• La discretizzazione dei segnali")
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
La trasformazione di un segnale continuo nel dominio
del tempo e dell’ampiezza in una sequenza di parole,
formate da un numero finito di cifre, richiede una
discretizzazione, sia nel dominio del tempo, sia nel
dominio dell’ampiezza, noti rispettivamente come:
•campionamento
•quantizzazione.
L’intero processo è noto col nome di conversione
analogico-digitale (A/D conversion).
I dispositivi che effettuano la conversione sono noti
come
Convertitori
Analogico
Digitale
(A/D
Converters).
8.0
6.0
4.0
2.0
[V] 0.0
-2.0
-4.0
-6.0
-8.0
samples
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Il teorema del campionamento ci assicura che se
sono soddisfatte alcune ipotesi, il processo di
discretizzazione nel dominio del tempo, non produce
alcuna perdita d’informazione:
Sia f(t) un segnale con trasformata di Fourier F(), tale
che F()=0 per | c. Si ha, allora:
f t
f nT
s 2 c ;
infatti…..
sin c t nT
c t nT
T 2 / s
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
L’uscita
di
un
campionatore
può
essere
rappresentata come una serie numerica, i cui
elementi coincidono con i valori assunti dal segnale
tempo-continuo in istanti multipli del tempo di
campionamento
f(t)
T
{f(nT)}
Un segnale campionato può essere pensato come il
risultato del prodotto tra il segnale analogico e un
treno di impulsi di durata finita.
T
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Si ottiene un campionamento ideale quando s(t) è un
treno di impulsi di Dirac.
0
t0
s (t ) t
singolare t 0
La singolarità è tale che:
t dt 1
0
•Intuitivamente, la funzione impulso di Dirac può
essere immaginata come il limite per che tende a
zero dell’impulso di durata finita p(t).
•L’impulso di Dirac code della proprietà di selezione:
sia g(•) una funzione continua, si ha:
g t t dt g 0
0
4
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Il processo di campionamento equivale ad
un’operazione di modulazione ad ampiezza di impulsi
(PAM).
•il treno di impulsi costituisce la portante;
•il segnale da campionare rappresenta
modulante.
la
Il segnale campionato vale quindi:
f s t f t st
•il segnale s(t) è un segnale periodico di periodo T;
•ogni segnale x(t), ad energia finita può essere
espresso come:
xt n n t
t a, b
n
se sono soddisfatte le seguenti condizioni:
a)
b)
c)
i segnali n(t) formano un sistema ortonormale;
il sistema di segnali ortonormali è completo per il segnale x(t);
i coefficienti n si ottengono dalla relazione:
b
n xt n* t dt
a
5
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
In particolare il sistema di segnali:
T T
t ,
2 2
n
1 jn 2T t
n t e
T
è completo per tutti i segnali
x(t)
nell’intervallo (-T/2, T/2) e si può scrivere:
xt
e
jn
2
t
T
n
n
definiti
t T / 2, T / 2
2
jn t
1
n
xt e T dt
T T / 2
T /2
noto come sviluppo in serie esponenziale di Fourier.
NB: poiché i segnali utilizzati per lo sviluppo in serie
esponenziale di Fourier
sono ortonormali con
periodo T, quanto detto vale anche per un generico
segnale periodico.
xt
e
n
jn
2
t
T
n
2
jn t
1
T
n
x
t
e
dt
T T / 2
t ,
T /2
6
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Per il treno di impulsi si avrà:
s t
e
n
jn
2
t
T
n
e
n
2
, t ,
s
T
jn s t
n
T /2
1
jn s t
n
s
t
e
dt
T T / 2
Quindi, il segnale campionato assume la forma:
f s t f t
e
n
n
jn s t
2
s
, t ,
T
jn t
f
t
e
n
s
n
Si noti che tale segnale è un transiente ed è quindi
possibile calcolarne la trasformata di Fourier:
jn s t
F F n f t e
n
#
jn t
F
f
t
e
n
s
n
7
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Poiché la trasformata di Fourier di un segnale f(t) vale
per definizione:
F
f t e jt dt
Per il segnale campionato si ottiene:
F #
n
n
f t e
n
n
f t e jn s t e jt dt
j n s t
dt n F n s
n
Essendo F()=F(f(t)) la trasformata di Fourier del
segnale modulante.
8
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
L’operazione di campionamento introduce nuove
componenti spettrali che corrispondono alla
traslazione dello spettro in banda base F() del
segnale.
Se f(t) è un segnale con spettro limitato F()=0 per
| c e s c, allora le varie ripetizioni non si
sovrappongono ed il segnale originario può essere
ricostruito a meno di un fattore di scala elaborando il
segnale campionato f#(t), utilizzando un filtro che
abbia come funzione di trasferimento:
1
H
0
per c
per c
9
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Se la condizione s c non viene rispettata le
ripetizioni dello spettro del segnale originario si
sovrappongono e si incappa nel fenomeno
dell’alias. In tali condizioni non è più possibile
ricostruire
il
segnale
originario
attraverso
un’operazione di filtraggio.
10
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Nel caso di un campionatore ideale (si utilizza un
treno di impulsi di Dirac) si ha:
s t
t nT
n
f t f t t nT
*
n
f t t nT
n
f nT t nT
n
Il segnale campionato viene rappresentato da un
treno di funzioni impulsive e l’area di ogni impulso
corrisponde al valore del generico campione.
Nel dominio della frequenza si ha:
1
n
T
T /2
jn t
t
e
dt
s
T / 2
1
s t
T
1
F
T
*
e
jn s t
1
T
.
n
F n .
s
n
11
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Poiché f(t) è un segnale con spettro limitato è
possibile calcolare lo sviluppo in serie esponenziale
dello spettro. Si ha, quindi:
T
c ;
2
t ;
F f n e
jn
c
;
fn
1
2c
c
F e
c
jn
c
2 1
d
2 2c
F e
jn
c
d
Per la definizione di antitrasformata di Fourier di un
segnale vale la relazione:
1
X t
2
X e jt d ,
Il generico coefficiente del nostro sviluppo in serie di
potenze può essere, allora, riscritto come:
fn
c
n
f
c
,
12
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
quindi lo spettro del segnale assume la forma
jn
c
F
f n e
c
c
0
per c
per c .
e antitrasformando
1
f t
2
F e
n
n
f
c
j t
1
d
2
1
2
c
c
e
c
F e jt d
c
n
j t
c
d
c
c
n
j t n
n 1 e
f
n
c 2 c j t
c
c
c
n
n
j t n
j t
n 1 e
e
f
n
j t
c 2 c
c
c
c
c
c
13
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
n
n
j t n
j t
n
e
1
e
f
2j
c n
c t
c
c
c
c
c
n
c
sin t
n c
f
n
n
c
c
t
c
s 2 c
sin t nT c
essendo 2 2T .
,
f nT
t nT c
n
c s
2
14
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
La
formula
introdotta
nel
teorema
del
campionamento è nota come serie cardinale e la
funzione:
sin c t
g t
ct
è detta mantenitore cardinale e la pulsazione c=s/2
è nota in letteratura come frequenza di Nyquist..
Un mantenitore cardinale è un filtro non fisicamente
realizzabile. Esso può essere soltanto approssimato.
Per questo motivo:
•Si utilizza una frequenza di campionamento
superiore a quella prevista dal teorema di Shannon
(tipicamente 10 volte);
•Si utilizzano dei filtri ricostruttori o mantenitori.
I filtri più comunemente utilizzati sono:
•Il ricostruttore di ordine zero;
•Il ricostruttore del primo ordine;
•Il connettore ideale di punti.
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Il ricostruttore di ordine zero
E’ il filtro ricostruttore più comune ed è noto anche
come sample-and-hold o mantenitore di ordine zero.
Esso è caratterizzato dalla risposta all’impulso:
1
ht
0
0t T
altrove
16
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Il ricostruttore di ordine zero
Quindi la qualità (visiva) dell’approssimazione di un
segnale aumenta al diminuire dell’intervallo T.
La risposta in frequenza del S&H vale:
1 e sT
H ( s)
s
H ( j )
jT
1 e
j
2 e
2e
j
T
2
e
j
j
T
2
T
2
jT
1 e
2j
2e
j
T
2
e
j
T
2
e
2j
j
T
2
j sinT / 2
T
sin Te 2
.
2
/
2
T
T
NB: il S&H ha una fdt
che si annulla a s e
non a c, come
previsto
per
il
ricostruttore ideale!
17
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
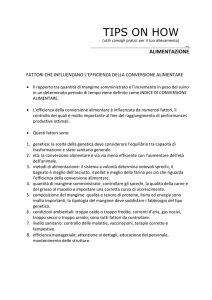
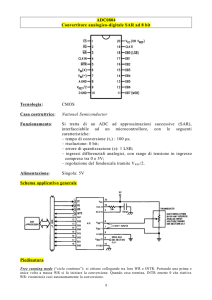
Il ricostruttore del primo ordine
Il filtro ricostruttore del primo ordine predice il
campione f((n+1)T) utilizzando la retta che passa per i
punti f((n-1)T) e f(nT).
f (nT ) f ((n 1)T )
(t nT )
T
per nT t (n 1)T ;
y (t ) f (nT )
e la risposta all’impulso è (per T=1):
u(t)+rect(t)-2u(t-1)-2rect(t-1)+u(t-2)+rect(t-2)
y(t)
f((n-1)T)
f(nT)
T
18
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
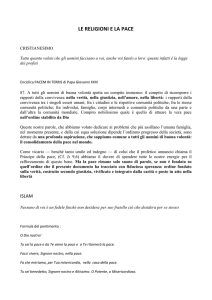
Il ricostruttore del primo ordine
Le corrispondenti fdt e risposta armonica valgono:
s 11 2e s e 2 s
H ( s)
s2
j 1 1 2e j e 2 j
.
H ( j )
2
( j )
NB:
la
risposta
in
frequenza di un FOH ha
una
minore
attenuazione alle basse
frequenze ma amplifica
le componenti ad alta
frequenza.
19
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Il ricostruttore del primo ordine
Le prestazioni di un FOH possono essere migliorate
utilizzando un filtro con correzione parziale della
velocità:
f (nT ) f ((n 1)T )
y (t ) f (nT )
(t nT )
T
per nT t (n 1)T ;
0 1
20
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Il connettore ideale di punti
Se è possibile accettare un ritardo di un campione, un
buon ricostruttore è il connettore ideale di punti.
t nT
(n 1)T t
y (t ) f (nT )
f n 1T
T
T
per nT t (n 1)T ;
e la risposta all’impulso è (per T=1):
h(t)=rect(t)-2rect(t-1)+rect(t-2)
21
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
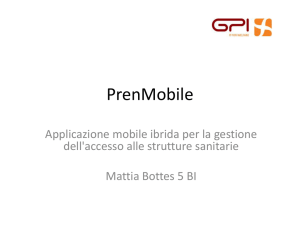
Il connettore ideale di punti
Le corrispondenti fdt e risposta armonica valgono:
1 2e
H ( s)
1 2e
H ( j )
s
s2
j
e 2 s
e 2 j
.
2
( j )
NB:
un
connettore
ideale ha caratteristiche
migliori in termini di
filtraggio
delle
componenti ad alta
frequenza
e
di
ampiezza
dei
lobi
secondari.
22
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Più in generale gli algoritmi di ricostruzione utilizzano
un numero ragionevolmente piccolo di campioni
vicini all’istante considerato.
In genere gli oscilloscopi digitali operanti in real-time
utilizzano 8 campioni in totale, 4 precedenti e 4
successivi l’istante considerato.
Ciascun campione viene pesato per un coefficiente,
conservato in una opportuna look-up table e sono
scelti in modo da ottimizzare le prestazioni del filtro
ricostruttore.
23
Parte I (Conversione D/A e A/D)
• La discretizzazione dei segnali
Per applicazioni particolari è possibile ricorrere a
filtri ricostruttori che utilizzano decine di campioni
del segnale originario, con un corrispondente
incremento di occupazione di memoria e di
carico computazionale.
24
Parte I (Conversione D/A e A/D)
• La conversione D/A
I convertitori D/A (Digital to Analog Converters)
rappresentano un’interfaccia tra i segnali digitali del
mondo dei computer e il mondo analogico.
Un D/A accatta come ingresso un segnale digitale e
fornisce un’uscita (in tensione o in corrente a seconda
della tecnologia utilizzata e dell’applicazione
prevista) dipendente dall’ingresso fornito, secondo la
relazione:
Vo K VFS a1 2 1 a2 2 2 ... an 2 n VOS
a1,…an
VREF
DAC
Vo
Essendo:
•Vo la tensione d’uscita;
•K il guadagno (tipicamente è K=1);
•a1,…,an la parola digitale da convertire;
•Vos la tensione di offset (tipicamente è Vos=0)
•VFS la tensione di fondo-scala (legata a VREF, valori tipici
sono 2.500, 5.000, 10.00, 5.120, 10.24 V o i corrispondenti
valori bipolari e 2.0mA).
Parte I (Conversione D/A e A/D)
• La conversione D/A
I convertitori D/A sono caratterizzati mediante
caratteristiche statiche e caratteristiche dinamiche.
Le caratteristiche statiche più importanti sono:
•La risoluzione ;
•La curva caratteristica ;
•L’errore di linerità;
•L’errore di monotonicità;
•L’accuratezza;
•La stabilità.
Le caratteristiche dinamiche più importanti sono:
•Il settling time;
•Il fenomeno del glitching.
Parte I (Conversione D/A e A/D)
• La conversione D/A
La risoluzione
La risoluzione di un convertitore è pari alla minima
variazione del segnale d’uscita che il dispositivo può
generare. Essa è pari a 1 LSB (Least Significant Bit) ed
è legata alla tensione di fondo scala e al numero di
bit (parallelismo del convertitore) dalla relazione:
VLSB=VFS/2n
1 LSB= 1/2n
se si tratta di un dispositivo unipolare
VLSB=VFS/2n-1
1 LSB= 1/2n-1
Nel caso di un dispositivo bipolare
Valori tipici di risoluzione vanno da 8 a 16 bit.
27
Parte I (Conversione D/A e A/D)
• La conversione D/A
La risoluzione
ESEMPIO: Un convertitore AD ad 8 bit ha una tensione di
riferimento pari a 5V.
•La tensione corrispondente alla parola 10110100 è:
Vref*(2-1+2-3+2-4+2-6)=Vref*(1/2+1/8+1/32+1/64)=3.5156V
•Il LSB vale:
1LSB=1/2-8=1/256
VLSB=5/256=19.5 mV
NB: espressioni equivalenti
risoluzione sono:
•8 bit di risoluzione,
•0.4% del fondo scala,
•1 parte su 256.
per
l’espressione
della
28
Parte I (Conversione D/A e A/D)
• La conversione D/A
La curva caratteristica
La curva caratteristica di un DA rappresenta il legame
esistente tra i codici in ingresso e i valori forniti in
uscita (tensione o corrente in accordo con la
tecnologia utilizzata)
VOS 0;
K 1.
Parte I (Conversione D/A e A/D)
• La conversione D/A
La curva caratteristica
Vengono definiti gli errori (in LSB) di:
•Offset
•Guadagno
EOS
VOUT
VLSB
;
0...0
con errore di offset annullato
VOUT
EK
VLSB
V
OUT
VLSB
1...1
2 N 1
0...0
NB: Le case costruttrici suggeriscono i circuiti da
utilizzare per eliminare tali cause di errore!
30
Parte I (Conversione D/A e A/D)
• La conversione D/A
La curva caratteristica
Finora si è fatta l’ipotesi che nel passaggio da una
parola alla successiva la variazione della tensione in
uscita sia sempre costante e pari a 1 LSB e che quindi
la curva caratteristica sia una retta. Nei dispositivi
reali, a causa di imperfezioni circuitali, i valori di
tensione in uscita non si trovano su una retta.
31
Parte I (Conversione D/A e A/D)
• La conversione D/A
La curva caratteristica
Dopo aver corretto l’errore di guadagno e di offset la
curva (retta) caratteristica viene determinata
attraverso un processo di approssimazione.
•Least-square fit
Utilizza il metodo dei minimi quadrati per determinare
la retta che approssima le uscite del DAC;
•Zero-base method
Determina la curva caratteristica imponendo il
passaggio per il primo punto e determinando il
guadagno minimizzando il valore assoluto dell’errore
massimo.
•Terminal-point method
Approssima la curva caratteristica con la retta che
passa per il primo e l’ultimo valore in uscita dal DAC.
32
Parte I (Conversione D/A e A/D)
• La conversione D/A
La linearità
L’errore di linearità indica lo scarto tra l’uscita reale di
un DAC e il corrispondete valore stimato utilizzando la
curva caratteristica. Vengono definite:
•L’integral nonlinearity error (INL)
è dato dal massimo scostamento dalla curva
interpolante (ottenuta con uno qualsiasi dei metodi
precedentemente introdotti);
•Il’differential nonlinearity error (DNL)
è dato, per ogni codice, dalla differenza tra la
variazione effettiva del segnale e la variazione
prevista di 1LSB;
33
Parte I (Conversione D/A e A/D)
• La conversione D/A
La linearità
L’errore di linearità viene espresso in frazioni del LSB o
in percentuale del valore di fondo scala.
•La monotonicità
Quando si incrementa di uno l’ingresso di un DAC ci si
aspetta che anche l’uscita cresca. Se ciò non accade si ha
un errore di monotonicità. Un DAC non monotono ha un
errore DNL superiore a 1LSB.
NB: Un buon DAC dovrebbe avere un errore di linearità
inferiore a 0.5 LSB e non presentare errore di monotonicità.
34
Parte I (Conversione D/A e A/D)
• La conversione D/A
L’accuratezza
Vengono spesso indicate:
•L’absolute accuracy
E’ lo scarto massimo tra l’uscita ideale prevista e l’uscita
reale del DAC (incluso l’errore di guadagno e di offset)
•Relative accuracy
E’ lo scarto massimo tra l’uscita ideale prevista e l’uscita
reale del DAC (dopo la correzione dell’errore di guadagno
e di offset e quindi coincide con l’INL).
NB: L’accuratezza non va confusa con la risoluzione.
Un DAC può avere, ad esempio, una risoluzione di 12
bit e un’accuratezza di soli 10 bit. Un buon DAC
dovrebbe garantire un’accuratezza migliore della
risoluzione.
35
Parte I (Conversione D/A e A/D)
• La conversione D/A
La Stabilità
Misura la dipendenza dei parametri caratteristici del
dispositivo dalla temperatura, dal tempo etc.
36
Parte I (Conversione D/A e A/D)
• La conversione D/A
Il Settling time
E’ il tempo impiegato dall’uscita di un DAC a portarsi in
prossimità del valore finale (in genere 0.5 LSB), dopo un
cambiamento di codice.
Il glitching
Quando il DAC riceve un nuovo codice, è necessario che
alcuni interruttori si chiudano e altri si aprano. Se i tempi
richiesti da queste operazioni sono diversi si generano in
uscita dei transitori di entità molto elevata.
37
Parte I (Conversione D/A e A/D)
• La conversione D/A
Esistono due principali famiglie di convertitori DA:
•Convertitori in tecnologia MOS
Sfruttano le eccellenti proprietà dei MOS come
interruttori di tensione;
•Convertitori in tecnologia bipolare
Utilizzano transistor BJT per la realizzazione di specchi
di corrente.
38
Parte I (Conversione D/A e A/D)
• La conversione D/A
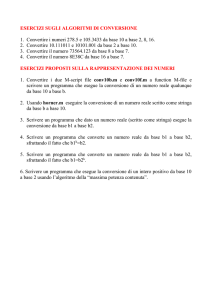
Il convertitore a resistenze pesate utilizza una rete di
resistenze, i cui valori crescono come potenze
successive di due, per realizzare i diversi bit della
parola da convertire.
2nR
4R 2R
R
+
-Vr
Il convertitore a resistenze pesate è un dispositivo
molto semplice. Esso tuttavia non è adatto alla
realizzazione di sistemi in tecnologia IC per il consumo
eccessivo di area di silicio dovuto alla realizzazione
della rete di resistenze.
Questo schema viene utilizzato soltanto per realizzare
convertitori discreti e a bassa risoluzione.
Parte I (Conversione D/A e A/D)
• La conversione D/A
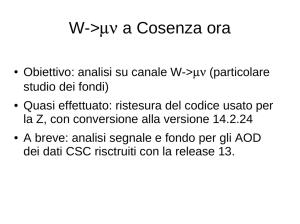
Il convertitore a rete R/2R utilizza, per realizzare i diversi
bit della parola da convertire, una rete di resistenze
caratterizzati soltanto da due diversi valori.
+
-Vr
Tipicamente il valore di R varia nell’intervallo 2.5k10k
Con questa tecnologia vengono spesso realizzati
dispositivi monolitici a a levata risoluzione.
Parte I (Conversione D/A e A/D)
• La conversione D/A
Entrambi i convertitori descritti producono un errore
dovuto alla corrente che attraversa la resistenza
equivalente del generatore di riferimento.
Ad esempio nella figura riportata il riferimento di
tensione presenta una resistenza interna pari a 200
Ciò causa un errore del DAC che dipende dal codice
in ingresso.
41
Parte I (Conversione D/A e A/D)
• La conversione D/A
Il problema dell’errore indotto dai fenomeni di
riscaldamento e di variazione della tensione di
riferimento viene risolto utilizzando la struttura a rete
R-2R invertita:
In questo caso:
•La corrente che attraversa la rete di resistenze è
costante;
•I dati in ingresso deviano la corrente a massa, o
all’ingresso del convertitore corrente tensione
(anch’esso al potenziale di massa grazie al principio
della massa virtuale).
NB: ai due terminali dell’op-amp sono disponibili valori
complementari di corrente.
42
Questa è la struttura più comunemente utilizzata per la
realizzazione di DAC in IC, specialmente in tecnologia CMOS
Parte I (Conversione D/A e A/D)
• La conversione D/A
I convertitori DA in tecnologia bipolare sfruttano la
possibilità di realizzare i BJT per realizzare pozzi di
corrente opportunamente commutati.
La pesatura delle correnti può essere ottenuta, in
linea di principio utilizzando transistor matched.
43
Parte I (Conversione D/A e A/D)
• La conversione D/A
L’intero DAC assume allora la forma:
…ed esistono strutture per limitare il range di
variazione delle aree dei transistor e/o dei valori di
resistenza richiesti.
44
Parte I (Conversione D/A e A/D)
• La conversione D/A
Sono stati realizzati anche DAC che utilizzando dei
capacitori, sia secondo la struttura a capacità
pesate, sia a rete C-2C:
Realizzando strutture con consumi estremamente
ridotti.
45
Parte I (Conversione D/A e A/D)
• La conversione D/A
Una rete di resistenze tutte uguali e una rete di
decodifica
permette
di
realizzare
un
DAC
rigorosamente monotono:
46
 • La discretizzazione dei segnali")