)
∆id (t)
∆id (t)
iD3 = iD4 =
(10.11)
2
2
Il tempo di commutazione tc si può calcolare come indicato in (10.12) (la commutazione termina
quando la corrente is ha raggiunto il valore −Id ).
µ
¶
VsM
1
2Id ωLs
is (tc ) = −Id = Id −
(1 − cos ωtc )
tc = arccos 1 −
(10.12)
ωLs
ω
VsM
iD1 = iD6 = Id −
10.3.4
Funzionamento con tensione, lato continua, costante
Si consideri il circuito rappresentato in Figura 10.14 che può essere considerato come una prima
approssimazione del circuito di Figura 10.4 in presenza di un condensatore di capacità C di valore
molto elevato. In questo caso le forme d'onda sono rappresentate in Figura 10.15 dove si è fatta
l'ulteriore ipotesi che la corrente del carico sia nulla quando la tensione del generatore vs passa
per lo 0 (dicontinuous conduction mode - conduzione discontinua).
In questo caso, quando la tensione vs supera la tensione Vd (tempo t1 ) il diodo entra in
conduzione. Il raggiungimento del picco di corrente avviene al tempo t2 quando la tensione vs
eguaglia nuovamente la tensione Vd . Dopo t2 la tensione sull'induttore Ls diventa negativa e la
corrente inizia a diminuire nché si annulla al tempo t3 , ricavabile imponendo l'uguaglianza tra le
aree A e B sottese dalla curva vL (Figura 10.15).
Il tempo t1 in cui la corrente id comincia a circolare può essere ricavato dalla equazione (10.13)
dove VSM è il valore massimo della tensione del generatore vS .
Vd = VsM cos(ωt1 )
(10.13)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
200
Figura 10.14: Raddrizzatore con tensione costante lato continua
Figura 10.15: Forme d'onda di un raddrizzatore nell'ipotesi di tensione lato continua costante
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
201
Figura 10.16: Andamento normalizzato della corrente media Id in funzione della tensione Vd
Quando la corrente circola nel carico, la tensione vL dell'induttore è data dall'equazione (10.14).
L'equazione (10.14) consente di ricavare l'istante di tempo t3 in cui la corrente del carico si annulla
come indicato in (10.15)
did
= VsM sin(ωt) − Vd
dt
Z t3
Z t3
vL dt =
(VsM sin(ωt) − Vd )dt = 0
vL = Ls
t1
t1
(10.14)
(10.15)
Il valore medio Id della corrente che circola nel carico può essere ottenuto integrando la corrente
come indicato in (10.16).
Z t3
1
Id =
id dt
(10.16)
T /2 t1
E' intuitivo che, ssato il valore dei parametri del circuito di conversione, il valore di Id dipenderà dal valore della tensione Vd del carico. Normalizzando il valore di Vd secondo un opportuno
valore di tensione Vd0 , valore medio della tensione del carico per Ls = 0 e carico puramente
resistivo, si veda (10.5), e di Id con il valore di corrente di corto circuito dell'alimentazione Icc ,
indicato in (10.17), si ottiene il graco in Figura 10.16 che rappresenta l'andamento del valore
medio di corrente per vari valori di tensione Vd .
Icc =
10.3.5
Vs
ωLs
(10.17)
Funzionamento con condensatore, carico resistivo, Ls = 0
In Figura 10.17 è presentato il circuito raddrizzatore a ponte con condensatore Cf , carico resistivo
e con induttanza di linea nulla.
Il condensatore ha il compito di ltrare la tensione, lato continua. Infatti, la presenza del
condensatore Cf fa sì che la tensione vd sul carico segua un andamento dierente dalla tensione
raddrizzata teorica |vs | (si veda la Figura 10.18) In particolare, quando la tensione sul condensatore
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
202
Figura 10.17: Raddrizzatore a ponte con condensatore e carico resistivo, Ls = 0
risulta maggiore della tensione |vs |, tutti i diodi si trovano nello stato di blocco ed il condensatore
rimane scollegato dalla linea di alimentazione. L'andamento di vd (t) è quello tipico di una risposta
libera di un transitorio RC. La corrente id assorbita dalla linea è leggermente in anticipo rispetto
alla tensione ed è di tipo impulsivo.
Più è elevata la costante di tempo Rc Cf più diminuisce l'ondulazione ∆v della tensione sul
carico (Figura 10.19) (d'altra parte il tempo in cui il condensatore rimane collegato alla rete
diminuisce). Si noti che, avendo considerato bipoli ideali, l'energia erogata al carico (che nell'ipotesi
di vd poco variabile coincide con l'area ic della Figura 10.19) eguaglia quella assorbita ai morsetti
di vs (che sempre nell'ipotesi di vd poco variabile coincide con l'area id ). Dal momento che al
crescere di Cf si riduce sempre di più l'intervallo di tempo di conduzione del ponte, ne consegue
che il valore di picco di id tende ad assumete valori non ammissibili per i diodi. Questa situazione
cambia per eetto della inevitabile presenza di un induttore Ls sul lato di alimentazione come
verrà indicato nel paragrafo 10.3.6.
10.3.6 Funzionamento con condensatore, carico resistivo, Ls 6= 0
Si consideri ora il circuito rappresentato in Figura 10.20 che rappresenta una modellazione di un
impianto di conversione a ponte a diodi, più aderente alla realtà. Solitamente, infatti, l'alimentazione del ponte è assicurata da un trasformatore alimentato da una linea di potenza nominale
elevata, schematizzata dal generatore ideale di tensione vs , collegato al convertitore da una linea
monofase. Il parametro Ls tiene quindi conto dell'induttanza di dispersione del trasformatore e
di quella di linea. Analofo signicato ha la resistenza Rs .
Per lo studio del circuito si assume ora che, come avviene nella maggior parte dei casi, i
valori della capacità Cf e della induttanza Ls siano tali che la corrente id presenti un andamento
discontinuo simile a quello rappresentato in Figura 10.21 ed in particolare che la corrente si annulli
prima del passaggio per lo zero della tensione di alimentazione. Se queste ipotesi sono soddisfatte è
possibile studiare le tensioni e le correnti a valle del convertitore utilizzando il circuito equivalente
di Figura 10.22.
Assumendo come variabili di stato la corrente nell'induttore id e la tensione sul condensatore
vd si possono scrivere le equazioni (10.18) e (10.19) valide durante il periodo di conduzione del
diodo.
|vs | = Rs id + Ls
id = Cf
dis
+ vd
dt
dvd
vd
+
dt
Rc
(10.18)
(10.19)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
203
Figura 10.18: Forme d'onda di un raddrizzatore a ponte con condensatore, carico resistivo e Ls = 0
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
204
Figura 10.19: Forme d'onda di un raddrizzatore a ponte con elevata costante di tempo
Figura 10.20: Raddrizzatore a ponte con condensatore, carico resistivo e Ls 6= 0
Figura 10.21: Forme d'onda di un raddrizzatore a ponte con condensatore, carico resistivo e Ls 6= 0
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
205
Figura 10.22: Circuito equivalente
Figura 10.23: Raddrizzatore trifase con carico resistivo
Durante gli istanti in cui il diodo non conduce si ha id = 0 e la tensione vd del carico varia con
la legge (10.20). Le forme d'onda che ne conseguono sono riportate in Figura 10.21.
dvd
1
=−
vd
dt
Cf Rc
10.4
(10.20)
Raddrizzatore trifase a ponte non controllato
Nelle applicazione industriali dove è disponibile una alimentazione trifase è preferibile utilizzare
un ponte raddrizzatore trifase che presenta delle ondulazioni di tensione e corrente più contenute
rispetto all'equivalente monofase. Vengono nel seguito esaminati alcuni esempi di funzionamento
del convertiore che consentono un approccio intuitivo allo studio. In tutti i casi presentati le
valvole saranno considerate ideali.
10.4.1
Funzionamento con carico resistivo
La struttura del convertitore è riportata in Figura 10.23 e le forme d'onda, ottenute in maniera
analoga a quanto visto per il ponte monofase, sono riportate in Figura 10.24 (sono in conduzione
il diodo superiore con il maggior potenziale anodico e il diodo inferiore con il minor potenziale
catodico).
Il potenziale del morsetto P rispetto al centro stella dei generatori n segue, quindi, l'inviluppo
superiore delle tre tensioni di fase, mentre quello del morsetto N segue l'inviluppo inferiore. La
tensione sul carico vd coincide con la tensione vP N tra i morsetti P e N (10.21). Il suo valore
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
206
Figura 10.24: Forme d'onda di tensione in un raddrizzatore trifase con carico resistivo
massimo è pari al valore massimo della tensione concatenata e la sua periodicità è pari a 1/6 del
periodo della fondamentale.
vd = vP n − vN n
(10.21)
Il valore medio vd0 della tensione raddrizzata può essere ottenuto integrando per T /6 la tensione
concatenata (Vc è il valore ecace della tensione concatenata) come indicato in (10.22)
√
3 2
Vc ≈ 1.35 · Vc
(10.22)
T
π
− 12
√
√Il valore della tensione vd varia tra un massimo pari a 2Vc ≈ 1.41 · Vc ed un minimo pari
a 2 · Vc cos(π/6) ≈ 1.23 · Vc con una ondulazione (ripple) decisamente più limitata rispetto al
caso monofase.
La corrente nel carico resistivo ha un andamento simile a quello della tensione raddrizzata. La
corrente di linea, in uno qualsiasi dei tre conduttori, si può facilmente ricostruire utilizzando le
leggi di Kirchho ai nodi A, B e C come indicato in (10.23).
Vd0 =
1
T /6
Z
T
12
√
2Vc cos(ωt)dt =
i1 = iD1 − iD4
i2 = iD3 − iD6
(10.23)
i3 = iD5 − iD2
. In Figura 10.25 viene mostrato l'andamento della corrente di linea i1 e, con tratteggio, la sua
prima armonica, il cui valore massimo è indicato in (10.24):
I1M =
2
T
Z
T
2
− T2
i1 (t) sin(ωt)dt
(10.24)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
207
Figura 10.25: Forme d'onda di corrente in un raddrizzatore trifase con carico resistivo
10.4.2
Funzionamento con corrente, lato continua, costante
Si consideri il circuito rappresentato in Figura 10.26 in cui è rappresentato in forma molto schematica il caso, ricorrente nella tecnica, di un impianto che alimenta un carico industriale RL
fortemente induttivo. In questo caso la tensione sul carico è ondulato come nel caso precedente
(si veda la Figura 10.27), ma la corrente presenta una ondulazione tanto più ridotta, quanto più
alta è la costante di tempo τ = L/R del carico. Al limite (per τ → ∞) la corrente di carico può
essere schematizzata con un generatore di corrente costante Id .
La corrente in uno qualsiasi dei conduttori di linea segue le stesse regole già introdotte nel
paragrafo precedente. Poiché i diodi conducono per 1/3 del periodo T , l'andamento della corrente
di linea è rappresentato in Figura 10.28. Nella stessa gura viene anche visualizzata la prima
armonica ad essa associata, che risulta in fase con la tensione.
Il valore massimo della corrente di linea si può ottenere come indicato in (10.25). Il valore
ecace di prima armonica è indicato in (10.26).
I1M =
10.4.3
2
T
Z
T
2
− T2
√
Z π2
4
2 3
Id sin αdα =
Id ≈ 1.1Id
π π6
π
√
I1M
6
Id ≈ 0.78Id
I1 = √ =
π
2
i1 (t) sin(ωt)dt =
(10.25)
(10.26)
Funzionamento con corrente, lato continua, costante e Ls 6= 0
Come per il caso monofase, la presenza di una induttanza Ls in serie ai generatori di tensione
(Figura 10.30) non permette alla corrente di linea di assumere l'andamento a gradino di Figura
10.29. Infatti se nel circuito la corrente variasse a gradino, su Ls si manifesterebbe un impulso
di tensione e non sarebbe soddisfatta la legge di Kirchho delle tensioni in una qualsiasi maglia
comprendente Ls e i generatori di tensione.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.26: Raddrizzatore trifase con generatore di corrente
Figura 10.27: Andamenti di tensione e corrente nel carico
Figura 10.28: Andamenti di tensione e corrente di linea in una fase
208
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.29: Andamento delle correnti di linea
Figura 10.30: Raddrizzatore trifase con corrente costante lato continua e e Ls 6= 0
209
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
210
Figura 10.31: Circuito equivalente durante la commutazione tra D5 e D1
Si voglia ora il transitorio di commutazione in maniera analoga a quanto fatto per il caso
monofase. Come origine dei tempi per lo studio del transitorio, si consideri l'istante in cui sono
in conduzione i diodi D6 e D5 e debba entrare in conduzione il diodo D1 (istante t1 di Figura
10.29 per il caso con Ls = 0). A partire da questo istante di tempo il diodo D5 evolve verso lo
stato di blocco, D1 entra in conduzione mentre D6 continua a rimanere in conduzione. Il circuito
equivalente per la commutazione tra D5 e D1 è presentato in Figura 10.31.
La legge di Kirchho delle correnti al nodo P permette di scrivere i3 = Id − i1 che sostiuita
nella legge di Kirchho alla maglia A (10.27), indicata in Figura 10.31, conduce all'equazione
dierenziale (10.28), dove si è tenuto conto anche che Id è costante.
v1 (t) − Ls
di1
di3
+ Ls
− v3 (t) = 0
dt
dt
(10.27)
di1
d(Id − i1 )
di1
− Ls
= 2Ls
(10.28)
dt
dt
dt
La soluzione dell'equazione dierenziale (10.28) può essere ottenuta
per integrazione con con√
dizione iniziale i1 (0) = 0 e tenendo conto che v13 (t) = v1 − v3 = 2Vc sin(ωt) (dove Vc è ancora il
valore ecace della tensione concatenata), come indicato in (10.29).
√
2Vc
(1 − cos ωt)
(10.29)
i1 (t) =
2ωLs
Il tempo di commutazione tc può essere determinato imponendo che la commutazione termini
quando la corrente di linea ha raggiunto il valore Id , come indicato in (10.30). In letteratura viene
spesso indicato anche l'angolo di commutazione calcolato come indicato in (10.31)
√
µ
¶
2Vc
1
2Id ωLs
(1 − cos ωtc )
tc = arccos 1 − √
(10.30)
i1 (tc ) = Id =
2ωLs
ω
2Vc
µ
¶
2Id ωLs
u = ωtc = arccos 1 − √
(10.31)
2Vc
v1 (t) − v3 (t) = Ls
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
211
Figura 10.32: Andamento della corrente di linea e dei diodi D1 e D5 durante la commutazione
In Figura 10.32 vengono presentati gli andamenti della corrente dei diodi D1 (che coincide con
l'andamento di i1 ) e D5 durante la commutazione.
La (10.28) e la Figura 10.31 evidenziano che durante l'intervallo di commutazione la tensione
sul carico è dierente dall'andamento teorico. Per poter determinarne l'andamento è necessario
determinare il potenziale del nodo P rispetto al centro stella dei generatori n che si calcola,
considerando ad esempio la linea 1, come indicato in (10.32).
di1
v13 (t)
= v1 (t) −
(10.32)
dt
2
L'espressione della tensione vd del carico si trova considerando la maglia esterna di Figura
10.31 come indicato in (10.33). L'andamento delle tensioni considerate è riportato in Figura 10.33
vP n (t) = v1 (t) − Ls
vd (t) = v12 (t) − Ls
10.4.4
di1
v13 (t)
= v12 (t) −
dt
2
(10.33)
Funzionamento con tensione, lato continua, costante
Si consideri il circuito rappresentato in Figura 10.34, dove si assume che la tensione, lato continua,
sia costante. Questo circuito può essere considerato come una prima approssimazione del circuito
in presenza di una capacità Cf , lato continua, di valore molto elevato.
In maniera analoga a quanto fatto per il caso monofase, si ipotizza che i valori di Ls e Vd siano
tali da rendere discontinuo l'andamento della corrente id . (in questo caso non sussiste il fenomeno
della commutazione in quanto la corrente da commutare è già nulla). Sotto queste condizioni le
forme d'onda di tensione e corrente sono presentate in Figura 10.35.
In questo caso quando la tensione raddrizzata teorica (a vuoto vd0 ) supera la tensione Vd il
diodo comincia a condurre. Il raggiungimento del picco di corrente avviene quando la tensione
vd0 eguaglia nuovamente la tensione Vd . Da questo istante la tensione sull'induttanza LS diventa
negativa e la corrente inizia a diminuire nché si annulla. La corrente della linea 1 è ancora legata,
attraverso una legge ai nodi, alla corrente del diodo D1 e del diodo D4.
10.4.5
Ponte raddrizzatore trifase reale
In Figura 10.36 è riportato il circuito equivalente che approssima in maniera abbastanza buona
il comportamente di un ponte raddrizzatore trifase non controllato reale. Lo studio del circuito
riportato è decisamente complesso e si preferisce, generalmente, analizzarlo utilizzando un programma di simulazione opportuno (ad esempio PSPICE). Gli andamenti di tensione e corrente,
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.33: Forme d'onda di tensione in un raddrizzatore trifase con induttanza Ls 6= 0
Figura 10.34: Raddrizzatore trifase con tensione costante lato continua
212
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
213
Figura 10.35: Forme d'onda di un raddrizzatore trifase con tensione lato continua costante
in questo caso, sono molto simili a quelli visti nel paragrafo 10.4.4 considerando che l'andamento
della tensione vd non sarò più costante, ma presenterà una uttuazione con periodicità sestupla
rispetto alla fondamentale dei generatori di tensione trifase.
I vantaggi di un sistema trifase rispetto a quello monofase sono:
• riduzione dell' ondulazione di corrente;
• condensatore di capacità Cf minore a parità di uttuazione della tensione vd
10.5
Raddrizzatori controllati
Una categoria di convertitori CA-CC, con tensione continua regolabile in modulo, di rilevante
interesse industriale, è quella che utilizza come valvole controllate dei tiristori. Vista la natura
della valvola che presenta tensioni di blocco e correnti dirette elevate, i convertitori si presntano ad
Figura 10.36: Circuito equivalente di un ponte raddrizzatore trifase reale
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
214
Figura 10.37: Funzionamento di un raddrizzatore controllato
Figura 10.38: Convertitore a quattro quadranti controllato ottenuto con due convertitori a due
quadranti
erogare potenze elevate con funzionamento su due quadranti, si veda Figura 10.37 (non è possibile
il funzionamento su tutti e quattro i quadranti in quanto la corrente nei tiristori è unidirezionale).
Tensioni Vd e correnti Id positive indicano un funzionamento da raddrizzatore, mentre tensioni
Vd negative ed Id positive indicano un funzionamento come inverter. In questo caso, per il corretto
funzionamento del convertitore, è necessaria la presenza, nel carico, di un generatore (batteria
o forza elettromotrice) che mantenga la corrente Id positiva. Collegando opportunamente due
convertitori a due quadranti, si veda Figura 10.38, è possibile ottenere un convertitore a quattro
quadranti.
10.6
Convertitore monofase controllato a semplice semionda
Il circuito monofase controllato a semplice semionda è costituito da una sola valvola (tiristore o
SCR) a conduzione unidirezionale, comandabile in chiusura, posta in serie ad un generico carico
(Figura 10.39). Il circuito è alimentato da una tensione alternata sinusoidale. Tale congurazione
circuitale ha un limitato interesse pratico per le limitazioni intrinseche che presenta, tuttavia il suo
studio mette il luce una serie di peculiarità tipiche per comprendere i circuiti che trovano ampia
applicazione.
Fino a quando non viene fornita la necessaria corrente ig all'elettrodo di controllo (gate),
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
215
Figura 10.39: Raddrizzatore controllato a semplice semionda, su carico resistivo
il tiristore permane in stato di blocco (diretto e inverso). Il carico risulta, quindi, scollegato
dall'alimentazione. Nel momento in cui viene fatta circolare una corrente ig opportuna, il tiristore
si comporta come un diodo. Se in tale istante la valvola è polarizzata direttamente, la valvola
si chiude e permane in stato di chiusura senza necessità di mantenere la corrente ig . Verranno
ripristinate le capacità di blocco non appena la corrente della valvola (id o is ) si annulla. Per i
carichi dierenti dal caso puramente resistivo i ragionamenti sono simili a quelli presentati per il
raddrizzatore non controllato (Figura 10.40).
10.7
Raddrizzatore monofase a ponte controllato
10.7.1 Funzionamento con corrente, lato continua, costante
Si consideri il circuito rappresentato in Figura 10.41 in cui il carico può essere rappresentato da un
generatore di corrente costante. E' il caso, come già dettom di carichi R-L fortemente induttivi, in
cui la variazione della corrente è limitata dalla elevata costante di tempo del carico no al punto
da poterla considerare nulla. Come già visto per il caso di carico resistivo, tra i diodi a catodo
comune conduce quello che possiede il maggiore potenziale dell'anodo e, viceversa, per i diodi ad
anodo comune.
Mediante l'iniezione di una opportuna corrente all'elettrodo di controllo dei tiristori, è possibile
comandare l'istante di chiusura (tα = α/ω ) delle valvole stesse. In Figura 10.42 vengono presentati
gli andamenti delle correnti e delle tensioni sia di linea che del carico oltre che l'andamento della
prima armonica della corrente di linea (is1 ). Si può notare che l'istante di accensione, a cui è
associato l'angolo α, determina anche lo sfasamento tra la tensione di linea vs e la prima armonica
della corrente is .
Il valore medio Vd della tensione sul carico può essere ottenuta integrando l'andamento della
tensione vs in un semiperiodo come indicato in (10.34)
1
Vd (α) =
π
Z
π+α
α
√
√
2 2
2Vs sin(ωt)d(ωt) =
Vs cos α = Vd0 cos α ≈ 0.9Vs cos α
π
(10.34)
Al variare dell'angolo α è quindi possibile variare il valore medio della tensione sul carico, come
presentato in Figura 10.43. Per α < π/2 si ha il funzionamento come raddrizzatore (con le forme
d'onda presentate in Figura 10.42); per π/2 < α < π si ha il funzionamento da inverter (con le
forme d'onda indicata in Figura 10.44).
10.7.2 Funzionamento con corrente, lato continua, costante e induttanza di linea Ls 6= 0
Come già descritto in precedenza a proposito del ponte non controllato, la presenza di una induttanza di linea Ls non permette che la corrente di linea is possa assumere l'andamento a gradino
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
216
Figura 10.40: Forme d'onda di tensione e corrente in un raddrizzatore controllato a semplice
semionda, su carico resistivo
Figura 10.41: Raddrizzatore controllato a ponte, su carico con corrente costante
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
217
Figura 10.42: Forme d'onda di tensione e corrente in un raddrizzatore controllato a ponte, su
carico con corrente costante
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.43: Valore della tensione sul carico in funzione dell'angolo α
Figura 10.44: Forme d'onda di tensione in funzionamento da inverter
218
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
219
Figura 10.45: Raddrizzatore controllato a ponte, con corrente costante lato continua e Ls 6= 0
di Figura 5-41.
In questo caso, però, l'istante di inizio della commutazione non corrisponde al passaggio per lo
zero della tensione di linea, ma è imposto dall'angolo α di accensione dei tiristori. Esisterà, quindi,
un angolo di commutazione u in cui conducono simultaneamente la coppia di tiristori T1 e T3 e
la coppia T4 e T6 (Figura 10.45). In questo periodo la tensione sul carico è nulla e il valore della
corrente is passa da −Id a Id (o viceversa nell'altro semiperiodo). L'andamento di is è legato alla
legge alla maglia (10.35) (i nodi A e B, in questa fase, sono equipotenziali), da integrare con la
condizione iniziale is (α/ω) = Id . La soluzione è indicata in (10.36).
√
2Vs sin ωt − Ls
dis
=0
dt
(10.35)
√
is (t) = Id −
2Vs
(cos α − cos ωt)
ωLs
(10.36)
L'angolo di commutazione u = ωtc è tale da soddisfare la condizione (10.37).
√
2Vs
is (α + u) = −Id = Id −
(cos α − cos(α − u))
ωLs
¶
µ
2Id ωLs
− α (10.37)
u = arccos cos α − √
2Vs
In Figura 10.46 vengono presentati gli andamenti della corrente di linea e della tensione sul
carico, per eetto della commutazione.
La presenza dell'angolo u di commutazione e la necessità di disporre di un tempo minimo
anché il tiristore che deve andare in stato di blocco possa sopportare il riapplicarsi di una
tensione positiva senza riaccendersi, richiedono che il limite massimo dell'angolo α, durante il
funzionamento da inverter, sia minore di 180◦ . Viene usualmente indicato in 150◦ tale limite.
10.7.3
Funzionamento con macchine a corrente continua
Il raddrizzatore controllato, a ponte monofase, può essere usato per alimentare macchine a corrente
continua, il cui circuito equivalente (Figura 10.47) è rappresentato dalla serie di una resistenza,
una induttanza e di un generatore di tensione E .
La costante di tempo L/R è generalmente elevata e tale da livellare la corrente attorno al
valore medio. In queste condizioni, sono valide le considerazioni presentate per il convertitore con
induttanza di linea e generatore di corrente costante. L'andamento qualitativo delle correnti e
delle tensioni è riportato in Figura 10.48. La gura evidenzia che la prima armonica della corrente
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.46: Corrente di linea e tensione sul carico: eetti della commutazione
Figura 10.47: Raddrizzatore controllato a ponte che alimenta una macchina a c.c.
220
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
221
Figura 10.48: Andamento della corrente di linea e della tensione sul carico, nel caso di
alimentazione di maccina a c.c.
di linea risulta ulteriormente sfasata in ritardo per eetto dell'angolo di commutazione u. Tale
angolo di ritardo viene generalmente approssimato al valore di φ1 = α + u/2.
10.8
Raddrizzatore trifase a ponte controllato
Il raddrizzatore trifase controllato presenta una struttura simile a quella del ponte non controllato,
ad eccezione del fatto che le valvole utilizzate non sono diodi ma tiristori. E' possibile, quindi,
decidere, mediante una opportuna corrente agli elettrodi di controllo, l'istante di passaggio dalla
stato di blocco diretto a quello di diodo. Il segnale di comando deve essere applicato nell'intervallo
di tempo in cui la valvola si trovi al potenziale anodico maggiore, se appartenente al semiponte
superiore (T1, T3, T5), o al potenziale catodico minore, se appartenente al semiponte inferiore
(T2, T4, T6).
10.8.1
Funzionamento con corrente, lato continua, costante
Si consideri il circuito rappresentato in Figura 10.49 in cui il carico può essere rappresentato da un
generatore di corrente costante e pari a Id . L'andamento della tensione sul carico è visualizzato in
Figura 10.50, dove è possibile notare l'angolo di ritardo α, tra l'istante di commutazione naturale
tipico del ponte a diodi e l'inizio dell'impulso di corrente di gate (in gura viene mostrato tale
impulso per il tiristore T1).
Il valore medio della tensione raddrizzata può essere ottenuto integrando per T /6 la tensione
concatenata (Vc è il valore ecace della tensione concatenata) come indicato in (10.38)
Vd (α) =
1
π/3
Z
π
6 +α
−π
6 +α
√
2Vc cos(ωt)d(ωt) =
3√
2Vc cos α ≈ 1.35Vc cos α
π
(10.38)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
222
Figura 10.49: Raddrizzatore trifase con generatore di corrente lato continua
Variando α è possibile ottenere in uscita una tensione variabile tra 1.35Vc e −1.35Vc . Per
Vd (α) > 0 (id non può che essere positiva) si ha il funzionamento da raddrizzatore, mentre per
Vd (α) < 0 quello da inverter.
La corrente di linea segue le stesse regole già introdotte per il ponte a diodi: è pari alla corrente
nel tiristore il cui anodo è connesso alla linea ed è l'inverso della corrente che circola nel tiristore
con il catodo connesso. Poiché i tiristori conducono per 1/3 del periodo T , con un ritardo α/ω
rispetto all'istante della commutazione naturale, l'andamento della corrente di linea è del tipo
rappresentato in Figura 10.51. Nella stessa gura viene anche visualizzata la prima armonica ad
essa associata, che risulta in ritardo dell'angolo α rispetto alla corrispondente tensione di fase.
Il suo valore massimo ed il valore ecace della prima armonica di corrente sono indicati in
(10.39) e sono identici a quelli già calcolati per il ponte a diodi.
√
√
2 3
6
I1M
I1M =
Id ≈ 1.1Id
I1 = √ =
Id ≈ 0.78Id
(10.39)
π
π
2
10.8.2
Funzionamento con corrente, lato continua, costante e Ls 6= 0
Le uniche dierenze rispetto al caso del ponte trifase non controllato riguardano il fatto che l'istante
di accensione non è naturale, ma comandato attraverso una opportuna corrente di gate. Ciò che
cambia, quindi, è l'istante di inizio della commutazione e le condizioni iniziali dierenti.
Si consideri la Figura 10.53 ed in particolare l'istante corrispondente all'angolo α+π/6. Appena
prima di tale istante sono in conduzione i tiristori T6 e T5. Appena dopo il tiristore T5 va in stato
di blocco, il tiristore T1 inizia a condurre mentre il tiristore T6 continua a condurre la corrente
Id .
Il circuito equivalente su cui studiare la commutazione tra il tiristore T5 e T1 è presentato
in Figura 10.54 e le equazioni sono identiche al caso non controllato (l'unica dierenza è che il
transitorio inizia all'istante (α + π/6)/ω ). L'angolo di commutazione u risponde all'equazione
indicata in (10.40)
¶
µ
2Id ωLs
−α
(10.40)
u = arccos cos α − √
2Vc
Nel periodo di commutazione la tensione sul carico vd è dierente dall'andamento teorico e
assume ancora il valore intermedio tra le due tensioni di fase, come viene evidenziato nella Figura
10.55 ed in (10.41)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
223
Figura 10.50: Forme d'onda di tensione in un raddrizzatore trifase controllato
Figura 10.51: Andamenti di tensione e corrente di linea di un ponte controllato con corrente lato
continua costante e Ls = 0
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
224
Figura 10.52: Raddrizzatore trifase controllato con corrente costante lato continua e Ls 6= 0
Figura 10.53: Andamento delle correnti di linea nel caso ideale di Ls = 0
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
225
Figura 10.54: Circuito equivalente durante la commutazione tra il tiristore T5 e T1
Figura 10.55: Forme d'onda di tensione in un raddrizzatore trifase con induttanza Ls 6= 0
v13 (t)
(10.41)
2
La prima armonica della corrente di linea è in ritardo rispetto alla corrispondente tensione di
fase di un angolo ∆ϕ approssimabile mediante l'espressione α + u/2.
La presenza dell'angolo u di commutazione e la necessità di disporre di un tempo minimo
anché il tiristore che deve andare in stato di blocco possa sopportare il riapplicarsi di una
tensione positiva senza riaccendersi, richiedono che il limite massimo dell'angolo α, durante il
funzionamento da inverter, sia minore di 180◦ . Viene usualmente indicato in 150◦ tale limite. In
caso contrario si avrebbe una commutazione fallita dovuta al fatto che alla valvola in procinto di
spegnersi viene riapplicata una tensione diretta prima che siano state ripristinate le sue capacità
di blocco.
vd (t) = v12 (t) −
10.8.3 Funzionamento con macchine a corrente continua
Il raddrizzatore controllato, a ponte trifase, può essere usato per alimentare macchine a corrente
continua, il cui circuito equivalente (Figura 10.56) è rappresentato dalla serie di una resistenza,
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
226
Figura 10.56: Raddrizzatore trifase controllato che alimenta una macchina a c.c.
una induttanza e di un generatore di tensione E .
Come già accennato per il caso monofase, la costante di tempo L/R è generalmente elevata e
tale che la corrente id è livellata attorno al valore medio. In queste condizioni le considerazioni
presentate per il convertitore con induttanza di linea e generatore di corrente costante, sono ancora
valide. L'andamento qualitativo delle correnti e delle tensioni è riportato in Figura 10.57.
10.8.4
Disturbi in linea dovuti ai raddrizzatori
Durante la fase di commutazione due tiristori (o due diodi nel caso non controllato) conducono
simultaneamente, provocando un corto circuito tra le fasi corrispondenti. Tale condizione non
porta alla rottura di alcun componente in quanto la corrente è, in qualche modo, imposta dal
carico (la corrente di una fase passa da 0 a id mentre l'altra da id a 0), ma possono venire
disturbati eventuali carichi connessi alla stessa linea. Si ipotizzi, infatti, che una linea alimenti
due carichi: un ponte raddrizzatore trifase ed un apparecchio elettrico connesso in un punto della
linea nelle immediate vicinanze del ponte (si veda Figura 10.58).
Durante una commutazione (ad esempio tra il tiristore T1 ed il T5) i morsetti corrispondenti sono portati allo stesso potenziale e la tensione concatenata (v13 ) che alimenta l'apparecchio
diminuisce bruscamente di un fattore pari a Ls2 /(Ls1 + Ls2 ) (viene applicata la formula di un
partitore induttivo alla serie di Ls1 con Ls2 ): più è basso il valore di Ls2 , più è profondo il buco
nella tensione concatenata. Nella Figura 5.38 è rappresentata la tensione quale sarebbe vista da
una apperecchiatura collegata ai morsetti del convertitore. La presenza dei convertitori produce
quindi un disturbo sugli apparecchi collegati alla stessa linea al punto che è spesso opportuno
dotare il convertitore di dispositivi in grado di attenuare, in modo sensibile, tali disturbi.
10.9
I convertitori CC-CC e CC-CA
La maggior parte delle applicazioni di controllo di macchine elettriche richiedono una tensione regolabile in ampiezza e/o frequenza. Nel seguito verrano presentati alcuni esempi di convertitori che
consentono di ottenere tensioni in corrente continua o alternata opportunamente regolabili partendo da una sorgente di tensione continua che può essere ottenuta con i convertitori precedentemente
presentati.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
227
Figura 10.57: Andamento della corrente di linea e della tensione e della corrente del carico nel
caso di alimentazione di macchine a corrente continua
Figura 10.58: Alimentazione di più carichi
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.59: Andamento della tensione concatenata nel caso di Ls2 = 0
228
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
229
Figura 10.60: Convertitore a quattro quadranti
10.10
Il convertitore a quattro quadranti monofase
Il convertitore a quattro quadranti è presentato in Figura 10.60: ai morsetti P-N di ingresso è
applicata una tensone continua Vd , ai morsetti di uscita A-B, in relazione ai comandi impartiti alle
valvole, si può riscontrare o una tensione a valore medio regolabile oppure una tensione alternata
la cui prima armonica presenta valore massimo regolabile. Il convertitore quindi si presta al
comando di azionamenti in corrente continua o in corrente alternata come pure alla conversione cccc con isolamento galvanico (con la seguente congurazione: ponte non controllato-condensatoreconvertitore a 4 quadranti-trasformatore di isolamento-ponte non controllato-condensatore).
In eetti, grazie alla presenza dei diodi in antiparallelo, se gli interruttori comandati di ognuna
delle due gambe (1-4 e 3-6) non sono mai aperti simultaneamente ma sono guidati in modo che se
uno conduce l'altro è aperto, allora questi interruttori individuano la tensione ai morsetti del A-B
carico mentre è il carico a determinare il segno della corrente.
Infatti se ad esempio T1 è chiuso allora T4 è aperto e D4 è contropolarizzato. Allora la tensione
vAN = Vd , mentre la corrente ic del carico passerà tramite T1 se positiva o tramite D1 se negativa.
Se T1 è aperto allora T4 è chiuso e la tensione vAN = 0 mentre la corrente passerà tramite D4 se
positiva e tramite T4 se negativa. Le stesse considerazioni valgono per la gamba 3-6 per modo che
la tensione sul carico vc = vAN − vBN dipenderà dai comandi delle valvole in modo indipendenta
dalla corrente.
Si noti che lo stesso non sarebbe stato vero se entrambi gli interruttori di una gamba potessero
restare aperti (chiusi è escluso perché si formerebbe un evidente corto circuito); infatti in tal caso
la tensione vAN sarebbe stata pari a Vd con ic < 0 e nulla con ic > 0 e quindi la tensione sul carico
non sarebbe stata controllata tramite i comandi degli interruttori.
Complessivamente la tensione sul carico può essere comandata come si desidera in valore e
segno, mentre la corrente è la risposta del carico alla tensione impressa.In conclusione, la tensione
e la corrente vc , ic si possono trovare in uno qualsiasi dei quattro quadranti indicati in Figura
10.61.
Per generare i comandi degli interruttori si possono usare tecniche PWM (Pulse Width Modulation - Modulazione a larghezza di impulso) e cioè si modulano adeguatamente ai morsetti del
carico impulsi della tensione continua Vd disponibile a monte del convertitore. Questo risultato si
ottiene comparando una tensione di controllo vrif (tensione di riferimento o tensione modulante;
nel seguito sarà preferita la prima denominazione ad indicare che vrif è normalmente il segnale di
uscita di un regolatore di corrente e rappresenta il valore di tensione da realizzare tramite il convertitore) di ampiezza variabile con una tensione portante vp alternata di frequenza triangolare
e di ampiezza costante secondo una delle seguenti tecniche.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
230
Figura 10.61: Quadranti di funzionamento del convertitore
Figura 10.62: Tecnica di modulazione PWM
• PWM con tensione in uscita bipolare: le due gambe vengono tra loro asservite nel senso che
se T1 è chiuso allora anche T6 è chiuso e sono aperti T4 , T3 (e viceversa): in questo modo la
tensione sul carico vc = VAB vale Vd con T1 e T6 chiusi e −Vd con T3 e T4 chiusi (sul carico
compaiono quindi impulsi bipolari ±Vd di durata modulabile).
• PWM con tensione in uscita unipolare controllando le tensioni in uscita di ogni gamba senza
asservimenti.
Avvalendosi di una di queste tecniche di modulazione il convertitore può essere impiegato sia per
la conversione CC-CC (con tensione modulante costante), sia per la conversione CC-CA (con
tensione modulante alternata sinusoidale).
10.10.1 Conversione cc-cc con PWM bipolare.
La tecnica viene indicata in Figura 10.62 nella ipotesi di interruttori ideali (senza i tempi morti tra
due commutazioni successive necessari per assicurare il ripristino del blocco in apertura): quando
la modulante vrif è maggiore della portante vp la tensione applicata al carico è Vd (T1 , T6 chiusi),
al contrario è −Vd (T3 , T4 chiusi). Dalla gura si deduce che quando vrif > 0 allora vc presenta
un valore medio positivo ed al limite pari a Vd quando vrif = vpM e che quando vrif < 0 allora vc
presenta un valore medio negativo ed al limite pari a −Vd quando vrif = −vpM ; la tensione media
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
(a) Funzionamento come motore
231
(b) Funzionamento come generatore
Figura 10.63: Convenzioni di misura con velocità positiva
sul carico poi è nulla quando vrif = 0. Complessivamente il valore medio della tensione sul carico
vc varia proporzionalmente al rapporto vrif /vp e quindi a vrif come è indicato nella eq.10.42.
Vc =
vrif
Vd
Vd =
vrif = Kvrif
vpM
vpM
(10.42)
Come esempio applicativo consideriamo il caso di una macchina a c.c. a magneti permanenti
che funzioni a regime come motore alla velocità Ω. Le grandezze elettromeccaniche (valori medi)
rispondono alle eq.10.43 (dove Tc è la coppia resistente del carico) e le convenzioni di misura che
danno luogo a letture positive degli strumenti sono rappresentate in Figura 10.63a.
Vc = RIc + E = RIc + KΩ
T = KIc = Tc
(10.43)
Se alimentiamo questa macchina con un convertitore a quattro quadranti la situazione a regime
è quella indicata in Figura 10.64a. Nell'intervallo di tempo t1 < t < t2 sono chiuse le valvole T3 ,
T4 e la corrente ic , positiva e decrescente (con derivata dic /dt = −(Vd + e)/L se si trascura l'eetto
di R), passa attraverso i diodi D4 , D3 ; nell'intervallo di tempo t2 < t < t3 sono chiuse le valvole
T1 , T6 e la corrente ic positiva e crescente (con derivata dic /dt = (Vd − e)/L se si trascura l'eetto
di R) passa tramite tali interruttori.
Se la macchina funziona a regime come generatore alla stessa velocità Ω le grandezze elettromeccaniche (valori medi) rispondono alla eq.10.62 (la corrente ai morsetti si è invertita ed
altrettanto è avvenuto per le coppie) e le convenzioni di misura che danno luogo a letture positive
degli strumenti sono indicate in Figura 10.63b.
Vc = E − RIc = KΩ − RIc
T = KIc = Tc
(10.44)
Nella Figura 10.64b è indicato l'andamento temporale delle tensioni e della corrente con le
convenzioni di misura di Figura 10.63b. Nell'intervallo di tempo t1 < t < t2 sono chiuse le valvole
T3 , T4 e la corrente (misurata con le convenzioni di Figura 10.63b) è positiva e crescente (con
derivata dic /dt = (Vd + e)/L) e passa tramite gli interruttori. Nell'intervallo di tempo t2 < t < t3
sono chiusi gli interruttori T1 , T6 e la corrente (sempre con le convenzioni di di Figura 10.63b) è
positiva decrescente (con derivata dic /dt = −(Vd − e)/L) e passa tramite i diodi D1 , D6 .
Nelle Figure 10.65a-b si sono indicate le convenzioni di misura che danno luogo a letture positive
nel funzionamento di regime con velocità −Ω rispettivamente come motore e come generatore,
mentre nelle Figure 10.66a-b è indicato l'andamento temporale delle tensioni e della corrente ai
morsetti della macchina alimentata dal convertitore.
L'esempio conferma la possibilità di modulare la tensione ai morsetti A-B del carico con la
corrente che il carico richiede per le sue speciche modalità di funzionamento. Risulta anche evidente che ogni interruttore comandato compie un ciclo di lavoro aperto/chiuso/aperto nel periodo
Tp = 1/fp della portante con perdite che dipendono dalla natura del carico (il dimensionamento
di tutte le valvole dovrà essere eettuato per la condizione di regime più gravosa) e che quanto più
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
(a) Funzionamento da motore
(b) Funzionamento da generatore
Figura 10.64: Andamento di tensioni e correnti con velocità positiva
(a) Funzionamento come motore
(b) Funzionamento come generatore
Figura 10.65: Convenzioni di misura con velocità negativa
232
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
(a) Funzionamento da motore
233
(b) Funzionamento da generatore
Figura 10.66: Andamento di tensioni e corrente con velocità negativa
alta è la frequenza massima fcM di commutazione ammissibile per gli interruttori (con fcM > fp )
tanto minore è l'ondulazione della corrente ai morsetti del carico (di tipo induttivo) e quindi minori
le ondulazioni di coppia e le perdite addizionali nei conduttori del carico.
10.10.2
Conversione CC-CA con PWM bipolare.
La tensione modulante vrif è alternata sinusoidale di ampiezza VM rif e frequenza frif , mentre la
tensione portante vp è alternata di forma triangolare con valore massimo VM p e frequenza fp . Si
deniscono in proposito l'indice di modulazione in ampiezza ma ed in frequenza mf indicati nella
eq.10.45 e si considera in primo luogo il funzionamento con ma ≤ 1 (in sottomodulazione).
ma =
VM rif
VM p
mf =
fp
frif
(10.45)
In questo caso la scelta più conveniente è quella indicata sinteticamente nella Figura 10.67: mf
è un intero dispari e le tensioni vrif , vp sono tra loro sincronizzate (all'istante di zero di vrif con
pendenza positiva è allacciato l'istante di zero di vp con pendenza negativa, e viceversa) questo
comporta che, mantenendo mf costante, al variare di frif la frequenza della portante vari secondo
la eq.10.46.
fp = mf frif
(10.46)
Con questa scelta la tensione modulata vc ai morsetti del carico presenta una armonica fondamentale vc1 che risponde alla eq.10.47 ed uno spettro in cui compaiono solo armoniche dispari il
cui ordine è denito dalla eq.10.48 (nella Fig.9 viene visualizzato lo spettro corrispondente ad un
particolare valore di ma e di mf ).
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.67: Sottooscillazione sinusoidale
Figura 10.68: Spettro
234
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
235
Tabella 10.1: Ampiezza delle armoniche presenti in funzione dell'ordine di armonicità e dell'indice
di modulazione
Le ampiezze delle armoniche dipendono da ma come viene indicato nella Tab.1 valida nella
ipotesi che sia mf convenientemente elevato (quanto meno per mf ≥ 9). La Tab.1 evidenzia che si
tratta di uno spettro particolarmente ricco i cui eetti possono essere limitati, nel caso di carichi
induttivi, adottando valori di mf convenientemente elevati. Un ulteriore vantaggio conseguente
a valori elevati (mf ≥ 9) è che la componente fondamentale vc1 risponde alla eq.8 a meno di un
errore inferiore a circa il 5% dovuto alle subarmoniche con frequenza fk = (2K + 1)fp − 2Hfm
(ad esempio per 2K + 1 = 9, fp = 9fm e per H = 4 si ha fk = 1.
Questa indicazione trova però limitazioni nel fatto che la frequenza fc di commutazione di
ogni interruttore (si veda la Figura 10.67) è quella indicata nella eq.10.49 e deve essere minore
del valore massimo fcM tipico di ogni interruttore. Ne consegue che se occorre regolare frif in
un ampio campo può risultare indispensabile modicare mf (riducendolo al crescere di frif ) per
rispettare la limitazione indicata dalla eq.10.49 (conviene in questa azione mantenere fp a ridosso
di fcM per avvalersi dell'eetto ltrante della induttanza del carico sulla corrente).
vc1 (t) = ma Vd sin ω1 t
fh
= hmf ± k
frif
ma ≤ 1
(h pari, k dispari; h dispari, k pari)
fc = fp = mf frif < fcM
(10.47)
(10.48)
(10.49)
La tecnica di sottomodulazione no ad ora indicata presenta i seguenti svantaggi.
• Non consente di utilizzare pienamente la tensione Vd dato che, al massimo, risulta Vc1M = Vd ,
mentre se, a pari Trif = 1/frif , venissero comandate in chiusura per il primo semiperiodo
Trif /2 gli interruttori T1 , T6 e per il secondo semiperiodo T3 , T4 la forma d'onda sarebbe
quella di Figura 10.69 (funzionamento in onda quadra), l'ampiezza della prima armonica
sarebbe Vc1M = 4Vd /π , la frequenza di commutazione sarebbe fc = frif e lo spettro sarebbe
quello indicato in Figura 10.70.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
236
Figura 10.69: Funzionamento in onda quadra
Figura 10.70: Spettro nel funzionamento in onda quadra
• La frequenza delle commutazioni è un multiplo intero dispari di frif e questo non sempre
è ammissibile al crescere di frif specie con gli interruttori comandati più lenti, quelli che
trovano applicazione industriali di alta potenza.
E' possibile però eettuare la transizione dal funzionamento in PWM al funzionamento in onda
quadra progressivamente con diverse tecniche tra le quali vi è quella della sovramodulazione. In
eetti, si veda la Figura 10.71, se l'ampiezza vM rif diventa maggiore di vM p si riduce il numero delle
commutazioni e la forma d'onda, riducendosi il numero degli intagli, si adegua progressivamente
a quella dell'onda quadra (durante la transizione lo spettro si adegua progressivamente a quello
dell'onda quadra di Figura 10.70). Il confronto tra la Figura 10.67 e la Figura 10.71 evidenzia che
la transizione in onda quadra dipende da mf e, a pari mf , è una funzione non lineare di ma come
è anche indicato qualitativamente dalla 10.72.
Complessivamente nel caso di interruttori comandati con frequenza massima di commutazione
particolarmente limitata occorre, al crescere di frif , ridurre mf e curare la transizione in onda
quadra (avvalendosi normalmente di diverse tecniche) avendo l'accortezza, in corrispondenza di
ogni variazione di mf , di mantenere inalterato in modulo e fase il valore della prima armonica di
tensione allo scopo di evitare bruschi transitori di corrente (nel caso trifase verrà presentato un
esempio di transizione).
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.71: Sovramodulazione
Figura 10.72: Relazione tra mf e ma
237
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
238
Figura 10.73: Il convertitore bistadio
10.11
Convertitore a quattro quadranti trifase: il caso del
convertitore bistadio
Si consideri il convertitore bistadio (inverter trifase) di Figura 10.73: il ponte controllato di ingresso consente di realizzare (con buona approssimazione) sul condensatore intermedio una tensione
continua regolabile, mentre il ponte controllato trifase in uscita consente di distribuire tale tensione sulle tre fasi del carico in uscita a frequenza f = 1/T regolabile tramite i comandi impartiti
alle valvole. Nel caso di valvole ideali un modo particolarmente semplice di realizzare tale distribuzione (con bassa frequenza di commutazione fc delle valvole fc = f ) consiste nell'imporre che la
tensione di polo (quella misurata tra i morsetti a,b,c del carico ed il polo N centro della tensione
continua) sia un sistema trifase simmetrico di onde quadre va,b,cN , si veda la Figura 10.74a. Per
ottenere questo risultato la valvola T1 della fase a sarà chiusa per il tempo T /2 = 1/(2f ) (mentre
T4 sarà aperta), nel secondo semiperiodo T4 sarà chiusa mentre T1 sarà aperta. I comandi relativi
alle fasi b,c saranno ordinatamente sfasati di T /3 e di 2T /3 .
Con questa scelta le tensioni concatenate vab , vbc , vca (ottenute per dierenza tra due successive
tensioni di polo) assumono l'andamento temporale indicato in Figura 10.74b. La tensione vGN
tra il centro teorico del carico G ed il polo N si calcola come è indicato nella (10.50) ed assume
l'andamento temporale indicato in Figura 10.74c. Inne le tensioni di fase riferite al centro teorico
va,b,cG si valutano come è indicato nella (10.51): esse variano nel tempo come è indicato nella
Figura 10.74c. Si tratta della così detta onda a sei gradini il cui valore massimo è indicato nella
(10.52).
vGN = (vaN + vbN + vcN )/3
vaG = vaN − vGN
vbG = vbN − vGN
Vs =
2
U
3
vcG = vcN − vGN
(10.50)
(10.51)
(10.52)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
(a)
239
(b)
(c)
Figura 10.74: Forme d'onda delle tensioni generate da un convertitore bistadio (inverter) trifase
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
240
Le tensioni di polo sono sviluppabili in serie di Fourier come è indicato nella (10.53) (dove
α = ωt ed ω è la pulsazione fondamentale): nello sviluppo compaiono l'armonica fondamentale e
tutte le armoniche dispari le cui ampiezze sono indicate in (10.54).
vaN =
2
U · [sin α
π
1
+ sin 3α
3
1
+ sin 5α
5
vbN =
2
U · [sin(α − 2π/3)
π
1
1
+ sin 3(α − 2π/3) + sin 5(α − 2π/3)
3
5
+...]
vcN =
2
1
1
U · [sin(α − 4π/3) + sin 3(α − 4π/3) + sin 5(α − 4π/3)
π
3
5
+...]
+...]
(10.53)
2U
∀k dispari
(10.54)
kπ
Le (10.53) evidenziano che: i) le tre terze armoniche sono tra loro in fase (costituiscono una
terna omopolare) ed altrettanto avviene per le armoniche di ordine multiplo di tre, ii) la terna
di prima armonica è diretta (la tensione della fase b è in ritardo rispetto a quella della fase a) ed
altrettanto avviene per le armoniche dispari di ordine k = 6H + 1 con H = 0, 1, 2, . . . ; la terna di
quinta armonica è inversa (la tensione di fase b è in anticipo su quella della fase a) ed altrettanto
avviene per le armoniche dispari di ordine k = 6H − 1 con H = 1, 2, 3, . . . .
Lo sviluppo in serie delle tensioni concatenate si ottiene per dierenza tra gli sviluppi di due
tensioni
√ di polo (dalle concatenate scompaiono le terze armoniche e relative multiple; le ampiezze
sono 3 volte quelle di fase). Lo sviluppo in serie di Fourier dello spostamento vGN del centro
teorico rispetto al polo è poi indicato nella (10.55): tale tensione è costituita da tutte le armoniche
multiple di tre presenti nelle tensioni di polo che risultano quindi assenti nelle tensioni di fase
riferite al centro teorico, si veda la (10.56).
µ
¶
2
1
1
vGN = U
sin 3α + sin 9α + . . .
(10.55)
π
3
9
VkM =
vaG =
2
U · [sin α
π
1
+ sin 5α
5
1
+ sin 7α
7
vbG =
2
U · [sin(α − 2π/3)
π
1
1
+ sin 5(α − 2π/3) + sin 7(α − 2π/3) + . . . ]
5
7
vcG =
2
U · [sin(α − 4π/3)
π
1
1
+ sin 5(α − 4π/3) + sin 7(α − 4π/3) + . . . ]
5
7
+...]
(10.56)
Un modo particolarmente ecace di descrivere il funzionamento del sistema bistadio di Figura
10.73 è quello di fare riferimento al sistema di bipoli ideali indicato nella Figura 10.75. Gli
interruttori di ogni ramo (fase) dell'inverter possono collegare il morsetto di fase a, b, c o al polo
positivo (indicato dal numero 1) oppure al polo negativo (indicato dal numero 0): quindi lo stato
di ogni ramo è descritto dal numero che identica la connessione al generatore di tensione costante
posto a monte dell'inverter.
I sei stati 1-6 di funzionamento attivo dell'inverter che danno luogo, per ogni sesto di periodo,
alle tensioni di fase va,b,cG (si veda la Figura 10.74) sono descritti dalle terne di numeri binari
indicate nella Tabella 10.2. A questi sei stati se ne aggiungono altri due ammissibili con tensioni
di fase nulle corrispondenti ad interruttori di fase tutti chiusi sul polo 0 (stato 0) oppure sul polo
1 (stato 7).
Le tensioni di fase va,b,cG corrispondenti agli stati di Tabella 10.2 possono essere rappresentate
tramite la nozione di fasore come è indicato nella (10.57) ed i sei fasori corrispondenti agli stati
attivi sono quelli indicati in Figura 10.76. La Figura 10.77 evidenzia poi una proprietà di notevole
interesse nelle successive applicazioni: gli stati dispari possono transitare allo stato 1 a tensione
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
241
Figura 10.75: Circuito equivalente convertitore bistadio
Tabella 10.2: Stati di funzionamento di un inverter trifase (tensioni riferite al centro teorico)
Stato
Stato interruttori
Tensioni di fase a,b,c
0
1
2
3
4
5
6
7
000
100
110
010
011
001
101
111
0, 0, 0
2U/3, −U/3, −U/3
U/3, U/3, −2U/3
−U/3, 2U/3, −U/3
−2U/3, U/3, U/3
−U/3, −U/3, 2U/3
U/3, −2U/3, U/3
0, 0, 0
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
242
Figura 10.76: Fasori rappresentativi della tensione negli stati attivi del convertitore
nulla con una sola commutazione, mentre gli stati pari transitano con una sola commutazione allo
stato 7 a tensione nulla.
r
va,b,cG =
2
<
3
"r
#
2
2
(va + αvb + α vc ) = <a,b,c (v̄)
3
v̄ =
2 jk π
Ue 3
3
k = 0, 1, 2, . . .
(10.57)
La descrizione sopra indicata consente anche di denire un semplice modo di comandare le
valvole. Infatti si supponga di conoscere il sistema trifase simmetrico di tensioni alternate sinusoidali desiderato ai morsetti del carico del tipo indicato nella (10.58). Il sistema di tensioni a sei
gradini la cui componente fondamentale coincide con il sistema desiderato presenta una tensione
continua a monte dell'inverter legata a VM dalla relazione VM = 2U/π ed i comandi per realizzare
l'onda a sei gradini si possono ottenere con il metodo indicato in Figura 10.78. Il piano complesso
viene diviso in sei sestanti di 60◦ e quando il fasore v̄1 indicato nella (10.59) si trova nel sestante di
competenza di uno dei sei stati attivi v̄ , di cui alla (10.57), si comanda la chiusura degli interruttori
di quello stato indicata in Tabella 10.2.
2
va,b,c = VM sin(ωt + k π)
3
k = 0, 1, 2, . . .
(10.58)
2 jωt
Ue
(10.59)
π
Le relazioni (10.56) (oltre alla complicazione del doppio convertitore) evidenziano il principale
inconveniente del sistema bistadio di cui alla Figura 10.73: il contenuto armonico delle tensioni
di fase è elevato e la frequenza delle prime armoniche è prossima a quella della fondamentale. In
particolare se il carico è un motore trifase le correnti generate dalle tensioni di quinta armonica
generano un campo magnetico rotante in senso inverso alla velocità −5ω/n (dove n è il numero
delle paia di poli) che, interagendo con il campo principale diretto rotante a velocità ω/n, dà
v̄1 = VM ejωt =
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
243
Figura 10.77: Transizioni allo stato nullo raggiungibili con una sola commutazione
luogo ad una coppia armonica di pulsazione 6ω ; in modo analogo il campo magnetico generato
dalle corrrenti di settima armonica che ruota in senso diretto con velocità 7ω/n, interagendo
con il campo principale dà luogo ancora ad una coppia pulsante di pulsazione 6ω (i campi 11
e 13 danno luogo per lo stesso motivo a coppie pulsanti di pulsazione 12ω e così via). Se la
pulsazione ω è bassa allora le pulsazioni 6Kω rientrano nell'ordine di grandezza delle pulsazioni
di risonanza meccanica (le frequenze in questo caso variano tra qualche [Hz] e qualche decina di
[Hz]): possono quindi innescarsi delle oscillazioni incompatibili per il corretto funzionamento del
sistema elettromeccanico che viene azionato dal motore.
Viene nel seguito dimostrato che se la frequenza massima di commutazione delle valvole è molto
maggiore della frequenza di funzionamento e delle frequenze di risonanza meccanica è possibile,
con metodi di PWM, mantenere costante la tensione a monte dell'inverter (quindi azionamento
monostadio), modulare la ampiezza della componente fondamentale della tensione ai morsetti del
motore e conseguire componenti armoniche signicative la cui frequenza minima è dell'ordine di
grandezza della frequenza massima di commutazione (evitando così il campo delle frequenze di
risonanza meccanica).
10.11.1
Modulazione della ampiezza degli impulsi di tensione con il
metodo della sotto-oscillazione (modulazione naturale).
Si consideri una onda triangolare (onda portante) di ampiezza vtM e di frequenza ft dello stesso
ordine di grandezza della frequenza massima di commutazione delle valvole impiegate (con un
opportuno margine tenuto conto del sistema di rareddamento) ed un sistema trifase simmetrico
di tensioni (onde modulanti) di ampiezza vsM e di frequenza fs e si introducano gli indici di
modulazione m in ampiezza ed in frequenza mf indicati nella (10.60).
m=
vsM
vtM
mf =
fs
ωs
=
ft
ωt
(10.60)
Se m ≤ 1 e se la pendenza dei fronti del triangolo è opportunamente maggiore di quella massima
delle sinusoidi allora le tensioni di fase rispetto al polo N di Figura 10.75, costruite assegnando
il valore U/2 se la tensione della sinusoide è maggiore di quella del triangolo e −U/2 in caso
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.78: Sestanti per il comando delle commutazioni dell'onda a sei gradini
Figura 10.79: Costruzione della tensione di fase
244
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
245
Figura 10.80: Funzioni di Bessel di ordine 0 e 1
contrario (si veda la Figura 10.79), rispondono allo sviluppo in serie indicato nella (10.61) (che si
riferisce alla tensione va , gli sviluppi in serie delle tensioni vb e vc sono sfasati in ritardo di 2π/3
e 4π/3). Metodi di modulazione della tensione che sfruttano strategie analoghe vengono detti a
modulazione di ampiezza d'impulso (o anche metodi PWM -Pulse Width Modulation)
∞
U
2 X1
v(t) = m sin(ωs t) + U
2
π r=1 r
(
)
∞
X
Jq (rπm/2)S(r + q) sin[(rmf + q)ωs t + ϕ]
(10.61)
q=−∞
½
S(r + q) =
0
1
∀(r + q) pari
∀(r + q) dispari
(10.62)
Il termine S(r + q) è precisato nella (10.62) (esistono quindi i termini con r pari e q dispari e
viceversa), mentre Jq è la funzione di Bessel di ordine q . Le funzioni di Bessel sono le soluzioni
della (10.63) dove n è un numero reale. In particolare le soluzioni corrispondono sia a Jn (x),
sia a J−n (x) e per n intero si possono esprimere come è precisato nella (10.64). Dalla (10.64) si
deduce che valgono le proprietà di simmetria indicate nella (10.65) e la formula ricorsiva (10.66)
che consente di ricavare le funzioni di ordine qualsiasi a partire dalle J0 (x) e J1 (x) il cui andamento
è indicato nella Figura 10.80.
x2
Jn (x) =
dy 2
dy
+x
+ (x2 − n2 )y = 0
dx2
dx
xn
x2
x4
−
+
+ ...
2n n! 22 n!(n + 1) 24 n!(n + 1)(n + 2)
J−n (x) = (−1)n Jn (x)
Jn (−x) = (−1)n Jn (x)
2n
Jn (x) − Jn−1 (x)
x
Lo sviluppo (10.61) si presta ai seguenti commenti.
Jn+1 (x) =
(10.63)
(10.64)
(10.65)
(10.66)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
246
Figura 10.81: Incremento dell'indice di prestazione M mediante l'uso di una terza armonica
• Sono presenti inniti termini e oltre a quello di pulsazione ωs compaiono quelli di pulsazione
(rωt + qωs ) dove r è intero positivo e q è intero positivo e negativo (di solito si rappresentano
i termini in gruppi caratterizzati dallo stesso valore di r) con (r + q) dispari.
• Nello spettro delle frequenze, i termini di ogni gruppo sono disposti simmetricamente rispetto
alla pulsazione rωt , multipla intera della pulsazione della portante. Ogni gruppo contiene
termini non nulli alternati a termini nulli. L'ampiezza dei termini non nulli è inversamente
proporzionale a r e direttamente proporzionale a Jq (rπm/2).
• L'ampiezza dei termini non nulli di un gruppo diminuisce al crescere di q .
• La fase di tutti i termini è proporzionale a q .
• Una modulazione con mf razionale è detta sincrona e produce una tensione periodica. Una
modulazione con mf irrazionale si dice asincrona e produce una tensione aperiodica. Se mf
è intero le armoniche hanno pulsazione nω con n intero ed alla ampieza concorrono tutte
le armoniche per le quali (rmf + q) = n. Qest'ultima equazione ha soluzione anche per
n = 0 quindi esiste una componente continua che non è ammissibile per la alimentazione
di motori dato che tale componente comporta correnti che saturano il circuito magnetico e
creano coppie pulsanti.
• La componente continua è assente per mf intero dispari, inoltre se mf è un multiplo di tre
le tensioni di fase sono simmetriche alternate non sinusoidali.
• Per mf > 9, la componente fondamentale ha ampiezza mU/2 con un errore, dovuto da
termini per i quali (rmf +q = 1, inferiore al 5% ed il controllo della componente fondamentale
può essere conseguito con legge lineare al variare di m tra zero ed uno.
• Per mf > 9, le armoniche più signicative sono quelle di pulsazione ωt e (ωt − 2ωs ). Occorre
che la frequenza armonica più bassa (ft − 2fs ) non interferisca con quelle di risonanza
meccanica.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
247
• Al crescere della fs richiesta all'inverter occorre che ft = mf fs sia sempre minore della
massima frequenza di commutazione delle valvole fcM . Questo risultato può richiedere che
mf venga ridotto al crescere di fs ; in tal caso occorre prestare particolare attenzione alla
transizione tra due regolazioni con diverso valore di mf : per evitare brusche variazioni della
tensione applicata occorre conservare durante la transizione la componente fondamentale
della tensione in modulo e fase. Ad esempio se fsM = 200 [Hz] e fcM = 3 [kHz], è possibile
impiegare mf = 21 no a circa fs = 150 [Hz] dopo di che occorre scendere a mf = 15.
• Nel funzionamento con onda a sei gradini l'ampiezza massima della componente fondamentale è V6M = 2U/π = 0.634U , mentre nel caso di modulazione sinusoidale l'ampiezza massima è VsM = U/2 = 0.5U . Questo signica che, a pari corrente manipolata dalle valvole,
un azionamento monostadio con modulazione sinusoidale può fornire in regime lineare di
regolazione della componente fondamentale di tensione, una potenza ridotta nel rapporto
M = VsM /V6M = π/4 = 0.785 rispetto all'azionamento bistadio di cui alla Figura 10.73: è
evidente l'utilità di mettere a punto metodi che consentano di avvicinare l'indice di prestazione M tipico del metodo di modulazione all'unità e cioè che consentano di realizzare, nel
modo il più possibile lineare, la transizione dalla modulazione sinusoidale al funzionamento
con onda a sei gradini.
• Nel caso di modulazione sinusoidale la sovramodulazione porta (come nel caso monofase)
alla transizione in onda quadra ma il legame tra m e VsM è fortemente non lineare ed il
contenuto armonico è particolarmente elevato.
• Nel caso di modulazione naturale è possibile incrementare l'indice di prestazione M modicando il sistema trifase simmetrico di tensioni mediante l'aggiunta di un sistema di tensioni trifase di sequenza zero (ad esempio una armonica di frequenza 3fs , si veda la Figura
10.81, che introduce una terza armonica nelle tensioni di fase ma non nelle concatenate e
nelle tensioni di fase riferite al centro teorico). In questo modo la modulante a frequenza
fs può assumere ampiezza maggiore della portante senza che l'ampiezza complessiva della
modulante ecceda quella della portante. Si può dimostrare che quando la terza armonica
ha ampiezza√V3M = vt /6 allora l'ampiezza della modulante
di frequenza fs può arrivare a
√
V1M = 2vt / 3 ed in questa situazione
V
=
U/
3
e
l'indice
di prestazione avrebbe il
sM
√
valore M0 = VsM /V6M = π/(2 3) = 0.907.
Il metodo della sotto-oscillazione è semplice da implementare usando circuiti analogici con buoni
risultati anche per frequenze dell'ordine della decina di [kHz]. Nel caso delle tecniche digitali
sono disponibli microcontrollori dotati di unità programmabili che, avendo in ingresso i dati della
portante e della modulante, sono in grado di fornire direttamente gli istanti di commutazione per
le tre fasi dell'inverter.
10.11.2 Modulazione della larghezza degli impulsi mediante il metodo
dei fasori spaziali
La forma d'onda ottimale da conseguire per la prima armonica delle tensioni di fase (riferite al
centro teorico) utilizzando al meglio valvole con frequenza massima di commutazione fcM (e con
tensione massima, dedotta con opportuni margini da quella nominale, pari alla tensione U a monte
dell'inverter) è quella di una terna trifase simmetrica rapprentabile con un fasore rotante del tipo
indicato nella (10.67). L'ampiezza VM delle tensioni deve rispondere alla condizione (10.68) perchè
al più l'inverter può funzionare erogando l'onda a sei gradini di ampiezza 2U/3.
v̄ = VM ejωt
VM ≤
ω = 2πf
2
U
π
(10.67)
(10.68)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
248
Figura 10.82: Costruzione della tensione in uscita dal convertitore
Fissata la frequenza di campionamento f0 = 1/T0 (dell'ordine della massima frequenza di
commutazione) del fasore v̄ al meglio si può operare secondo quanto segue:
• Considerato il valore v̄(kT0 ) da realizzare nel tempo kT0 < t < (k + 1)T0 si costruirà una
tensione ū in uscita dall'inverter il cui valore medio nel periodo T0 soddis alla (10.69):
1
v̄(kT0 ) =
T0
Z
(k+1)T0
(10.69)
ūdt
kT0
• Si realizzerà la tensione ū di cui alla (10.69) con il minimo numero di commutazioni.
E' possibile soddisfare alle due condizioni prima indicate se costruiamo il fasore ū come è
indicato nella (10.70) e nella Figura 10.82 nella quale si è supposto che v̄(kT0 ) si trovi nel sestante
compreso tra ū1 ed ū2 . Considerati cioè gli otto stati possibili di funzionamento di Figura 10.77,
si utilizzano per la costruzione di ū i due stati attivi contigui al fasore v̄(kT0 ) oltre ai due stati
(0 e 7) nulli (indicati cumulativamente nella (10.70) con ū∗0 ). Dalla (10.70) si deduce la (10.71) e
risolvendo il sistema nelle due incognite t1 e t2 si ricava la soluzione del problema indicata nella
(10.72).
T0 v̄(kT0 ) = ū1 t1 + ū2 t2 + ū∗0 t0
·
T0 v(kT0 )
cos γ
sin γ
¸
·
= t1 U1
1
0
¸
·
+ t2 U2
cos(π/3)
sin(π/3)
¸
Uk = 2U/3 = πV6M /3
√
v(kT0 ) sin(π/3 − γ)
2 3
t1
=
=M
sin(π/3 − γ)
T0
Uk sin(π/3)
π
√
t2
2 3
=M
sin γ
T0
π
t0 = T0 − t1 − t2
(10.70)
M=
(10.71)
v(kT0 )
V6M
(10.72)
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
249
Figura 10.83: Successione di comandi e tensioni di polo nell'intevallo di tempo 2T0
Quando poi v̄(kT0 ) si trova nel sestante successivo i tempi t1 e t2 si riferiscono alle tensioni ū2
ed ū3 e l'asse reale è posto su ū2 (e così via).
[(000) ×
t0
t0
t0
t0
; (100) × t1 ; (110) × t2 ; (111) × ][(111) × ; (110) × t2 ; (100) × t1 ; (000) × ] (10.73)
2
2
2
2
Una volta calcolati i tempi di applicazione dei fasori u¯1 , ū2 , ū∗0 allo scopo di minimizzare le
commutazioni si può realizzare, ad esempio, il ciclo di transizioni indicato nella (10.73) in cui
accanto ad ogni fasore è indicato il tempo di applicazione al motore. Con questa sequenza di
comandi mantenendo costante v̄(kT0 ) per l'intervallo 2T0 le valvole compiono un ciclo di commutazione ogni 2T0 (In Figura 10.83 è indicata la successione dei comadi e il valore delle tensioni di
polo nel tempo 2T0 ).
Si noti che allo scopo di ridurre il contenuto armonico della tensione in uscita dall'inverter è
opportuno che vi sia una sincronizzazione tra la frequenza di campionamento f0 e la frequenza
f della tensione modulante v̄ , in particolare quando l'indice di modulazione in frequenza diventa
ridotto (mf = f0 /f < 30). Conviene quindi che sia soddisfatta la (10.74) dove fCLK è la frequenza
di clock ed nc (numero intero) è la risoluzione con cui viene sondato il periodo T0 . La (10.74)
comporta che fCLK possa raggiungere i [MHz].
fCLK = nc mf f
(10.74)
Il
congruenti
no a che M ≤
√ sistema di equazioni (10.72) fornisce per t1 , t2 , t0 soluzioni
√
√
π/2 3 = 0.907 = M0 quindi no a che v(kT0 ) = πV6M /2 3 = U/ 3 = v ∗ , si veda la Figura
10.82. In altri termini per avere soluzioni congruenti occorre che v̄ si muova√dentro la circonferenza
iscritta nell'esagono denito ai fasori ūk . Infatti quando M = M0 = π/2 3 se γ = (2k + 1)π/6
allora t1 = t2 = T0 /2 e t0 = 0, mentre quando M > M0 nell'intorno di γ = (2k + 1)π/6 si
troverebbe che t1 + t2 > T0 e questo comporterebbe l'assurdo di t0 < 0. Ne consegue che quando
v̄ deborda dalla circonferenza iscritta nell'esagono occorra cambiare strategia nella modulazione
degli impulsi.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
250
Figura 10.84: Andamento della tensione di fase quando v̄ si muova sull'esagono (a) oppure a scatti
di T/6 (b)
Figura 10.85: Modica del riferimento v̄ nel caso di sovramodulazione
E' possibile ottenere un indice M > M0 se si modica opportunamente il fasore di riferimento
v̄ (di ampiezza costante e rotante con velocità angolare costante ω0 ) e le tappe di questa modica
si possono intuire dalle seguenti considerazioni.
• Se il fasore di riferimento v̄ seguisse in modo continuativo la traiettoria costituita dall'esagono
denito dai fasori ūk con velocità angolare ω = 2π/T costante (nel seguito indicheremo
con v̄1 questo particolare riferimento) allora la tensione di fase vaG varierebbe nel tempo
come è indicato con la curva a nella Figura 10.84 e la prima armonica di questa tensione
presenterebbe un indice di prestazione M1 = 0.952. Se ne conclude che per il campo 0.907 <
M < 0.952 (primo campo di sovramodulazione) occorre trasformare (avvalendosi di un
opportuno processore P di segnale, si veda la Figura 10.85) progressivamente v̄ da un fasore
di ampiezza costante che si muove con velocità angolare costante su una circonferenza ad un
fasore v̄ ∗ che si muove sull'esagono alla stessa velocità angolare.
• Se il fasore di riferimento si spostasse in modo discontinuo ogni T /6 su un vertice dell'esagono
allora l'onda vaG sarebbe quella indicata con b) nella Figura 10.84 (onda a sei gradini) e
l'indice di prestazione sarebbe M2 = 1 (il massimo possibile). Quindi nel campo denito da
0.952 < M < 1 (secondo campo di sovramodulazione) il processore P dovrebbe modicare
progressivamente il riferimento v̄ dall'esagono percorso in modo continuo a velocità angolare
ω no alla sequenza discreta di comandi dell'onda a sei gradini (quindi nell'avanzamento a
scatti di π/3 del riferimento v̄ ∗ posto di ampiezza pari a Uk ).
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
Figura 10.86: Andamento della traettoria di v̄ nel caso di sovramodulazione
Figura 10.87: Angolo di mantenimento γm in funzione dell'indice di prestazione M
251
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
252
Figura 10.88: Forme d'onda della tensione di fase al crescere dell'indice di prestazione M
Nel primo campo di sovramodulazione la traiettoria del fasore di riferimento v̄ , tratteggiata
nella Figura 10.86, viene modicata in modulo ma non in fase in funzione dell'indice di prestazione
M = v/V6M come è indicato con la linea in grassetto (che rappresenta la traiettoria del fasore v̄ ∗ in
uscita dal processore di Figura 10.85): la circonferenza viene sostituita da un arco di esagono B-C
e da due archi di circonferenza A-B e C-D, in prossimità dei vertici dell'esagono, che si riducono
progressivamente al crescere di M e che scompaiono quando M = M1 .
Sugli archi A-B e C-D, v̄ ∗ viene realizzato tramite le indicazioni fornite dalle (10.72)-(10.73),
nell'arco B-C, v̄ ∗ viene realizzato usando ū1 per il tempo t1 ed ū2 per il tempo t2 (scompare il
tempo t0 ) ed i tempi si valutano come è indicato nelle (10.75).
t2 = T0
sin γ
sin(γ + π/3)
√
3 cos γ − sin γ
t1 = T0 − t2 = T0 √
3 cos γ + sin γ
(10.75)
Per M1 < M ≤ 1 il fasore di riferimento v̄ viene modicato in modulo e fase ed il fasore v̄ ∗ in
uscita dal processore P di Figura 10.85 presenta modulo e fase che dipendono dal valore di M e
dalla fase di v̄ ed il processo per il primo sestante è quello nel seguito indicato.
Il fasore v̄ ∗ viene mantenuto fermo sullo spigolo 1 ntanto che l'angolo di fase γ del fasore v̄
non supera un opportuno valore γm (detto angolo di mantenimento), crescente con M come è
indicato nella Figura14 (quindi γ ∗ = 0 per 0 ≤ γ ≤ γm ). A partire da questo istante v̄ ∗ si muove
sull'esagono e l'angolo che individua la posizione sull'esagono è quello precisato dalla 1.24 (quindi
γ ∗ varia proporzionalmente a γ ma non coincide con se non nella posizione γ = π/6) ed i tempi di
comando t1 , t2 dei fasori ū1 , ū2 sono individuati dalle (10.75) sostituendo γ ∗ a γ . Quando inne
π/3 − γm ≤ γ ≤ π/3 allora γ ∗ = π/3.
In denitiva con la tecnica ora indicata al crescere di M , il fasore di riferimento v̄ ∗ nisce
progressivamente per muoversi a scatti sempre più ampi e quando M = 1 lo scatto diventa di π/3
non appena v̄ supera il sestante di competenza del fasore ūk . La forma d'onda della tensione di
fase riferita al centro teorico si modica allora al crescere di M come è indicato nella Figura 10.88.
Complessivamente la modulazione della larghezza di impulso basata sui fasori spaziali può coprire
tutta la gamma delle tensioni alternate trifasi simmetriche conseguibili con valvole caratterizzate
da una certa tensione nominale.
CAPITOLO 10. I CONVERTITORI PER AZIONAMENTI
γ∗ = 0
γ∗ =
π γ − γm
6 π/6 − γm
γ ∗ = π/3
253
0 ≤ γ ≤ γm (M )
γm < γ ≤ π/3 − γm
π/3 − γm < γ ≤ π/3
(10.76)