Sensori di corrente
Il modo più semplice di eseguire la misura di corrente è il metodo volt-amperometrico, in cui si
misura la caduta di tensione su di una resistenza di misura percorsa dalla corrente incognita.
Questo metodo molto semplice
p
ep
poco preciso
p
è utilizzato in p
pratica solo p
per realizzare protezioni
p
dei
dispositivi elettronici di potenza e sistemi di controllo della corrente.
Risulta però inefficace per misurare correnti molto elevate, per l’eccessiva dissipazione di potenza e
per le variazioni di resistività indotte dall’autoriscaldamento sulla resistenza di sensing.
Sensori di corrente
Alcuni dispositivi elettronici di potenza possiedono un pin supplementare per misurare la corrente
che attraversa il dispositivo con il metodo volt-amperometrico secondo il metodo dello specchio di
corrente. Internamente il pin supplementare è connesso ad alcune centinaia delle migliaia o decine di
migliaia di celle elementari in parallelo che compongono il dispositivo.
dispositivo
La corrente misurabile ai capi del pin di sensing è proporzionale alla corrente che attraversa il
dispositivo, ma molto più piccola, in quanto il rapporto di proporzionalità è dato dal rapporto tra le
celle elementari connesse al pin di sensing ed il totale delle celle elementari.
elementari
Si risolve il problema dell’autoriscaldamento perché la corrente che attraversa la resistenza di
sensing
g è molto piccola.
p
La misura ottenuta è però
p
in genere
g
poco
p
precisa
p
ed in pratica
p
utilizzabile
solo per realizzare protezioni a soglia per sovracorrente.
Trasformatore di corrente (TA)
I TA sono trasformatori riduttori di corrente e si adoperano ogni qualvolta si deve misurare una
corrente alternata superiore a qualche decina di Ampere. La corrente di secondario è proporzionale a
quella di linea ma molto più piccola (I2=N1/N2 I1) e può quindi essere facilmente misurata.
Il primario di un TA è connesso in serie alla rete, quindi è attraversato dalla corrente di linea. Per
limitare la dissipazione di potenza i TA devono presentare al primario un’impedenza idealmente nulla.
Ciò è ottenuto con opportuni accorgimenti costruttivi e facendoli funzionare sempre col secondario in
corto circuito, o più precisamente chiuso su un amperometro, che ha un’impedenza interna
praticamente nulla.
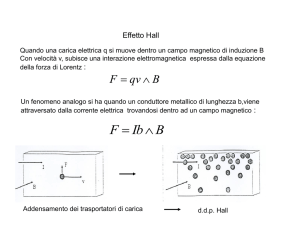
Sensori di corrente ad effetto Hall
Per la misura di correnti elevate si utilizzano sensori isolati ad effetto Hall.
Rispetto ai TA, che
operano tra i 40 ed i 60 Hz, sono in grado di misurare correnti in uno spettro di frequenze molto più
ampio, che va dalla continua fino a 150 kHz.
Per effetto Hall viene generata una tensione V, proporzionale al campo magnetico H, quando su un
elemento metallico sensibile scorre una corrente I. Tale tensione ha direzione perpendicolare sia al
verso di scorrimento della corrente che alla direzione del campo magnetico.
I sensori di corrente ad effetto Hall possono essere di due tipi:
A misura diretta, dove si effettua una misura della tensione prodotta per effetto Hall dalla
corrente incognita.
A compensazione di campo, in tal caso si induce in un circuito elettrico una corrente
proporzionale a quella incognita ma di minore intensità,
intensità misurandola poi con un circuito a
misura diretta.
Sensori di corrente ad effetto Hall
Sensori di corrente a misura diretta del campo.
Il circuito magnetico è costituito da un nucleo toroidale aperto, di ferrite o di altro materiale
f
ferromagnetico.
ti
Nell’apertura
N ll’
t
è alloggiato
ll
i t il sensore ad
d effetto-Hall
ff tt H ll sull quale
l il nucleo
l
toroidale
t
id l
concentra il campo magnetico generato dalla corrente elettrica incognita Im.
Att
Attraverso
il sensore viene
i
fatta
f tt passare una piccola
i
l corrente
t Iref che,
h accoppiandosi
i d i con il campo
magnetico genera per effetto Hall una tensione Vout proporzionale alla corrente Im.
Sensori di corrente ad effetto Hall
Sensori a compensazione di campo.
L struttura
La
t tt
generale
l è simile
i il a quella
ll del
d l sensore a misura
i
diretta,
di tt con la
l differenza
diff
che
h sull nucleo
l
toroidale è posto un avvolgimento con n2 spire pilotato dall’uscita dell’amplificatore (circuito
secondario).
All’ingresso dell’amplificatore è presente la tensione V generata per effetto Hall dalla interazione tra i
campi magnetici generati dalla corrente da misurare
nell’avvolgimento posto sul nucleo toroidale.
Im e dalla corrente I2
che circola
Sensori di corrente ad effetto Hall
L’uscita dell’amplificatore pilota un generatore di corrente che fa scorrere la corrente I2
sull’avvolgimento secondario. L’avvolgimento è fatto in modo tale che la corrente I2 generi un campo
magnetico che si oppone a quello generato dalla corrente incognita Im. La tensione V è nulla se i due
campi magnetici sono in equilibrio, vale a dire se:
Il sensore si comporta quindi come un circuito di controllo a retroazione, che tende ad annullare la
tensione V agendo sulla corrente I2. In condizione di stabilità si ha (per n1=1):
Il problema è riportato alla misura della corrente I2 che è n2 volte più piccola della corrente originaria,
e quindi facilmente misurabile anche con il metodo volt-amperometrico.
Questo secondo schema risulta leggermente più complesso del precedente per la presenza
dell’avvolgimento secondario. Tuttavia esso è preferibile e globalmente non risulta più costoso in
quanto consente di utilizzare il sensore ad effetto di Hall nell’intorno
nell intorno della regione di campo nullo
nella quale la linearità ègarantita anche con dispositivi di classe relativamente economica.
Sensori di Prossimità e sensori Logici
I sensori di prossimità o di presenza sono realizzati in modo da fornire informazioni di tipo logico,
utilizzate per il controllo e la supervisione delle sequenze operative e delle condizioni di
funzionamento del sistema produttivo.
Il rivelatore di soglia è caratterizzato da una certa isteresi, per migliorare la stabilità dell’uscita
nell’intorno
ll’i t
d
dell punto
t di commutazione.
t i
C
Caratteristiche
tt i ti h qualitative
lit ti di un sensore logico
l i
di prossimità
i ità
sono:
ll’ampiezza
ampiezza della banda d
d’isteresi
isteresi
la massima frequenza di commutazione dell’uscita
l’estensione del campo d’azione
Si distinguono sensori di posizione e prossimità con generatori di:
campo magnetico (contatto Reed, effetto Hall)
campo luminoso
campo acustico (ultrasuoni)
Sensori di prossimità a Contatto Reed
I sensori di prossimità a Contatto Reed sono costituiti da lamine di materiale ferromagnetico (FerroNichel) a bassa riluttanza racchiuse da un bulbo di vetro contenente gas inerte.
Il campo magnetico generato da un magnete permanente o da bobine percorse da corrente, in
prossimità del bulbo, induce sulle lamine polarità magnetiche di segno opposto.
L due
La
d
lamine
l i
tendono
t d
ad
d avvicinarsi
i i
i o allontanarsi,
ll t
i a seconda
d della
d ll metodologia
t d l i costruttiva
t tti
(Contatto Normalmente Aperto o Normalmente Chiuso), chiudendo o aprendo un circuito elettrico.
Sensori di prossimità a Contatto Reed
La realizzazione in un bulbo di vetro garantisce ai contatti un buon livello di protezione da polveri e
umidità.
Tuttavia, poiché il funzionamento del sensore è basato sull’elasticità delle lamine, il tempo di vita
medio, è relativamente limitato (approssimativamente 108 operazioni).
Occorre fare attenzione ai livelli di tensione o corrente del circuito nel quale il sensore a contatto
Reed viene inserito, in quanto valori elevati possono provocare l’incollamento dei contatti e, di
conseguenza, una riduzione tempo di vita.
Gli effetti di rimbalzo in seguito alla chiusura del contatto, limitano la frequenza massima di
attivazione.
Sensori di posizione ad effetto Hall
Un sensore di posizione ad effetto Hall è composto dall’elemento sensibile e da un magnete.
L’intensità del campo magnetico si riduce (secondo una relazione non lineare) con l’aumentare della
distanza del magnete dal sensore Hall, così come la tensione generata. Se la tensione generata dal
sensore ad effetto Hall è utilizzata per pilotare un rivelatore di soglia con isteresi, (Trigger di Schmitt),
si ottiene un’uscita alta se il magnete si avvicina oltre la distanza di azionamento, altrimenti bassa.
I sensori ad effetto Hall si prestano ad una moltitudine di applicazioni, hanno un costo limitato,
elevata
l
t frequenza
f
di lavoro
l
(oltre
( lt 25 kHz)
kH ) e elevata
l
t linearità
li
ità neii confronti
f
ti di variazioni
i i i di temperatura
t
t
e tensione di alimentazione.
Sensori analogici di prossimità ad effetto Hall
Con un’adeguata configurazione realizzativa è possibile ottenere sensori ad effetto Hall con
caratteristica
tt i ti tensione/distanza
t
i
/di t
con buona
b
approssimazione
i
i
lineare
li
i un intorno
in
i t
dell’origine.
d ll’ i i
Se il guadagno in tale regione lineare non è troppo elevato (poli magnetici maggiormente distanziati),
si ottiene un sensore analogico di posizione
posizione, sebbene con campo di misura molto limitato.
limitato
Sensori di posizione rotativi ad effetto Hall
Esistono realizzazioni nelle quali i magneti sono disposti su un elemento in rotazione, è possibile in
tal caso ottenere Sensori di posizione ad effetto Hall rotativi ed inoltre:
sensori di posizione incrementali (encoder magnetici)
sensori analogici di velocità (misura frequenza segnale periodico).
dispositivi per il controllo della commutazione delle fasi nei motori “brushless” a campo
trapezoidale (sincroni, a magneti permanenti), nei quali occorre rilevare il passaggio del
magnete di rotore per le posizioni di commutazione.
Sensori di prossimità induttivi
Nei sensori di prossimità induttivi di tipo attivo, detti anche a correnti parassite, un circuito
oscillatore alimenta un solenoide avvolto su un nucleo di ferrite aperto, in modo tale da realizzare un
generatore di flusso magnetico con linee di flusso che influenzano il campo d’azione nel quale si
viene a trovare l’oggetto da rilevare, chiamato azionatore.
La presenza dell’azionatore, un qualunque oggetto con proprietà conduttive (in genere metallico) in
prossimità del solenoide, fa si che il campo magnetico induca delle correnti parassite sul corpo, a
causa delle quali parte della potenza del campo magnetico viene dissipato.
Sensori di prossimità induttivi
L’oscillatore è in grado di compensare le perdite solo se l’azionatore viene mantenuto ad una certa
distanza dal sensore, mantenendo costante l’ampiezza dell’oscillazione. Se l’azionatore si avvicina
oltre tale distanza l’oscillazione si smorza.
Se l’ampiezza dell’oscillazione, rilevata a valle di un filtro passa-basso e di un raddrizzatore da un
trigger con isteresi, diminuisce oltre la soglia impostata, il sensore porta l’uscita logica al livello alto.
Sensori di prossimità induttivi
Si può dimostrare che la perdita per effetto Joule e quindi lo smorzamento dell’oscillazione, dipende
dalla distanza dell’azionatore ed inoltre in modo:
linearmente proporzionale dallo spessore dell’azionatore;
quadraticamente proporzionale dalla superficie investita dal campo;
quadraticamente proporzionale dalla frequenza del campo magnetico generato;
inversamente proporzionale dalla resistività del materiale. (Si può ottenere maggiore sensibilità
del sensore con materiali maggiormente resistivi es. ferro dolce).
Sensori di prossimità capacitivi
Nei sensori di prossimità di tipo capacitivo l’elemento connesso ad un oscillatore è un condensatore
a facce piane e concentriche. Il dielettrico è costituito dall’aria e dall’oggetto azionatore. L’azionatore
può anche essere di materiale non metallico, liquido o solido.
L’oscillazione viene provocata dall’avvicinamento dell’oggetto. Infatti, in assenza di oggetti nelle
vicinanze, l'oscillatore LC non funziona per assenza della capacità. Quando un'oggetto si avvicina
nasce una capacità, il cui valore dipende dalla distanza dell’oggetto (per variazione dello spessore del
dielettrico (oggetti metallici) o variazione della costante dielettrica (oggetti non metallici)).
L'oscillatore inizia a funzionare e genera una tensione alternata che viene filtrata e raddrizzata.
Quando la tensione prodotta supera un determinato livello cambia lo stato del comparatore ad
isteresi in uscita.
Molto spesso questo principio viene sfruttato per la realizzazione di sensori di livello.
Sensori di prossimità ad ultrasuoni
I sensori ad ultrasuoni sfruttano la capacità di molti materiali di riflettere il suono.
La distanza d di un oggetto dal sensore viene determinata inviando un treno di impulsi acustici ad
alta frequenza ed analizzando il tempo di ritardo Tr nella ricezione degli impulsi riflessi dall’oggetto.
Ove Vc e è la velocità di propagazione delle onde acustiche e θ l’angolo relativo tra il trasmettitore e il
ricevitore.
Sensori di prossimità ad ultrasuoni
L’emissione di impulsi acustici si basa sull’effetto piezoelettrico inverso: ad un elemento (detto
“risuonatore”) di materiale cristallino viene applicato un segnale elettrico alternato, alla frequenza di
risonanza tipica
p
dell’elasticità meccanica del materiale.
La ricezione degli impulsi, invece, si basa sull’effetto piezoelettrico diretto, grazie al quale un cristallo
dello stesso materiale del risuonatore, sottoposto a sollecitazioni meccaniche, provocate dell’onda
acustica, oscillatorie ed alla sua frequenza di risonanza, produce un segnale elettrico analogo a
quello di alimentazione del trasmettitore.