")
PROGRAMMA COMMENTATO DEL CORSO DI FISICA DEI MATERIALI I (4 CFU)
per l’a.a. 2011/2012 (testo di riferimento: Gersten-Smith (GS))
Prof. Giorgio Benedek
Seminario introduttivo: vedi Introduction su questo sito
1. LA STRUTTURA DEI SOLIDI
Alcuni concetti generali:
-
Prima domanda: Se tutto è nato da progressiva solidificazione di un miscuglio informe di
atomi di quasi tutta la tavola di Mendeleiev, perché esistono in natura solidi cristallini
(atomici o molecolari) di struttura macroscopicamente ordinata e composizione (quasi)
omogenea? In altre parole: perché una struttura periodica ordinata è in generale favorita
rispetto a una disordinata, e perché eventuali impurezze sono presenti in generale in piccole
concentrazioni?
-
Seconda domanda: quando atomi o molecole libere cominciano ad aggregarsi, come si
sistemano? Secondo una struttura cristallina (cioè periodica ordinata) oppure hanno altre
strade possibili?
Prima risposta: vedi la teoria termodinamica dei difetti cristallini (vd. Cap. 4 del GS,
specialmente 4.6, e la seconda parte del corso di Chimica Fisica (Prof. Simona Binetti)).
Seconda risposta. Piccoli insiemi di atomi o molecole (con numeri da 2 a 102 105, quindi con
misure nanometriche) si chiamano cluster. Nei cluster dominano le forze di coesione di
superficie in quanto gli atomi alla (o prossimi alla) superficie sono una parte importante se non
preponderante del totale. Le forze di coesione di superficie tendono, come nei liquidi, a
minimizzare la superficie e quindi a conferire al cluster una forma il più possibile prossima alla
sfera. La sistemazione ordinata degli atomi rende le forme dei cluster poliedriche. I poliedri più
prossimi alla sfera sono gli icosaedri (massima simmetria puntuale). Perciò molti piccoli cluster
hanno questa forma. C’è però il problema che gli icosaedri hanno assi quinari, incompatibili con
l’ordine cristallino tridimensionale (la stessa ragione per cui non si può ricoprire un pavimento
piano con solo piastrelle pentagonali regolari, mentre si potrebbe ricoprire una sfera: anzi ne
bastano 12!)
Quando il numero di atomi (o molecole) cresce e le forze di volume diventano preponderanti
sulle forze di superficie scatta l’interesse per la struttura cristallina (ordine a lungo range) a
scapito dell’alta simmetria puntuale (alto ordine locale, ma a corto range). In generale si parla
di simmetrie in competizione. Il conflitto di simmetrie può risolversi in diverse forme di
compromesso, ad esempio:
a) conciliare l’alta simmetria puntuale con un ordine a lungo range solo orientazionale (si
perde la periodicità ma si conserva l’orientazione di certi elementi) quasi-cristalli
b) conservare un ordine a lungo range solo in una o due dimensioni (almeno orientazionale) e
perderlo nelle rimanenti due o una dimensione cristalli liquidi
c) mantenere le distanze interatomiche, le coordinazioni, e gli angoli tra i legami costanti,
realizzando nondimeno una struttura disordinata (è richiesta una bassa coordinazione, e.g.,
amorfi covalenti) reticoli di Bethe
d) conciliare il periodo dell’ordine cristallino con un diverso periodo del sistema elettronico
(onde di densità di carica) simmetrie traslazionali in competizione, ossia reticoli
incommensurati o commensurati a lungo periodo (superstrutture e supersimmetrie)
Le strutture cristalline:
Questa parte del programma è svolta nel corso di Chimica Fisica (Prof. Catti) e deve essere
conosciuta anche agli esami di Fisica della Materia, essendo propedeutica al resto.
Nozioni indispensabili:
-
Simmetria traslazionale in 1, 2 e 3 dimensioni;
-
vettori di traslazione;
-
vettori di traslazione primitivi; passi e costanti reticolari;
-
definizione della cella elementare (infiniti modi di definirla: qual è la più conveniente?);
volume della cella elementare;
-
cella di massima simmetria puntuale (cella di Wigner-Seitz) e sua costruzione;
-
7 sistemi cristallini in 3D (cubico, esagonale, tetragonale, ortorombico, romboedrico
(trigonale), monoclino, triclino) e i 14 reticoli di Bravais (tabella 1.1 e figura 1.4 di GS)
-
Reticoli con base (più atomi nella cella elementare)
-
Cella cubica e cella romboedrica dei reticoli fcc e bcc (figure 1.4 e 1.5 di GS)
-
Notazione a 4 indici per gli esagonali (perché?); reticolo hcp (esagonale compatto);
-
Direzioni reticolari, piani reticolari: definizioni e notazioni; teorema e indici di Miller
-
Frazioni di impacchettamento in 3D; frazioni di impacchettamento planari; frazioni di
impacchettamento lineari (se vedano schede sul sito Frazioni d'impacchettamento atomico).
Queste schede sono sostitutive di 1.6 di GS (“Local atomic bonding units” e relative
notazioni), ma occorre avere la nozione di coordinazione quanti atomi primi vicini (NN)
circondano un dato atomo del reticolo?
-
Strutture che è necessario conoscere con esempi:
a) monoatomici: fcc (Cu, Ag, Ni,…), bcc (Na, W, Fe, V…), sc (Po), hcp (Co, Ti,…)
b) biatomici: fcc (NaCl, diamante, sfalerite); hcp (wurzite, lonsdaleite); hex(grafite); sc
(CsCl)
c) cubici a struttura CaF2 e ABO3 (perovskiti cubiche)
-
Esercizi:
a) Ragionare sulla struttura reticolare degli elementi (Tabella 1.4 di GS)
b) Fare esercizi sulle frazioni di impacchettamento per alcune delle strutture sopra elencate
c) Ragionare sul rapporto dei raggi ionici nelle strutture NaCl e CsCl
d) Trovare la struttura dell’allumina (Al2O3)
Caratterizzazione microscopica mediante microscopio elettronico a trasmissione (TEM): vedi sul
sito il seminario Visit to CNR: Introductory Lecture to TEM (Dr. Angella)
2. LEGAMI NEI SOLIDI
Parte propedeutica al Capitolo 2 di GS: capire come stanno insieme le molecole
-
Legame chimico (°): spostamento di carica guadagno energetico (coulombiano) supera
la spesa per lo spostamento della carica
a) Esempi dove a spostarsi sono gli elettroni:
legame ionico, legame covalente, e stati intermedi.
b) Esempio dove a spostarsi sono protoni:
legame a idrogeno
-
Legame fisico (°): senza spostamento di carica, ma semplice polarizzazione elettrica di
atomi o molecole e quindi attrazione coulombiana tra loro
a) Le molecole possono avere dipoli e/o quadrupoli (in generale multipoli) permanenti che
si orientano in modo da determinare tra loro forze globalmente attrattive
forze coulombiane multipolari; queste forze sono puramente elettrostatiche e hanno
natura classica.
b) Atomi e molecole vicini tra loro, anche se privi di multipoli permanenti, si disturbano
mutuamente inducendo gli uni sugli altri dipoli (multipoli) fluttuanti: le forze attrattive tra
dipoli (multipoli) mutuamente indotti determinano la parte attrattiva delle
forze di van der Waals; l’origine di queste forze è puramente quantistica, si chiamano
anche forze di dispersione, o forze di London.
(°) La terminologia “legame fisico, legame chimico” piace ai fisici/chimici delle superfici
che parlano di fisi-sorbimento e chemi-sorbimento quando un atomo (o molecola) si attacca
alla superficie di un solido con legame “fisico” o “chimico”, rispettivamente.
-
Origine quantistica delle forze repulsive
Quando si spostano le cariche elettroniche si formano ioni positivi e negativi: quelli di segno
opposto si attraggono, mentre quelli di segno opposto si respingono. Poiché ioni di un segno
tendono a coordinare (tirare vicino) carica di segno opposto e tenero lontano la carica dello
stesso segno, in generale l’energia potenziale coulombiana è globalmente negatica
(attrattiva).
- Ora l’energia potenziale coulombiana è tanto più negativa (attrattiva) quanto più le cariche
(opposte) sono vicine tra loro: che cosa impedisce il collasso delle cariche in un punto?
1° impedimento quantistico al collasso coulombiano (principio di indeterminazione, o di
Heisenberg).
Nei sistemi planetari è l’energia cinetica ad opporsi all’attrazione gravitazionale (la ragione
per cui la luna non cade sulla terra…..). Ma nel mondo atomico allo zero assoluto, dove non
dovrebbe seerci energia cinetica? Nel mondo atomico, governato dalla meccanica
quantistica, sopravvive a 0°K un’energia cinetica dovuta al principio di indeterminazione di
Heisenberg (energia di punto zero) che cresce con il confinamento degli elettroni e
impedisce il “collasso coulombiano”.
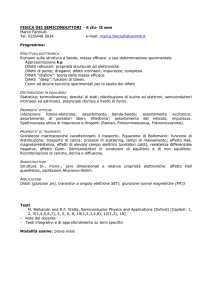
- Ragionare sull’esempio dei due protoni legati da un elettrone nel mezzo (molecola H2+):
a) calcolare l’energia cinetica dovuta al principio d’indeterminazione, supponendo che il x
sia 1/3 della distanza tra i nuclei;
b) osservare che l’energia cinetica di confinamento (di punto zero) cresce inversamente al
quadrato della distanza e quindi determina un minimo nell’energia totale in funzione della
distanza internucleare; discutere come devono essere le energie potenziali attrattive e
repulsive affinchè vi sia un minimo, ragionando sulla Figura 1.
20
10
0
10
20
0.5
1.0
1.5
2.0
Figura 1: cosa rappresentano ascissa, ordinata e le tre curve? Discutere
b) calcolare la distanza d’equilibrio e il corrispondente minimo dell’energia totale; esprimere
le due quantità in unità atomiche (raggio di Bohr per la distanza, 2Rydberg = Hartree) e
confrontarle con i dati sperimentali.
c) spiegare perché la molecola H2+ non si disgrega in H + H+. Cosa si intende per energia di
dissociazione e quanto vale nell’esercizio appena fatto? Perché essa è minore del valore
assoluto dell’energia totale della molecola?
2° impedimento al collasso coulombiano (principio di esclusione, o di Pauli)
Se abbiamo più di un elettrone nel sistema dobbiamo tenere conto di un altro
principio quantistico, il principio di esclusione, per cui due elettroni non possono avere gli
stessi numeri quantici (se tra i numeri quantici contiamo anche il suo numero magnetico di
spin, detto più semplicemente spin, che può essere ½ (“spin su”) o – ½ (“spin giù”)). Si può
anche dire che ogni orbitale (designato dai soli numeri quantici orbitali) può ospitare al più
due elettroni, purchè uno a spin su e l’altro a spin giù (stato di singoletto). Corollario: se
hanno lo stesso spin (stato di tripletto) devono necessariamente sistemarsi su orbitali diversi.
[Significato di stati di singoletto e tripletto: spin anti-paralleli, cioè opposti, (singoletto) si
sommano a 0 e il numero quantico magnetico totale può solo essere 0; spin paralleli
(tripletto) si sommano a 1 e il corrispondente numero quantico magnetico totale può
assumere tre valori: 1, 0, -1]
Conseguenza: gli atomi non possono compenetrarsi perché questo comporterebbe
l’invasione delle orbite già occupate di un atomo da parte degli elettroni dell’altro. La
repulsione dovuta la principio di esclusione (repulsione di Pauli) è assai più potente di
quella dovuta all’indeterminazione: decresce esponenzialmente allontanando gli atomi o, se
preferite, cresce esponenzialmente quando li avviciniamo.
Con questi concetti generali leggere 2.1 del testo GS; in particolare ragionare sulla molecola
(neutra) H2 ( figura 2.1 di GS). Lo stato di tripletto impone che un solo elettrone sia sullo
stato energetico più basso, mentre l’altro elettrone deve stare su un orbita di energia più alta:
in questo caso l’elettrone non può sistemarsi tra i due nuclei (protoni) perché c’è già l’altro
con lo stesso spin e quindi non concorre al legame, anzi lo indebolisce. Si dice che il suo è
uno stato anti-legante, in quanto la sua energia decresce monotonamente al crescere della
distanza dei nuclei senza avere un minimo.
Le orbite dello stato legante e dello stato anti-legante sono esempi di orbitali molecolari.
Come stanno insieme i solidi
La figura 2.2 di GS mostra che quasi tutti gli elementi solidificano in uno stato metallico.
Commento: la molecola dell’idrogeno è il 1° esempio di legame covalente, ma le molecole H 2
formano un solido di van der Waals (esempio di solido molecolare), come i gas nobili (che però
solidificano allo stato atomico). Si prevede che ad altissima pressione anche l’idrogeno formi un
solido metallico. Altri elementi che formano molecole covalenti e quindi solidi molecolari sono
l’azoto (N2) , l’ossigeno (O2), gli alogeni (X2), eccetera. Cercare come solidificano gli elementi B,
P, S, Se, Te, As, Sb e spiegare il significato della scrittura “Covalent” nella figura 2.2 di GS.
a) Legame covalente
Estensione in 3D 4 legami sp3 (diamante, sfalerite, wurzite): coordinazione 4
Estensione in 2D legami sp2 (grafite, P nero, As, Sb, Bi): coordinazione 3
Estensione in 1D legami sp (carbine, S, Se, Te): coordinazione 2
Solidi molecolari (da H2 alle macromolecole)
Figura 2.3 del GS: ragionare sul passaggio graduale da covalente omopolare a covalente
eteropolare a ionico nozione di elettronegatività e ionicità (sotto legame ionico)
b) Legame metallico
Strategia simile a quella di H2+: elettroni liberi formano un gas (gas di Fermi) con un’energia
massima: l’energia di Fermi EF , che è collocata sotto il livello di vuoto quanto corrisponde
alla soglia fotoelettrica (funzione lavoro). Il confinamento degli elettroni dà un’energia
cinetica media finita <K> (volume)-2/3 . Pertanto la densità di energia cinetica
<K>/volume (volume)-5/3 (densità di carica elettronica)5/3
Perchè “elettroni liberi”
(cioè non interagenti)? schermo (classico o quantistico
(Thomas-Fermi)?). Confinamento: se un elettrone cerca di uscire dal metallo: potenziale
attrattivo detto di “carica immagine”!
Metalli:
“semplici”: s (alcali),
sp (alcalino-terrosi, terrosi, Pb);
di transizione d (Ti-Ni);
nobili ds (Cu, Ag, Au, Pt,…);
terre rare e attinidi d1, f (Sc,Y,La-Lu,At-Lw)
c) Legame ionico
Nel cristallo 3D: somma di tutte le forze attrattive e repulsive
Vcoul (a)
e2
40
ij
zi z j
rij
M
e2
40 a
,
costante di Madelung per NaCl: M ( NaCl) 1.74
Dunque l’energia di legame per molecola nel cristallo (-6.6 eV) è quella della molecola libera
moltiplicata per il fattore αM , anzi un po’ di più dato che la distanza di equilibrio a nel solido è
un po’ più piccola che nella molecola singola.
Struttura fcc (NaCl) o sc (CsCl) o sfalerite (wurzite)? dipende da rc / ra
( 1) :
________________________
1 – 0.732 :
CsCl
0.732 – 0.414 :
NaCl
0.411 – 0.225 :
ZnS
Vedi Tabella 2.4: raggi ionici
Vedi Tabella 2.6: ionicità (secondo Phillips)
________________________
Energia (o entalpia) di coesione Hc = lavoro per mole necessario per separare i costituenti
all’infinito (atomi per covalenti; ioni per ionici) ; partendo dagli stati standard dei
componenti si ottiene con il ciclo termochimico di Born-Haber.
Tavola delle elettronegatività secondo Pauling: A B [ E AB 12 ( E AA EBB )]eV
Ragionare sulle tabelle 2.9 (potenziali di I e II ionizzazione), 2.10 (affinità), 2.11
(elettronegatività), 2.12 (raggi atomici)
d) Solidi di van der Waals:
discutere il potenziale di Lennard-Jones
VL J (r ) 4 ( / r )12 ( / r ) 6 :
calcolare posizione del minimo e valore dell’energia potenziale.
Conclusione:
gerarchia delle interazioni in relazione alle temperature di fusione Tm e alle energie di coesione Ecoh
(Tabella 6.3, p. 179 del GS)
Na
371
Al
°K
107.8 kJ/mol
s
933
327.6
sp
V
2183
511.0
3d
Mo
2896
656.6
4d
W
3695
848.1
5d
Cu
1358
336.2
3d4s
Si
1687
451.3
sp3
NaCl
1074
638.3
ionico
SiO2
1996
1850
-cristobalite
Ne
24.7
8.6 = 0.02 eV/atomo
wdW
Costruire un diagramma Tm in funzione di Ecoh per un buon numero di solidi cercando i dati su vari
data-base e ragionarci sopra.
Capitolo 3: Diffrazione e reticolo reciproco interamente svolto nel corso del Prof. Catti
Oltre a quanto elencato sopra nel paragrafo “Le strutture cristalline” ricordare:
a) Relazione tra reticolo diretto [cella elementare parallelepipeda e suo volume; cella di WignerSeitz] e reticolo reciproco [vettori di reticolo reciproco G; cella elementare parallelepipeda e
suo volume; zona di Brillouin (di massima simmetria puntuale)] con esempi per fcc e bcc.
Osservare dualità fcc-bcc !
b) Teorema di Bloch: uk (r) vk (r) exp[ik r] dove u è una soluzione tipo onda (di vettore
d’onda k) di un problema di dinamica su reticolo (es.: vibrazioni, funzioni d’onda elettroniche,
etc.) e
vk (r) vk (r Rlmn ) G wk G exp[ iG r]
è una funzione periodica sul reticolo (qui
rappresentata nel suo sviluppo di Fourier con i coefficienti wk+G. (ricorda le traslazioni
R lmn la mb nc con (l,m,n) terna di interi positivi, negativi o nulli)
Dimostra che vk G' (r) vk (r) per cui tutte le soluzioni indipendenti del problema dinamico
hanno un k contenuto nella cella reciproca (ovvero nella zona di Brillouin).
Esercizio: discutere sistemi cristallini planari (in 2D)
Capitolo 4: Ordine e disordine nei solidi
Molti argomenti sviluppati nella parte introduttiva ORDER AND DISORDER sono già stati
anticipati nel discorso preliminare sulla struttura dei solidi e inquadrati nei paradigmi:
-
simmetrie in competizione
-
simmetria puntuale simmetria traslazionale (alte simmetrie puntuali (icosaedriche)
incompatibili con simmetrie traslazionali: cristalli, nanocristalli e cluster)
-
ordine periodico ordine orientazionale (cristalli e quasicristalli)
-
ordine a lungo e corto range (amorfi, Bethe,…)
-
ordine su una o due dimensioni (cristalli liquidi)
Su questa base leggere e ragionare su 4.2: Examples of Ordered and Disordered Solids e su 4.3
Amorphous solids.
Il nostro discorso riprende da: DEFECTS IN SOLIDS. Anche questa parte sarà parzialmente
sviluppata nel modulo tenuto dalla Prof. Simona Binetti.
Cosa è importante per noi?
A) difetti = rottura della periodicità;
B) classificazione e natura fisica dei difetti
a) Difetti 0-dimensionali (puntuali = point defects)
a1) Intrinseci (cioè termicamente generati, perciò detti anche termodinamici): vacanze,
interstiziali; nei reticoli poliatomici: anti-sito, complessi; difetti di Shottky (equilibrio
bulk-superficie) e di Frenkel (eq. V-I); dangling bonds
TERMODINAMICA DELLA FORMAZIONE DEI DIFETTI (4.6 E 4.7)
a2) Estrinseci: impurezze sostituzionali e interstiziali, centri di colore, complessi
DIFFUSIONE (Capitolo 6: 6.1, 6.2)
b) Difetti estesi 1-dimensionali (di linea = line defects)
b1) Dislocazioni a spigolo (edge): a 90°, a 60°: definizione di vettore di Burger, asse della
dislocazione e piano di scorrimento
b2) Dislocazioni a vite (screw): definizione vettore di Burger e asse della dislocazione
b3) Anelli (loops) di dislocazioni: pinning su difetti di punto, meccanismo di Frank-Reed
c) Difetti estesi 2-dimensionali (planari = planar defects)
c1) Staking faults (errori d’impilamento): esempi nei III-V (sfalerite vs. wurzite); da errore
di crescita e da deformazione; disordine antifase
c2) Superfici
intrinseche: giacitura, ideale, rilassamento (buckling, rumpling), ricostruzione
estrinseche: segregazione, passivazione, overlayers
DIFETTI DI SUPERFICIE (0D, 1D, 2D) (*)
c3) Bordi di grano: - a piccolo angolo (tilt boundary) = array di dislocazioni a spigolo;
- da errore di crescita (mancata decostruzione: 9, 11…);
- a grande angolo;
- twin boundaries (cristalli gemelli) , coherent boundaries
c4) Bloch walls (pareti di Bloch) interfase
c5) Interfacce
d) Difetti estesi 3-dimensionali
d1) intrinseci: voids (cavità); amorfizzazione;
d2) estrinseci: inclusioni, segregazione, precipitazione
d3) VIBRAZIONI (FONONI) (Capitolo 5)
(*) tentare una classificazione dei difetti di superficie analoga a quella dei difetti di volume:
as) difetti superficiali 0-D: vacanze, ad-atomi, sostituzionali,, adsorbati (fisi-, chemi-)
bs) difetti superficiali 1-D: misfit dislocations, steps, missing row, adsorbate chains
cs) difetti superficiali 2-D: ricostruzione, roughening, isole
Capitolo 5: Fononi (1 CFU)
-
Proseguendo il discorso sui difetti come interruzione della periodicità, consideriamo ora le
vibrazioni naturali come “difetti dinamici” in quanto disturbano la periodicità del reticolo
statico
-
Nel reticolo periodico i modi propri di vibrare hanno la struttura di onde piane che si
propagano in una qualunque direzione cristallina. Pertanto il moto su ciascun piano
reticolare perpendicolare alla direzione di propagazione è uguale per tutti gli atomi: gli
atomi di un piano reticolare normale alla direzione di propagazione si muovono tutti in
fase.
Pertanto possiamo assimilare ogni piano normale alla direzione di propagazione a un singolo
punto materiale di massa uguale a quella degli atomi del piano e sostituire alle interazioni tra
gli atomi di piani vicini analoghe interazioni tra i punti materiali suddetti. In tal modo
costruiamo il modello di
5.1: Catena lineare mono-atomica
a) La dinamica della catena lineare di masse uguali M e costante di forza ai primi vicini K è
equivalente a quella del reticolo (nella direzione della catena) in quanto i quadrati delle frequenze
sono proporzionali per un oscillatore armonico a K/M. Se al singolo atomo della catena sostituiamo
un piano reticolare di N atomi le frequenze al quadrato sarebbero proporzionali a NK/(NM) = K/M,
cioè sarebbero le stesse.
b) La costante di forza K è ottenuta derivando due volte rispetto allo spostamento u l’energia
potenziale U(u) = Ku2/2 (potenziale armonico).
c) La forza di richiamo elastica F = -Ku esprime la legge di Hooke.
d) La costante K sta per una costante di forza longitudinale se il moto è parallelo alla catena (cioè al
vettore d’onda k) oppure per una delle due costanti di forza trasversali se il moto è in una delle due
direzioni perpendicolari a k. Possiamo distinguerle in KL, KT1, KT2
(va anche bene indicare le costanti di forza con il simbolo f)
d) Eliminazione delle superfici (che interrompono la periodicità) condizioni al contorno cicliche:
u-uN/2 = u-N/2 (se N è il numero degli atomi (pari)) oppure faccio andare N infinito.
e) Nozione di zona di Brillouin (vedi precedenti note)
La soluzione dell’equazione del moto per la catena lineare segue GS: avrai (in 3D) 3 curve di
dispersione acustiche: LA, TA1, TA2 con tre velocità del suono cs,L, cs,T1, cs,T2 . In direzioni di alta
simmetria le due trasversali sono uguali. Distinguere tra velocità di gruppo e velocità di fase
Quantizzazione: come nel libro; ragionare sul significato det termine ½ (energia di punto zero
dovuta al principio di indeterminazione)
5.2 Catena bi-atomica
Si procede come in GS. Non è necessario usare le matrici 2 x 2 (si procede per sostituzione), ma è
istruttivo farlo! Discutere: significato massa totale (limite acustico) e massa effettiva (modi ottici a k
= 0: perché si chiamano “ottici”?); modi a bordo zona e gap (moto rigido dei sottoreticoli)
Sviluppare il formalismo generale con diverse masse e diverse costanti di forza e poi discutere i casi
in cui:
a) K = K’ oppure MA = MB (se valgono entrambe le eguaglianze ritrovare la catena monoatomica e ragionare sul raddoppio della zona di Brillouin)
b) K << K’ oppure MA >> MB (cristalli molecolari, grande gap a bordo zona, dispersione piatta
dei modi ottici (alla Einstein))
5.3 Fononi in 3D (caso generale)
Ragionare sulle curve di dispersione del Si. In classe discusso il caso ionico (separazione a k = 0 di
LO dai due TO a causa del campo macroscopico: l’argomento è sviluppato su GS da pag. 238 a
pag. 241 fino alla relazione di Lyddane-Sachs-Teller)
5.4 Densità di stati fononici
A lezione abbiamo chiamato tale densità g() e abbiamo calcolato la densità di stati per il modello
di Debye (parabola) e per il modello di Einstein (funzione delta di Dirac). Abbiamo quindi
utilizzato il concetto di distribuzione statistica di Bose-Einstein e di densità di sttai per calcolare il:
calore specifico (atomico) dei solidi a volume costante
premettere la legge di Dulong e Petit (valida sempre a temperatura sufficientemente alta: discutere
cosa vuol dire “sufficientemente alta”). Poiché la tabella 5.1 dà CP si può ricordare la relazione
C P CV PVa v
dove P è la pressione, Va il volume atomico e v d ln V / dT il coefficiente di espansione termica
(somma dei tre coefficienti di dilatazione termica lineare (chiamati genericamente nel capitolo
5.9 di GS) nelle tre cristallografiche principali).
Nel diagramma qui sotto rappresento CP usando l’equazione sopra con la formula (%.63) di GS
dove è la costante di Gruneisen (senza dimensioni) che fornisce una misura dell’anarmonicità ed
è dell’ordine dell’unita (si farà in un corso di Fisica dello Stato Solido) e B è il modulo elastico di
volume (bulk modulus): è il reciproco della compressibilità.
Ricordare che v d ln V / dT dipende dalla temperatura (e il caso eclatante del Si, diamante, SiO2,
cioè solidi a bassa coordinazione che vicino a 0 K hanno α < 0). Ragionare sulla tabella 5.3, ma
omettere il capitolo Anharmonic Effects (vd. sotto).
5.5, 5.6 e 5.7 (niente 5.8): la teoria del calore specifico di Debye (e di Einstein)
a) discutere i casi a bassa T (andamento T3) e ad alta T (Dulong e Petit).
b) Discutere la temperatura di Debye (tabella 5.2): universalità della curva di Debye riscalando
l’ascissa!
Effetti anarmonici:
solo le note esposte a lezione. Ricordare
(a) espansione termica;
(b) abbassamento sulle frequenze con la temperatura;
(c) collisioni tra i fononi e termalizzazione, quindi resistività (conducibilità) termica finita:
comprendere e discutere tabella 5.4 e soprattutto Figura 5.15 di GS
Correlare la conducibilità termica al problema della diffusione (vedi corso Binetti): analogia tra
prima legge di Fick e legge della trasmissione del calore (definizione della conducibilità termica);
sulla base di questa analogia, costruire la seconda legge di Fick per la trasmissione del calore.
Importanti però la definizione (5.64) e le formule (5.68) e (5.69), senza dimostrazione.
Cap. 6: Processi termicamente attivati, diagrammi di fase e transizioni fase
Questo capitolo del GS non è stato svolto a lezione e non fa parte del programma d’esame del
presente corso da 4 CFU, in quanto tratta argomenti che formano parte essenziale del corso della
Prof. S. Binetti. E’ bene tuttavia che lo studente si presenti all’esame avendo nozioni generali sul
significato dell’Eq. (6.1), delle leggi e meccanismi della diffusione [Cap. (6.2)], poichè possono
intervenire nel discorso sui difetti puntuali e sui meccanismi della loro formazioni (vedasi Cap. 4).
I capitoli 7,8 e 9 del GS sono parte del corso di Fisica dei Materiali II (3° anno, I sem.; Prof.
Stefano Sanguinetti). Si passa quindi al:
Cap. 10: Proprietà meccaniche dei materiali
10.1 di GS: Terminologia
10.2 e 10.3 - Dalla legge di Hooke (forze elastiche lineari su punti materiali, ossia linearità forzaspostamento) alle leggi per i mezzi elastici continui omogenei:
-
dal concetto di forza su un punto al concetto tensoriale di sforzo = stress (forza in direzione
su areola in direzione )
-
dal concetto di spostamento al concetto (tensoriale) di deformazione = strain (spostamento
in direzione di un punto posizionato rispetto a un punto origine fisso lungo )
Ricorda: sforzo e deformazione sono tensori a due indici cartesiani (matrici 3x3) simmetrici perchè
non vogliamo le componenti di rotazione rigida.
Attenzione: le definizioni di stress e strain nominali e veri sono dati in questi paragrafi! Serviranno
in particolare nella discussione delle relazioni stress-strain per i materiali plastici.
10.4 – Costanti elastiche. Per le notazioni tensoriali ordinarie abbiamo convenuto di usare indici
greci (,,, = x,y,z) mentre per le notazioni contratte dette di Voigt usiamo indici latini (i,j =
1,2,3,4,5,6). Scrivere quindi la (10.13) con indici ,,, e le successive con i,j, altrimenti si fa
confusione. Ricorda la trascrizione
xx = 1, yy = 2, zz = 3, zx = 4, yz = 5, xy = 6
Tensore elastico = costanti elastiche: riduzione da 81 componenti a 21 causa simmetrie; nella
notazione di Voigt il tensore c è ancora simmetrico: spiega come da 36 componenti si passa a 21.
Ragiona sulla riduzione dovuta a simmetrie cristallografiche: Table 10.1
Significato della traccia del tensore di strain (cambio relativo di volume) e della traccia del tensore
di stress (correlarlo alla pressione idrostatica).
Il caso cubico è molto importante: solo tre costanti elastiche indipendenti.
Ulteriore riduzione: isotropia e Cauchy (ragionare sulla Table 10.3)
10.5, 10.6, 10.7 Moduli elastici. I moduli che si misurano direttamente sono:
-
modulo di Young E, modulo di scorrimento G
-
modulo di volume (bulk modulus) e compressibilità
-
rapporto di Poisson
-
relazioni con le costanti elastiche
Ragionare sulle Tabelle 10.2 e 10.3
10.8 - Materiali isotropi (policristallini oppure cubici che per caso soddisfano la relazione di
isotropia)
Relazione di isotropia tra E, G e rapporto di Poisson
Relazioni lineari tra (E,G,B) e (c11, c12, c44): ricavarle in una direzione e nell’altra!
Attenzione: concetto di compliance constants Sij (ricorda le semplici relazioni di reciprocità tra
invarianti c11 + 2c12, c11 – c12, e c44 e analoghe per Sij); sapere che esistono le due costanti di Lamè.
10.9 - Energia potenziale elastica
Anche qui si passa dall’energia potenziale un punto materiale su cui agisce una molla, alla densità
di energia potenziale elastica di un corpo deformato:
U el ( x) 12 Kx 2 uel (e) 12 ij cij ei e j
attenzione: Uel è energia potenziale, uel è densità di energia
potenziale, cioè energia potenziale per unità di volume.
Ricorda: in classe, per esercizio, abbiamo determinato la relazione c12 /(c11 c12 ) scrivendo
uel(e) per una deformazione tensile lungo z e imponendo la condizione di equilibrio
u el (e)
0
(dopo avere sostituito 1 2 3 ).
Dimostrare in modo analogo che, se comprimo con uno stress 3 lungo z una sbarra cilindrica
elastica chiusa dentro un cilindro rigido, lo stress esercitato dalla sbarra sulle pareti laterali rigide è
dato da
1 2 3
1
.
Cosa succede (e cosa vuol dire) se = 0.5 ?
10.10 - Onde elastiche
Sono state calcolate in classe per i cristalli cubici e si sono determinate le velocità del suono
trasversale e longitudinale (vd. la Tabella 10.5) per la direzione <100>; abbiamo scritto poi
completato la tabella e infine abbiamo applicato la relazione di isotropia per dimostrare che le
velocità del suono per le polarizzazioni logitudinali diventano uguali in tutte le direzioni; e così per
quelle trasversali.
In classe è stato fatto notare che il campo vettoriale di spostamento può essere scritto come somma
di una componente vettoriale solenoidale e di una componente irrotazionale, una corrispondente
all’onda trasversale e una all’onda longitudinale.
10.11 – Generalità sulle relazioni stress-strain oltre il limite lineare fino alla rottura
E’ a questo punto che si discute accuratamente la Fig. 10.5 per una prima schematica
classificazione dei diversi materiali in funzione del comportamento meccanico quale emerge dalla
curva stress-strain.
Attenzione: stress e strain sono quelli nominali. Spiegare la presenza del massimo nello stress
nominale (detto tensile strength o TS) della curva (b); tale massimo (ovviamente) non c’è per la
curva true-stress – true-strain (vd. Fig. 10.11)
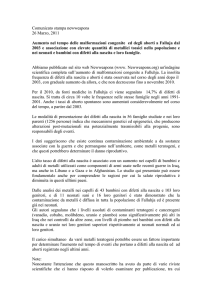
Due parole in più sul comportamento elastomerico (curva (c)): nella figura qui sotto si
rappresentano a sinistra catene organiche di un elastomero non stirate ( = 0); con un piccolo stress
le catene si stirano opponendo resistenza all’allungamento di segmenti a; a maggiori stress le catene
si avvicinano e si formano ponti b che aumentano la resistenza del materiale; la figura a destra
illustra il cambio di regime da a ad a+b.
Anelasticità:
- considerare solo gli aspetti macroscopici (il fenomeno di isteresi descritto dalla Figura 10.8) e
quindi saltare 10.12. Si assume che i fenomeni viscoelastici siano stati studiati nel laboratorio del
Prof. Roberto Simonutti e non fanno quindi parte di questo programma. Naturalmente un commento
sulla curva (d) di Fig. 10.5 è comunque benvenuto.
Alcuni concetti importanti non ben delineati su GS:
-
Risposta elastica significa, per definizione, che al rilascio dello stress il campione ritorna
istantaneamente (in realtà entro il tempo che il suono impiega a percorrerlo, quindi sulla
scala dei milli- o microsecondi) nella condizione iniziale o comunque con uno strain residuo
inferiore a 0.002 (ossia un recupero superiore al 99.8%).
-
La risposta elastica è perfettamente lineare (Hooke) solo per piccole deformazioni; per
maggiori
deformazioni
devia
dalla
linearità
(elasticità
non
lineare)
a
causa
dell’anarmonicità (termini cubici nei potenziali inter-atomici), e la curva stress-strain
presenta una lieve concavità verso il basso (i moduli elastici diminuiscono lievemente); però
il sistema resta in regime elastico perchè al rilascio dello stress si ha comunque il recupero
oltre il 99.8% cioè entro lo 0.002.
-
Il limite elastico è quello strain (yield strain y) oltre in quale il sistema, rilasciato lo stress,
recupera meno del 99.8%. Lo stress corrispondente al limite elastico si chiama sforzo di
snervamento (yield stress y): oltre lo snervamento una parte crescente della deformazione è
irreversibile.
I materiali fragili (cristalli ionici; curva (a) in Fig. 10.5) non hanno praticamente yield: si fratturano
prima e quindi la deformazione fino a prima della frattura e quasi interamente reversibile. Si parla
di frattura fragile. Una volta innescata (dalla presenza di una cricca anche microscopica presso la
quale lo sforzo applicato è fortemente amplificato) procede rapidamente (velocità confrontabile o
superiore alla velocità del suono) in modo incontrollato.
10.13 - I materiali duttili (curva (b)) sopportano strain relativamenti grandi prima della frattura
grazie alla deformazione plastica.
Note:
-
deformazione plastica in materiali macro o microcristallini avviene per deformazione dei
grani dovuto al moto delle dislocazioni (ad alta temperatura partecipano in massa anche le
vacanze : meccanismo di Nabarro-Herring)
-
deformazione plastica in materiali nano-cristallini avviene per scivolamento dei grani gli uni
sugli altri; costa troppa energia deformarli a causa del fatto che le dislocazioni sono ancorate
alle superfici e non si muovono e inoltre cresce il ruolo delle superfici. Materiali
nanostrutturati hanno un alto yield, ma oltre quello i grani diventano mobili e il
comportamento diventa plastico quasi ideale (plasticità ideale = stress vero costante!): tale
comportamento si dice elasto-plastico.
-
Lo yield stress aumenta con la diminuzione del diametro medio (d) dei grani: si veda la
relazione di Hall-Petch, Eq. (10.43).
-
Lavoro necessario per la frattura (per unità di volume) = integrale dello stress rispetto allo
strain da 0 a f (strain alla frattura) = tenacità (toughness): tale lavoro è in massima parte
irreversibile; la parte reversibile è l’integrale rispetto allo strain da 0 allo yield e si chiama
resilienza (resilience). La deformazione plastica, essendo dovuta a scorrimento di piani gli
uni sugli altri e non ad allontanamento tra gli stessi, non comporta praticamente
cambiamento di volume. Leggere la discussione di pag. 337 più qualche idea sul:
-
work hardening (si cita il meccanismo di generazione di anelli di dislocazioni inizialmente
ancorate (pinned) a difetti secondo il meccanismo di Frank-Read)
-
si è accennato brevemente allo scorrimento a caldo (creep) (leggere), all’effetto fatica
(fatigue) (leggere: ricordare le due classi di materiali come da figura 10.13) e alla
definizione di
-
durezza (hardness): misura la resistenza di un materiale alla deformazione plastica. Le
diverse scale (a parte la scala empirica Mohs) sono definite in base alla forma
dell’indentatore (conico, piramidale quadrato, piramidale rombico schiacciato, semi-sferico)
e del carico applicato. Tutte danno come durezza il rapporto (in unità convenzionali) tra il
carico applicato e l’area della superficie deformata permanentemente: dimensionalmente la
durezza si misurerebbe quindi in GPa come i moduli elastici. Per gli indentatori appuntiti
(Vickers, Knoop....) lo stress iniziale è altissimo essendo piccolissima la superficie di
contatto e quindi lo yield è ampiamente superato e si inizia immediatamente la
deformazione plastica. [Per gli indentatori sferici (Brinnell) occorre raggiungere prima un
carico minimo cui corrisponde il limite di snervamento, per cui al carico applicato va
sottratto quello minimo].
10.14 – Teoria della plasticità e frattura
Le nozioni importanti (già in parte anticipate nel capitolo sui difetti) sono:
-
moto delle dislocazioni a spigolo
-
bloccaggio delle dislocazioni da impurezze (incrudimento),
-
piani di slittamento (slip planes) e direzioni di slittamento in relazione alle frazioni di
impacchettamento planari e lineari, e quindi numero dei sistemi di slittamento (slip systems,
Table 10.7)
-
in GS a metà di pagina 344 si spiega la differenza tra glide (normale moto delle dislocazioni
lungo il proprio slip plane) e climb (arretramento o avanzamento della linea della
dislocazione fuori dallo slip-plane per sottrazione o aggiunta di atomi connessa con il moto
combinato delle vacanze; come detto sopra le vacanze sono molte e molto mobili solo ad
alta temperatura Nabarro-Herring)
-
nozione di stress di scorrimento critico y (critical shear stress, in fondo a pag. 346) per
capire la Fig 10.18 in alto a sinistra (slip), o meglio come in figura: lo stress tensile applicato
produce il massimo effetto su piani di scorrimento a circa 45° dove si raggiunge critical
shear stress e si innesca lo scorrimento per moto delle dislocazioni che produce la
deformazione plastica. Per questa ragione le superfici di rottura plastica presentano tipici
crateri o arrotondamenti con margini a circa 45° rispetto alla direzione originale dello stress.
-
Si può in prima approssimazione tralasciare da pag. 348 fino a 351: la teoria di Griffith
riguarda in realtà la frattura fragile e quindi è fuori posto in questo sottocapitolo. Altrimenti
ricordare che tutta la fisica importante sta nella Eq. (10.44), illustrata dalla Fig. 10.19: lo
sforzo applicato è fortemente amplificato localmente nell’intorno di una cricca (così come
il campo elettrico è amplificato alle punte di un conduttore carico!) e assume il valore max.
In base a questo è possibile determinare lo stress critico di frattura (Eq. 10.48), oltre il quale
la cricca si allunga rapidamente, in funzione della semi-lunghezza a della cricca iniziale
(indentazione, se uno vuole, ad esempio, rompere una lastra di vetro dopo averla “indentata”
con una punta di diamante), del modulo di Young e dell’energia per unità di superficie
creata (analogo solido della tensione superficiale) s. Come spiegato a lezione, il lavoro per
“clivare” un materiale fragile, ossia la pura resilienza (in assenza quindi di lavoro di
deformazione plastica), è teoricamente uguale al lavoro per creare due nuove superfici.
ALCUNI UTILI COMPLEMENTI DI ELASTICITA’
1. Torsione vs scorrimento
Considera la torsione di un cilindro di lunghezza L, raggio R e modulo di scorrimento G
prodotta da una coppia torcente T. La relazione tra coppia applicata T e angolo di torsione
prodotto la trovi nel riquadro qui sotto, in due forme diverse. La dimostrazione è elementare e la
lascio agli studenti svegli. Nota la dipendenza dalla quarta potenza di R. Se 2T/πR4 rappresenta
lo stress torsionale mentre φ/L rappresenta lo strain angolare, la loro costante di
proporzionalità è ancora G.
2. Relazioni moduli-costanti elastiche e isotropia-Cauchy (caso cubico)
Si trova facilmente (vedi tua tabella)
B 13 (c11 2c12 ),
E
(c11 2c12 )(c11 c12 )
,
c11 c12
G c44 ,
c12
.
c11 c12
(1)
Nel caso di isotropia elastica, c11 c12 2c44 , si ritrova la nota relazione 2G (1 ) E .
Definiamo anisotropia il rapporto
2c44
.
c11 c12
(2)
Se vale la relazione di Cauchy (cristallo cubico con solo forze centrali a due corpi) c12 c44
si ha
E G
(1 )(1 2 )
Se vale Cauchy e il sistema è isotropo si ha
.
(3)
1
0.25 . Confronta ora con i valori di in
4
molti metalli in forma policristallina:
0.30 (acciaio), 0.33 (Al), 0.29 (Mg). 0.31 (Ni), 0.34 (ottone), 0.34 (Cu), 0.28 (W), etc.
Questi valori sono tutti superiori a 0.25. Nondimeno la semplificazione Cauchy + isotropia dà
un utile risultato mnemonico. In realtà i metalli si caratterizzano proprio per la non-centralità
delle forze interatomiche, essendo queste mediate dalla distribuzione degli elettroni liberi
interposti. Nei metalli si osservano dunque deviazioni apprezzabili dalla relazione di Cauchy. Si
ha piuttosto che c12 2c44 , il che dà 1/ 3 , come appunto si trova negli esempi su riportati.
Questo per quanto concerne i metalli policristallini. Per l’alluminio monocristallino si hanno le
costanti
c11 1.068 1011 N / m2 , c12 0.607 1011 N / m2 , c44 0.282 1011 N / m2 ,
che danno comunque 0.362 , abbastanza vicino al valore di 1/3, e un’anisotropia elastica
= 1.223.
3. Moduli elastici nei monocristalli cubici
I tre moduli E, G e ν, in generale tra loro indipendenti, bastano a definire completamente le
proprietà elastiche di un cristallo cubico monocristallino. E’ utile quindi sapere, nel caso
monocristallino, la loro dipendenza dalla direzione nello spazio lungo la quale è applicato lo
stress (*). Definiti i coseni direttori n1 , n2, n3 della direzione [hkl] rispetto agli assi x, y e z, si
trova, utilizzando le compliances Sij ,
1
S11 S anis
E[hkl]
1
S 44 2S anis
G[hkl]
S S
1
11 1 anis .
[hkl]
S12 2 S anis
Naturalmente si trova che 3B
S anis (2S11 2S12 S 44 )( n12 n22 n32 n12 n22 n32 )
(3)
E
1
non dipende dalla direzione, come è ovvio.
1 2 S11 2S12
(*) NB: per E il concetto è chiaro; per G oltre alla direzione normale all’areola su cui si applica
lo stress, che definisce la direzione di applicazione, c’è anche la direzione perpendicolare lungo
la quale agisce la forza di scorrimento. Come sappiamo, se la direzione è la [110] ci sono due
velocità trasversali non degeneri, cioè G dipende dalla direzione di applicazione della forza di
scorrimento. Considera quindi che l’espressione data per G è mediata sulle direzioni della forza
nel caso ne dipenda. Il calcolo esplicito di G per diverse direzioni di applicazione dello stress
chiarisce le idee.
4. Isotropia elastica recuperata nel caso policristallino
Definisco n12 n22 n32 n12 n22 n32 con n1 sin cos , n2 sin sin , n3 cos , e faccio la
media di integrando su tutte le direzioni:
4
1
5
sin d d ,
(4)
il che dà
1
53 S11 52 S12 15 S 44
E polycryst
1
53 S 44 54 S11 54 S12
G polycryst
1 polycryst 53 S11 52 S12 101 S 44
2
5
2
3
S11 5 S12 5 S 44
(5)
E
2G
come volevasi dimostrare. Importante notare che in sé i microcristalli non sono elasticamente
isotropi. La relazione di isotropia tra i moduli si recupera attraverso la media su tutte le
direzioni, equivalente a considerare il materiale policristallino. Naturalmente un materiale
policristallino laminato o estruso ha i grani allungati e potrebbe non essere neanche
macroscopicamente isotropo (salvo ricottura sopra la temperatura di ricristallizzazione).
5. Problema:
Una sbarretta a forma di prisma quadrato con rapporto di Poisson ha le facce laterali chiuse tra
quattro pareti rigide. Se applico una compressione zz sulle due basi, quali sforzi xx = yy
eserciteranno le facce laterali sulle rispettive pareti? Confrontare il risultato con quanto si
otterrebbe per un liquido
- Gli amanti delle formule e del rigore matematico possono ora esaminare (su questo sito):
Luciano Colombo: ELEMENTI DI MECCANICA DEI SOLIDI
- Alcuni sviluppi nel campo delle nanotecnologie sono descritte sulla ns. voce Treccani: vedi su
questo sito: Nanotecnologia (da Enc ST Treccani 2008)
")